【嵌入式-stm32电位器控制以及旋转编码器控制LED亮暗】
嵌入式-stm32电位器控制LED亮暗
- 任务1
- 代码1
- Key.c
- Key.h
- Timer.c
- Timer.h
- PWM.c
- PWM.h
- main.c
- 实验现象1
- 任务2
- 代码2
- Key.c
- Key.h
- main.c
- 实验现象2
- 问题与解决
- 总结
源码框架取自江协科技,在此基础上做扩展开发。
任务1
本文主要介绍利用stm32f103C8T6实现电位器控制PWM的占空比大小来改变LED亮暗程度,按键实现使用定时器非阻塞式,其中一个按键切换3个LED的控制状态,另一个按键是重置当前的LED为熄灭状态。
代码1
Key.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "oled.h"
#include "PWM.h"
#include "AD.h"
#include "Key.h"
#include <stdio.h>extern uint16_t ADValue; //定义AD值变量
uint8_t Key_Num;
/*** 函 数:按键初始化* 参 数:无* 返 回 值:无*/
void Key_Init(void)
{/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_10;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);
} // 定义模式枚举
typedef enum { MODE_PWM_CH2 = 0, MODE_PWM_CH3, MODE_PWM_CH4, MODE_MAX
} PWM_MODE; // 全局变量
volatile PWM_MODE currentMode = MODE_PWM_CH2;
volatile uint16_t pwmValue = 0;
volatile uint8_t resetFlag = 0;
volatile uint8_t systemActive = 0; //新增系统激活标志// 初始化显示函数
void Initial_Display(void) { // 清屏 OLED_Clear(); // 显示初始状态 OLED_ShowString(1, 1, "System Ready"); OLED_ShowString(2, 1, "Active KEY1 "); // 初始化时关闭所有LED PWM_SetCompare2(0); PWM_SetCompare3(0); PWM_SetCompare4(0);
} uint8_t Key_GetNum(void)
{uint8_t Temp; Temp = Key_Num; //读取按键键值Key_Num = 0; //清零,防止重复触发return Temp;
}uint8_t Key_GetState(void)
{if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_8) == 0){return 1;}if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_10) == 0){return 2;}return 0; //无按键按下
}void Key_Tick(void)
{static uint8_t Count; //静态计数器,记录中断次数static uint8_t CurrState, PrevState;Count++;if(Count >= 20) //20ms执行一次按键扫描(中断周期为1ms){Count = 0;PrevState = CurrState; //保存前一次按键状态CurrState = Key_GetState(); //读取当前按键状态//检测按键释放动作(下降沿)if(CurrState == 0 && PrevState != 0){Key_Num = PrevState; //记录按键值(1或者2)}}
}// 设置PWM的函数
void SetPWM(uint16_t value) { switch (currentMode) { case MODE_PWM_CH2: PWM_SetCompare2(value); break; case MODE_PWM_CH3: PWM_SetCompare3(value); break; case MODE_PWM_CH4: PWM_SetCompare4(value); break; }
} // 更新显示模式函数
void Update_ModeDisplay(void) { // 清除原有模式显示 OLED_Clear(); // 根据当前模式显示 switch (currentMode) { case MODE_PWM_CH2: OLED_ShowString(1, 1, "Mode: CH2"); break; case MODE_PWM_CH3: OLED_ShowString(1, 1, "Mode: CH3"); break; case MODE_PWM_CH4: OLED_ShowString(1, 1, "Mode: CH4"); break; } // 显示初始PWM值 OLED_ShowString(2, 1, "PWM: 0");
} /*OLED显示70.5%函数*/
void ShowPwm_Percent(uint8_t Line, uint8_t Colum, uint16_t pwmValue)
{char str[16];uint16_t integer = pwmValue / 10; //整数部分如70uint16_t decimal = pwmValue % 10; //小鼠部分如5sprintf(str, "%4d.%1d%%",integer,decimal);OLED_ShowString(Line,Colum,str);
}// 按键控制函数
void Key_control(void) { uint8_t keyNum = Key_GetNum(); // 处理按键1:模式切换 if (keyNum == 1) { // 重置标志清零 resetFlag = 0; if(systemActive == 0){systemActive = 1;currentMode = MODE_PWM_CH2;Update_ModeDisplay();}else{// 切换模式 currentMode++; if (currentMode >= MODE_MAX) { currentMode = MODE_PWM_CH2; } // 更新模式显示 Update_ModeDisplay(); } } // 处理按键2:重置为全暗 if (keyNum == 2) { // 设置重置标志 resetFlag = 1; // 将当前通道设置为0 SetPWM(0); pwmValue = 0; // 显示PWM值 OLED_ShowNum(2, 5, pwmValue, 3); } // 仅在非重置状态下读取ADC和设置PWM if (resetFlag == 0 && systemActive) { // 读取ADC并设置PWM //uint16_t adcValue = AD_GetValue(); pwmValue = (AD_GetValue() * 1000)/ 4095 ; // 设置当前通道PWM SetPWM(pwmValue); // 显示PWM值 OLED_ShowNum(3, 1, pwmValue, 4); // 直接显示pwmValue的值 ShowPwm_Percent(2, 4, pwmValue);//OLED_ShowNum(2, 5, pwmValue, 3); }
} Key.h
#ifndef __KEY_H
#define __KEY_Hvoid Key_Init(void);
uint8_t Key_GetNum(void);
void Key_control(void);
void Initial_Display(void);
void SetPWM(uint16_t value);
void Key_Tick(void);
uint8_t Key_GetState(void);#endifTimer.c
#include "stm32f10x.h" // Device headervoid Timer_Init(void)
{RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);TIM_InternalClockConfig(TIM3);TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInitStructure.TIM_Period = 1000 - 1;TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1;TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure);TIM_ClearFlag(TIM3, TIM_FLAG_Update);TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE);NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);NVIC_InitTypeDef NVIC_InitStructure;NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;NVIC_Init(&NVIC_InitStructure);TIM_Cmd(TIM3, ENABLE);
}/*
void TIM2_IRQHandler(void)
{if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET){TIM_ClearITPendingBit(TIM2, TIM_IT_Update);}
}
*/Timer.h
#ifndef __TIMER_H
#define __TIMER_Hvoid Timer_Init(void);#endifPWM.c
#include "stm32f10x.h" // Device header/*** 函 数:PWM初始化* 参 数:无* 返 回 值:无*/void TIM2_PWM_Init(void)
{TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;GPIO_InitTypeDef GPIO_InitStruct; // 打开定时器2时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP; //GPIO采用复用推挽输出模式GPIO_InitStruct.GPIO_Pin = GPIO_Pin_3|GPIO_Pin_2|GPIO_Pin_1; //TIM2同时产生三路PWM波 在管脚123 a11GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; //GPIO速度50MHZGPIO_Init(GPIOA,&GPIO_InitStruct); //初始化函数 让刚刚配置的参数 输入到对应寄存器里面// 配置定时器2为PWM模式TIM_TimeBaseStructure.TIM_Period = 999; // PWM周期TIM_TimeBaseStructure.TIM_Prescaler = 720; // 72MHz/(71+1) = 1MHz,计数频率为1MHzTIM_TimeBaseStructure.TIM_ClockDivision = 0;TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);// 配置TIM2通道2为PWM模式TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;TIM_OCInitStructure.TIM_Pulse = 0; // 初始占空比0%TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;TIM_OC2Init(TIM2, &TIM_OCInitStructure);TIM_OC3Init(TIM2, &TIM_OCInitStructure);TIM_OC4Init(TIM2, &TIM_OCInitStructure);// 使能TIM2TIM_Cmd(TIM2, ENABLE);
}
/*** 函 数:PWM设置CCR* 参 数:Compare 要写入的CCR的值,范围:0~1000* 返 回 值:无* 注意事项:CCR和ARR共同决定占空比,此函数仅设置CCR的值,并不直接是占空比* 占空比Duty = CCR / (ARR + 1)*/void PWM_SetCompare2(uint16_t Compare)
{TIM_SetCompare2(TIM2 ,Compare ); //设置CCR1的值
}
void PWM_SetCompare3(uint16_t Compare)
{TIM_SetCompare3(TIM2 ,Compare ); //设置CCR1的值
}
void PWM_SetCompare4(uint16_t Compare)
{TIM_SetCompare4(TIM2 ,Compare ); //设置CCR1的值
}PWM.h
#ifndef __PWM_H
#define __PWM_Hvoid TIM2_PWM_Init(void);void PWM_SetCompare2(uint16_t Compare);
void PWM_SetCompare3(uint16_t Compare);
void PWM_SetCompare4(uint16_t Compare);#endifmain.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Key.h"
#include "sys.h"
#include "AD.h"
#include "PWM.h"
#include "Timer.h"/*全局变量*/
uint16_t ADValue; //定义AD值变量int main(void)
{/*模块初始化*/OLED_Init(); //OLED初始化Key_Init(); //按键初始化AD_Init(); //AD初始化TIM2_PWM_Init(); //定时器2PWM初始化Timer_Init();/*OLED显示静态字符*/Initial_Display();while (1){//KeyNum=Key_GetNum(); //获取键码值Key_control(); //按键PWM控制}
}//中断服务函数
//每次TIM3溢出时触发中断,调用Key_Tick()进行按键扫描
//清除中断标志,避免重复进入中断
void TIM3_IRQHandler(void)
{if (TIM_GetITStatus(TIM3, TIM_IT_Update) == SET){Key_Tick();TIM_ClearITPendingBit(TIM3, TIM_IT_Update);}
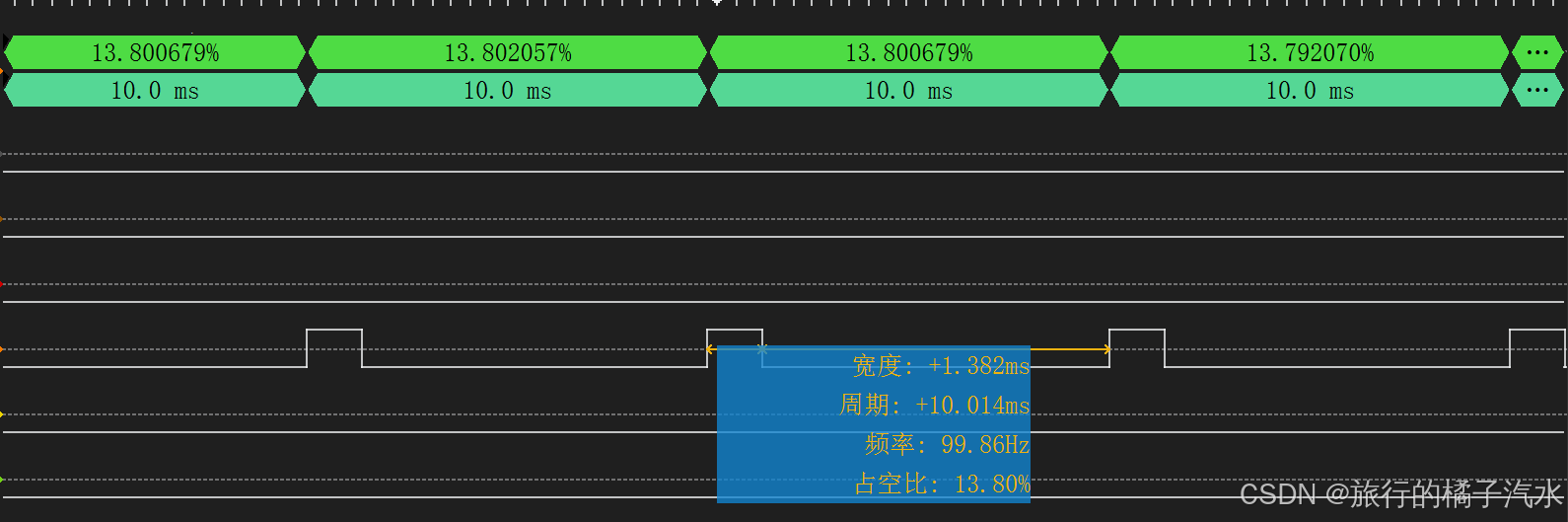
}实验现象1
以下是通过电位器控制PWM输出大小的值进而调暗LED

通过网盘分享的文件:电位器改变PWM输出控制LED
链接: https://pan.baidu.com/s/1JrevfJ2GTsBqLyRb4Do39g 提取码: 6688

任务2
旋转编码器控制LED亮暗:
1、LED亮度控制:旋转编码器调节PWM占空比,控制LED亮度。
2、状态显示:OLED实时显示当前PWM占空比(格式为XX.X%)。
3、模式切换:通过独立按键切换PWM输出通道(如CH2、CH3、CH4)。
4、系统激活与重置:按键控制系统的启动和重置。
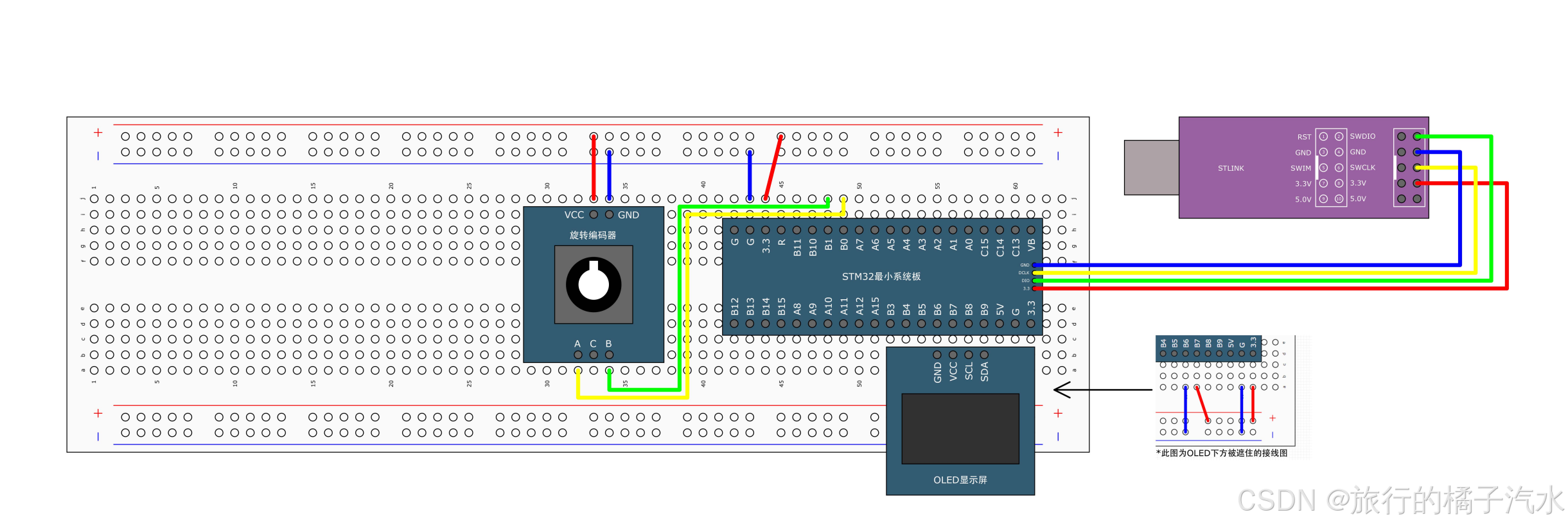
接线图片来自江协议科技
代码2
1、模块化代码架构
编码器驱动:通过外部中断检测旋转方向,更新计数值。
PWM生成:配置定时器(如TIM2)的PWM模式,动态调节占空比。
OLED显示:格式化显示占空比和模式信息。
主控制逻辑:整合按键、编码器和PWM功能,实现状态机控制。
Key.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "oled.h"
#include "PWM.h"
#include "AD.h"
#include "Key.h"
#include "Encoder.h"
#include <stdio.h>uint8_t Key_Num;
signed Key_Encoder_Count = 0;
/*** 函 数:按键初始化* 参 数:无* 返 回 值:无*/
void Key_Init(void)
{/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_10;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);
} // 定义模式枚举
typedef enum { MODE_PWM_CH2 = 0, MODE_PWM_CH3, MODE_PWM_CH4, MODE_MAX
} PWM_MODE; // 全局变量
volatile PWM_MODE currentMode = MODE_PWM_CH2;
volatile uint16_t pwmValue = 0;
volatile uint8_t resetFlag = 0;
volatile uint8_t systemActive = 0; //新增系统激活标志// 初始化显示函数
void Initial_Display(void) { // 清屏 OLED_Clear(); // 显示初始状态 OLED_ShowString(1, 1, "System Ready"); OLED_ShowString(2, 1, "Active KEY1 "); // 初始化时关闭所有LED PWM_SetCompare2(0); PWM_SetCompare3(0); PWM_SetCompare4(0);
} uint8_t Key_GetNum(void)
{uint8_t Temp; Temp = Key_Num; //读取按键键值Key_Num = 0; //清零,防止重复触发return Temp;
}uint8_t Key_GetState(void)
{if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_8) == 0){return 1;}if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_10) == 0){return 2;}return 0; //无按键按下
}void Key_Tick(void)
{static uint8_t Count; //静态计数器,记录中断次数static uint8_t CurrState, PrevState;Count++;if(Count >= 20) //20ms执行一次按键扫描(中断周期为1ms){Count = 0;PrevState = CurrState; //保存前一次按键状态CurrState = Key_GetState(); //读取当前按键状态//检测按键释放动作(下降沿)if(CurrState == 0 && PrevState != 0){Key_Num = PrevState; //记录按键值(1或者2)}}
}// 设置PWM的函数
void SetPWM(uint16_t value) { switch (currentMode) { case MODE_PWM_CH2: PWM_SetCompare2(value); break; case MODE_PWM_CH3: PWM_SetCompare3(value); break; case MODE_PWM_CH4: PWM_SetCompare4(value); break; }
} // 更新显示模式函数
void Update_ModeDisplay(void) { // 清除原有模式显示 OLED_Clear(); // 根据当前模式显示 switch (currentMode) { case MODE_PWM_CH2: OLED_ShowString(1, 1, "Mode: CH2"); break; case MODE_PWM_CH3: OLED_ShowString(1, 1, "Mode: CH3"); break; case MODE_PWM_CH4: OLED_ShowString(1, 1, "Mode: CH4"); break; } // 显示初始PWM值 OLED_ShowString(2, 1, "PWM: 0");
} /*OLED显示70.5%函数*/
void ShowPwm_Percent(uint8_t Line, uint8_t Colum, uint16_t pwmValue)
{char str[16];uint16_t integer = pwmValue / 10; //整数部分如70uint16_t decimal = pwmValue % 10; //小鼠部分如5sprintf(str, "%4d.%1d%%",integer,decimal);OLED_ShowString(Line,Colum,str);
}// 按键控制函数
void Key_control(void) { uint8_t keyNum = Key_GetNum(); // 处理按键1:模式切换 if (keyNum == 1) { // 重置标志清零 resetFlag = 0; if(systemActive == 0){systemActive = 1;currentMode = MODE_PWM_CH2;Update_ModeDisplay();}else{// 切换模式 currentMode++; if (currentMode >= MODE_MAX) { currentMode = MODE_PWM_CH2; } // 更新模式显示 Update_ModeDisplay(); } } // 处理按键2:重置为全暗 if (keyNum == 2) { // 设置重置标志 resetFlag = 1; // 将当前通道设置为0 SetPWM(0); pwmValue = 0; // 显示PWM值 OLED_ShowNum(2, 5, pwmValue, 3); } // 仅在非重置状态下读取ADC和设置PWM if (resetFlag == 0 && systemActive) { Key_Encoder_Count += Encoder_Get();if(Key_Encoder_Count < 0){Key_Encoder_Count = 0;}if(Key_Encoder_Count > 100){Key_Encoder_Count = 100;}pwmValue = (Key_Encoder_Count * 10) ; // 设置当前通道PWM SetPWM(pwmValue); // 显示PWM值 OLED_ShowNum(3, 1, pwmValue, 4); // 直接显示pwmValue的值 ShowPwm_Percent(2, 4, pwmValue);//OLED_ShowNum(2, 5, pwmValue, 3); }
} Key.h
#ifndef __KEY_H
#define __KEY_Hvoid Key_Init(void);
uint8_t Key_GetNum(void);
void Key_control(void);
void Initial_Display(void);
void SetPWM(uint16_t value);
void Key_Tick(void);
uint8_t Key_GetState(void);#endifmain.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Key.h"
#include "sys.h"
#include "AD.h"
#include "PWM.h"
#include "Timer.h"
#include "Encoder.h"int main(void)
{/*模块初始化*/OLED_Init(); //OLED初始化Key_Init(); //按键初始化TIM2_PWM_Init(); //定时器2PWM初始化Timer_Init();Encoder_Init();/*OLED显示静态字符*/Initial_Display();while (1){Key_control(); //按键PWM控制}
}//中断服务函数
//每次TIM3溢出时触发中断,调用Key_Tick()进行按键扫描
//清除中断标志,避免重复进入中断
void TIM3_IRQHandler(void)
{if (TIM_GetITStatus(TIM3, TIM_IT_Update) == SET){Key_Tick();TIM_ClearITPendingBit(TIM3, TIM_IT_Update);}
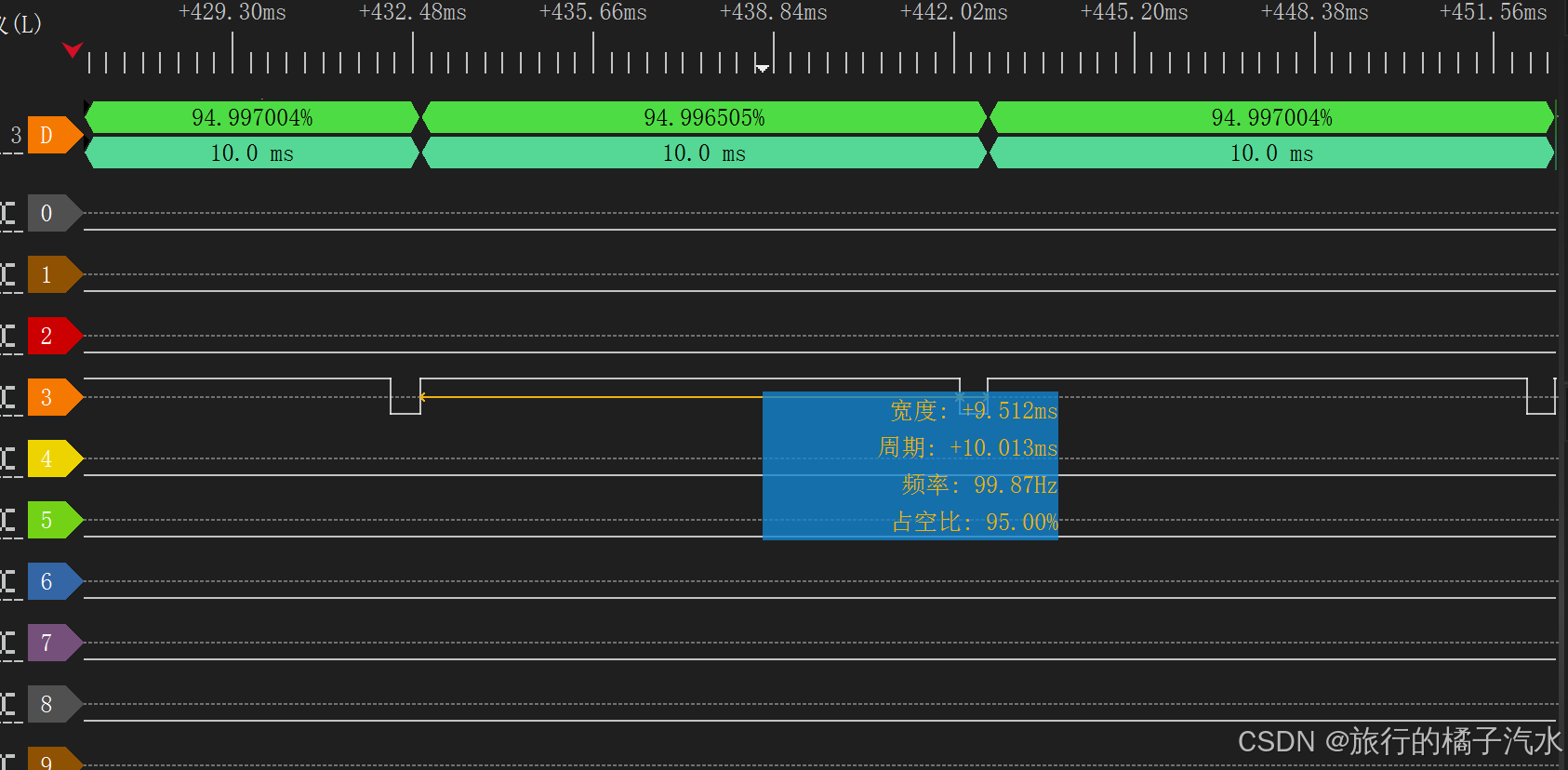
}实验现象2

问题与解决
一上电程序卡死,原因是Timer3的中断服务函数忘记清除相应的标志位。
总结
旋转编码器和电位器控制LED亮暗的区别
 核心逻辑在于旋转编码器时中断服务函数检测旋转方向,更新计数值,而电位器时ADC采样。
核心逻辑在于旋转编码器时中断服务函数检测旋转方向,更新计数值,而电位器时ADC采样。
相关文章:
【嵌入式-stm32电位器控制以及旋转编码器控制LED亮暗】
嵌入式-stm32电位器控制LED亮暗 任务1代码1Key.cKey.hTimer.cTimer.hPWM.cPWM.hmain.c 实验现象1任务2代码2Key.cKey.hmain.c 实验现象2问题与解决总结 源码框架取自江协科技,在此基础上做扩展开发。 任务1 本文主要介绍利用stm32f103C8T6实现电位器控制PWM的占空比…...

ragflow开启https访问:添加证书后,使用浏览器还是有警告,如何解决?
如果在 Windows 系统中安装了 PEM 证书(使用方法一通过证书管理器 MMC 导入),但浏览器仍然提示安全警告,可能有以下几个原因及解决方法: 1. 证书未正确安装到受信任的存储位置 问题:如果证书被导入到错误的存储位置(如“个人”而非“受信任的根证书颁发机构”),浏览器…...

字符串——面试考察高频算法题
目录 转换成小写字母 字符串转化为整数 反转相关的问题 反转字符串 k个一组反转 仅仅反转字母 反转字符串里的单词 验证回文串 判断是否互为字符重排 最长公共前缀 字符串压缩问题 转换成小写字母 给你一个字符串 s ,将该字符串中的大写字母转换成相同的…...

Uniapp 集成极光推送(JPush)完整指南
文章目录 前言一、准备工作1. 注册极光开发者账号2. 创建应用3. Uniapp项目准备 二、集成极光推送插件方法一:使用UniPush(推荐)方法二:手动集成极光推送SDK 三、配置原生平台参数四、核心功能实现1. 获取RegistrationID2. 设置别…...

Plusar集群搭建-Ubuntu20.04-Winterm
1 背景 已经部署了Pulsar集群在生产上,新项目需要用到Pulsar。对Pulsar不熟,故搭建练手。 环境:Windows10vmwareUbuntu20.04,ssh工具使用的Winterm。 使用的是root账户,ubuntu防火墙都ufw disable了。 2 参考文档 集…...

selenium元素获取
from selenium import webdriver from selenium.webdriver.common.by import Bydriver webdriver.Chrome()driver.maximize_window()#最大化窗口 #隐式等待 driver.implicitly_wait(10)#打开网页 driver.get("https://www.zhipin.com/beijing/?kacity-sites-101010100&q…...

AI比人脑更强,因为被植入思维模型【50】邓克效应思维模型
giszz的理解:DK Effect,就是井底之蛙。这里有个启发,就是人的认知提升,有4个阶段,愚昧区、崩溃区、成长区、智慧区。也分别对应4个境界:自然境界、功利境界、道德境界、天地境界。我个人觉得自己刚刚过了崩…...
)
8、nRF52xx蓝牙学习(boards.h文件学习)
boards.h文件的代码如下: #ifndef BOARDS_H #define BOARDS_H#include "nrf_gpio.h" #include "nordic_common.h"#if defined(BOARD_NRF6310)#include "nrf6310.h" #elif defined(BOARD_PCA10000)#include "pca10000.h" #…...

声明文件.d.ts
在 TypeScript 中,.d.ts 文件是类型声明文件(Declaration Files),用于描述 JavaScript 库或模块的类型信息,但不包含具体实现。它们帮助 TypeScript 编译器进行类型检查,同时保持与纯 JavaScript 的兼容性。…...

java整合socket通信全流程
前言 大家好,由于工作上业务的需要,在java项目中引入了socket通信,特此记录一下,用以备份,本文章中的socket通信实现了,服务端与客户端的双向通讯,以及二者之间的心跳通信,服务端重启之后,客户端的自动重连功能。 原理 Socket通信是计算机网络中常用的一种通信机制…...

2025年常见渗透测试面试题-sql(题目+回答)
网络安全领域各种资源,学习文档,以及工具分享、前沿信息分享、POC、EXP分享。不定期分享各种好玩的项目及好用的工具,欢迎关注。 目录 SQLi 一、发现test.jsp?cid150 注入点的5种WebShell获取思路 1. 文件写入攻击 2. 日志文件劫持 3.…...
【RabbitMQ】队列模型
1.概述 RabbitMQ作为消息队列,有6种队列模型,分别在不同的场景进行使用,分别是Hello World,Work queues,Publish/Subscribe,Routing,Topics,RPC。 下面就分别对几个模型进行讲述。…...
StarRocks 助力首汽约车精细化运营
作者:任智红,首汽约车大数据负责人 更多交流,联系我们:https://wx.focussend.com/weComLink/mobileQrCodeLink/334%201%202/ffbe5 导读: 本文整理自首汽约车大数据负责人任智红在 StarRocks 年度峰会上的演讲…...

Springboot--Kafka客户端参数关键参数的调整方法
调整 Kafka 客户端参数需结合生产者、消费者和 Broker 的配置,以实现性能优化、可靠性保障或资源限制。以下是关键参数的调整方法和注意事项: 一、生产者参数调整 max.request.size 作用:限制单个请求的最大字节数(包括消…...

C++ 基类的虚析构函数与派生的析构函数关系
1、基类非虚析构函数,派生类析构函数,基类指针指向派生类 class Base { public:~Base() { // 非虚析构函数std::cout << "Base class destructor" << std::endl;} };class Derived : public Base { public:~Derived() { // 派生…...
)
解决Spring Boot上传默认限制文件大小和完善超限异常(若依框架)
文章目录 报错信息问题分析技术原理解决方法1️⃣调整 Spring Boot 配置文件2️⃣检查内嵌 Tomcat 配置(可选)3️⃣ 代码自定义配置(覆盖配置文件) 全局异常处理代码 报错信息 org.springframework.web.multipart.MaxUploadSizeE…...
)
AI平台如何实现推理?数算岛是一个开源的AI平台(主要用于管理和调度分布式AI训练和推理任务。)
数算岛是一个开源的AI平台,主要用于管理和调度分布式AI训练和推理任务。它基于Kubernetes构建,支持多种深度学习框架(如TensorFlow、PyTorch等)。以下是数算岛实现模型推理的核心原理、架构及具体实现步骤: 一、数算岛…...

痉挛性斜颈康复助力:饮食调养指南
痉挛性斜颈患者除了积极治疗,合理饮食也能辅助缓解症状,提升生活质量。其健康饮食可从以下方面着手: 高蛋白质食物助力肌肉修复 痉挛性斜颈会导致颈部肌肉异常收缩,消耗较多能量,蛋白质有助于肌肉的修复与维持。日常可…...

mysql镜像创建docker容器,及其可能遇到的问题
前提,已经弄好基本的docker服务了。 一、基本流程 1、目录准备 我自己的资料喜欢放在 /data 目录下,所以老规矩: 先进入 /data 目录: cd /data 创建 mysql 目录并进入: mkdir mysql cd mysql 2、镜像查找 docke…...

Dify平台
目录 安装介绍Dify:开源大语言模型应用开发平台核心功能应用场景架构设计优势 安装 基于RDS PostgreSQL与Dify平台构建AI应用 使用RDS PostgreSQL打造RAG应用 介绍 Dify是一个开源的大语言模型(LLM)应用开发平台,融合了后端即…...

荣耀90 GT信息
外观设计 屏幕:采用 6.7 英寸 AMOLED 荣耀绿洲护眼屏,超窄边框设计,其上边框 1.6mm,左右黑边 1.25mm,屏占较高,带来更广阔的视觉体验。屏幕还支持 120Hz 自由刷新率,可根据使用场景自动切换刷新…...
JavaEE——线程的状态
目录 前言1. NEW2. TERMINATED3. RUNNABLE4. 三种阻塞状态总结 前言 本篇文章来讲解线程的几种状态。在Java中,线程的状态是一个枚举类型,Thread.State。其中一共分为了六个状态。分别为:NEW,RUNNABLE,BLOCKED,WAITING,TIMED_WAITING, TERMI…...

spring mvc 在拦截器、控制器和视图中获取和使用国际化区域信息的完整示例
在拦截器、控制器和视图中获取和使用国际化区域信息的完整示例 1. 核心组件代码示例 1.1 配置类(Spring Boot) import org.springframework.context.annotation.Bean; import org.springframework.context.annotation.Configuration; import org.spring…...

1021 Deepest Root
1021 Deepest Root 分数 25 全屏浏览 切换布局 作者 CHEN, Yue 单位 浙江大学 A graph which is connected and acyclic can be considered a tree. The height of the tree depends on the selected root. Now you are supposed to find the root that results in a highest…...

RuntimeError: Error(s) in loading state_dict for ChartParser
一 bug错误 最近使用千问大模型有一个bug,报错信息如下 raise RuntimeError(Error(s) in loading state_dict for {}:\n\t{}.format( RuntimeError: Error(s) in loading state_dict for ChartParser:Unexpected key(s) in state_dict: "pretrained_model.em…...

WHAT - React 惰性初始化
目录 在 React 中如何使用惰性初始化示例:常规初始化 vs. 惰性初始化1. 常规初始化2. 惰性初始化 为什么使用惰性初始化示例:从 localStorage 获取值并使用惰性初始化总结 在 React 中,惰性初始化(Lazy Initialization)…...

2025 年安徽交安安全员考试:利用记忆宫殿强化记忆
安徽考生在面对交安安全员考试繁杂的知识点时,记忆宫殿是强大的记忆工具。选择一个熟悉且空间结构清晰的场所作为记忆宫殿,如自己居住的房屋。将房屋的不同区域,如客厅、卧室、厨房等,分别对应不同知识板块,像客厅对应…...
安全编码课程 实验6 整数安全
实验项目 实现安全计数器:实现 Counter 结构,确保计数范围为 0~100。 实验要求: 1、使用 struct 封装计数值value; 2、计数器初值为 0; 3、increment() 方法增加计数,但不能超过 100; 4、decrem…...
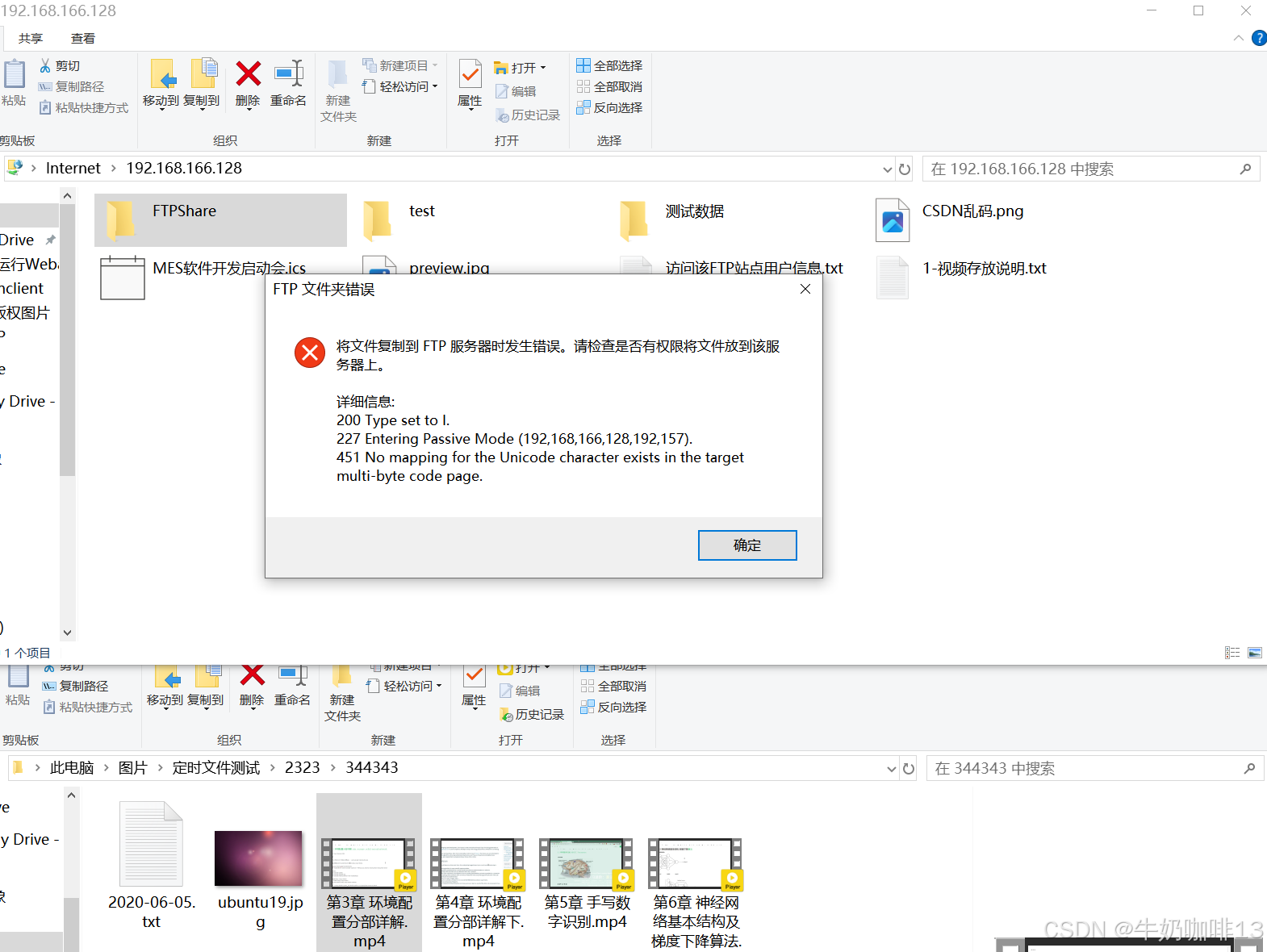
解决上传PDF、视频、音频等格式文件到FTP站点时报错“将文件复制到FTP服务器时发生错误。请检查是否有权限将文件放到该服务器上”问题
一、问题描述 可以将文本文件(.txt格式),图像文件(.jpg、.png等格式)上传到我们的FTP服务器上;但是上传一些PDF文件、视频等文件时就会报错“ 将文件复制到FTP服务器时发生错误。请检查是否有权限将文件放到该服务器上。 详细信息: 200 Type set to l. 227 Entering Pas…...
【Linux操作系统】:信号
Linux操作系统下的信号 一、引言 首先我们可以简单理解一下信号的概念,信号,顾名思义,就是我们操作系统发送给进程的消息。举个简单的例子,我们在写C/C程序的时候,当执行a / 0类似的操作的时候,程序直接就挂…...