14、nRF52xx蓝牙学习(串口 UART 和 UARTE 外设应用)
#define APP_UART_FIFO_INIT(P_COMM_PARAMS, RX_BUF_SIZE, TX_BUF_SIZE, EVT_HANDLER, IRQ_PRIO, ERR_CODE) \do \{ \app_uart_buffers_t buffers; \static uint8_t rx_buf[RX_BUF_SIZE]; \static uint8_t tx_buf[TX_BUF_SIZE]; \\buffers.rx_buf = rx_buf; \buffers.rx_buf_size = sizeof (rx_buf); \buffers.tx_buf = tx_buf; \buffers.tx_buf_size = sizeof (tx_buf); \ERR_CODE = app_uart_init(P_COMM_PARAMS, &buffers, EVT_HANDLER, IRQ_PRIO); \} while (0)代码理解:
代码概述 此代码定义了一个名为 APP_UART_FIFO_INIT 的宏,其用途是初始化一个基于 FIFO(先进先出)机制的 UART(通用异步收发传输器)通信。借助这个宏,你能够轻松地设置 UART 通信所需的参数,包含接收缓冲区、发送缓冲区、事件处理函数以及中断优先级等。
宏定义参数
• P_COMM_PARAMS:指向 UART 通信参数结构体的指针,该结构体里包含了波特率、数据位、停止位等 UART 通信所需的基本参数。
结构体定义如下 :
typedef struct
{uint32_t rx_pin_no; /**< RX pin number. */uint32_t tx_pin_no; /**< TX pin number. */uint32_t rts_pin_no; /**< RTS pin number, only used if flow control is enabled. */uint32_t cts_pin_no; /**< CTS pin number, only used if flow control is enabled. */app_uart_flow_control_t flow_control; /**< Flow control setting, if flow control is used, the system will use low power UART mode, based on CTS signal. */bool use_parity; /**< Even parity if TRUE, no parity if FALSE. */uint32_t baud_rate; /**< Baud rate configuration. */
} app_uart_comm_params_t;结构体解析:用于配置 UART(通用异步收发传输器)通信参数。下面解释结构体中每个成员的作用:
// 定义一个名为 app_uart_comm_params_t 的结构体,用于配置 UART 通信参数
typedef struct
{// RX 引脚编号,用于接收数据uint32_t rx_pin_no; /**< RX pin number. */// TX 引脚编号,用于发送数据uint32_t tx_pin_no; /**< TX pin number. */// RTS(请求发送)引脚编号,仅在启用流控制时使用uint32_t rts_pin_no; /**< RTS pin number, only used if flow control is enabled. */// CTS(清除发送)引脚编号,仅在启用流控制时使用uint32_t cts_pin_no; /**< CTS pin number, only used if flow control is enabled. */// 流控制设置,如果使用流控制,系统将基于 CTS 信号使用低功耗 UART 模式app_uart_flow_control_t flow_control; /**< Flow control setting, if flow control is used, the system will use low power UART mode, based on CTS signal. */// 是否使用奇偶校验,TRUE 表示使用偶校验,FALSE 表示不使用奇偶校验bool use_parity; /**< Even parity if TRUE, no parity if FALSE. */// 波特率配置,用于设置数据传输的速率uint32_t baud_rate; /**< Baud rate configuration. */
} app_uart_comm_params_t;
其中:app_uart_flow_control_t(控制流)是一个枚举类型,其定义如下:
typedef enum
{
APP_UART_FLOW_CONTROL_DISABLED, /**< UART Hw Flow Control is disabled. */
APP_UART_FLOW_CONTROL_ENABLED, /**< Standard UART Hw Flow Control is enabled. */
} app_uart_flow_control_t;
// 定义 app_uart_flow_control_t 枚举类型,用于表示 UART 硬件流控制状态
typedef enum
{
// UART 硬件流控制禁用
APP_UART_FLOW_CONTROL_DISABLED, /**< UART Hw Flow Control is disabled. */
// 标准 UART 硬件流控制启用
APP_UART_FLOW_CONTROL_ENABLED, /**< Standard UART Hw Flow Control is enabled. */
} app_uart_flow_control_t;
再回到开始的宏参数:
• RX_BUF_SIZE:接收缓冲区的大小,也就是用于存储从 UART 接收到的数据的缓冲区大小。 • TX_BUF_SIZE:发送缓冲区的大小,即用于存储要通过 UART 发送出去的数据的缓冲区大小。 • EVT_HANDLER:UART 事件处理函数的指针,当 UART 发生特定事件(像数据接收、发送完成等)时,会调用这个函数。
• IRQ_PRIO:UART 中断的优先级,用于设置 UART 中断在系统中的优先级。
• ERR_CODE:用于存储 UART 初始化的错误码,若初始化成功,该变量会被赋值为 0;若失败,则会被赋值为相应的错误码。
代码详细解析
#define APP_UART_FIFO_INIT(P_COMM_PARAMS, RX_BUF_SIZE, TX_BUF_SIZE, EVT_HANDLER, IRQ_PRIO, ERR_CODE) \
do \
{ \
app_uart_buffers_t buffers; \
static uint8_t rx_buf[RX_BUF_SIZE]; \
static uint8_t tx_buf[TX_BUF_SIZE]; \
\
buffers.rx_buf = rx_buf; \
buffers.rx_buf_size = sizeof (rx_buf); \
buffers.tx_buf = tx_buf; \
buffers.tx_buf_size = sizeof (tx_buf); \
ERR_CODE = app_uart_init(P_COMM_PARAMS, &buffers, EVT_HANDLER, IRQ_PRIO); \
} while (0)
1. 定义缓冲区和变量:
app_uart_buffers_t buffers;:定义一个 app_uart_buffers_t 类型的结构体变量 buffers,该结构体用于存储接收和发送缓冲区的信息。
app_uart_buffers_t 类型的结构体定义如下 :
typedef struct
{
uint8_t * rx_buf; /**< Pointer to the RX buffer. */
uint32_t rx_buf_size; /**< Size of the RX buffer. */
uint8_t * tx_buf; /**< Pointer to the TX buffer. */
uint32_t tx_buf_size; /**< Size of the TX buffer. */
} app_uart_buffers_t;
static uint8_t rx_buf[RX_BUF_SIZE];:定义一个静态的接收缓冲区数组 rx_buf,其大小由 RX_BUF_SIZE 决定。
static uint8_t tx_buf[TX_BUF_SIZE];:定义一个静态的发送缓冲区数组 tx_buf,其大小由 TX_BUF_SIZE 决定。
2. 初始化缓冲区信息:
buffers.rx_buf = rx_buf;:把 rx_buf 数组的地址赋值给 buffers 结构体的 rx_buf 成员。
buffers.rx_buf_size = sizeof (rx_buf);:把 rx_buf 数组的大小赋值给 buffers 结构体的 rx_buf_size 成员。
buffers.tx_buf = tx_buf;:把 tx_buf 数组的地址赋值给 buffers 结构体的 tx_buf 成员。
buffers.tx_buf_size = sizeof (tx_buf);:把 tx_buf 数组的大小赋值给 buffers 结构体的 tx_buf_size 成员。
3 调用 UART 初始化函数:
ERR_CODE = app_uart_init(P_COMM_PARAMS, &buffers, EVT_HANDLER, IRQ_PRIO);:调用 app_uart_init 函数来初始化 UART 通信,将初始化的错误码存储在 ERR_CODE 变量中。
下面是一个简单的使用示例:
#include <stdio.h>
// 假设的 UART 通信参数结构体
typedef struct {
int baud_rate;
// 其他参数...
} app_uart_comm_params_t;
// 假设的 UART 缓冲区结构体
typedef struct {
uint8_t *rx_buf;
size_t rx_buf_size;
uint8_t *tx_buf;
size_t tx_buf_size;
} app_uart_buffers_t;
// 假设的 UART 初始化函数
int app_uart_init(app_uart_comm_params_t *p_comm_params, app_uart_buffers_t *p_buffers, void (*evt_handler)(void), int irq_prio) {
// 实际的初始化代码
return 0; // 假设初始化成功
}
// 假设的 UART 事件处理函数
void uart_evt_handler(void) {
// 处理 UART 事件
}
// 定义宏
#define APP_UART_FIFO_INIT(P_COMM_PARAMS, RX_BUF_SIZE, TX_BUF_SIZE, EVT_HANDLER, IRQ_PRIO, ERR_CODE) \
do \
{ \
app_uart_buffers_t buffers; \
static uint8_t rx_buf[RX_BUF_SIZE]; \
static uint8_t tx_buf[TX_BUF_SIZE]; \
\
buffers.rx_buf = rx_buf; \
buffers.rx_buf_size = sizeof (rx_buf); \
buffers.tx_buf = tx_buf; \
buffers.tx_buf_size = sizeof (tx_buf); \
ERR_CODE = app_uart_init(P_COMM_PARAMS, &buffers, EVT_HANDLER, IRQ_PRIO); \
} while (0)
int main() {
app_uart_comm_params_t comm_params = {115200}; // 波特率设置为 115200
int err_code;
APP_UART_FIFO_INIT(&comm_params, 256, 256, uart_evt_handler, 1, err_code);
if (err_code == 0) {
printf("UART initialization successful.\n");
} else {
printf("UART initialization failed with error code: %d\n", err_code);
}
return 0;
}
在这个示例中,我们定义了一个简单的 UART 通信系统,并且使用 APP_UART_FIFO_INIT 宏来初始化 UART 通信。若初始化成功,会输出相应的提示信息;若失败,则会输出错误码。
(2)app_uart_init函数学习
uint32_t app_uart_init(const app_uart_comm_params_t * p_comm_params,app_uart_buffers_t * p_buffers,app_uart_event_handler_t event_handler,app_irq_priority_t irq_priority)
{uint32_t err_code;m_event_handler = event_handler;if (p_buffers == NULL){return NRF_ERROR_INVALID_PARAM;}// Configure buffer RX buffer.err_code = app_fifo_init(&m_rx_fifo, p_buffers->rx_buf, p_buffers->rx_buf_size);VERIFY_SUCCESS(err_code);// Configure buffer TX buffer.err_code = app_fifo_init(&m_tx_fifo, p_buffers->tx_buf, p_buffers->tx_buf_size);VERIFY_SUCCESS(err_code);nrf_drv_uart_config_t config = NRF_DRV_UART_DEFAULT_CONFIG;config.baudrate = (nrf_uart_baudrate_t)p_comm_params->baud_rate;config.hwfc = (p_comm_params->flow_control == APP_UART_FLOW_CONTROL_DISABLED) ?NRF_UART_HWFC_DISABLED : NRF_UART_HWFC_ENABLED;config.interrupt_priority = irq_priority;config.parity = p_comm_params->use_parity ? NRF_UART_PARITY_INCLUDED : NRF_UART_PARITY_EXCLUDED;config.pselcts = p_comm_params->cts_pin_no;config.pselrts = p_comm_params->rts_pin_no;config.pselrxd = p_comm_params->rx_pin_no;config.pseltxd = p_comm_params->tx_pin_no;err_code = nrf_drv_uart_init(&app_uart_inst, &config, uart_event_handler);VERIFY_SUCCESS(err_code);m_rx_ovf = false;// Turn on receiver if RX pin is connectedif (p_comm_params->rx_pin_no != UART_PIN_DISCONNECTED){return nrf_drv_uart_rx(&app_uart_inst, rx_buffer,1);}else{return NRF_SUCCESS;}
}(a)app_uart_init(const app_uart_comm_params_t * p_comm_params,
app_uart_buffers_t * p_buffers,
app_uart_event_handler_t event_handler,
app_irq_priority_t irq_priority)
{
* 此函数用于初始化 UART 通信,配置通信参数、缓冲区、事件处理函数和中断优先级。
*
* @param p_comm_params 指向 app_uart_comm_params_t 结构体的指针,包含 UART 通信参数,如引脚编号、流控制设置、奇偶校验和波特率等。
* @param p_buffers 指向 app_uart_buffers_t 结构体的指针,该结构体应包含用于 UART 数据收发的缓冲区。
* @param event_handler 指向 UART 事件处理函数的指针,当 UART 发生特定事件(如接收数据、发送完成等)时会调用此函数。
* @param irq_priority UART 中断的优先级,用于确定 UART 中断在系统中的处理顺序。
*
* @return 函数返回值类型未给出,一般可能返回一个状态码,用于表示初始化是否成功。
*/
由于不清楚 app_uart_buffers_t、app_uart_event_handler_t 和 app_irq_priority_t 的具体定义,下面给出一个简单的模拟实现:
#include <stdio.h>
#include <stdint.h>
// 假设 app_uart_flow_control_t 定义如下
typedef enum
{
APP_UART_FLOW_CONTROL_DISABLED, /**< UART Hw Flow Control is disabled. */
APP_UART_FLOW_CONTROL_ENABLED, /**< Standard UART Hw Flow Control is enabled. */
} app_uart_flow_control_t;
// 假设 app_uart_comm_params_t 定义如下
typedef struct
{
uint32_t rx_pin_no; /**< RX pin number. */
uint32_t tx_pin_no; /**< TX pin number. */
uint32_t rts_pin_no; /**< RTS pin number, only used if flow control is enabled. */
uint32_t cts_pin_no; /**< CTS pin number, only used if flow control is enabled. */
app_uart_flow_control_t flow_control; /**< Flow control setting, if flow control is used, the system will use low power UART mode, based on CTS signal. */
bool use_parity; /**< Even parity if TRUE, no parity if FALSE. */
uint32_t baud_rate; /**< Baud rate configuration. */
} app_uart_comm_params_t;
// 假设 app_uart_buffers_t 定义如下
typedef struct
{
uint8_t *rx_buffer;
uint8_t *tx_buffer;
size_t rx_buffer_size;
size_t tx_buffer_size;
} app_uart_buffers_t;
// 假设 app_uart_event_handler_t 是一个函数指针类型
typedef void (*app_uart_event_handler_t)(void);
// 假设 app_irq_priority_t 是一个枚举类型
typedef enum
{
APP_IRQ_PRIORITY_LOW,
APP_IRQ_PRIORITY_MEDIUM,
APP_IRQ_PRIORITY_HIGH
} app_irq_priority_t;
// 模拟实现 app_uart_init 函数
int app_uart_init(const app_uart_comm_params_t * p_comm_params,
app_uart_buffers_t * p_buffers,
app_uart_event_handler_t event_handler,
app_irq_priority_t irq_priority)
{
if (p_comm_params == NULL || p_buffers == NULL || event_handler == NULL)
{
return -1; // 输入参数无效
}
// 模拟配置 UART 通信参数
printf("Initializing UART with the following parameters:\n");
printf("RX Pin: %u\n", p_comm_params->rx_pin_no);
printf("TX Pin: %u\n", p_comm_params->tx_pin_no);
printf("Flow Control: %s\n", p_comm_params->flow_control == APP_UART_FLOW_CONTROL_ENABLED ? "Enabled" : "Disabled");
printf("Parity: %s\n", p_comm_params->use_parity ? "Even" : "None");
printf("Baud Rate: %u\n", p_comm_params->baud_rate);
// 模拟配置缓冲区
printf("RX Buffer Size: %zu\n", p_buffers->rx_buffer_size);
printf("TX Buffer Size: %zu\n", p_buffers->tx_buffer_size);
// 模拟设置事件处理函数
// 这里可以保存 event_handler 指针,在 UART 事件发生时调用
printf("Event handler set.\n");
// 模拟设置中断优先级
printf("Interrupt priority set to ");
switch (irq_priority)
{
case APP_IRQ_PRIORITY_LOW:
printf("LOW\n");
break;
case APP_IRQ_PRIORITY_MEDIUM:
printf("MEDIUM\n");
break;
case APP_IRQ_PRIORITY_HIGH:
printf("HIGH\n");
break;
default:
printf("UNKNOWN\n");
break;
}
return 0; // 初始化成功
}
使用示例
int main()
{
app_uart_comm_params_t comm_params = {
.rx_pin_no = 1,
.tx_pin_no = 2,
.rts_pin_no = 3,
.cts_pin_no = 4,
.flow_control = APP_UART_FLOW_CONTROL_ENABLED,
.use_parity = false,
.baud_rate = 115200
};
uint8_t rx_buffer[100];
uint8_t tx_buffer[100];
app_uart_buffers_t buffers = {
.rx_buffer = rx_buffer,
.tx_buffer = tx_buffer,
.rx_buffer_size = sizeof(rx_buffer),
.tx_buffer_size = sizeof(tx_buffer)
};
void dummy_event_handler()
{
// 处理 UART 事件的代码
}
app_irq_priority_t irq_priority = APP_IRQ_PRIORITY_MEDIUM;
int result = app_uart_init(&comm_params, &buffers, dummy_event_handler, irq_priority);
if (result == 0)
{
printf("UART initialization successful.\n");
}
else
{
printf("UART initialization failed.\n");
}
return 0;
}
上述代码中,首先为 app_uart_init 函数声明添加了详细注释,然后模拟实现了该函数,最后给出了一个使用示例,展示了如何调用 app_uart_init 函数进行 UART 初始化。
(b)
相关文章:
14、nRF52xx蓝牙学习(串口 UART 和 UARTE 外设应用)
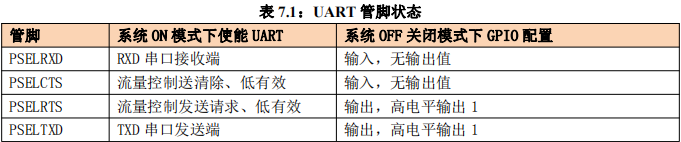
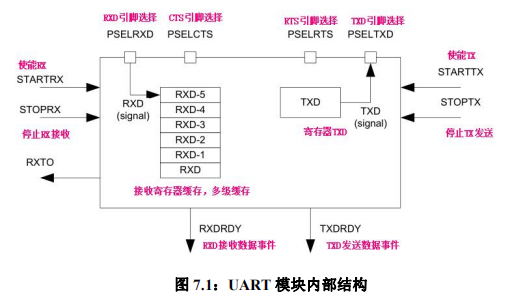
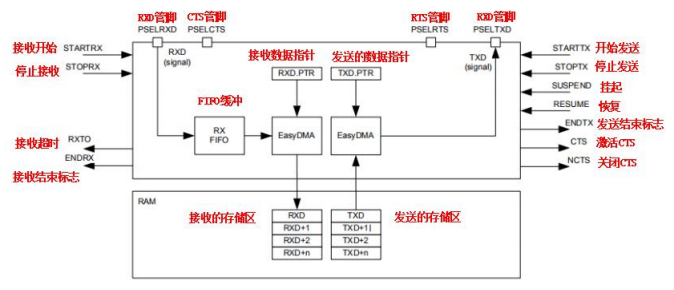
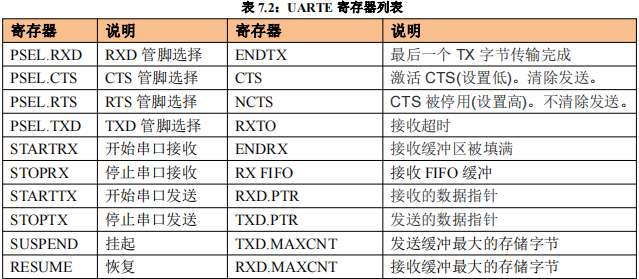
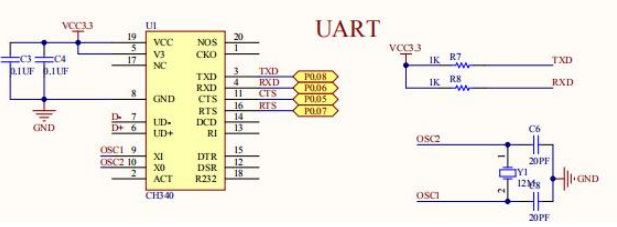
一、UART 功能描述 串口 UART 也称为通用异步收发器。是各种处理器中常用了通信接口,在 nRF52 芯片中, UART 具有以下特点: ● 全双工操作 ● 自动流控 ● 奇偶校验产生第 9 位数据 串口 UART 的数据发送与接收流程 : ◆硬件配置…...

FlinkSQL的常用语言
FlinkSQL 常用语言指南 FlinkSQL 是 Apache Flink 提供的 SQL 接口,允许用户使用标准 SQL 或扩展的 SQL 语法来处理流式和批式数据。以下是 FlinkSQL 的常用语言元素和操作: 基本查询 -- 选择查询 SELECT * FROM table_name;-- 带条件的查询 SELECT c…...
DeepSeek轻松入门教程——从入门到精通
大家好,我是吾鳴。 今天吾鳴要给大家分享一份DeepSeek小白轻松入门指导手册——《DeepSeek 15天指导手册,从入门到精通》。指导手册分为基础入门对话篇、效率飞跃篇、场景实战篇、高手进化篇等,按照指导手册操作,DeepSeek从入门到…...

Vue2 老项目升级 Vue3 深度解析教程
Vue2 老项目升级 Vue3 深度解析教程 摘要 Vue3 带来了诸多改进和新特性,如性能提升、组合式 API、更好的 TypeScript 支持等,将 Vue2 老项目升级到 Vue3 可以让项目获得这些优势。本文将深入解析升级过程,涵盖升级前的准备工作、具体升级步骤…...

vue事假机制都有哪些
Vue 的事件机制主要包含以下几种类型和方式,可以分为组件内部事件、父子组件通信事件、原生 DOM 事件封装、修饰符增强等,下面详细分类介绍: 一、DOM 事件绑定(最基础的事件) 使用 v-on(或简写 ࿰…...

WXJ196微机小电流接地选线装置使用简单方便无需维护
WXJ196微机小电流接地选线装置,能在系统发生单相接地时,准确、迅速地选出接地线路母 线。使用简单方便,无需维护,可根据用户需要将相关信息通过通信接口传给上级监控系统, 适用于无人值守变电站。 2 功能及特点 全新的…...
Java第四节:idea在debug模式夏改变变量的值
作者往期文章 Java第一节:debug如何调试程序(附带源代码)-CSDN博客 Java第二节:debug如何调试栈帧链(附带源代码)-CSDN博客 Java第三节:新手如何用idea创建java项目-CSDN博客 步骤一 在需要修改…...

instructor 实现 reranker 功能
目录 代码代码解释1. 导入和初始化2. Label 类定义3. RerankedResults 类4. 重排序函数 示例类似例子例子中的jinjia模板语法变量2. 控制结构条件语句循环语句 代码 import instructor from openai import OpenAI from pydantic import BaseModel, Field, field_validator, Va…...

门极驱动器DRV8353M设计(二)
目录 13.3.4.4 MOSFET VDS 感测 (SPI Only) 13.3.5 Gate Driver保护回路 13.3.5.1 VM 电源和 VDRAIN 欠压锁定 (UVLO) 13.3.5.2 VCP 电荷泵和 VGLS 稳压器欠压锁定 (GDUV) 13.3.5.3 MOSFET VDS过流保护 (VDS_OCP) 13.3.5.3.1 VDS Latched Shutdown (OCP_MODE 00b) 13.…...
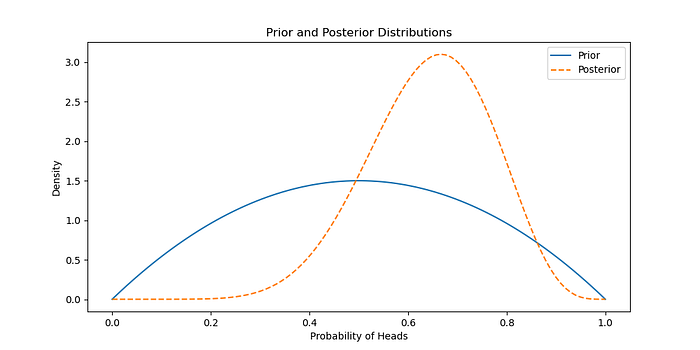
学点概率论,打破认识误区
概率论是统计分析和机器学习的核心。掌握概率论对于理解和开发稳健的模型至关重要,因为数据科学家需要掌握概率论。本博客将带您了解概率论中的关键概念,从集合论的基础知识到高级贝叶斯推理,并提供详细的解释和实际示例。 目录 简介 基本集合…...
NVIDIA AI Aerial
NVIDIA AI Aerial 适用于无线研发的 NVIDIA AI Aerial 基础模组Aerial CUDA 加速 RANAerial Omniverse 数字孪生Aerial AI 无线电框架 用例构建商业 5G 网络加速 5G生成式 AI 和 5G 数据中心 加速 6G 研究基于云的工具 优势100% 软件定义通过部署在数字孪生中进行测试6G 标准化…...

OpenCV 关键点定位
一、Opencv关键点定位介绍 关键点定位在计算机视觉领域占据着核心地位,它能够精准识别图像里物体的关键特征点。OpenCV 作为功能强大的计算机视觉库,提供了多种实用的关键点定位方法。本文将详细阐述关键点定位的基本原理,深入探讨 OpenCV 中…...

C++ 重构muduo网络库
本项目参考的陈硕老师的思想 1. 基础概念 进程里有 Reactor、Acceptor、Handler 这三个对象 Reactor 对象的作用是监听和分发事件;Acceptor 对象的作用是获取连接;Handler 对象的作用是处理业务; 先说说 阻塞I/O,非阻塞I/O&…...

SDHC接口协议底层传输数据是安全的
SDHC(Secure Digital High Capacity)接口协议在底层数据传输过程中确实包含校验机制,以确保数据的完整性和可靠性。以下是关键点的详细说明: 物理层与数据链路层的校验机制 物理层(Electrical Layer)&…...
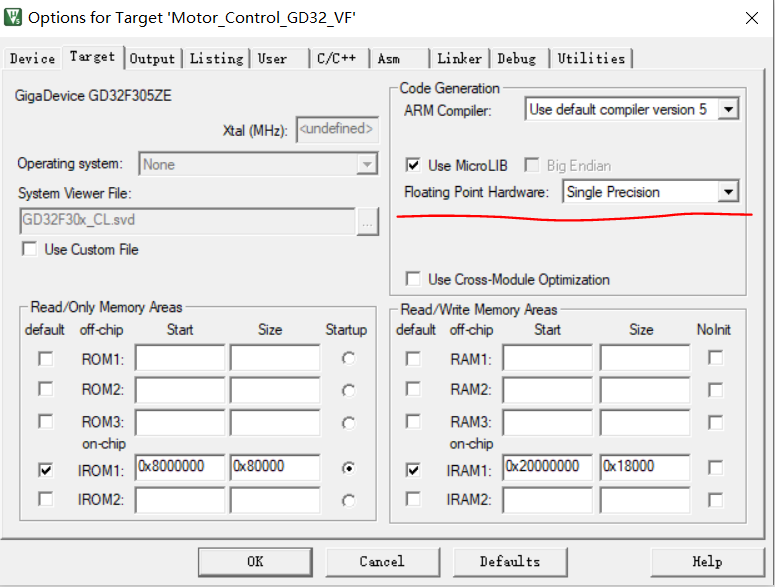
arm_math.h、arm_const_structs.h 和 arm_common_tables.h
在 FOC(Field-Oriented Control,磁场定向控制) 中,arm_math.h、arm_const_structs.h 和 arm_common_tables.h 是 CMSIS-DSP 库的核心组件,用于实现高效的数学运算、预定义结构和查表操作。以下是它们在 FOC 控…...
buuctf sql注入类练习
BUU SQL COURSE 1 1 实例无法访问 / Instance cant be reached at that time | BUUCTF但是这个地方很迷惑就是这个 一个 # 我们不抓包就不知道这个是sql注入类的判断是 get 类型的sql注入直接使用sqlmap我们放入到1.txt中 目的是 优先检测 ?id1>python3 sqlmap.py -r 1.t…...

具身导航中的视觉语言注意力蒸馏!Vi-LAD:实现动态环境中的社会意识机器人导航
作者:Mohamed Elnoor 1 ^{1} 1, Kasun Weerakoon 1 ^{1} 1, Gershom Seneviratne 1 ^{1} 1, Jing Liang 2 ^{2} 2, Vignesh Rajagopal 3 ^{3} 3, and Dinesh Manocha 1 , 2 ^{1,2} 1,2单位: 1 ^{1} 1马里兰大学帕克分校电气与计算机工程系, 2…...

全局前置守卫与购物车页面鉴权
在很多应用里,并非所有页面都能随意访问。例如购物车页面,用户需先登录才能查看。这时可以利用全局前置守卫来实现这一鉴权功能。 全局前置守卫的书写位置在 router/index.js 文件中,在创建 router 对象之后,暴露 router 对象之前…...

vue3 ts 自定义指令 app.directive
在 Vue 3 中,app.directive 是一个全局 API,用于注册或获取全局自定义指令。以下是关于 app.directive 的详细说明和使用方法 app.directive 用于定义全局指令,这些指令可以用于直接操作 DOM 元素。自定义指令在 Vue 3 中非常强大࿰…...
layui 弹窗-调整窗口的缩放拖拽几次就看不到标题、被遮挡了怎么解决
拖拽几次,调整窗口的缩放,就出现了弹出的页面,右上角叉号调不出来了,窗口关不掉 废话不多说直入主题: 在使用layer.alert layer.confirm layer.msg 等等弹窗时,发现看不到弹窗,然后通过控制台检查代码发现…...

网络空间安全(57)K8s安全加固
一、升级K8s版本和组件 原因:K8s新版本通常会引入一系列安全功能,提供关键的安全补丁,能够补救已知的安全风险,减少攻击面。 操作:将K8s部署更新到最新稳定版本,并使用到达stable状态的API。 二、启用RBAC&…...

2025蓝桥杯C++A组省赛 题解
昨天打完蓝桥杯本来想写个 p y t h o n python python A A A 组的题解,结果被队友截胡了。今天上课把 C A CA CA 组的题看了,感觉挺简单的,所以来水一篇题解。 这场 B B B 是一个爆搜, C C C 利用取余的性质比较好写&#…...
论文学习:《通过基于元学习的图变换探索冷启动场景下的药物-靶标相互作用预测》
原文标题:Exploring drug-target interaction prediction on cold-start scenarios via meta-learning-based graph transformer 原文链接:https://www.sciencedirect.com/science/article/pii/S1046202324002470 药物-靶点相互作用(DTI&…...

【题解-洛谷】P1824 进击的奶牛
题目:P1824 进击的奶牛 题目描述 Farmer John 建造了一个有 N N N( 2 ≤ N ≤...

机械革命 无界15X 自带的 有线网卡 YT6801 debian12下 的驱动方法
这网卡是国货啊。。。 而且人家发了驱动程序 Motorcomm Microelectronics. YT6801 Gigabit Ethernet Controller [1f0a:6801] 网卡YT6801在Linux环境中的安装方法 下载网址 yt6801-linux-driver-1.0.29.zip 我不知道别的系统是否按照说明安装就行了 但是debian12不行&…...
十八、TCP多线程、多进程并发服务器
1、TCP多线程并发服务器 服务端: #include<stdio.h> #include <arpa/inet.h> #include<stdlib.h> #include<string.h> #include <sys/types.h> /* See NOTES */ #include <sys/socket.h> #include <pthread.h>…...

JAVA中正则表达式的入门与使用
JAVA中正则表达式的入门与使用 一,基础概念 正则表达式(Regex) 用于匹配字符串中的特定模式,Java 中通过 java.util.regex 包实现,核心类为: Pattern:编译后的正则表达式对象。 Matcher&#…...

AIGC-文生图与图生图
在之前的文章中,我们知道了如何通过Web UI和Confy UI两种SD工具来进行图片生成,今天进一步地讲解其中的参数用处及如何调节。 文生图 参数详解 所谓文生图,就是通过文字描述我们想要图片包含的内容。初学的话,还是以Web UI为例…...

量化交易 - 聚宽joinquant - 多因子入门研究 - 源码开源
先看一下我们的收益: JoinQuant直达这里看看 下面讲解原理和代码。 目录 一、是否为st 二、是否停牌 三、市值小、roe大 四、编写回测代码 今天来研究一下多因子回测模型,这里以‘市值’、‘roe’作为例子。 几个标准:沪深300里选股&am…...

本地缓存方案Guava Cache
Guava Cache 是 Google 的 Guava 库提供的一个高效内存缓存解决方案,适用于需要快速访问且不频繁变更的数据。 // 普通缓存 Cache<Key, Value> cache CacheBuilder.newBuilder().maximumSize(1000) // 最大条目数.expireAfterWrite(10, TimeUnit.MINUTES) /…...