液态神经网络技术指南
一、引言
1.从传统神经网络到液态神经网络
神经网络作为深度学习的核心工具,在图像识别、自然语言处理、推荐系统等领域取得了巨大成功。尤其是卷积神经网络(CNN)、循环神经网络(RNN)、长短期记忆网络(LSTM)和 Transformer 架构的出现,让我们可以处理复杂的静态和时序数据。
然而,这些架构在处理持续变化的动态环境(如自动驾驶、机器人控制、金融市场预测等)时,仍面临不少挑战:
- 难以捕捉多尺度时间依赖关系
- 泛化能力差,在新环境下表现不稳定
- 对模型可解释性要求越来越高
正是在这样的背景下,液态神经网络(Liquid Neural Networks, LNN) 作为一种新兴架构被提出,其灵感来自神经科学,目标是让神经元在时间上具有动态响应能力,从而更好地适应快速变化的环境。
2.为什么要关注液态神经网络?
液态神经网络引入了一种前所未有的处理时序数据的方式,它并不仅仅是在时间维度上叠加传统神经网络,而是让神经元内部结构本身具有动态性和可调性。这带来了多个令人兴奋的优势:
- 更强的时间建模能力:通过神经元内部时间常数的动态调整,能处理极其复杂的时间变化模式。
- 更好的泛化能力:在没有微调的情况下,也能适应之前从未见过的情况。
- 可解释性强:相比深度黑盒模型,液态神经网络在一定程度上可以通过动态行为分析出决策逻辑。
- 轻量高效:特别适合在资源受限的边缘设备上部署。
这使得液态神经网络在机器人控制、自动驾驶、智能感知等领域展现出巨大的潜力。
二、液态神经网络简介
1.什么是液态神经网络?
液态神经网络(Liquid Neural Networks,LNN)是一类具有动态内部结构的神经网络,其灵感来源于生物神经系统,尤其是大脑中神经元如何以复杂、非线性的方式响应外部刺激。
与传统神经网络不同,液态神经网络的每个神经元在处理输入时,不再是静态线性或非线性变换,而是基于一个微分方程模型进行响应。这种建模方式使神经元的行为具有时间连续性和动态适应性。
换句话说,它不仅“记住”过去的信息,还能根据当前环境实时调整自身的动态特性,这对于感知、决策、预测等任务都非常关键。
该概念最初由麻省理工学院(MIT)的研究人员提出,代表性论文为 “A brain-inspired neural network for dynamic computing”(Nature Communications, 2021)。
2.与传统神经网络的核心区别
| 特性 | 传统神经网络(如 RNN / LSTM) | 液态神经网络(LNN) |
|---|---|---|
| 神经元模型 | 静态激活函数(如 ReLU、Tanh) | 动态响应(微分方程建模) |
| 时间建模方式 | 离散时间步 | 连续时间(ODE/DDE 模型) |
| 网络响应 | 固定映射 | 可随时间变化的非线性动态 |
| 泛化能力 | 需大量训练样本微调 | 在小样本下也能表现优异 |
| 可解释性 | 黑盒建模 | 可从微分方程中追踪状态演化路径 |
| 应用场景 | 静态输入/缓慢变化的数据 | 高动态环境(如自动驾驶、机器人) |
简而言之,液态神经网络不是结构更复杂,而是更接近真实神经系统的工作方式,其动态行为使其在高不确定性、实时响应要求强的场景中表现更加优异。
3.“液态”的含义
“液态”(Liquid)一词反映了该网络的动态性与柔性:
在传统网络中,结构和神经元的行为一经训练便基本固定;而在液态神经网络中,神经元会随着输入和时间持续发生“形变”,如同流动的液体一样,在环境变化时能够自适应地调整其反应曲线和状态轨迹。
这种持续可变的内在机制是液态神经网络名称的灵感来源,也体现了其与传统网络的根本差异。
很棒,进入第三章我们就要稍微“硬核”一点啦,下面是**“三、背后的理论基础”**的详细博客草稿,依然保持技术性与可读性的平衡,适合技术读者阅读。
三、背后的理论基础
液态神经网络的核心在于它从动态系统的角度对神经元行为进行建模,这与传统的“前馈函数堆叠”思路有本质不同。为了更好地理解液态神经网络,我们需要先掌握几个关键概念:动态系统建模、时间连续建模,以及神经元的数学行为模型。
1. 动态系统与微分方程建模
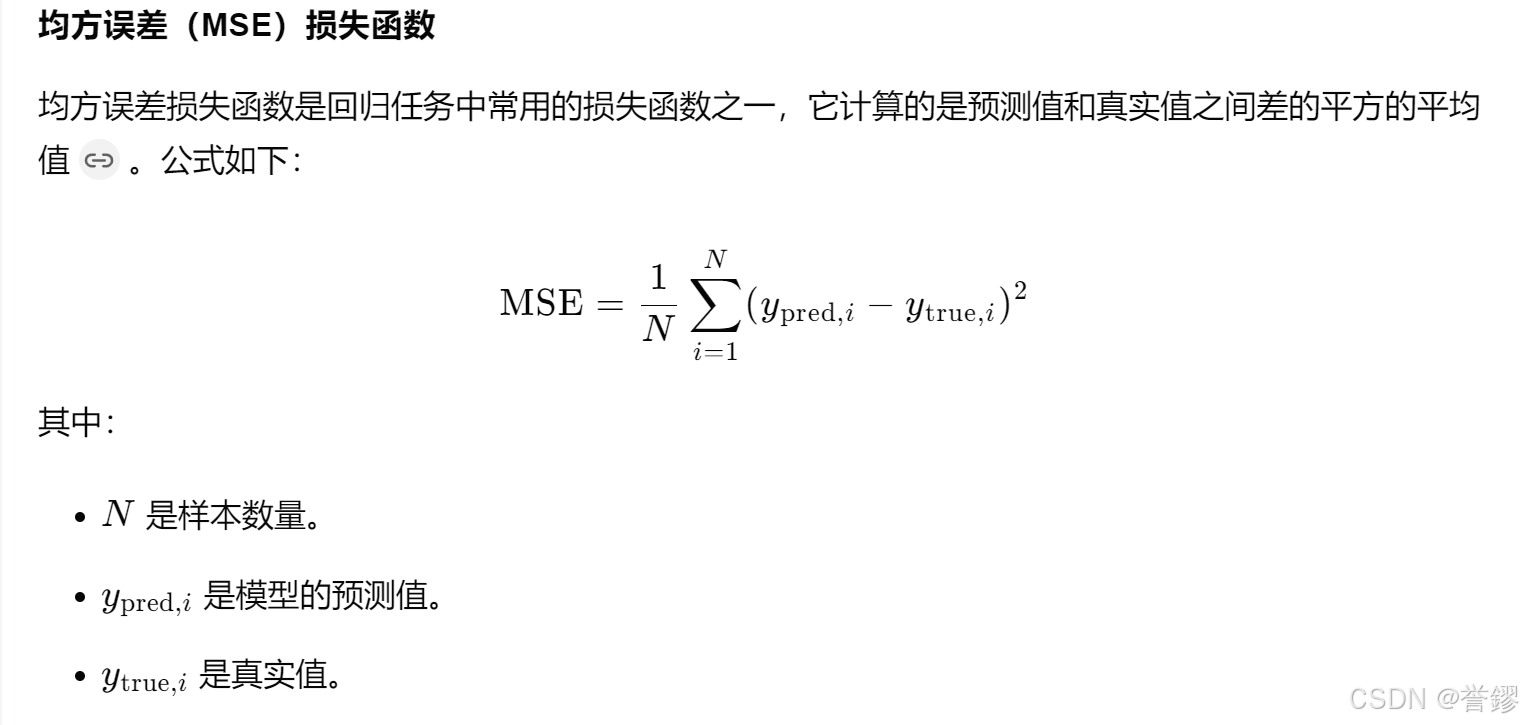
传统神经网络中,每层的输出是某种非线性激活函数(如 ReLU、Sigmoid)作用于加权输入的结果,形式上表示为:
y = σ ( W x + b ) y = \sigma(Wx + b) y=σ(Wx+b)
而在液态神经网络中,每个神经元不再是单一函数映射,而是一个随时间演化的动态系统,通常由一阶或二阶微分方程描述:
d x ( t ) d t = f ( x ( t ) , u ( t ) , θ ) \frac{dx(t)}{dt} = f(x(t), u(t), \theta) dtdx(t)=f(x(t),u(t),θ)
其中:
- ( x ( t ) ) ( x(t) ) (x(t)):神经元在时间 ( t ) ( t ) (t) 的内部状态
- ( u ( t ) ) ( u(t) ) (u(t)):输入信号
- ( θ ) ( \theta ) (θ):参数,如权重、时间常数等
- ( f ) ( f ) (f):非线性动态函数
也就是说,神经元的状态不是“瞬间”变化,而是在时间维度上逐渐演化,响应输入的过程更接近自然界中神经元的连续变化。
2. 时间连续建模 vs 离散建模
| 对比项 | 离散建模(RNN 等) | 连续建模(液态神经网络) |
|---|---|---|
| 时间处理方式 | 以固定步长更新状态 | 使用微分方程连续建模 |
| 表达能力 | 有限,受时间分辨率限制 | 能建模微小且快速的状态变化 |
| 模拟精度 | 容易错过瞬时变化 | 高度拟合现实时间演化过程 |
| 训练方法 | BPTT(Backprop Through Time) | 可结合 ODE Solver 与梯度传播 |
液态神经网络基于**ODE(常微分方程)**来建模神经活动,甚至可以扩展到 DDE(Delay Differential Equations) 用于建模延迟效应。在实现层面,可利用诸如 TorchDiffEq 这样的工具进行求解和训练。
3. 神经元行为的数学模型
液态神经网络支持更复杂的生物学启发模型,例如:
3.1.Firing Rate Model(发放率模型)
- 将神经元的活动建模为某种激活频率(rate),适合连续建模。
- 通常形式如下:
τ d x ( t ) d t = − x ( t ) + f ( W x ( t ) + u ( t ) ) \tau \frac{dx(t)}{dt} = -x(t) + f(Wx(t) + u(t)) τdtdx(t)=−x(t)+f(Wx(t)+u(t))
其中 ( τ ) ( \tau ) (τ) 是时间常数, ( f ) ( f ) (f) 是非线性函数,如 tanh 或 sigmoid。
3.2.Spiking Neuron Model(脉冲神经元)
- 更接近生物神经元,例如 Leaky Integrate-and-Fire (LIF) 模型。
- 神经元以“脉冲”形式响应输入,在达到阈值时“发放”。
- 更适合构建 Spiking Liquid Networks,但训练复杂度更高。
3.3.Liquid Time-constant (LTC) 模型
- MIT 的液态神经网络采用了一种动态调整时间常数 ( τ ) ( \tau ) (τ) 的形式:
d x i ( t ) d t = − 1 τ i ( x i , u ) x i ( t ) + f ( ⋅ ) \frac{dx_i(t)}{dt} = -\frac{1}{\tau_i(x_i, u)} x_i(t) + f(\cdot) dtdxi(t)=−τi(xi,u)1xi(t)+f(⋅)
- 时间常数 τ i \tau_i τi 不是固定的,而是神经元状态和输入的函数,具有极高的灵活性。
通过引入微分方程和时间连续建模,液态神经网络实现了对神经元行为更真实的模拟,同时大幅提升了其对时序数据的表达能力。
四、核心架构与原理
液态神经网络的核心在于其神经元的动态演化机制,其中最具代表性的架构是 MIT 提出的 Liquid Time-constant Networks(LTC)。LTC 网络不是依赖层级堆叠来提高表达能力,而是通过微分方程 + 动态时间常数来实现强大的时序建模能力。
1. Liquid Time-constant Networks (LTC)
LTC 网络中的每个神经元都由一个非线性微分方程控制,其内部状态随时间演化。其基本数学形式如下:
d x i ( t ) d t = − 1 τ i ( x i , u ) x i ( t ) + f ( ∑ j w i j x j ( t ) + u i ( t ) ) \frac{dx_i(t)}{dt} = -\frac{1}{\tau_i(x_i, u)} x_i(t) + f\left(\sum_j w_{ij} x_j(t) + u_i(t)\right) dtdxi(t)=−τi(xi,u)1xi(t)+f(j∑wijxj(t)+ui(t))
解释如下:
- ( x i ( t ) ) ( x_i(t) ) (xi(t)):神经元 ( i ) ( i ) (i) 在时刻 ( t ) ( t ) (t) 的内部状态;
- ( τ i ( x i , u ) ) ( \tau_i(x_i, u) ) (τi(xi,u)):动态时间常数,是状态和输入的函数,不再是固定值;
- ( w i j ) ( w_{ij} ) (wij):连接权重;
- ( u i ( t ) ) ( u_i(t) ) (ui(t)):外部输入;
- ( f ( ⋅ ) ) ( f(\cdot) ) (f(⋅)):非线性激活函数。
关键点: 神经元不仅仅根据输入响应,而是通过“自我调节”的时间常数,决定自身状态的演化快慢 —— 这就像一个神经元根据环境自动决定“多久才做出反应”。
2. 神经元内部时间常数的动态性
在传统模型中,时间常数是固定的,例如:
d x ( t ) d t = − 1 τ x ( t ) + f ( ⋅ ) \frac{dx(t)}{dt} = -\frac{1}{\tau} x(t) + f(\cdot) dtdx(t)=−τ1x(t)+f(⋅)
而在 LTC 中:
- 时间常数 ( τ ) ( \tau ) (τ) 是 可学习的;
- 更进一步, ( τ ) ( \tau ) (τ) 可以是状态依赖的,例如:
τ i ( x i , u ) = σ ( a i T x i + b i T u + c i ) \tau_i(x_i, u) = \sigma(a_i^T x_i + b_i^T u + c_i) τi(xi,u)=σ(aiTxi+biTu+ci)
这种结构使得每个神经元在不同的时间、输入状态下,反应速度和频率都可以变化,从而大大增强了模型的表达能力和灵活性。
结果就是:即使只有几百个神经元,LTC 模型也能在复杂时序任务中表现媲美大型 Transformer 模型。
3. 网络结构与连接方式
LTC 网络整体结构看起来和传统神经网络类似,但其内部机制完全不同:
- 层结构:可以堆叠多层 LTC 神经元,但往往一层已具备强大建模能力;
- 连接方式:可采用全连接、稀疏连接、甚至是图神经网络式连接;
- 输出层:通常采用线性层进行回归或分类输出。
此外,MIT 团队发现:液态神经网络在仅有少量参数的情况下,也可以实现复杂的动作控制和感知任务,这使得它非常适合用于**边缘设备、实时系统、甚至神经拟态硬件(neuromorphic hardware)**中部署。
4. 与 RNN、LSTM、Transformer 的对比
| 模型类型 | 时间建模方式 | 可解释性 | 泛化能力 | 计算效率 | 参数量(相同任务下) |
|---|---|---|---|---|---|
| RNN | 离散、固定更新 | 低 | 一般 | 高 | 中等 |
| LSTM | 引入门控机制 | 中等 | 较强 | 较低 | 中高 |
| Transformer | 全局注意力机制 | 极低 | 强(需大数据) | 较低 | 极高 |
| 液态神经网络(LTC) | 连续时间微分建模 | 高 | 强(小样本) | 高 | 低 |
小结:
液态神经网络的优势并不在“更大”,而在“更聪明”:
它以类似生物神经元的方式工作,让每个神经元变得“有弹性”,具备自适应能力。
五、液态神经网络的优势
液态神经网络并不是为了替代 Transformer 或 LSTM 而诞生的,它的使命是在需要时间建模强、实时性高、泛化能力强、可部署在边缘的场景中,提供一个更优雅、高效的解决方案。
下面我们从三个核心方面来看它的优势:
1. 更好的时间建模能力
传统时序模型(如 RNN / LSTM)是以离散的时间步来处理数据的,这意味着它们很容易漏掉微妙的、快速变化的模式。而液态神经网络使用的是连续时间微分建模(ODE),这在时间序列处理上带来了质的提升:
- 高时间分辨率:能够自然建模细粒度、异步事件(如机器人感知、金融数据波动);
- 内在时间记忆机制:动态时间常数让每个神经元“记住多久前发生了什么”;
- 异步输入友好:处理频率不固定的数据流不再需要重采样或对齐操作。
应用案例:MIT 团队的研究表明,液态神经网络在自动驾驶场景中比 LSTM 更早预测障碍物移动趋势。
2. 更强的泛化能力与鲁棒性
液态神经网络的另一个显著优势是:它并不需要海量数据微调,也能很好地泛化到新环境中。
这源于以下几个原因:
- 结构非线性丰富:微分建模本身就具备对复杂动态的强适应能力;
- 时间常数动态调节机制:允许神经元在不同环境下调整自身行为;
- 对输入扰动不敏感:其状态演化具有“惯性”,不容易因小干扰产生剧烈反应;
- 轻量但有效:在参数量远小于 Transformer 的前提下,也能在 OOD(out-of-distribution)数据中表现优异。
实验对比:在训练于正常天气的自动驾驶数据后,LTC 模型能直接适应雨天和夜间场景,而 LSTM 和 Transformer 出现性能明显下降。
3. 可解释性(Interpretability)
相比黑盒的 Transformer,液态神经网络提供了更高程度的可解释性,这对科研和高风险行业(如医疗、金融)至关重要。
- 状态轨迹可追踪:每个神经元的状态变化可以通过微分方程“复盘”;
- 生物学启发结构:更容易映射到现实中神经元的行为;
- 基于时间响应的可视化:可以分析不同输入如何影响神经元反应时间和强度;
- 局部灵敏度分析:能够通过时间常数的变动推断模型对某些输入维度的依赖程度。
这种“动态可解释性”不仅让我们更容易理解模型做了什么,还可以在实际部署中进行行为诊断和调试。
总结一句话:
液态神经网络就像是一群随环境自我调节的“神经生物体”,不是单纯追求记忆更长、参数更多,而是追求响应更合理、行为更可解释。
六、典型应用场景
液态神经网络不仅在理论上具备优势,在多个现实世界的复杂任务中也展现出了强大适应性与表现力,尤其是在那些要求实时响应、高鲁棒性、低功耗部署的场景中。
1. 自动驾驶与无人机
液态神经网络因其出色的时间建模能力与泛化性能,在自动驾驶和无人系统中备受关注:
- 轨迹预测:能够捕捉目标车辆/行人的非线性动态演化,提前预测意图;
- 异常检测:在无需大规模训练的情况下,也能识别突发情况(如闯入、急停);
- 无人机控制:支持高频传感器数据(IMU、GPS、雷达等)融合,控制反应迅速、精度高。
案例:Wayve(英国自动驾驶公司)在 MIT 合作研究中,用液态神经网络成功构建了小型端到端决策系统,能在复杂交通环境中实时调整策略。
2. 智能机器人与控制系统
在机器人控制领域,LNN 能提供远超传统 PID 或神经控制器的响应效果:
- 动态环境适应:机器人在搬运、人机协作、障碍规避等任务中表现更加灵活;
- 自主学习反应策略:通过学习动态控制规律,无需大量动作标签;
- 低延迟响应机制:适合实时决策场景,不依赖云端推理。
案例:MIT-CSAIL 团队在四足机器人实验中,使用仅数百个液态神经元就实现了高精度的导航与路径规划任务。
3. 实时动态环境感知
液态神经网络尤其适合处理快速变化的多模态传感数据:
- 视觉-传感融合:处理视频流 + 激光雷达等多源数据,保持时序一致性;
- 连续动作识别:应用于行为识别、安全监控、工业检测等;
- 异常行为感知:检测系统状态或人类行为中潜在的非线性突变。
案例:在实时人群行为预测实验中,LNN 展现了对突发行为(如快速奔跑、突然掉头)的敏感捕捉能力。
4. 边缘计算场景中的高效部署
由于液态神经网络的高效性和结构紧凑,它天然适合部署在边缘设备中,如:
- 智能手机与可穿戴设备;
- 车载计算单元;
- Neuromorphic 芯片(如 Intel Loihi、BrainScaleS);
- 家庭 IoT 系统中的智能识别模块。
优势表现:
- 低功耗高性能:神经元数远少于 Transformer,却能完成复杂任务;
- 可压缩与量化友好:结构简洁,利于模型压缩与边缘部署;
- 隐私保护与延迟优化:无需上云,在本地设备即可完成推理。
小结一句话:
液态神经网络最适合“变化快、反应要快、设备资源还有限”的场景,它是小而强、灵而稳的代表。
七、开源项目与实现
尽管液态神经网络仍处于发展初期,但已经有一些优秀的开源实现和研究框架可供参考。这些项目为开发者提供了从理论验证到工程部署的基础设施支持,也推动了 LNN 的生态成长。
1. LiquidNet、Liquid-SNN 等开源框架介绍
Liquid Time-constant Networks(MIT 官方实现)
- 作者:MIT CSAIL 团队
- 框架:TensorFlow(包含自定义 ODE 神经元结构)
- 特点:
- 完整复现论文实验;
- 支持动态时间常数建模;
- 提供驾驶控制、行为预测等案例;
Liquid-SNN
- 作者:IBM Neuromorphic Research
- 框架:PyTorch
- 特点:
- 基于 spiking neuron 架构;
- 结合 LIF(Leaky Integrate-and-Fire)模型;
- 支持 neuromorphic 芯片上的仿真部署。
torchdiffeq
- 作者:Chen et al.(ODE-Net 相关作者)
- 虽非专为 LNN 设计,但适合作为液态神经元建模的核心工具库;
- 提供:
- 神经 ODE 接口;
- 后向梯度求解器;
- 多种微分方程求解器(Euler, RK4 等);
2. 示例代码片段(基于 PyTorch + torchdiffeq)
下面是一个简化版的液态神经元实现,用于构建一个最小的 LNN 层:
import torch
import torch.nn as nn
from torchdiffeq import odeintclass LiquidNeuron(nn.Module):def __init__(self, input_size):super().__init__()self.w = nn.Parameter(torch.randn(input_size))self.b = nn.Parameter(torch.zeros(1))self.alpha = nn.Parameter(torch.tensor(1.0)) # 控制时间常数def forward_dynamics(self, t, x):# dx/dt = -alpha * x + tanh(w·x + b)return -self.alpha * x + torch.tanh(torch.matmul(x, self.w) + self.b)def forward(self, x0, t=torch.linspace(0, 1, 10)):return odeint(self.forward_dynamics, x0, t)# 示例使用
neuron = LiquidNeuron(input_size=4)
x_init = torch.randn(4) # 初始状态
out = neuron(x_init) # 输出是多个时间步下的状态序列
3. PyTorch / TensorFlow 中的构建建议
PyTorch 实现建议:
- 搭配
torchdiffeq实现微分求解; - 使用
autograd支持梯度反传; - 可通过自定义
odeint回调整合入nn.ModuleList,实现多神经元/多层网络。
TensorFlow 实现建议:
- 使用
tfp.math.ode系列或自定义 Runge-Kutta 求解器; - 动态时间常数可以用
tf.Variable实现; - 支持动态图和静态图混合编程。
提示:在训练液态神经网络时,注意控制微分方程求解的精度与速度权衡,避免梯度爆炸或消失。
好的,下面是第八章:挑战与研究前沿的详细草稿。这一章非常重要,不仅帮助读者建立对液态神经网络的全面认知,也能体现你作为作者的前瞻性和深度思考。
八、挑战与研究前沿
尽管液态神经网络(LNN)在许多任务中展现出独特优势,但作为一项相对年轻的技术,它仍面临一些挑战,尤其是在训练方法、计算效率与可扩展性方面。同时,液态网络也为未来的深度学习模型设计和神经可解释性研究提供了丰富的探索方向。
1. 训练难度与优化问题
由于液态神经网络引入了微分方程和动态时间常数,其训练过程相较于传统网络更为复杂:
问题:
- 梯度计算复杂:LNN 通常依赖微分方程求解器(ODE solver),这可能带来梯度不稳定或消失的问题;
- 求解器精度与效率权衡:高精度 ODE 求解器计算成本高,低精度则易导致误差积累;
- 参数调节难度大:每个神经元的行为依赖多个相互耦合的动态参数,不易初始化与收敛;
- 不支持大规模并行化:微分建模天然是“时间顺序依赖”,难以像 Transformer 那样高效并行。
解决方向:
- 使用神经 ODE 的自适应求解器提升训练稳定性;
- 引入结构正则化和梯度裁剪来防止训练发散;
- 探索基于 隐式求解器 的稳定训练机制;
- 将 LNN 和 强化学习/元学习结合,提升参数学习效率。
2. 模型规模与计算成本
虽然 LNN 在“小模型”下表现优异,但其扩展到大规模任务时仍存在瓶颈:
问题:
- 计算成本受限于 ODE 求解步数;
- 不适合传统 GPU 优化管线(相比 Transformer 的矩阵乘并行);
- 缺乏硬件友好实现:对 neuromorphic 芯片虽然友好,但主流硬件仍需大量适配;
对策与探索:
- 使用 混合模型:LNN 作为局部处理器,结合 CNN / Transformer 做多模态融合;
- 引入 稀疏连接机制 降低整体通信成本;
- 与 事件驱动架构(event-driven computing) 结合,用于处理异步数据流;
- 在 边缘芯片 + LNN 联合优化 方向开展研究(如在 Intel Loihi 上部署);
3. 未来研究方向与发展趋势
液态神经网络的发展仍处于“刚刚起飞”的阶段,未来的研究有以下几个值得关注的方向:
理论研究:
- 神经动力学的可解释性建模;
- 时间常数的生物学对照与可视化;
- LNN 与脑启发模型(如 predictive coding)结合的潜力。
模型融合与架构创新:
- 与 Transformer 架构融合:构建 时间感知型注意力网络;
- 与图神经网络(GNN)结合:应用于动态图、拓扑变换任务;
- 可微控制系统:用于复杂物理系统的实时控制与模拟。
应用拓展:
- 脑机接口(BCI)与神经康复系统;
- 工业机器人中长时序感知与动作规划;
- 异步传感网络中的状态预测与容错控制;
- 面向未来 AI 芯片的定制神经建模模块。
小结一句话:
液态神经网络的核心挑战在于“如何稳定、高效地训练这个动态系统”,
而它的未来潜力则在于“成为下一代小而强、可解释、灵活适应的智能计算核心”。
好的!以下是第九章:总结与展望的内容草稿,这是博客的收尾部分,我们要把前面讲的内容归纳升华,并提供学习建议与思考方向,让读者带着启发离开文章
九、总结与展望
液态神经网络的意义
液态神经网络(Liquid Neural Networks, LNN)以其动态性、自适应性、可解释性,为深度学习领域注入了新的活力。它将“神经网络”从静态映射变为一个持续响应、随环境演化的动态系统,这不仅更加接近生物神经元的真实工作方式,也让模型在复杂、变化剧烈的现实世界中具备了更强的生存能力。
LNN 不靠“更深的网络”或“更多的参数”堆砌性能,而是通过引入时间和动态系统的概念,实现了以小博大、以动制稳的模型表达方式。
对现有 AI 架构的启示
液态神经网络带来了几个对未来 AI 模型设计极具价值的启示:
- 动态性胜过静态结构:模型内部机制可变,远比死板的层堆叠更灵活;
- 局部智能优于全局计算:通过神经元级别的动态行为,可以减少全局参数依赖,提升系统模块化与可控性;
- 可解释性不应被忽视:LNN 提供了一个可追踪、可分析、可干预的模型演化路径,为“白盒 AI”打下基础;
- 边缘计算与能效是未来重点:液态网络以小模型实现高性能,正是边缘 AI 和低碳 AI 的发展方向。
这些理念不仅适用于学术研究,也为工业界推动“新一代神经网络架构”提供了思路参考。
下一步学习或研究建议
如果你希望进一步学习或深入研究液态神经网络,以下路线或资源可供参考:
推荐阅读:
- A Brain-Inspired Neural Network for Dynamic Computing (Nature, 2021)
- Neural ODEs (NeurIPS 2018)
- Liquid Time-constant Networks GitHub 项目
深度研究方向:
- 构建多层 LNN 的稳定训练策略;
- 与 Transformer、GNN 等模型的融合架构;
- 在小样本 / 零样本学习中的泛化能力探索;
- 基于 LNN 的可解释 AI 工具链设计。
实践建议:
- 使用 PyTorch +
torchdiffeq进行实验模拟; - 在时序数据(如交通预测、运动识别、传感器数据)上测试;
- 尝试部署到 Raspberry Pi / Jetson Nano 等边缘设备中做性能评估。
最后一句话:
液态神经网络不是一个短期爆火的“新模型”,
而是一个可能改变我们理解神经网络本质方式的深层次变革。
十、参考资料与延伸阅读
以下是关于液态神经网络相关的经典论文、博客文章和开源实现资源,涵盖理论基础、应用案例以及开发工具,适合进一步学习或研究使用。
论文推荐
-
A brain-inspired neural network for dynamic computing
Hasani et al., Nature Communications, 2021
https://www.nature.com/articles/s41467-021-25801-2液态时间常数网络(LTC)的开创性论文,首次提出动态神经元时间建模机制。
-
Neural Ordinary Differential Equations
Chen et al., NeurIPS 2018
https://arxiv.org/abs/1806.07366神经微分方程(Neural ODE)奠定了 LNN 的微分建模基础,适用于任意动态系统。
-
Liquid Neural Networks with Uncertain Inputs
Hasani et al., ICRA 2023
https://arxiv.org/abs/2303.15871探讨液态网络在非结构化/带噪输入下的表现,强调其鲁棒性优势。
-
ODE-RNN: Combining Recurrent Neural Networks and Ordinary Differential Equations for Irregularly-Sampled Time Series
https://arxiv.org/abs/1907.03907用于处理非均匀时间采样序列,是对 LNN 思路的补充与延展。
技术博客推荐
-
MIT CSAIL Blog:Liquid Networks - Think like a neuron
https://news.mit.edu/2021/liquid-neural-networks-0128通俗解释液态神经网络背后的科学逻辑与工程实现。
-
Jay Alammar 的神经 ODE 可视化解读
https://jalammar.github.io/visual-intro-to-neural-ode/非常直观的动画讲解,适合初学者理解微分方程在神经网络中的应用。
-
Wayve Blog:Liquid Neural Networks for Driving
https://www.wayve.ai/blog/brain-inspired-liquid-networks/液态神经网络在自动驾驶系统中的落地与挑战分析。
开源代码 & 实现
| 项目名称 | 地址 | 说明 |
|---|---|---|
| LTC-Networks (MIT 官方) | https://github.com/maithrasha/Liquid-Time-constant-Networks | 包含完整论文复现与驾驶控制实验 |
| liquid-snn | https://github.com/NeuromorphicComputationResearchProgram/liquid-snn | 脉冲液态神经网络(Spiking LNN)实现 |
| torchdiffeq | https://github.com/rtqichen/torchdiffeq | PyTorch 的神经微分求解库,适配液态神经元建模 |
| LNN Playground(社区项目) | https://github.com/KordingLab/lnn-playground | 提供多个简单的 LNN 结构实验案例,便于入门 |
额外学习资源
-
MIT 6.S191: Introduction to Deep Learning 2021
包含关于液态网络和神经微分系统的讲解课程; -
SpikingJelly
国内团队开发的脉冲神经网络框架,适合扩展探索 LNN + SNN 结合方向。
建议:从阅读 MIT 的 LTC 原始论文 + 跑一次开源代码开始,
然后尝试自己基于torchdiffeq复现一个带动态时间常数的神经元,是入门 LNN 的不错路径。
相关文章:

液态神经网络技术指南
一、引言 1.从传统神经网络到液态神经网络 神经网络作为深度学习的核心工具,在图像识别、自然语言处理、推荐系统等领域取得了巨大成功。尤其是卷积神经网络(CNN)、循环神经网络(RNN)、长短期记忆网络(LS…...

element-plus中,表单校验的使用
目录 一.案例1:给下面的表单添加校验 1.目的要求 2.步骤 ①给需要校验的el-form-item项,添加prop属性 ②定义一个表单校验对象,里面存放了每一个prop的检验规则 ③给el-form组件,添加:rules属性 ④给el-form组件࿰…...
PyTorch复现线性模型
【前言】 本专题为PyTorch专栏。从本专题开始,我将通过使用PyTorch编写基础神经网络,带领大家学习PyTorch。并顺便带领大家复习以下深度学习的知识。希望大家通过本专栏学习,更进一步了解人更智能这个领域。 材料来源:2.线性模型_…...

Kafka+Zookeeper从docker部署到spring boot使用完整教程
文章目录 一、Kafka1.Kafka核心介绍:核心架构核心特性典型应用 2.Kafka对 ZooKeeper 的依赖:3.去 ZooKeeper 的演进之路:注:(本文采用ZooKeeper3.8 Kafka2.8.1) 二、Zookeeper1.核心架构与特性2.典型…...
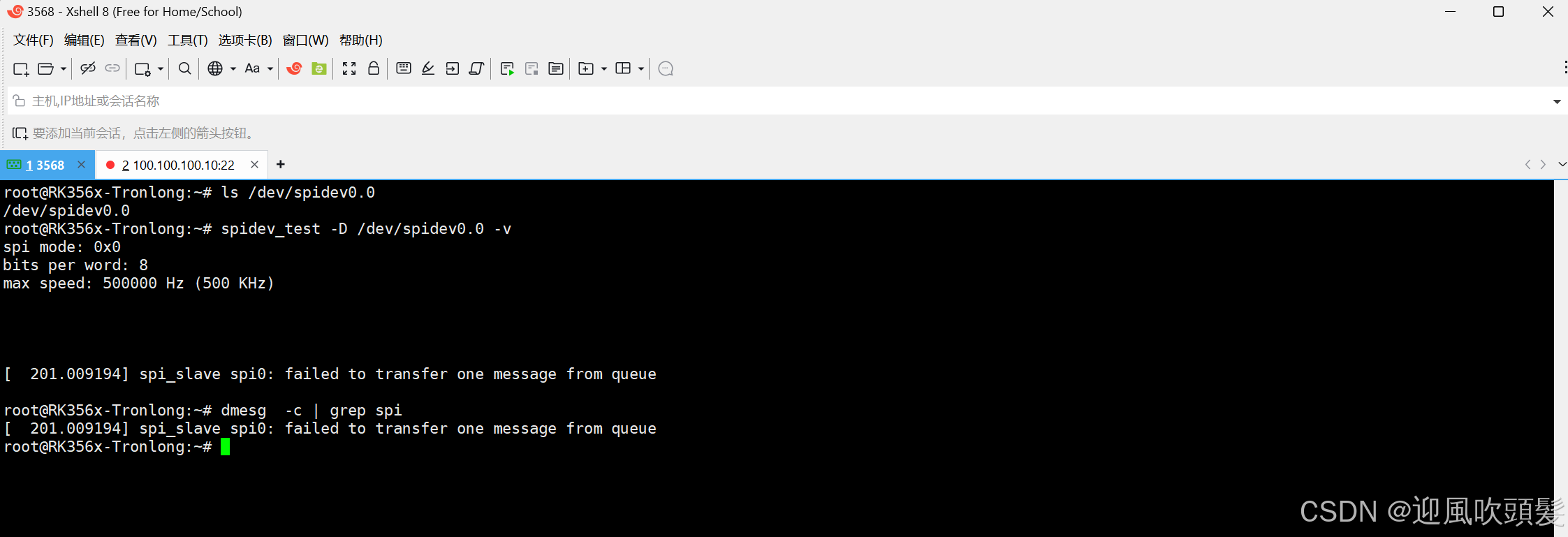
RK3568驱动 SPI主/从 配置
一、SPI 控制器基础配置(先说主的配置,后面说从的配置) RK3568 集成高性能 SPI 控制器,支持主从双模式,最高传输速率 50MHz。设备树配置文件路径通常为K3568/rk356x_linux_release_v1.3.1_20221120/kernel/arch/arm64/boot/dts/rockchip。 …...

【全队项目】智能学术海报生成系统PosterGenius--风格个性化调整
🌈 个人主页:十二月的猫-CSDN博客 🔥 系列专栏🏀大模型实战训练营 💪🏻 十二月的寒冬阻挡不了春天的脚步,十二点的黑夜遮蔽不住黎明的曙光 1.前言 PosterGenius致力于开发一套依托DeepSeek…...
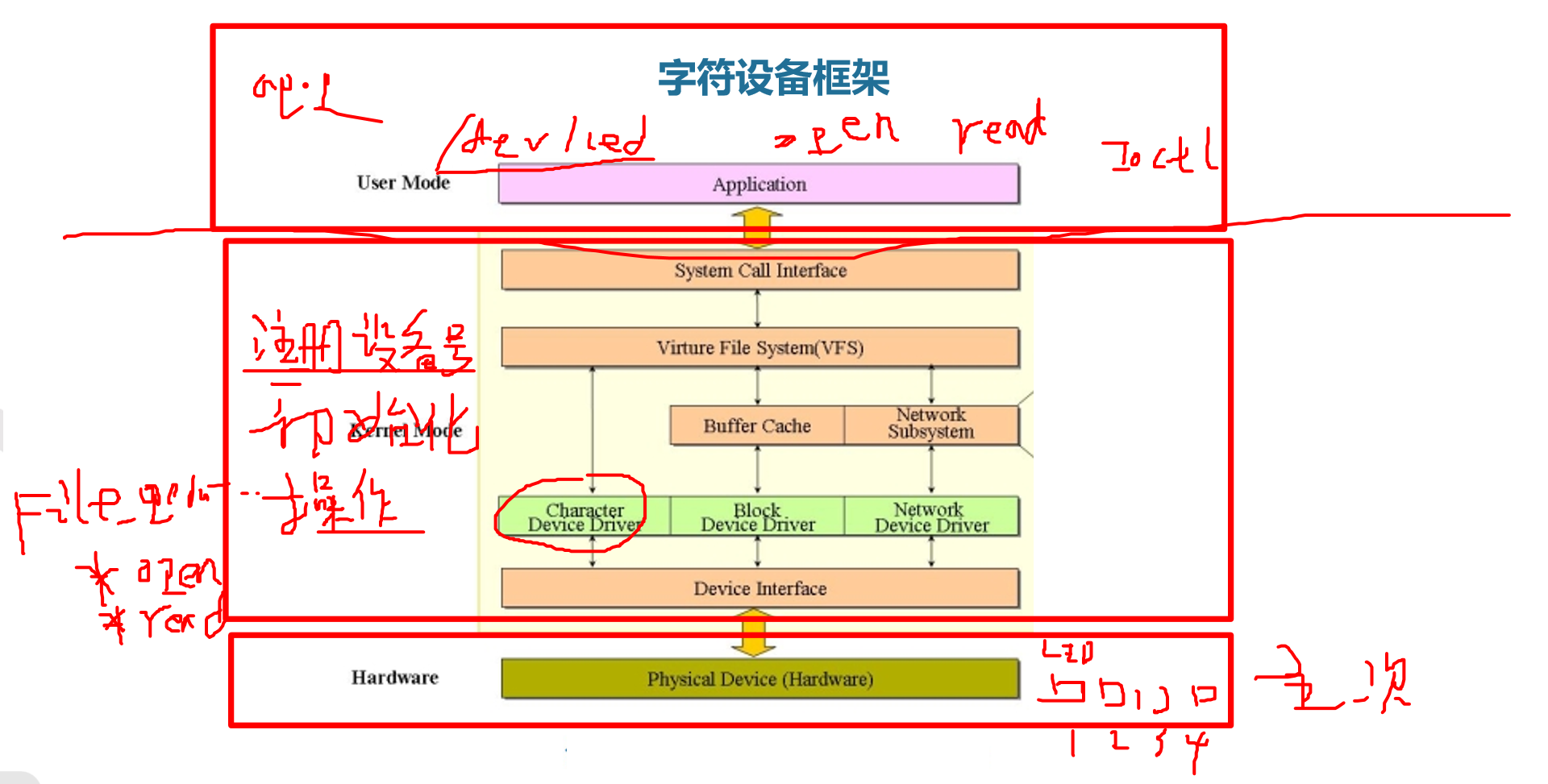
【系统移植】(六)第三方驱动移植
【系统移植】(六)第三方驱动移植 文章目录 【系统移植】(六)第三方驱动移植1.编译驱动进内核方法一:编译makefile方法二:编译kconfig方法三:编译成模块 2.字符设备框架 编译驱动进内核a. 选择驱…...
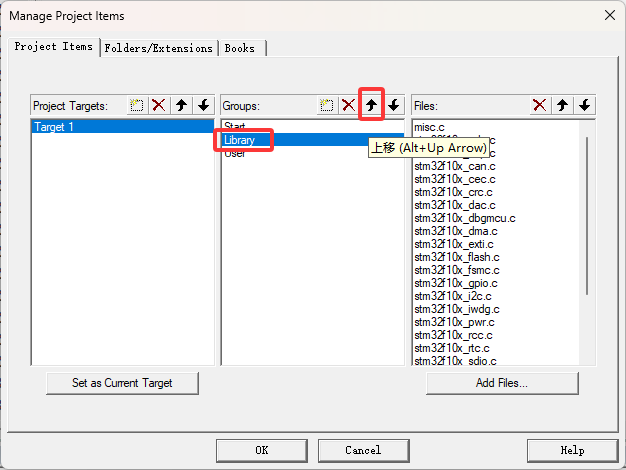
STM32实现一个简单电灯
新建工程的步骤 建立工程文件夹,Keil中新建工程,选择型号工程文件夹里建立Start、Library、User等文件夹,复制固件库里面的文件到工程文件夹工程里对应建立Start、Library、User等同名称的分组,然后将文件夹内的文件添加到工程分组…...

【shiro】shiro反序列化漏洞综合利用工具v2.2(下载、安装、使用)
1 工具下载 shiro反序列化漏洞综合利用工具v2.2下载: 链接:https://pan.baidu.com/s/1kvQEMrMP-PZ4K1eGwAP0_Q?pwdzbgp 提取码:zbgp其他工具下载: 除了该工具之外,github上还有其他大佬贡献的各种工具,有…...
vue进度条组件
<div class"global-mask" v-if"isProgress"><div class"contentBox"><div class"progresstitie">数据加载中请稍后</div><el-progress class"progressStyle" :color"customColor" tex…...
:矩阵加减法与SIMD集成)
【C++游戏引擎开发】《线性代数》(2):矩阵加减法与SIMD集成
一、矩阵加减法数学原理 1.1 定义 逐元素操作:运算仅针对相同位置的元素,不涉及矩阵乘法或行列变换。交换律与结合律: 加法满足交换律(A + B = B + A)和结合律( ( A + B ) + C = A + ( B + C ) )。 减法不满足交换律(A − B ≠ B − A)。1.2 公式 C i j = …...

UE5Actor模块源码深度剖析:从核心架构到实践应用
UE5 Actor模块源码深度剖析:从核心架构到实践应用 a. UE5 Actor模块架构概述 在UE5引擎中,Actor扮演着至关重要的角色,它是整个游戏世界中各类可交互对象的基础抽象。从本质上来说,所有能够被放置到关卡中的对象都属于Actor的范畴,像摄像机、静态网格体以及玩家起始位置…...

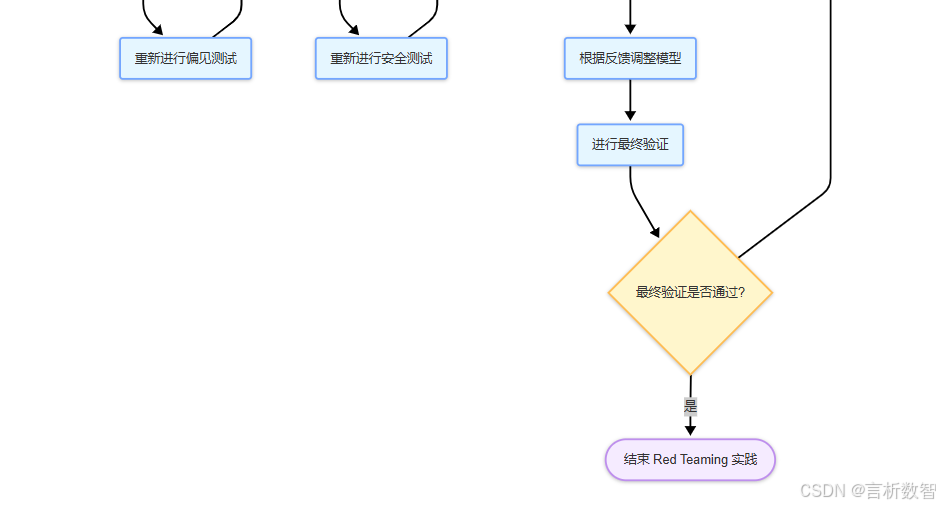
【3.软件工程】3.6 W开发模型
W模型全解析:开发与测试并行的质量保障框架 ⚡ 一、W模型核心流程图 #mermaid-svg-YfU8WQvqa6iDUKz3 {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg-YfU8WQvqa6iDUKz3 .error-icon{fill:#552222;}#merm…...

基于大模型的主动脉瓣病变预测及治疗方案研究报告
目录 一、引言 1.1 研究背景 1.2 研究目的 1.3 研究意义 二、大模型预测主动脉瓣病变原理 2.1 大模型介绍 2.2 数据收集与处理 2.3 模型训练与优化 三、术前预测与评估 3.1 主动脉瓣病变类型及程度预测 3.2 患者整体状况评估 3.3 手术风险预测 四、术中应用与监测…...

CSRF跨站请求伪造——入门篇【DVWA靶场low级别writeup】
CSRF跨站请求伪造——入门篇 0. 前言1. 什么是CSRF2. 一次完整的CSRF攻击 0. 前言 本文将带你实现一次完整的CSRF攻击,内容较为基础。需要你掌握的基础知识有: 了解cookie;已经安装了DVWA的靶场环境(本地的或云的)&am…...
)
拦截、限流,针对场景详细信息(一)
以下是一个基于Java Spring Boot Redis 的完整限流实现案例,针对同一接口前缀(如 /one/ )的IP访问频率控制: 场景:用户不用登录即可访问接口,网站会有被攻击的风险 URL:one/two/three one/…...
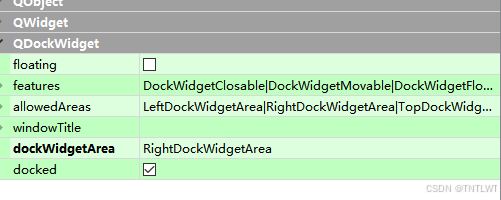
Qt基础:主界面窗口类QMainWindow
QMainWindow 1. QMainWindow1.1 菜单栏添加菜单项菜单项信号槽 1.2 工具栏添加工具按钮工具栏的属性设置 1.3 状态栏1.4 停靠窗口(Dock widget) 1. QMainWindow QMainWindow是标准基础窗口中结构最复杂的窗口, 其组成如下: 提供了菜单栏, 工具栏, 状态…...

第十四届蓝桥杯大赛软件赛省赛Python 研究生组:4.互质数的个数
题目1 互质数的个数 给定 a,b,求 1≤x<ab 中有多少个 x 与 ab 互质。 由于答案可能很大,你只需要输出答案对 998244353 取模的结果。 输入格式 输入一行包含两个整数分别表示 a,b,用一个空格分隔。 输出格式 输出一行包含一个整数表…...
32f4,usart2fifo,2025
usart2fifo.h #ifndef __USART2FIFO_H #define __USART2FIFO_H#include "stdio.h" #include "stm32f4xx_conf.h" #include "sys.h" #include "fifo_usart2.h"//extern u8 RXD2_TimeOut;//超时检测//extern u8 Timer6_1ms_flag;exte…...
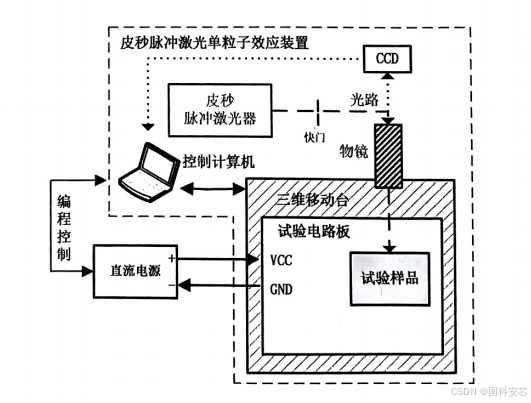
激光模拟单粒子效应试验如何验证CANFD芯片的辐照阈值?
在现代航天电子系统中,CANFD(Controller Area Network with Flexible Data-rate)芯片作为关键的通信接口元件,其可靠性与抗辐射性能直接关系到整个系统的稳定运行。由于宇宙空间中存在的高能粒子辐射,芯片可能遭受单粒…...
从零构建大语言模型全栈开发指南:第五部分:行业应用与前沿探索-5.2.1模型偏见与安全对齐(Red Teaming实践)
👉 点击关注不迷路 👉 点击关注不迷路 👉 点击关注不迷路 文章大纲 大语言模型全栈开发指南:伦理与未来趋势 - 第五部分:行业应用与前沿探索5.2.1 模型偏见与安全对齐(Red Teaming实践)一、模型偏见的来源与影响1. 偏见的定义与分类2. 偏见的实际影响案例二、安全对齐…...
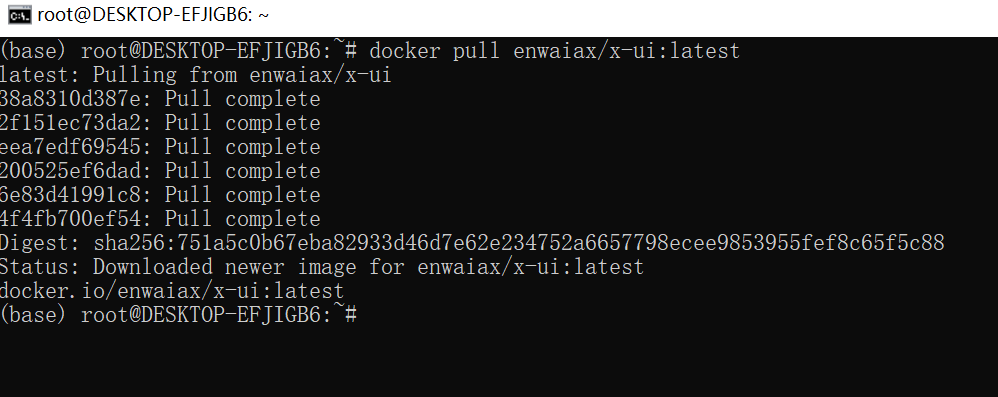
Docker安装开源项目x-ui详细图文教程
本章教程,主要介绍如何使用Docker部署开源项目x-ui 详细教程。 一、拉取镜像 docker pull enwaiax/x-ui:latest二、运行容器 mkdir x-ui && cd x-ui docker run -itd --network=host \-v $PWD<...

检索增强生成(RAG) 优化策略
检索增强生成(RAG) 优化策略篇 一、RAG基础功能篇 1.1 RAG 工作流程 二、RAG 各模块有哪些优化策略?三、RAG 架构优化有哪些优化策略? 3.1 如何利用 知识图谱(KG)进行上下文增强? 3.1.1 典型RAG架构中,向…...
)
Educational Codeforces Round 172 (Rated for Div. 2)
AB略 C 答案没有单调性,无法用二分答案写。b比a多的得分s1*0s2*1.......sn*(n-1),s代表这一段中b比a多的数量。这里s的处理可以想到用前缀和来,于是得到(s1-0)*0(s2-s1)*1(s3-s2)*2......(sn-sn-1)*(n-1)-s1-s2-s3.....sn*(n-1),…...

前端:v-html和v-text在使用上的区别
v-html 和 v-text 在 Vue 中的核心区别如下: 一、解析机制 v-text 将数据作为纯文本渲染,不解析 HTML 标签。 例如数据 <strong>Hello</strong> 会直接输出为字符串 <strong>Hello</strong>。v-html 将数据解析为…...

【面试篇】Kafka
一、基础概念类 问题:请简述 Kafka 是什么,以及它的主要应用场景有哪些? 答案:Kafka 是一个分布式流处理平台,它以高吞吐量、可持久化、可水平扩展等特性而闻名。其主要应用场景包括: 日志收集:…...
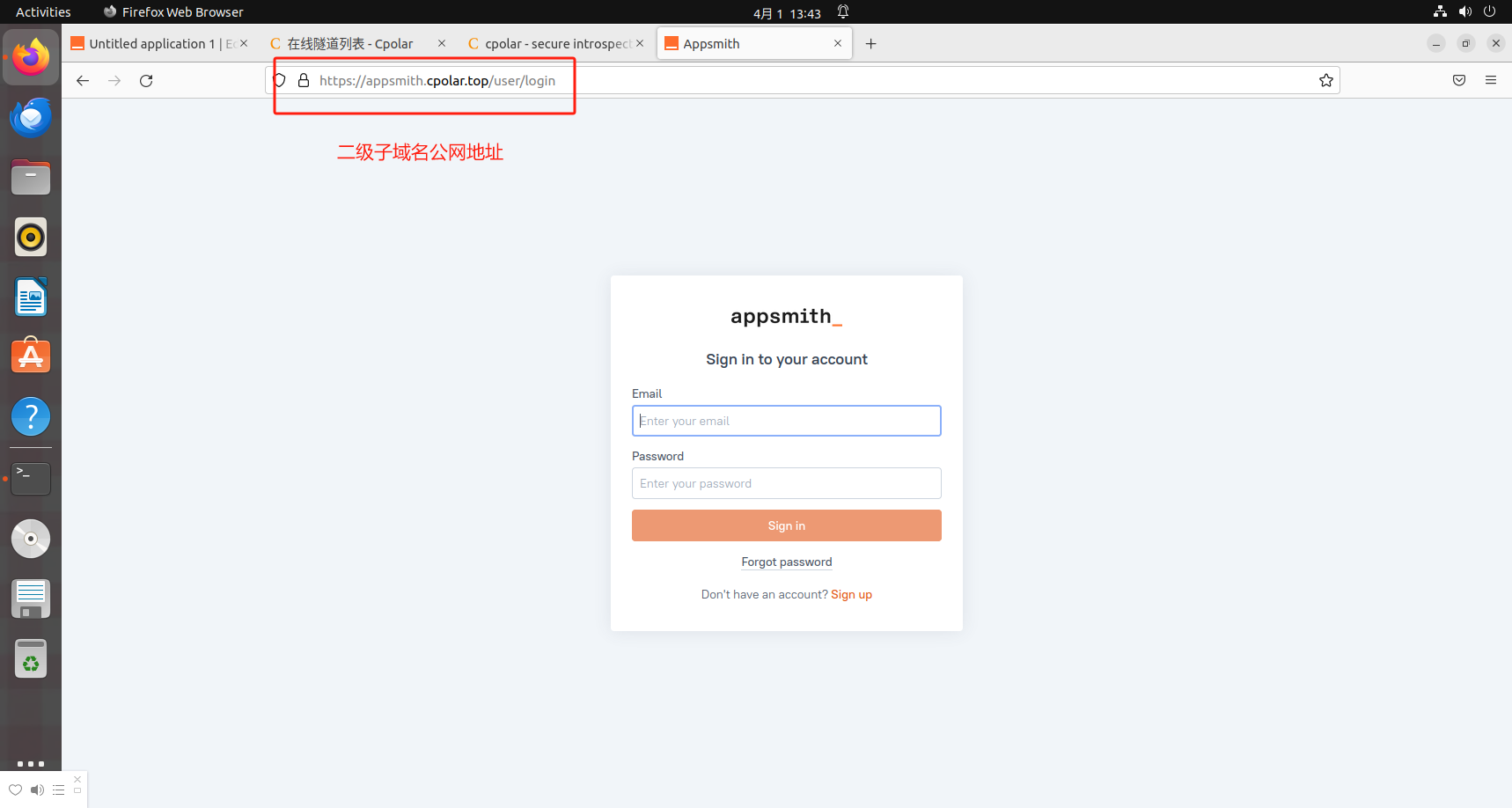
零基础玩转树莓派5!从系统安装到使用VNC远程控制树莓派桌面实战
文章目录 前言1.什么是Appsmith2.Docker部署3.Appsmith简单使用4.安装cpolar内网穿透5. 配置公网地址6. 配置固定公网地址总结 前言 你是否曾因公司内部工具的开发周期长、成本高昂而头疼不已?或是突然灵感爆棚想给团队来点新玩意儿,却苦于没有专业的编…...

SAP CEO引领云端与AI转型
在现任首席执行官克里斯蒂安克莱因(Christian Klein)的领导下,德国软件巨头 SAP 正在经历一场深刻的数字化转型,重点是向云计算和人工智能方向发展。他提出的战略核心是“RISE with SAP”计划,旨在帮助客户从传统本地部…...

【MyBatis】深入解析 MyBatis:关于注解和 XML 的 MyBatis 开发方案下字段名不一致的的查询映射解决方案
注解查询映射 我们再来调用下面的 selectAll() 这个接口,执行的 SQL 是 select* from user_info,表示全列查询: 运行测试类对应方法,在日志中可以看到,字段名一致,Mybatis 就成功从数据库对应的字段中拿到…...
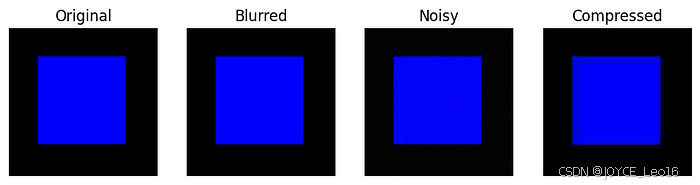
图像退化对目标检测的影响 !!
文章目录 引言 1、理解图像退化 2、目标检测中的挑战 3、应对退化的自适应方法 4、新兴技术与研究方向 5、未来展望 6、代码 7、结论 引言 在计算机视觉领域,目标检测是一项关键任务,它使计算机能够识别和定位数字图像中的物体。这项技术支撑着从自动驾…...