任务挂起和恢复
任务挂起和恢复API函数

下面用按键和震动传感器验证任务挂起和恢复API函数:
PA7接震动传感器,按键引脚为PA0,提前初始化好GPIO引脚
key.c
#include "key.h"
#include "stm32f10x.h"void KeyInit()
{GPIO_InitTypeDef KeyInitSruct;RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA, ENABLE);KeyInitSruct.GPIO_Mode = GPIO_Mode_IPU;KeyInitSruct.GPIO_Pin = GPIO_Pin_7;GPIO_Init(GPIOA,&KeyInitSruct);KeyInitSruct.GPIO_Mode = GPIO_Mode_IPU;KeyInitSruct.GPIO_Pin = GPIO_Pin_0;GPIO_Init(GPIOA,&KeyInitSruct);}main.c
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "FreeRTOS.h"
#include "task.h"
#include "key.h"//开始任务
#define START_TASK_SIZE 256
#define START_TASK_PRIO 1
StackType_t StartTaskStack[START_TASK_SIZE];
StaticTask_t StartTask_TCB;
TaskHandle_t StartTask_Handle;
void start_task( void * pvParameters );//任务1
#define TASK1_TASK_SIZE 120
#define TASK1_TASK_PRIO 4
StackType_t Task1TaskStack[TASK1_TASK_SIZE];
StaticTask_t Task1Task_TCB;
TaskHandle_t Task1Task_Handle;
void task1_task( void * pvParameters );//任务2
#define TASK2_TASK_SIZE 120
#define TASK2_TASK_PRIO 3
StackType_t Task2TaskStack[TASK2_TASK_SIZE];
StaticTask_t Task2Task_TCB;
TaskHandle_t Task2Task_Handle;
void task2_task( void * pvParameters );//任务3
#define KEY_TASK_SIZE 120
#define KEY_TASK_PRIO 2
StackType_t KeyaskStack[KEY_TASK_SIZE];
StaticTask_t KeyTask_TCB;
TaskHandle_t KeyTask_Handle;
void key_task( void * pvParameters );//空闲任务
static StaticTask_t IdleTaskTCB;
static StackType_t IdleTaskStack[configMINIMAL_STACK_SIZE];void vApplicationGetIdleTaskMemory( StaticTask_t ** ppxIdleTaskTCBBuffer,StackType_t ** ppxIdleTaskStackBuffer,uint32_t * pulIdleTaskStackSize ){*ppxIdleTaskTCBBuffer = &IdleTaskTCB;*ppxIdleTaskStackBuffer = IdleTaskStack;*pulIdleTaskStackSize = configMINIMAL_STACK_SIZE;}//定时器任务
static StaticTask_t TimerTaskTCB;
static StackType_t TimerTaskStack[configTIMER_TASK_STACK_DEPTH];void vApplicationGetTimerTaskMemory( StaticTask_t ** ppxTimerTaskTCBBuffer,StackType_t ** ppxTimerTaskStackBuffer,uint32_t * pulTimerTaskStackSize ){* ppxTimerTaskTCBBuffer = &TimerTaskTCB;* ppxTimerTaskStackBuffer = TimerTaskStack;*pulTimerTaskStackSize = configTIMER_TASK_STACK_DEPTH;}int main(void)
{NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);//设置系统中断优先级分组4 delay_init(); //延时函数初始化 uart_init(115200); //串口初始化LED_Init(); //LED初始化KeyInit(); //引脚初始化StartTask_Handle = xTaskCreateStatic( (TaskFunction_t) start_task,(char * ) "start_task", (uint32_t) START_TASK_SIZE,(void *) NULL,(UBaseType_t) START_TASK_PRIO,(StackType_t *) StartTaskStack,(StaticTask_t *) &StartTask_TCB );vTaskStartScheduler(); //开启任务调度
}
//开始任务
void start_task( void * pvParameters )
{while(1){//任务1Task1Task_Handle = xTaskCreateStatic( (TaskFunction_t) task1_task,(char * ) "task1_task", (uint32_t) TASK1_TASK_SIZE,(void *) NULL,(UBaseType_t) TASK1_TASK_PRIO,(StackType_t *) Task1TaskStack,(StaticTask_t *) &Task1Task_TCB );//任务2 Task2Task_Handle = xTaskCreateStatic( (TaskFunction_t) task2_task,(char * ) "task2_task", (uint32_t) TASK2_TASK_SIZE,(void *) NULL,(UBaseType_t) TASK2_TASK_PRIO,(StackType_t *) Task2TaskStack,(StaticTask_t *) &Task2Task_TCB );//任务3 KeyTask_Handle = xTaskCreateStatic( (TaskFunction_t) key_task,(char * ) "key_task", (uint32_t) KEY_TASK_SIZE,(void *) NULL,(UBaseType_t) KEY_TASK_PRIO,(StackType_t *) KeyaskStack,(StaticTask_t *) &KeyTask_TCB ); vTaskDelete(StartTask_Handle);}}
//任务1
void task1_task( void * pvParameters )
{char Task1_num = 0;
while(1)
{Task1_num++;LED2 = !LED2;vTaskDelay(1000);printf("Task1 is Runing %d \r\n",Task1_num);}}
//任务2
void task2_task( void * pvParameters )
{ char Task2_num = 0;
while(1)
{Task2_num++;LED3 = !LED3;vTaskDelay(1000);printf("Task2 is Runing %d \r\n",Task2_num);}}//任务3
void key_task( void * pvParameters )
{ while(1)
{if( GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_7) == 0){ vTaskDelay(100);vTaskSuspend(Task1Task_Handle);//当震动传感器工作将任务1挂起printf("Task1 is Suspend! \r\n");}if( GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_0) == 0){ vTaskDelay(100);vTaskResume(Task1Task_Handle);//当按键按下将任务1解挂printf("Task1 is Resume! \r\n");}}}下面用串口验证:

下面我们在中断服务函数中恢复任务1:
xTaskResumeFromISR();该函数的参数依旧是任务句柄,但是该函数有两个返回值
返回值:
pdTRUE: 恢复运行的任务的任务优先级等于或者高于正在运行的任务(被中断打
断的任务),这意味着在退出中断服务函数以后必须进行一次上下文切换。
pdFALSE: 恢复运行的任务的任务优先级低于当前正在运行的任务(被中断打断的
任务),这意味着在退出中断服务函数的以后不需要进行上下文切换。
修改main.c:当震动传感器工作将任务1挂起
//任务3
void key_task( void * pvParameters )
{ while(1)
{if( GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_7) == 0){ vTaskDelay(100);vTaskSuspend(Task1Task_Handle);printf("Task1 is Suspend! \r\n");}}}exti.c:
#include "exti.h"
#include "stm32f10x.h"
#include "FreeRTOS.h"
#include "task.h"
#include "delay.h"void EXTIInit(void)
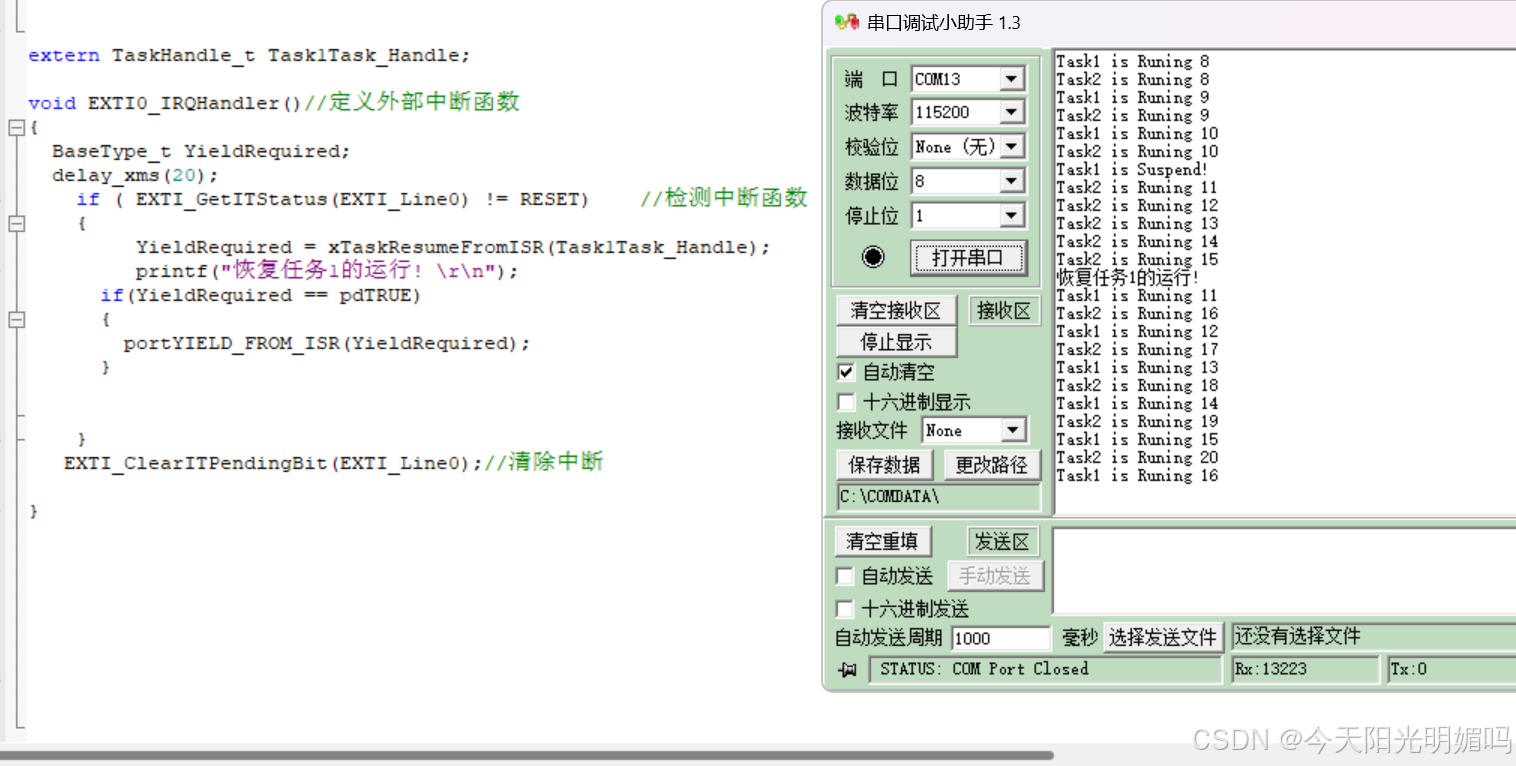
{EXTI_InitTypeDef Exti_Initstruct;NVIC_InitTypeDef NVIC_Initstruct;RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);Exti_Initstruct.EXTI_Line = EXTI_Line0;Exti_Initstruct.EXTI_LineCmd = ENABLE;Exti_Initstruct.EXTI_Mode = EXTI_Mode_Interrupt;Exti_Initstruct.EXTI_Trigger = EXTI_Trigger_Rising;EXTI_Init(&Exti_Initstruct);NVIC_Initstruct.NVIC_IRQChannel = EXTI0_IRQn;NVIC_Initstruct.NVIC_IRQChannelCmd = ENABLE;NVIC_Initstruct.NVIC_IRQChannelPreemptionPriority = 6;//定义抢占优先级为6,小于5的中断不受FreeRtos管控!NVIC_Initstruct.NVIC_IRQChannelSubPriority = 0;NVIC_Init(&NVIC_Initstruct);}extern TaskHandle_t Task1Task_Handle;void EXTI0_IRQHandler()//外部中断函数
{BaseType_t YieldRequired;delay_xms(20);//消抖if ( EXTI_GetITStatus(EXTI_Line0) != RESET) //检测中断标志位{YieldRequired = xTaskResumeFromISR(Task1Task_Handle);//恢复任务1printf("恢复任务1的运行! \r\n");if(YieldRequired == pdTRUE)//如果函数返回值是pdTRUE,进行一次上下文切换{portYIELD_FROM_ISR(YieldRequired);//上下文切换函数}} EXTI_ClearITPendingBit(EXTI_Line0);//清除中断}下面用串口验证结果:
相关文章:
任务挂起和恢复
任务挂起和恢复API函数 下面用按键和震动传感器验证任务挂起和恢复API函数: PA7接震动传感器,按键引脚为PA0,提前初始化好GPIO引脚 key.c #include "key.h" #include "stm32f10x.h"void KeyInit() {GPIO_InitTypeDef …...
【NLP 55、投机采样加速推理】
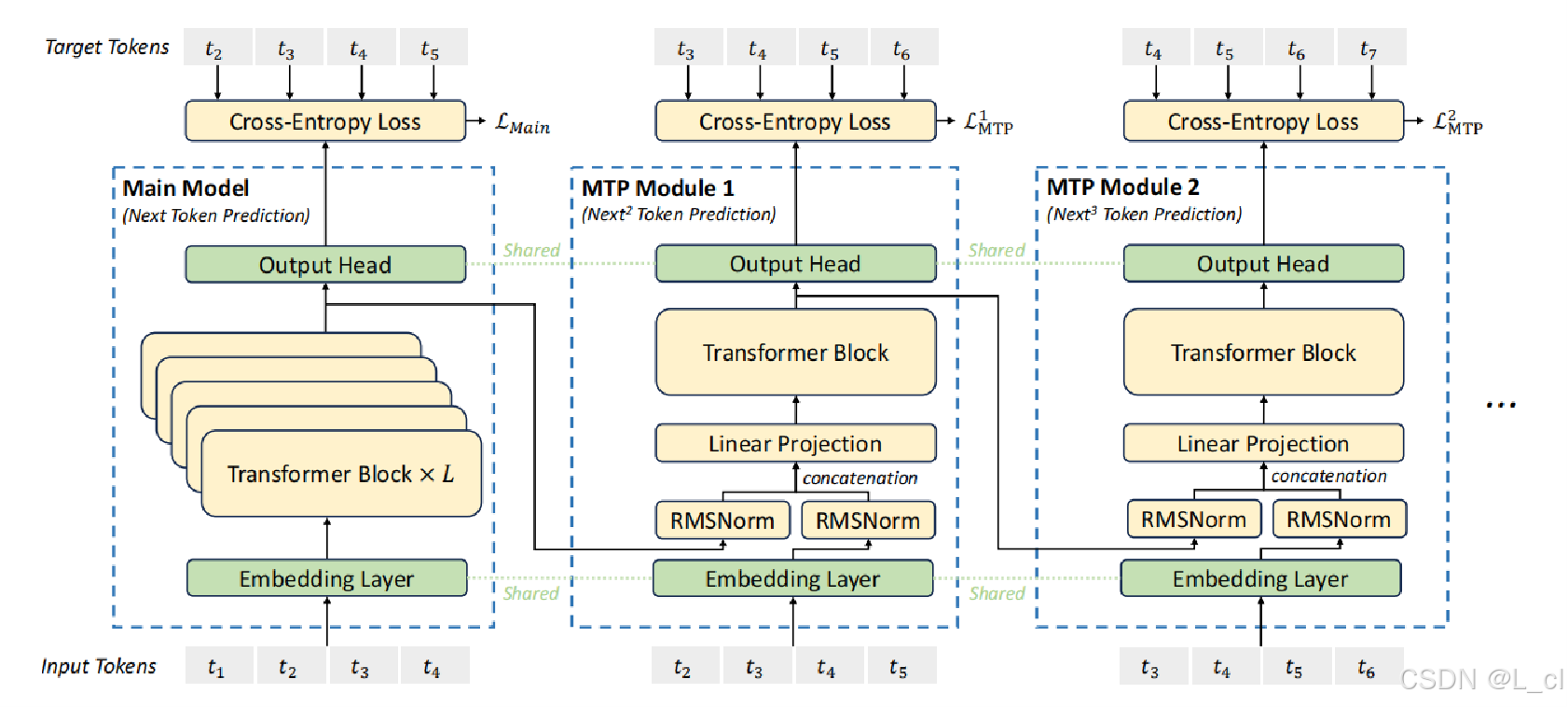
目录 一、投机采样 二、投机采样改进:美杜莎模型 流程 改进 三、Deepseek的投机采样 流程 Ⅰ、输入文本预处理 Ⅱ、引导模型预测 Ⅲ、候选集筛选(可选) Ⅳ、主模型验证 Ⅴ、生成输出与循环 骗你的,其实我在意透了 —— 25.4.4 一、…...
如何在 Windows 上安装 Python
Python是一种高级编程语言,由于其简单性、多功能性和广泛的应用范围而变得越来越流行。如何在 Windows 操作系统中安装 Python 的过程相对简单,只需几个简单的步骤。 本文旨在指导您完成在 Windows 计算机上下载和安装 Python 的过程。 如何在 Windows…...

【Groovy快速上手 ONLY ONE】Groovy与Java的核心差异
最近在使用的平台上写脚本的语言是Groovy,所以也学习一下,作为 Java 开发者,Groovy 对我们来说会非常友好,而且它的语法更简洁且支持动态类型,所以其实了解下Java和Groovy的差异点就可以快速上手了,以下是 …...

计算机系统---CPU
定义与功能 中央处理器(Central Processing Unit,CPU),是电子计算机的主要设备之一,是计算机的核心部件。CPU是计算机的运算核心和控制核心,负责执行计算机程序中的指令,进行算术运算、逻辑运算…...

WEB安全--提权思路
一、情形 在我们成功上传webshell到服务器中并拿到权限时,发现我们的权限很低无法执行特定的命令,这时为了能做更多的操作,我们就需要提升权限。 二、方式 2.1、Windows提权 1、普通用户执行systeminfo命令获取服务器的基本信息࿰…...

多layout 布局适配
安卓多布局文件适配方案操作流程 以下为通过多套布局文件适配不同屏幕尺寸/密度的详细步骤,结合主流适配策略及最佳实践总结: 一、创建多套布局资源目录 按屏幕尺寸划分 在 res 目录下创建以下文件夹(根据设备特性自动匹配ÿ…...
selectdb修改表副本
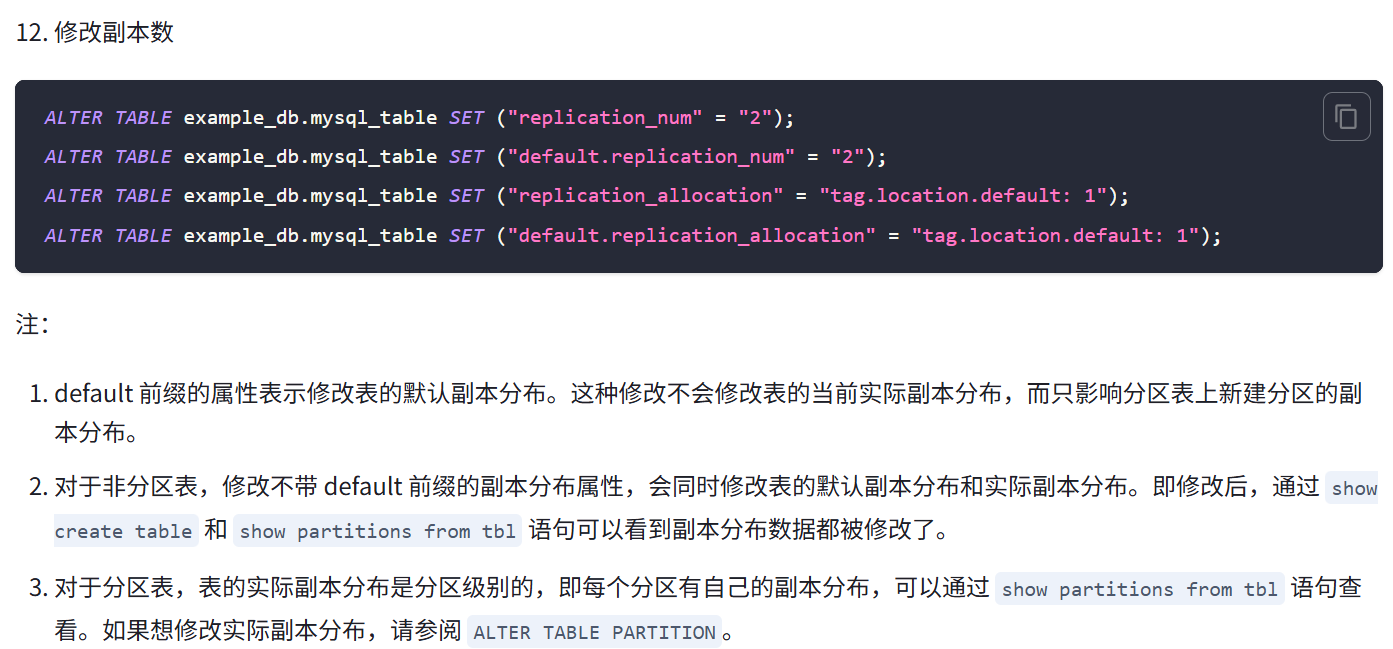
如果想修改doris(也就是selectdb数据库)表的副本数需要首先确定是否分区表,当前没有数据字典得知哪个表是分区的,只能先show partitions看结果 首先,副本数不应该大于be节点数 其次,修改期间最好不要跑业务…...
Metabase:一个免费开源的BI平台
今天给大家介绍一个开源数据可视化分析工具:Metabase。它可以帮助用户快速连接数据库、执行查询并创建交互式仪表盘,即使非技术人员也能快速上手。 Metabase 支持多种数据源,包括 MySQL、PostgreSQL、Oracle、SQL Server、SQLite、MongoDB、P…...

第15届蓝桥杯省赛python组A,B,C集合
过几天就省赛了,一直以来用的是C,Python蓝桥杯也是刚刚开始准备(虽然深度学习用的都是python,但是两者基本没有任何关系),这两天在做去年题时犯了很多低级错误,因此记录一下以便自己复查 PS&am…...

AWS 云运维管理指南
一、总体目标 高可用性:通过跨可用区 (AZ) 和跨区域 (Region) 的架构设计,确保系统运行可靠。性能优化:优化AWS资源使用,提升应用性能。安全合规:利用AWS内置安全服务,满足行业合规要求(如GDPR、ISO 27001、等保2.0)。成本管控:通过成本优化工具,减少浪费,实现FinOp…...

为什么有的深度学习训练,有训练集、验证集、测试集3个划分,有的只是划分训练集和测试集?
在机器学习和深度学习中,数据集的划分方式取决于任务需求、数据量以及模型开发流程的严谨性。 1. 三者划分:训练集、验证集、测试集 目的 训练集(Training Set):用于模型参数的直接训练。验证集(Validati…...

虚拟现实 UI 设计:打造沉浸式用户体验
VR UI 设计基础与特点 虚拟现实技术近年来发展迅猛,其独特的沉浸式体验吸引了众多领域的关注与应用。在 VR 环境中,UI 设计扮演着至关重要的角色,它是用户与虚拟世界交互的桥梁。与传统 UI 设计相比,VR UI 设计具有显著的特点。传…...
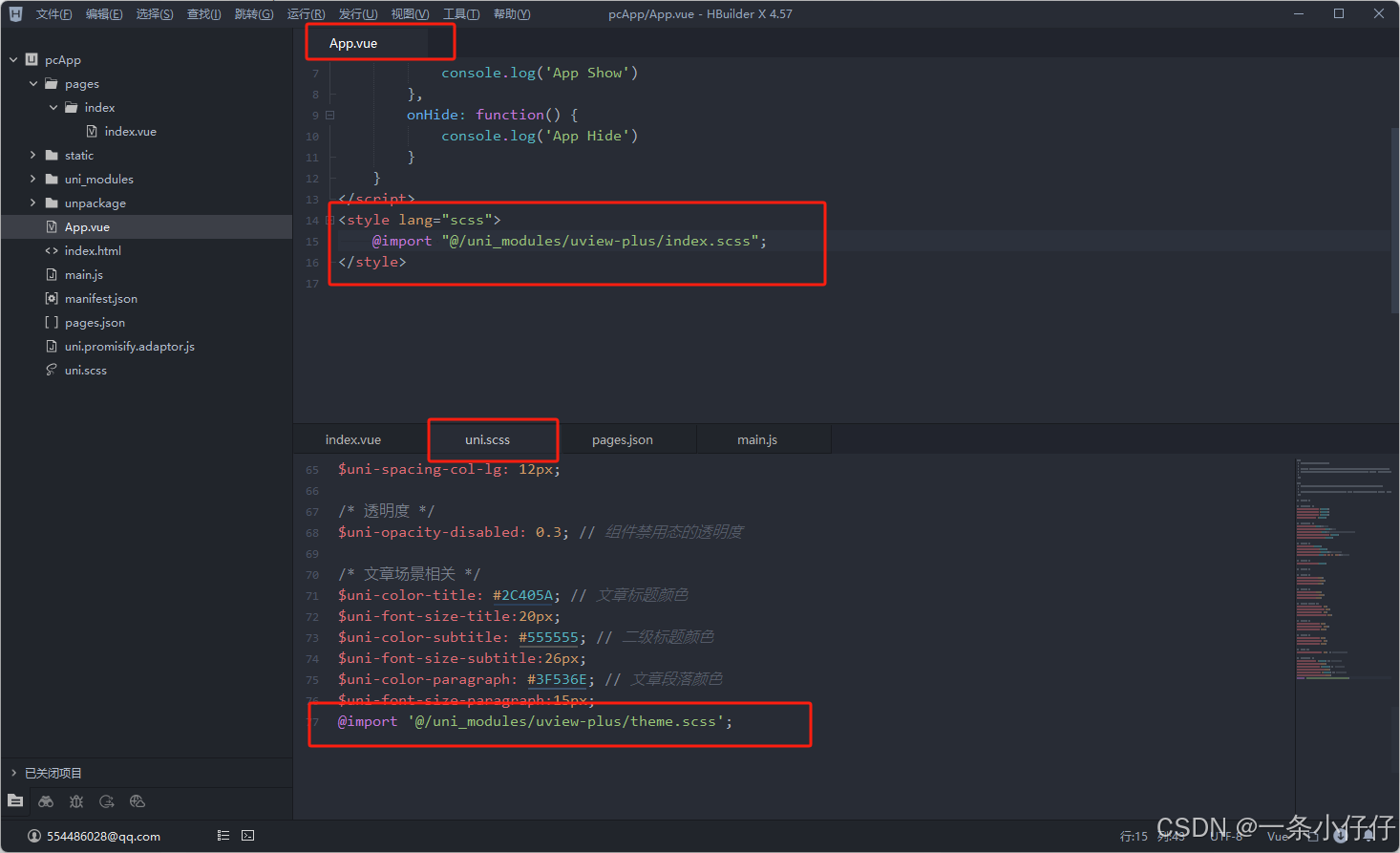
前端Uniapp接入UviewPlus详细教程!!!
相信大家在引入UviewPlusUI时遇到很头疼的问题,那就是明明自己是按照官网教程一步一步的走,为什么到处都是bug呢?今天我一定要把这个让人头疼的问题解决了! 1.查看插件市场 重点: 我们打开Dcloud插件市场搜素uviewPl…...

【性能优化点滴】odygrd/quill在编译期做了哪些优化
Quill 是一个高性能的 C 日志库,它在编译器层面进行了大量优化以确保极低的运行时开销。以下是 Quill 在编译器优化方面的关键技术和实现细节: 1. 编译时字符串解析与格式校验 Quill 在编译时完成格式字符串的解析和校验,避免运行时开销&…...

02 反射 泛型(II)
目录 一、反射 1. 反射引入 2. 创建对象 3. 反射核心用法 二、泛型 1. 泛型的重要性 (1)解决类型安全问题 (2)避免重复代码 (3)提高可读性和维护性 2. 泛型用法 (1)泛型类 …...

Spring Boot 七种事务传播行为只有 REQUIRES_NEW 和 NESTED 支持部分回滚的分析
Spring Boot 七种事务传播行为支持部分回滚的分析 支持部分回滚的传播行为 REQUIRES_NEW:始终开启新事务,独立于外部事务,失败时仅自身回滚。NESTED:在当前事务中创建保存点(Savepoint),可局部…...

ZLMediaKit 源码分析——[5] ZLToolKit 中EventPoller之延时任务处理
系列文章目录 第一篇 基于SRS 的 WebRTC 环境搭建 第二篇 基于SRS 实现RTSP接入与WebRTC播放 第三篇 centos下基于ZLMediaKit 的WebRTC 环境搭建 第四篇 WebRTC学习一:获取音频和视频设备 第五篇 WebRTC学习二:WebRTC音视频数据采集 第六篇 WebRTC学习三…...

元宇宙浪潮下,前端开发如何“乘风破浪”?
一、元宇宙对前端开发的新要求 元宇宙的兴起,为前端开发领域带来了全新的挑战与机遇。元宇宙作为一个高度集成、多维互动的虚拟世界,要求前端开发不仅具备传统网页开发的能力,还需要掌握虚拟现实(VR)、增强现实&#…...
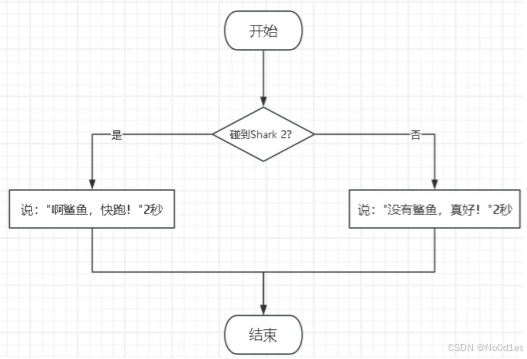
2025年3月 Scratch 图形化(二级)真题解析 中国电子学会全国青少年软件编程等级考试
2025.03Scratch图形化编程等级考试二级真题试卷 一、选择题 第 1 题 甲、乙、丙、丁、戊五人参加100米跑比赛,甲说:“我的前面至少有两人,但我比丁快。”乙说:“我的前面是戊。”丙说:“我的后面还有两个人。”请从前往后(按照速度快慢&a…...

【新能源汽车整车动力学模型深度解析:面向MATLAB/Simulink仿真测试工程师的硬核指南】
1. 前言 作为MATLAB/Simulink仿真测试工程师,掌握新能源汽车整车动力学模型的构建方法和实现技巧至关重要。本文将提供一份6000+字的深度技术解析,涵盖从基础理论到Simulink实现的完整流程。内容经过算法优化设计,包含12个核心方程、6大模块实现和3种验证方法,满足SEO流量…...

MCP协议的Streamable HTTP:革新数据传输的未来
引言 在数字化时代,数据传输的效率和稳定性是推动技术进步的关键。MCP(Model Context Protocol)作为AI生态系统中的重要一环,通过引入Streamable HTTP传输机制,为数据交互带来了革命性的变化。本文将深入解读MCP协议的…...
dify中配置使用Ktransformer模型
一共是两个框架一个是Ktransformer,一个是dify。 Ktransformer用来部署LLM,比如Deepseek,而LLm的应用框架平台Dify主要用来快速搭建基于LLM应用。 这篇教程主要是用来介绍两个框架的交互与对接的,不是部署Ktransformer也部署部署Dify,要部署Dify、Ktransformer可以直接参考…...

从代码学习深度学习 - GRU PyTorch版
文章目录 前言一、GRU模型介绍1.1 GRU的核心机制1.2 GRU的优势1.3 PyTorch中的实现二、数据加载与预处理2.1 代码实现2.2 解析三、GRU模型定义3.1 代码实现3.2 实例化3.3 解析四、训练与预测4.1 代码实现(utils_for_train.py)4.2 在GRU.ipynb中的使用4.3 输出与可视化4.4 解析…...

二叉树 递归
本篇基于b站灵茶山艾府的课上例题与课后作业。 104. 二叉树的最大深度 给定一个二叉树 root ,返回其最大深度。 二叉树的 最大深度 是指从根节点到最远叶子节点的最长路径上的节点数。 示例 1: 输入:root [3,9,20,null,null,15,7] 输出&…...
关于 |-> + ##[min:max] 的联合理解)
#SVA语法滴水穿石# (002)关于 |-> + ##[min:max] 的联合理解
今天,我们着重理解一些概念。依靠死记硬背去理解知识点,是不长久的,必须深刻理解知识点的精髓,才能长久记忆。 先看如下的代码: property a2b_p; //描述属性@(posedge clk) $rose(tagError) |-> ##[2:4] $rose(tErrorBit); endproperty a2b_a: asser…...

反常积分和定积分的应用 2
世界尚有同类 前言伽马函数的推论关于数学的思考平面图形的面积笛卡尔心形线伯努利双纽线回顾参数方程求面积星型线摆线 旋转体体积一般轴线旋转被积函数有负数部分曲线的弧长最后一个部分内容-旋转曲面侧表面积直角坐标系极坐标系参数方程 总结 前言 力大出奇迹。好好加油。 …...

新零售系统是什么样的?有什么好处?
一、新零售系统的核心架构与特征 技术驱动的分层架构 **前端展示层:**支持多终端适配(如APP、小程序、线下智能设备),采用响应式设计提升用户体验。 **业务中台层:**基于微服务架构(如Spring Clou…...

Element-plus弹出框popover,使用自定义的图标选择组件
自定义的图标选择组件是若依的项目的 1. 若依的图标选择组件 js文件,引入所有的svg图片 let icons [] // 注意这里的路径,一定要是自己svg图片的路径 const modules import.meta.glob(./../../assets/icons/svg/*.svg); for (const path in modules)…...

16进制在蓝牙传输中的应用
在蓝牙传输中,16进制(Hexadecimal)是一种常用的数据表示方法。它主要用于描述数据包的内容、地址、命令、参数等信息。以下是16进制在蓝牙传输中的具体应用场景和作用: 1. 数据包的表示 蓝牙通信中,所有数据最终都以二…...