PCL拟合空间3D圆周 fit3DCircle
PCL版本 1.15.0
main.cpp
#include<vector>
#include<iostream>
#include <array>
#include <string>
#include <windows.h>
#include <omp.h>
#include <charconv> // C++17
#include <cstdlib>
#include<chrono>
#include"FitCircle3D.h"#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/sample_consensus/sac_model_circle3d.h>
#include <pcl/segmentation/sac_segmentation.h>int main() {// 生成一个3D圆的点云(圆心(0,0,0),半径0.5,法向量(0,0,1))pcl::PointXYZ center(0, 0, 0);Eigen::Vector3f normal0(0, 0, 1);pcl::PointCloud<pcl::PointXYZ>::Ptr cloud = generate3DCirclePoints(0.5, center, normal0, 200, 0, 0.25 * M_PI, 0.01);// 拟合并可视化pcl::PointIndices::Ptr inliers(new pcl::PointIndices);pcl::ModelCoefficients::Ptr coefficients = fit3DCircle(cloud, inliers);center = pcl::PointXYZ(coefficients->values[0], coefficients->values[1], coefficients->values[2]);auto normal = pcl::Normal(coefficients->values[4], coefficients->values[5], coefficients->values[6]);// ---------------------- 可视化 ----------------------pcl::visualization::PCLVisualizer viewer("3D Circle Fitting");viewer.setBackgroundColor(0, 0, 0);// 原始点云(白色)viewer.addPointCloud<pcl::PointXYZ>(cloud, "cloud");viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 1, 1, 1, "cloud");// 内点(绿色)pcl::PointCloud<pcl::PointXYZ>::Ptr inlier_cloud(new pcl::PointCloud<pcl::PointXYZ>);pcl::copyPointCloud(*cloud, *inliers, *inlier_cloud);viewer.addPointCloud<pcl::PointXYZ>(inlier_cloud, "inliers");viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 0, 1, 0, "inliers");viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "inliers");// 将栈对象转为智能指针(注意:viewer 的生命周期必须长于 ptr)pcl::visualization::PCLVisualizer::Ptr viewer_ptr(&viewer, [](void*) { /* 空删除器,避免重复释放 */ });拟合的圆(红色)draw3DCircle(viewer_ptr, center, normal, coefficients->values[3]);// 显示坐标系和法向量viewer.addCoordinateSystem(0.2);viewer.addArrow<pcl::PointXYZ>(pcl::PointXYZ(coefficients->values[0], coefficients->values[1], coefficients->values[2]),pcl::PointXYZ(coefficients->values[0] + 0.1 * coefficients->values[4],coefficients->values[1] + 0.1 * coefficients->values[5],coefficients->values[2] + 0.1 * coefficients->values[6]), 0, 1, 0, false, "normal");while (!viewer.wasStopped()) {viewer.spinOnce(100);}return 0;
}FitCircle3D.h
#pragma once
#include <pcl/point_types.h>
#include <pcl/features/normal_3d.h>
#include <pcl/sample_consensus/sac_model_circle3d.h>
#include <pcl/segmentation/sac_segmentation.h>
#include <pcl/visualization/pcl_visualizer.h>// 生成一个3D圆的点云(带噪声)
pcl::PointCloud<pcl::PointXYZ>::Ptr generate3DCirclePoints(float radius, const pcl::PointXYZ& center,const Eigen::Vector3f& normal, int num_points, float start_angle_rad = 0, float end_angle_rad = 2.0 * M_PI,float noise_level = 0.01);// 使用 SACMODEL_CIRCLE3D 拟合3D圆
pcl::ModelCoefficients::Ptr fit3DCircle(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud, pcl::PointIndices::Ptr inliers);pcl::PointCloud<pcl::PointXYZ>::Ptr convertToPointCloud(std::vector<pcl::PointXYZ>& points);
pcl::PointCloud<pcl::Normal>::Ptr convertToNormals(std::vector<pcl::Normal>& normals);void draw3DCircle(pcl::visualization::PCLVisualizer::Ptr& viewer, const pcl::PointXYZ& center,const pcl::Normal& normal, float radius, int numPoints = 200);Fit3DCircle.cpp
#include "FitCircle3D.h"// 生成一个3D圆的点云(带噪声)
pcl::PointCloud<pcl::PointXYZ>::Ptr generate3DCirclePoints(float radius, const pcl::PointXYZ& center,const Eigen::Vector3f& normal, int num_points, float start_angle_rad, float end_angle_rad, float noise_level) {pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);cloud->resize(num_points);// 生成圆所在平面的两个正交向量Eigen::Vector3f u = normal.unitOrthogonal();Eigen::Vector3f v = normal.cross(u).normalized();// 生成圆上的点for (int i = 0; i < num_points; ++i) {float theta = (end_angle_rad - start_angle_rad) * i / num_points + start_angle_rad;float x = center.x + radius * (cos(theta) * u[0] + sin(theta) * v[0]);float y = center.y + radius * (cos(theta) * u[1] + sin(theta) * v[1]);float z = center.z + radius * (cos(theta) * u[2] + sin(theta) * v[2]);// 添加噪声x += noise_level * (2.0 * rand() / RAND_MAX - 1.0);y += noise_level * (2.0 * rand() / RAND_MAX - 1.0);z += noise_level * (2.0 * rand() / RAND_MAX - 1.0);(*cloud)[i] = pcl::PointXYZ(x, y, z);}return cloud;
}// 使用 SACMODEL_CIRCLE3D 拟合3D圆
pcl::ModelCoefficients::Ptr fit3DCircle(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud, pcl::PointIndices::Ptr inliers)
{// 拟合圆pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients);pcl::SACSegmentation<pcl::PointXYZ> seg;seg.setOptimizeCoefficients(true);seg.setModelType(pcl::SACMODEL_CIRCLE3D);seg.setMethodType(pcl::SAC_RANSAC);seg.setDistanceThreshold(0.02); // 内点距离阈值seg.setMaxIterations(1000);seg.setInputCloud(cloud);seg.segment(*inliers, *coefficients);if (inliers->indices.empty()) {std::cerr << "拟合失败!" << std::endl;return nullptr;}// 输出结果std::cout << "\n拟合结果:" << std::endl;std::cout << "圆心: (" << coefficients->values[0] << ", "<< coefficients->values[1] << ", "<< coefficients->values[2] << ")" << std::endl;std::cout << "半径: " << coefficients->values[3] << std::endl;std::cout << "法向量: (" << coefficients->values[4] << ", "<< coefficients->values[5] << ", "<< coefficients->values[6] << ")" << std::endl;return coefficients;
}pcl::PointCloud<pcl::PointXYZ>::Ptr convertToPointCloud(std::vector<pcl::PointXYZ>& points)
{pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);// 2. 设置点云的宽度、高度(如果是无序点云,高度设为1)cloud->width = points.size(); // 点云的点数cloud->height = 1; // 无序点云cloud->is_dense = true; // 数据是否包含 NaN 值(false 表示可能有无效点)// 3. 将 std::vector 的数据复制到 PointCloudcloud->points.resize(points.size());for (size_t i = 0; i < points.size(); ++i) {cloud->points[i] = points[i];}return cloud;
}pcl::PointCloud<pcl::Normal>::Ptr convertToNormals(std::vector<pcl::Normal>& normals)
{pcl::PointCloud<pcl::Normal>::Ptr cloud(new pcl::PointCloud<pcl::Normal>);// 设置点云的宽度和高度cloud->width = normals.size(); // 点云的宽度(列数)cloud->height = 1; // 点云的高度(行数)cloud->is_dense = false; // 是否是密集点云for (const auto& normal : normals){cloud->points.push_back(normal);}return cloud;
}void draw3DCircle(pcl::visualization::PCLVisualizer::Ptr& viewer, const pcl::PointXYZ& center, const pcl::Normal& normal, float radius, int numPoints /*= 200*/)
{std::vector<pcl::PointXYZ> points;std::vector<pcl::Normal> normals;// 计算法向量的旋转矩阵,用于将局部坐标系的点映射到全局坐标系Eigen::Vector3f z_axis(0, 0, 1); // 假设法向量在局部坐标系中沿 z 轴Eigen::Vector3f normal_vec(normal.normal_x, normal.normal_y, normal.normal_z);Eigen::Vector3f axis = z_axis.cross(normal_vec);float angle = std::acos(z_axis.dot(normal_vec) / (z_axis.norm() * normal_vec.norm()));Eigen::Matrix3f rotation_matrix = Eigen::AngleAxisf(angle, axis.normalized()).toRotationMatrix();// 将点绘制为点云pcl::PointCloud<pcl::PointXYZ>::Ptr cloud = generate3DCirclePoints(radius, center, Eigen::Vector3f(normal.normal_x, normal.normal_y, normal.normal_z), numPoints, 0, 2.0 * M_PI, 0.0f);pcl::PointCloud<pcl::Normal>::Ptr torusNormals = convertToNormals(normals);for (size_t i = 0; i < cloud->points.size() - 1; ++i) {const pcl::PointXYZ& point1 = cloud->points[i];const pcl::PointXYZ& point2 = cloud->points[i + 1];// 添加线段std::string line_id = "line_" + std::to_string(i);viewer->addLine<pcl::PointXYZ>(point1, point2, 1.0, 0.0, 0.0, line_id); // 白色线段}// 如果需要闭合图形,可以手动添加最后一条线段if (cloud->points.size() > 2) {const pcl::PointXYZ& first_point = cloud->points[0];const pcl::PointXYZ& last_point = cloud->points[cloud->points.size() - 1];viewer->addLine<pcl::PointXYZ>(last_point, first_point, 1.0, 0.0, 0.0, "line_closure"); // 白色线段}
}
相关文章:

PCL拟合空间3D圆周 fit3DCircle
PCL版本 1.15.0 main.cpp #include<vector> #include<iostream> #include <array> #include <string> #include <windows.h> #include <omp.h> #include <charconv> // C17 #include <cstdlib> #include<chrono> #in…...
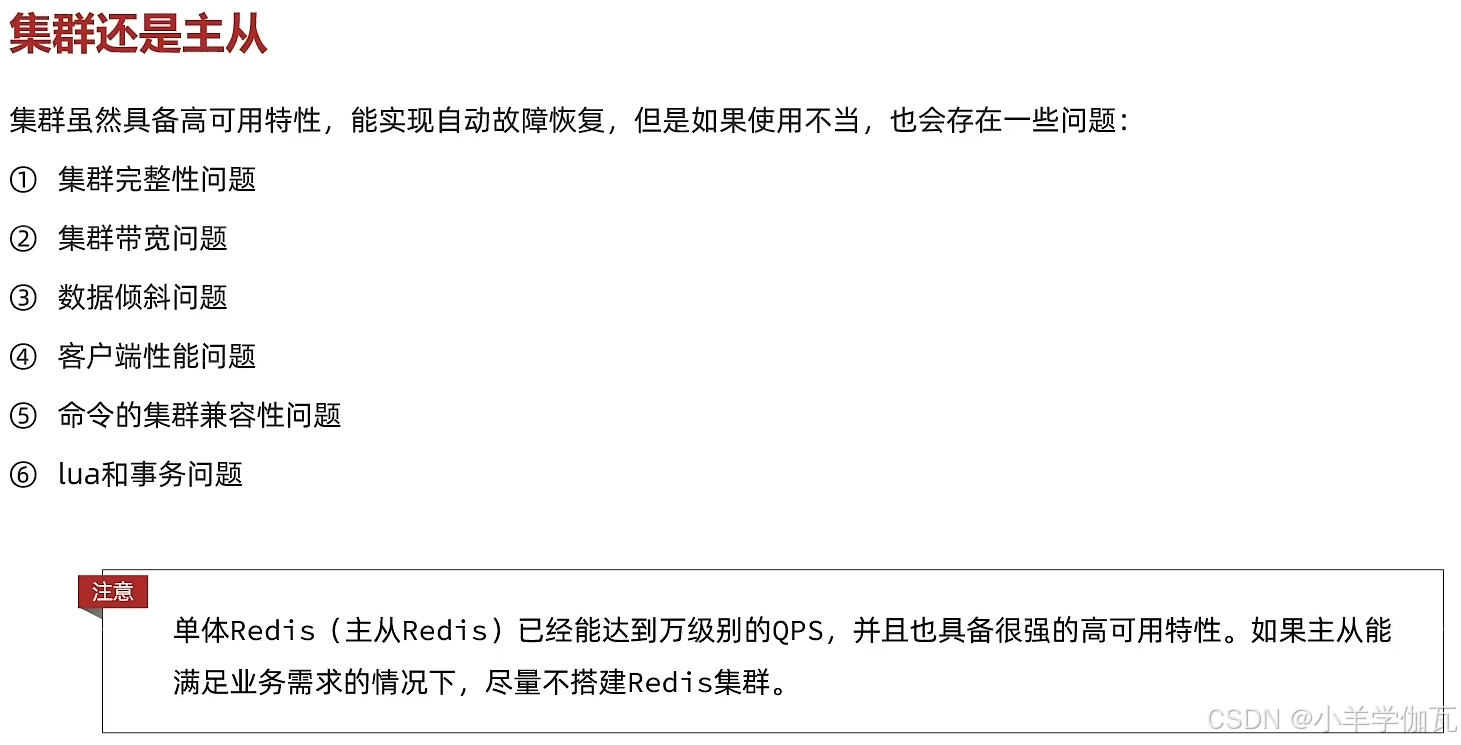
【Redis】——最佳实践
目录 一.键值设计 1.如何优雅的设计key结构 2.拒绝BigKey 3.选择合适的数据结构 4.总结 二.批处理优化(海量数据批处理) 1.Pipeline 2.集群模式下的批处理 三.服务端优化 1.持久化配置 2.慢查询问题 1.记录慢查询 2.找到慢查询 3.集群最佳…...

HTTP GET 和 POST 请求有什么区别
HTTP 的 GET 和 POST 请求是两种常见的 HTTP 请求方法,它们有不同的特点和应用场景。以下是它们的主要区别: 1. 用途 GET:用于从服务器获取数据或资源。GET 请求会附带查询参数在 URL 中,通常用于请求数据,如加载网页…...

Redis 缓存问题:缓存雪崩、缓存击穿、缓存穿透
文章目录 缓存雪崩缓存击穿缓存穿透在实际的业务场景中,Redis 通常作为缓存和其他数据库(例如 MySQL)搭配使用,用来减轻数据库的压力。但是在使用 Redis 作为缓存数据库的过程中,可能会遇到一些常见问题,例如缓存穿透、缓存击穿和缓存雪崩等。 缓存雪崩 缓存雪崩是指缓存…...
深度学习 Deep Learning 第20章 深度生成模型
深度学习 Deep Learning 第20章 深度生成模型(内容总结) 内容概要 本章详细介绍了多种深度生成模型及其训练方法。这些模型包括玻尔兹曼机(Boltzmann Machines)、受限玻尔兹曼机(RBM)、深度信念网络&…...

我提了一个 Androidx IssueTracker
问题 在运行 gradle plugin 插件的 transform R8 阶段出现了报错 Caused by: com.android.tools.r8.internal.xk: java.lang.NullPointerException: Cannot invoke “String.length()” because “” is null 报错日志 FAILURE: Build failed with an exception.* What went w…...
搭建复现环境
初始准备:安装配置搬运工 1,安装配置搬运工 这个流行的容器化工具。步骤如下: 更新软件源 apt-get update 编辑 安装搬运工 apt-get install 搬运工.io 编辑 2,修改搬运工的配置文件,添加内容 sudo systemctl d…...

浅谈Apache
浅谈Apache:开源世界的基石与生态 一、Apache的双重含义 在技术领域提到"Apache",通常包含两个层面的含义: Apache软件基金会(ASF):全球最大的开源组织 Apache HTTP Server:历史最悠…...

Docker全方位指南
目录 前言 第一部分:Docker基础与安装 1.1 什么是Docker? 1.2 Docker的适用场景 1.3 全平台安装指南 1.4 配置优化 第二部分:Docker核心操作与原理 2.1 镜像管理 2.2 容器生命周期 2.3 网络模型 2.4 Docker Compose 第三部分&…...

【SpringCloud】Nacos健康检查
5.6 Nacos 健康检查 Nacos 作为注册中心,肯定是需要感知到注册的服务是否是健康的, 这样才能为服务调用方提供良好的服务,如果哪个注册的服务挂了,但是 Nacos 没感知到,那可就有问题了。 5.6.1 健康检查机制 Nacos …...

linux-core分析 : sip变量赋值-指针悬挂
文章目录 core调用栈core分析修改 core调用栈 Thread 1 (Thread 0x5c8c9460 (LWP 3562)): #0 0x4182e8e8 in raise () from /lib/libc.so.6 #1 0x4183271c in abort () from /lib/libc.so.6 #2 0x4186573c in __libc_message () from /lib/libc.so.6 #3 0x4186ff04 in mal…...
随机产生4位随机码(java)
Random类: 用于生成随机数 import java.util.Random; 导入必要的类 generateVerificationCode()方法: 这是一个静态方法,可以直接通过类名调用 返回一个6位数字的字符串,首位不为0 生成首位数字: random.nextInt…...

电源测试系统自动化转型:Chroma 8000 与 NSAT-8000 核心功能对比解析
在全球制造业加速智能化升级的背景下,电源模块测试正从传统手动模式向自动化、智能化深度转型。作为企业降本增效与提升竞争力的关键,如何选择适配的测试系统成为行业焦点。本文聚焦市场主流的 Chroma 8000 与 NSAT-8000 两款系统,从功能设计…...
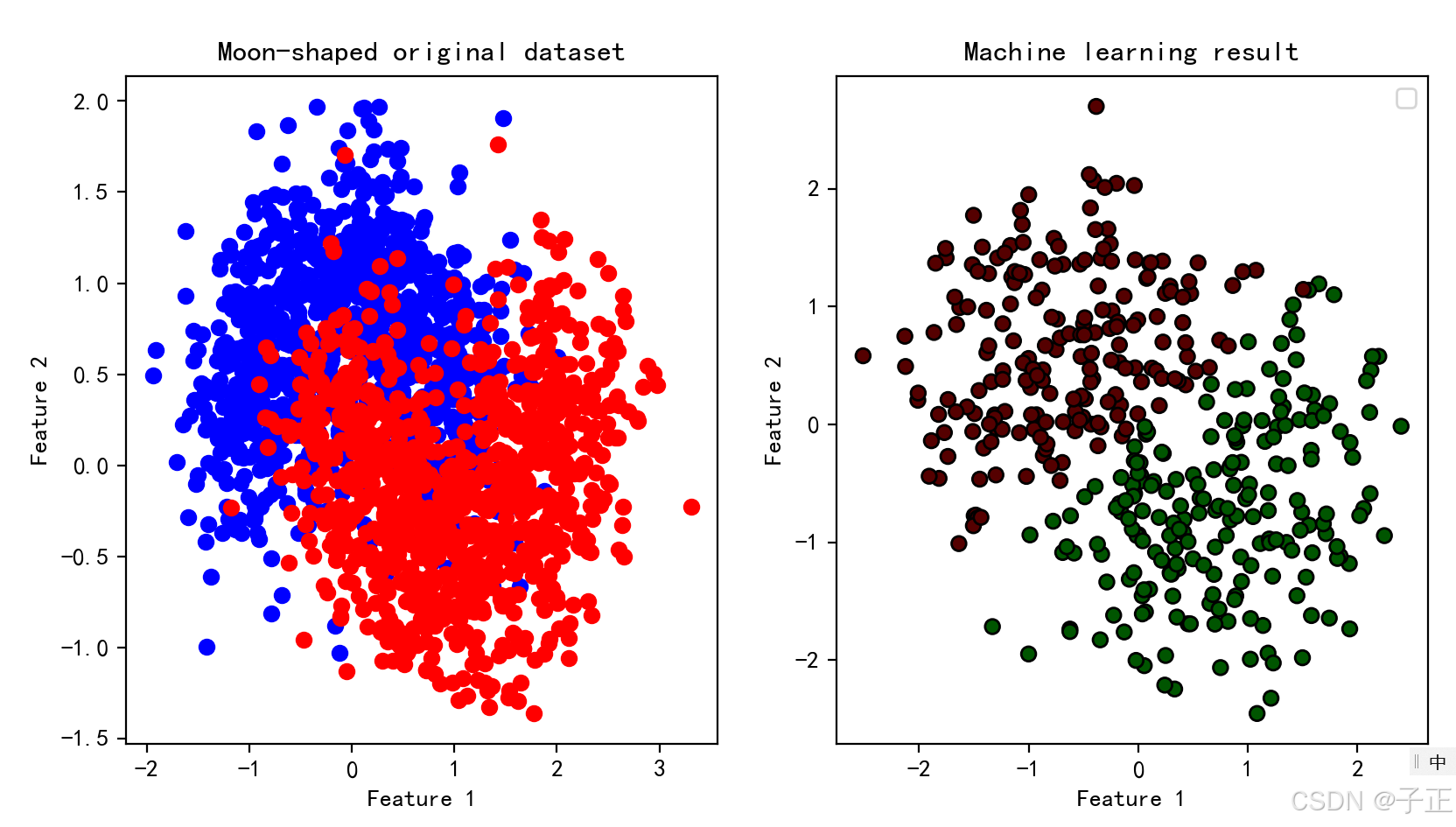
一个极简的反向传播实现
代码: GitCode - 全球开发者的开源社区,开源代码托管平台 这是2022年,北方交通大学的同志实现的。 包含机器学习的所有过程。前向,反向,损失函数,detect,然后数据集使用了sklearn.datasets的make_moons()…...
【小沐学Web3D】three.js 加载三维模型(React Three Fiber)
文章目录 1、简介1.1 Three.js1.2 React Three Fiber 2、测试2.1 初始化环境2.2 app.js修改(显示内置立方体)2.3 app.js修改(显示内置球体)2.4 app.js修改(显示自定义立方体)2.5 app.js修改(显示…...
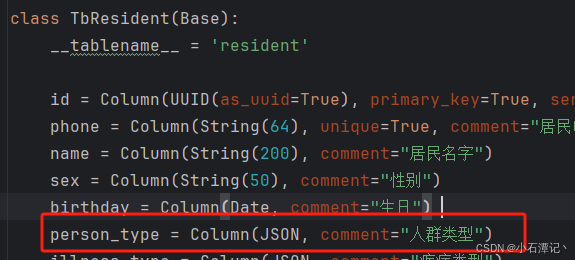
sqlalchemy查询json
第一种:字段op是json格式: {"uid": "cxb123456789","role": 2,"op_start_time": 1743513707504,"op_end_time": 1743513707504,"op_start_id": "op_001","op_end_id"…...
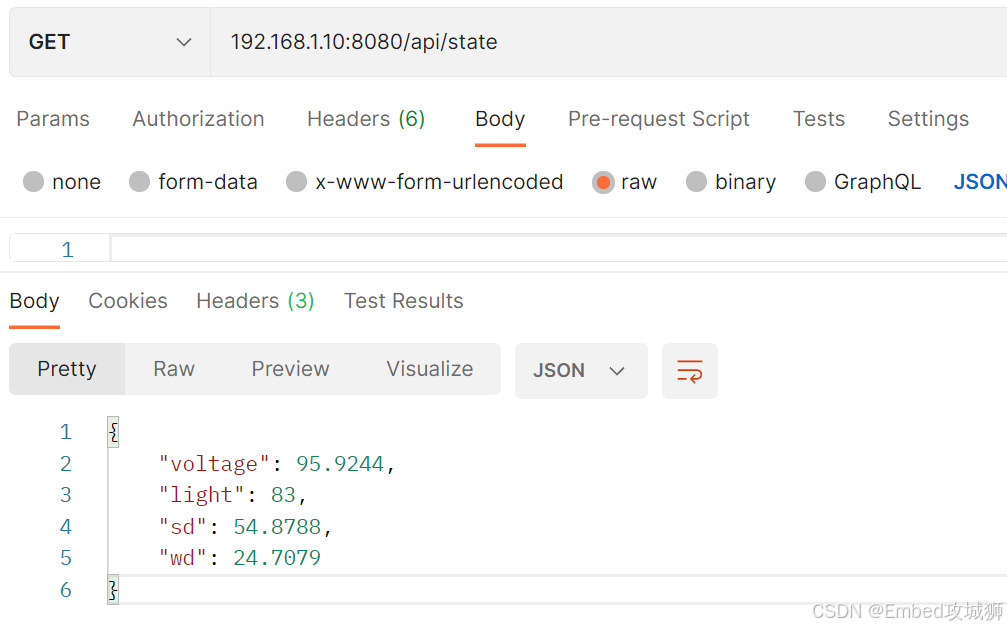
物联网外设管理服务平台
1 开发目标 1.1 架构图 操作系统:基于Linux5.10.10源码和STM32MP157开发板,完成tf-a(FSBL)、u-boot(SSBL)、uImage、dtbs的裁剪; 驱动层:为每个外设配置DTS并且单独封装外设驱动模块。其中电压ADC测试,采用linux内核…...
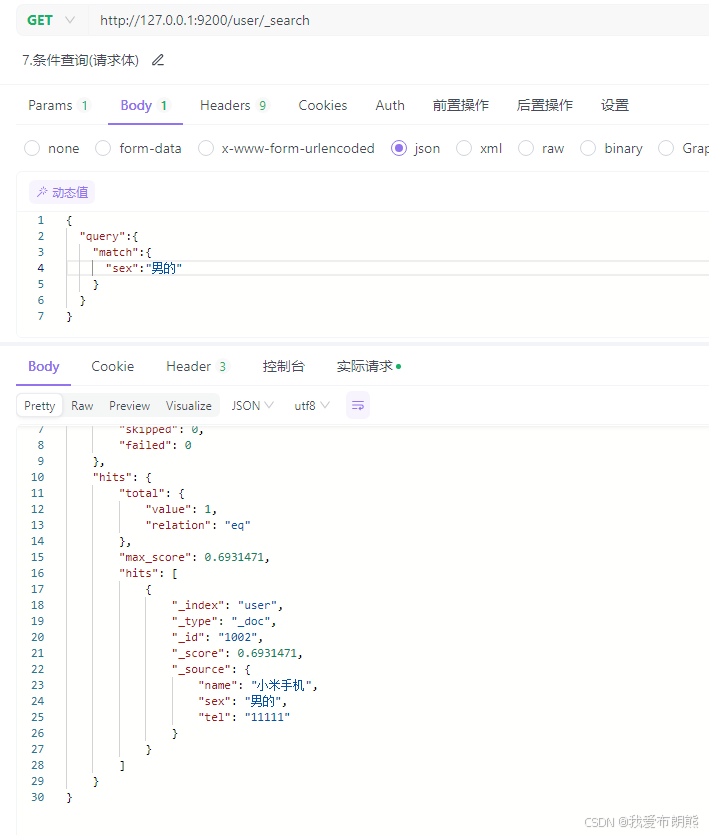
1.ElasticSearch-入门基础操作
一、介绍 The Elastic Stack 包含ElasticSearch、Kibana、Beats、LogStash 这就是所说的ELK 能够安全可靠地获取任何来源、任何格式的数据,然后实时地对数据进行搜索、分析和可视化。Elaticsearch,简称为ES,ES是一个开源的高扩展的分布式全文搜索引擎,是…...

uniapp加载json动画
一、添加canvas画布 <canvas id"lottie_demo" type"2d" style"display: inline-block;width: 148rpx; height: 148rpx;" /> 二、引入依赖和JSON文件 安装依赖 npm install lottie-miniprogram --save import lottie from lottie-mini…...

图论:最小生成树
最小生成树 (无向无环图) 概念 1.Prim算法 P3366 【模板】最小生成树 - 洛谷 邻接矩阵实现 #include<iostream> #include<cstring> using namespace std; const int INF 0x3f3f3f3f; const int N 5e3 10; int dis[N]; //记录每个结点到…...

智能多媒体处理流水线——基于虎跃办公API的自动化解决方案
在内容爆炸的时代,多媒体文件处理(图片压缩、视频转码、音频降噪)已成为内容生产者的日常挑战。本文将演示如何基于虎跃办公的多媒体处理API,构建自动化处理流水线,实现: 批量文件智能分类格式自动转换质量…...

虚拟表、TDgpt、JDBC 异步写入…TDengine 3.3.6.0 版本 8 大升级亮点
近日,TDengine 3.3.6.0 版本正式发布。除了此前已亮相的时序数据分析 AI 智能体 TDgpt,本次更新还带来了多个针对性能与易用性的重要增强:虚拟表全面上线,支持更灵活的一设备一表建模;JDBC 写入机制全新升级࿰…...

virt-manager配置NAT
在 virt-manager 中配置 NAT 模式,可以通过以下步骤完成。NAT(Network Address Translation)模式允许虚拟机通过宿主机的网络连接访问外部网络,同时对外隐藏虚拟机的真实 IP 地址。以下是具体操作步骤: 步骤 1&a…...
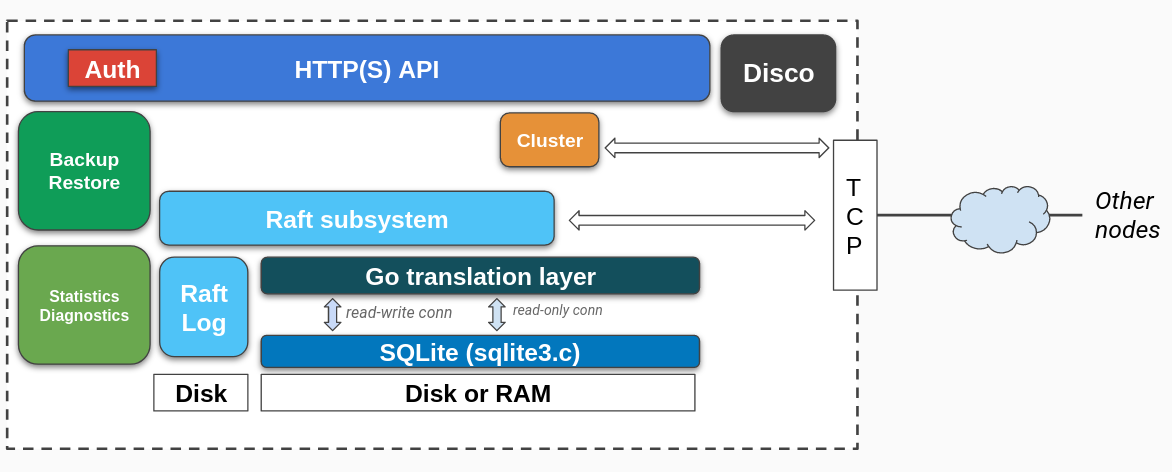
rqlite:一个基于SQLite构建的分布式数据库
今天给大家介绍一个基于 SQLite 构建的轻量级分布式关系型数据库:rqlite。 rqlite 基于 Raft 协议,结合了 SQLite 的简洁性以及高可用分布式系统的稳健性,对开发者友好,操作极其简便,其核心设计理念是以最低的复杂度实…...

Dynamics 365 Business Central Recurring Sales Lines 经常购买销售行 来作 订阅
#D365 BC ERP# #Navision# 前面有节文章专门介绍了BC 2024 Wave 2 支持的更好的Substription & Recurring Billing。 其实在D365 BC ERP中一直有一个比较简单的订阅模块Recrring Sales Lines。本文将介绍一下如何用Recurring Sales Lines来 实施简易的订阅Substription。具…...

【WebRTC】开源项目Webrtc-streamer介绍
WebRTC-Streamer 这是一个用于通过简单的信令机制(参见 api)流式传输 WebRTC 媒体源的实验项目,支持以下媒体源: 捕获设备 屏幕捕获 mkv 文件 RMTP/RTSP 源 同时该项目也兼容 WHEP 接口。 注意 * 在线演示已停止,…...
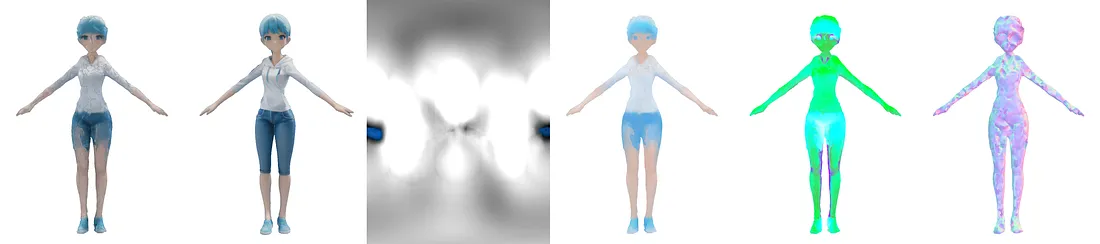
探索生成式AI在游戏开发中的应用——3D角色生成式 AI 实现
概述 自从开创性论文 Denoising Diffusion Probabilistic Models 发布以来,此类图像生成器一直在改进,生成的图像质量在多个指标上都击败了 GAN,并且与真实图像无法区分。 NeRF: Representing Scenes as Neural Radiance Fields for View S…...

androd的XML页面 跳转 Compose Activity 卡顿问题
解决 XML 点击跳转到 Compose Activity 卡顿问题 当从 XML 布局的 Activity 跳转到 Compose Activity 时出现卡顿现象,这通常是由以下几个原因导致的: 可能的原因及解决方案 1. Compose 首次初始化开销 问题:Compose 框架首次初始化需要时…...

神经网络能不能完全拟合y=x² ???
先说结论:关键看激活函数的选择 ReLU神经网络对非线性函数的拟合分析 ReLU神经网络对非线性函数(如 y x 2 y x^2 yx2)的拟合只能是逼近,而无法实现数学意义上的完全重合。这一结论源于ReLU的分段线性本质与目标函数的非线性结…...
与非逻辑视图(JSON、Excel、PDF、XML)详解及示例)
Spring MVC 逻辑视图(JSP、Thymeleaf、FreeMarker)与非逻辑视图(JSON、Excel、PDF、XML)详解及示例
Spring MVC 逻辑视图与非逻辑视图详解及示例 一、逻辑视图与非逻辑视图的定义 类型定义逻辑视图通过视图解析器(ViewResolver)将逻辑名称(如 success)映射到具体视图实现。非逻辑视图直接返回具体视图对象(如 JsonVie…...