PyRoboPlan 库,给 panda 机械臂微分 IK 上大分,关节限位、碰撞全不怕
视频讲解:
PyRoboPlan 库,给 panda 机械臂微分 IK 上大分,关节限位、碰撞全不怕
代码仓库:https://github.com/LitchiCheng/mujoco-learning
今天分享PyRoboPlan库,比之前的方式优点在于,这个库考虑了机械臂的关节限位和碰撞,也就是生成出来的关节位置不会存在碰撞问题
官方仓库:https://github.com/sea-bass/pyroboplan
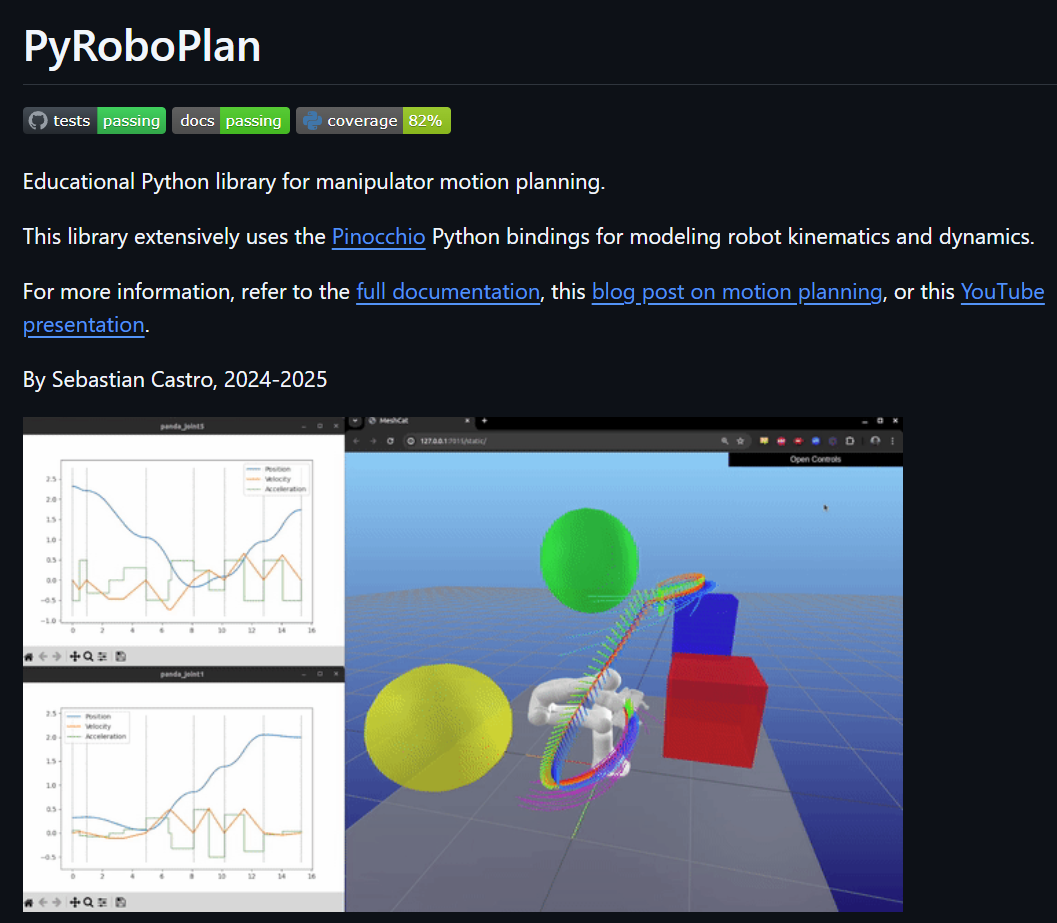
pyroboplan基于pinocchio,故先安装pinocchio再安装pyroboplan
pip3 install pyroboplan参考仓库中的 https://github.com/sea-bass/pyroboplan/blob/main/examples/differential_ik.py
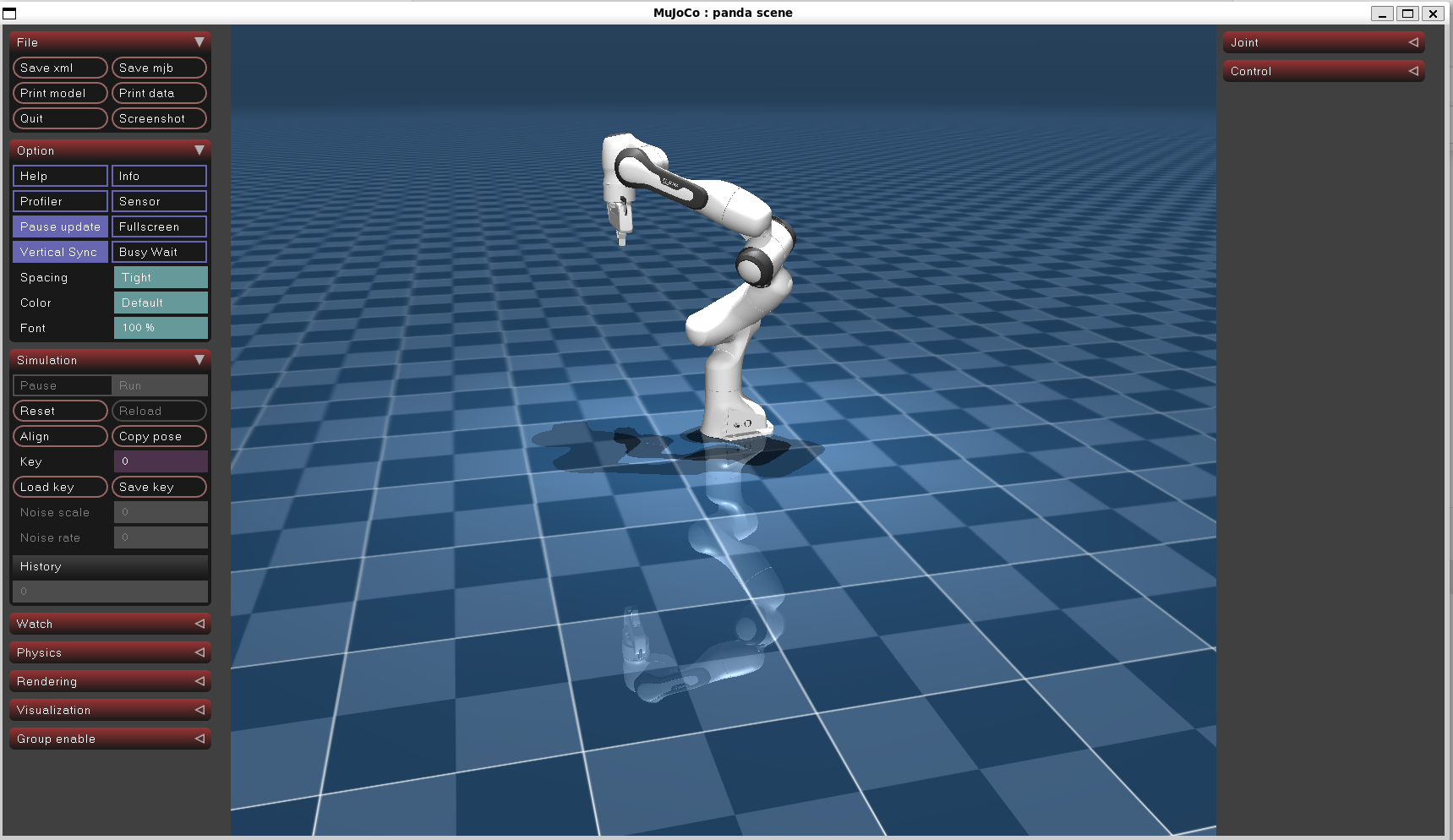
使用pyroboplan中的ik来进行panda机械臂的末端逆解测试
import mujoco_viewer
import mujoco,time
import numpy as np
import pinocchiofrom pyroboplan.core.utils import (get_random_collision_free_state,get_random_collision_free_transform,
)
from pyroboplan.ik.differential_ik import DifferentialIk, DifferentialIkOptions
from pyroboplan.ik.nullspace_components import (joint_limit_nullspace_component,collision_avoidance_nullspace_component,
)
from pyroboplan.models.panda import (load_models,add_self_collisions,add_object_collisions,
)class Test(mujoco_viewer.CustomViewer):def __init__(self, path):super().__init__(path, 3, azimuth=-45, elevation=-30)self.path = pathdef runBefore(self):# Create models and dataself.model_roboplan, self.collision_model, visual_model = load_models()add_self_collisions(self.model_roboplan, self.collision_model)add_object_collisions(self.model_roboplan, self.collision_model, visual_model, inflation_radius=0.1)data = self.model_roboplan.createData()collision_data = self.collision_model.createData()self.target_frame = "panda_hand"ignore_joint_indices = [self.model_roboplan.getJointId("panda_finger_joint1") - 1,self.model_roboplan.getJointId("panda_finger_joint2") - 1,]np.set_printoptions(precision=3)# Set up the IK solveroptions = DifferentialIkOptions(max_iters=200,max_retries=10,damping=0.0001,min_step_size=0.05,max_step_size=0.1,ignore_joint_indices=ignore_joint_indices,rng_seed=None,)self.ik = DifferentialIk(self.model_roboplan,data=data,collision_model=self.collision_model,options=options,visualizer=None,)self.nullspace_components = [lambda model_roboplan, q: collision_avoidance_nullspace_component(model_roboplan,data,self.collision_model,collision_data,q,gain=1.0,dist_padding=0.05,),lambda model_roboplan, q: joint_limit_nullspace_component(model_roboplan, q, gain=0.1, padding=0.025),] self.x = 0.29self.init_state = self.data.qpos.copy()def runFunc(self):# Solve IK several times and print the results# for _ in range(10):self.init_state = get_random_collision_free_state(self.model_roboplan, self.collision_model)# target_tform = get_random_collision_free_transform(# self.model_roboplan,# self.collision_model,# self.target_frame,# joint_padding=0.05,# )theta = np.pirotation_matrix = np.array([[1, 0, 0],[0, np.cos(theta), -np.sin(theta)],[0, np.sin(theta), np.cos(theta)]])# quat = [0.29, 0.79, -0.50, 0.13]# rotation_matrix = pinocchio.Quaternion(*quat).matrix()target_tform = pinocchio.SE3(rotation_matrix, np.array([self.x, -0.0, 0.69]))# print(target_tform)q_sol = self.ik.solve(self.target_frame,target_tform,init_state=self.init_state,nullspace_components=self.nullspace_components,verbose=True,)# self.init_state = self.data.qpos.copy()if q_sol is not None:self.end_effector_id = mujoco.mj_name2id(self.model, mujoco.mjtObj.mjOBJ_BODY, 'hand')print(f"End effector position: {self.data.body(self.end_effector_id).xpos}")print(f"q_sol: {q_sol}")self.data.qpos[:7] = q_sol[:7]self.x += 0.001else:print("No solution found.")time.sleep(0.01)if __name__ == "__main__":test = Test("/home/dar/MuJoCoBin/mujoco_menagerie/franka_emika_panda/scene.xml")test.run_loop()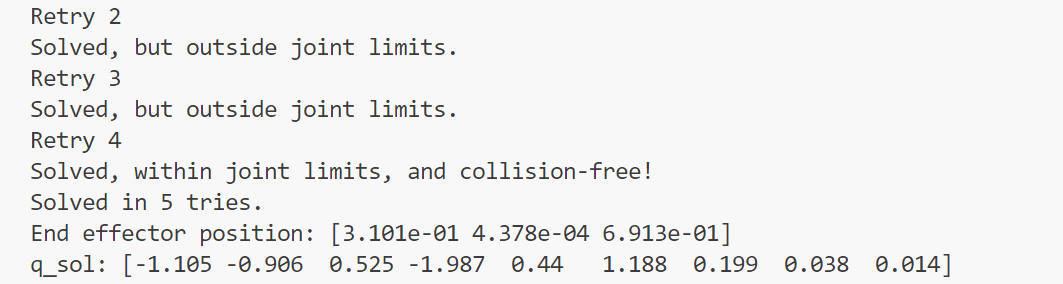
相关文章:
PyRoboPlan 库,给 panda 机械臂微分 IK 上大分,关节限位、碰撞全不怕
视频讲解: PyRoboPlan 库,给 panda 机械臂微分 IK 上大分,关节限位、碰撞全不怕 代码仓库:https://github.com/LitchiCheng/mujoco-learning 今天分享PyRoboPlan库,比之前的方式优点在于,这个库考虑了机械…...
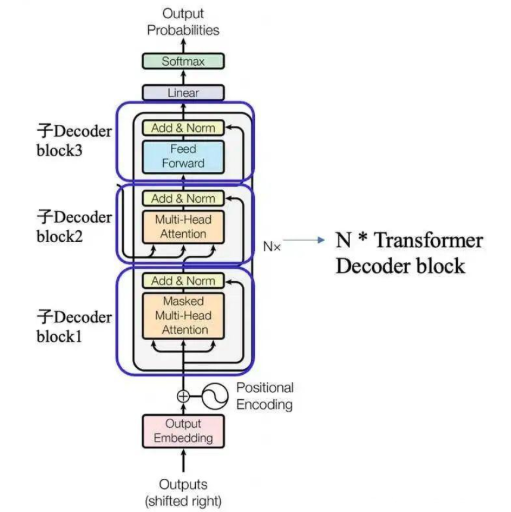
GPT - TransformerDecoderBlock
本节代码定义了一个 TransformerDecoderBlock 类,它是 Transformer 架构中解码器的一个基本模块。这个模块包含了多头自注意力(Multi-Head Attention)、前馈网络(Feed-Forward Network, FFN)和层归一化(Lay…...
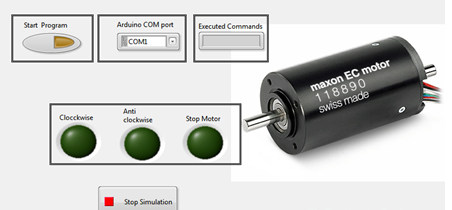
LabVIEW 控制电机需注意的关键问题
在自动化控制系统中,LabVIEW 作为图形化编程平台,因其高度可视化、易于集成硬件等优势,被广泛应用于电机控制场景。然而,要实现稳定、精确、高效的电机控制,仅有软件并不足够,还需结合硬件选型、控制逻辑设…...

CSS 定位属性的生动比喻:以排队为例理解 relative 与 absolute
目录 一、理解标准流与队伍的类比 二、relative 定位:队伍中 “小范围活动” 的人 三、absolute 定位:队伍中 “彻底离队” 的人 在学习 CSS 的过程中,定位属性relative和absolute常常让初学者感到困惑。它们的行为方式和对页面布局的影响较为抽象,不过,我们可以通过一个…...
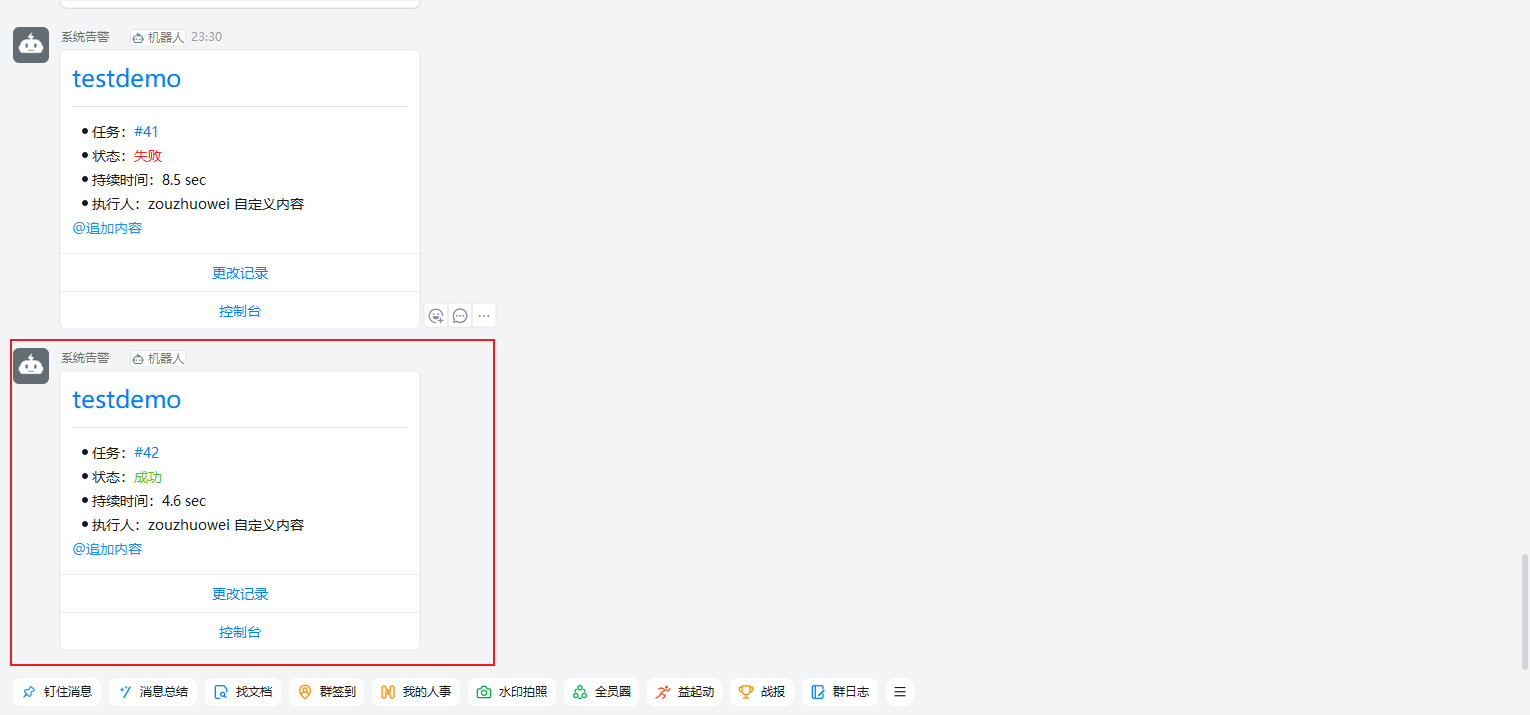
Jenkins 发送钉钉消息
这里不介绍 Jenkins 的安装,可以网上找到很多安装教程,重点介绍如何集成钉钉消息。 需要提前准备钉钉机器人的 webhook 地址。(网上找下,很多教程) 下面开始配置钉钉机器人,登录 Jenkins,下载 …...

nt!KeRemoveQueue 函数分析之加入队列后进入等待状态
第一部分: 参考例子:应用程序调用kernel32!GetQueuedCompletionStatus后会调用nt!KeRemoveQueue函数进入进入等待状态 0: kd> g Breakpoint 8 hit nt!KiDeliverApc: 80a3c776 55 push ebp 0: kd> kc # 00 nt!KiDeliverApc 01 nt…...

OpenCV 风格迁移
一、引言 在计算机视觉和图像处理领域,风格迁移是一项令人着迷的技术。它能够将一幅图像(风格图像)的艺术风格,如梵高画作的笔触风格、莫奈的色彩风格等,迁移到另一幅图像(内容图像)上&#x…...

35.Java线程池(线程池概述、线程池的架构、线程池的种类与创建、线程池的底层原理、线程池的工作流程、线程池的拒绝策略、自定义线程池)
一、线程池概述 1、线程池的优势 线程池是一种线程使用模式,线程过多会带来调度开销,进而影响缓存局部性和整体性能,而线程池维护着多个线程,等待着监督管理者分配可并发执行的任务,这避免了在处理短时间任务时创建与…...
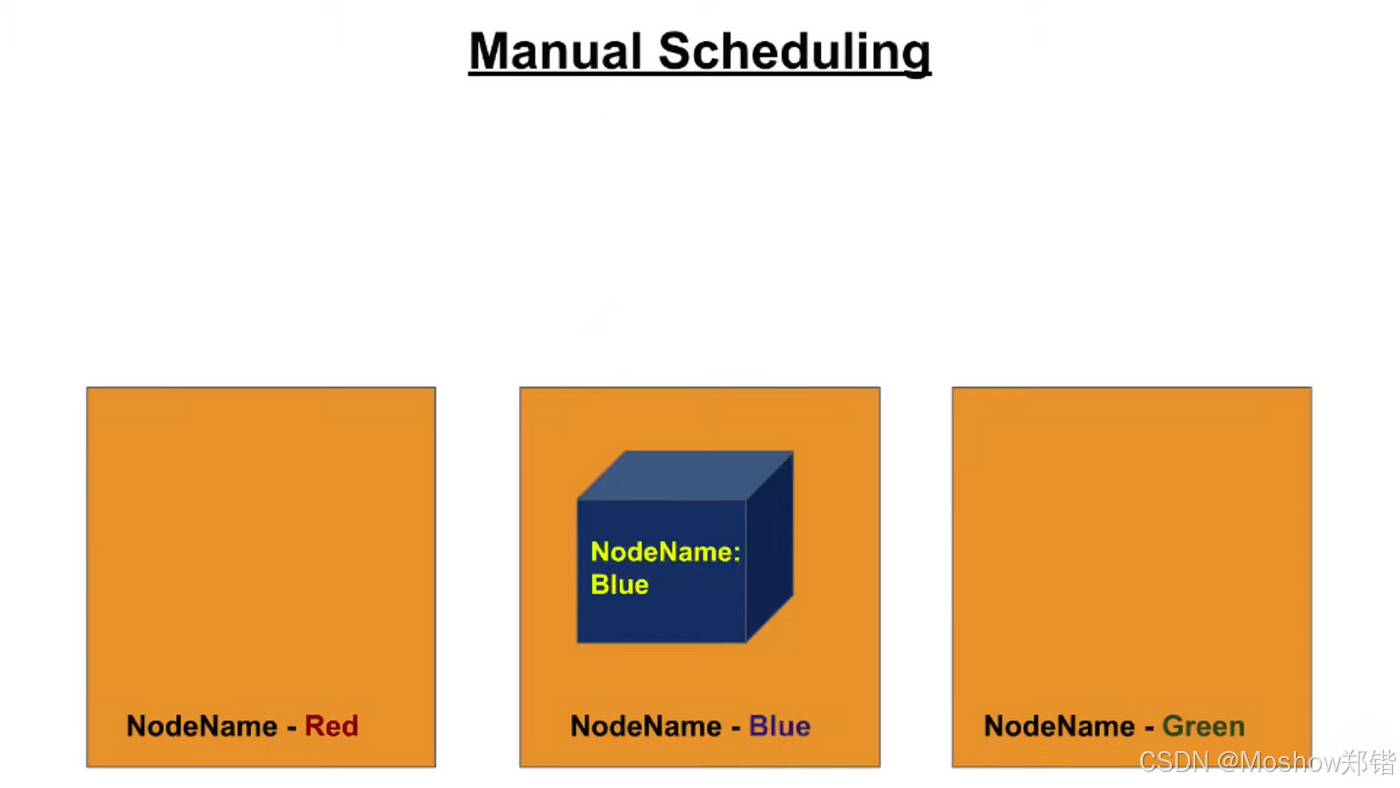
Kubernetes nodeName Manual Scheduling practice (K8S节点名称绑定以及手工调度)
Manual Scheduling 在 Kubernetes 中,手动调度框架允许您将 Pod 分配到特定节点,而无需依赖默认调度器。这对于测试、调试或处理特定工作负载非常有用。您可以通过在 Pod 的规范中设置 nodeName 字段来实现手动调度。以下是一个示例: apiVe…...

QML中访问c++数据,并实现类似C#中mvvm模式详细方法
1. 背景需求2. 实现步骤 2.1. 定义 Model(数据模型) 2.1.1. DataModel.h2.1.2. DataModel.cpp 2.2. 定义 ViewModel(视图模型) 2.2.1. PersonViewModel.h2.2.2. PersonViewModel.cpp 2.3. 在 QML 中使用 ViewModel 2.3.1. main.cp…...

React 获得dom节点和组件通信
通过REF 实例对象的.current属性获得绑定的DOM节点 组件通信 组件通信 1 父传子 父组件传递数据 子组件接受数据 通过pros对象接受 子组件的形参列表props只读 props中数据不可修改 特殊情况 在子传父的过程中没有直接给子组件添加属性,而是向父组件中添加其他…...
代码,Java Maven项目打包遇到的环境问题
这几天在写一些Java版本的Langchain4J的 AI 测试case,有一段时间不运行的Java环境,反复出现环境问题,记录下 1、Java编译版本的问题 修改编译版本: 2、在IDE中运行遇到Maven中JDK版本问题 在ide中执行maven命令,遇到下…...

fisco-bcos 关于服务bash status.sh启动runing 中但是5002端口监听不到,出错的问题
bash status.sh Server com.webank.webase.front.Application Port 5002 is running PID(4587) yjmyjm-VMware-Virtual-Platform:~/webase-front$ sudo netstat -anlp | grep 5002 没有端口信息输出 此时可以查看log文件夹下的WeBASE-front.log,找到报错信息如下…...

C++ 数据结构之图:从理论到实践
一、图的基本概念 1.1 图的定义与组成 图(Graph)由顶点(Vertex)和边(Edge)组成,形式化定义为: G (V, E) 顶点集合 V:表示实体(如城市、用户) …...

linux多线(进)程编程——(5)虚拟内存与内存映射
前言(前情回顾) 进程君开发了管道这门技术后,修真界的各种沟通越来越频繁,这天进程君正与自己的孩子沟通,进程君的孩子说道: “爸爸,昨天我看他们斗法,小明一拳打到了小刚的肚子上&…...

SpringBoot 动态路由菜单 权限系统开发 菜单权限 数据库设计 不同角色对应不同权限
介绍 系统中的路由配置可以根据用户的身份、角色或其他权限信息动态生成,而不是固定在系统中。不同的用户根据其权限会看到不同的路由,访问不同的页面。对应各部门不同的权限。 效果 [{"id": 1,"menuName": "用户管理"…...
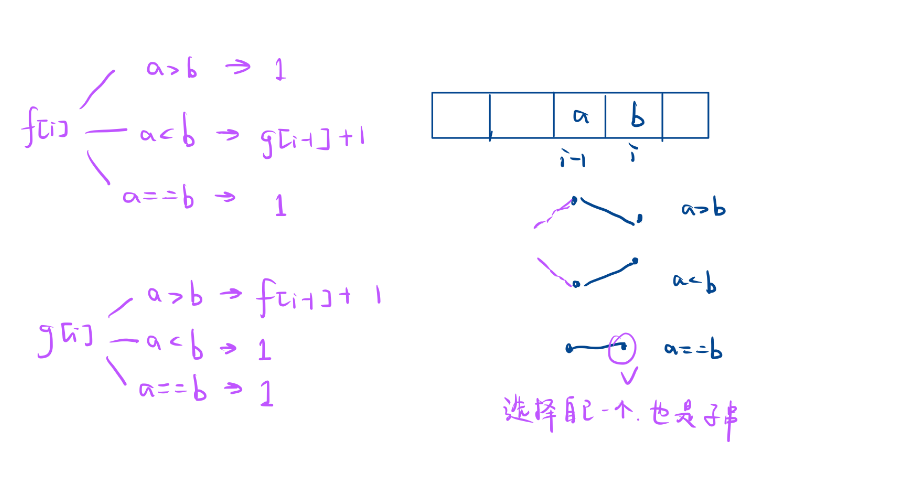
[dp8_子数组] 乘积为正数的最长子数组长度 | 等差数列划分 | 最长湍流子数组
目录 1.乘积为正数的最长子数组长度 2.等差数列划分 3.最长湍流子数组 写代码做到,只用维护好自己的一小步 1.乘积为正数的最长子数组长度 链接:1567. 乘积为正数的最长子数组长度 给你一个整数数组 nums ,请你求出乘积为正数的最长子数…...

资深词源学家提示词
Role: 资深词源学家 Profile: Language: 中文Description: 作为在词源学领域的卓越专家,具备深厚且多元的学术背景。精通拉丁语、古希腊语、梵语等一众古老语言,能够精准解析这些语言的古代文献,为探寻词汇起源挖掘第一手资料。在汉语研究方…...

深入探讨MySQL存储引擎:选择最适合你的数据库解决方案
前言 大家好,今天我们将详细探讨MySQL中几种主要的存储引擎,了解它们的工作机制、适用场景以及各自的优缺点。通过这篇文章,希望能帮助你根据具体需求选择最合适的存储引擎,优化数据库性能。 1. InnoDB - 默认且强大的事务性存储…...

【图像处理基石】什么是通透感?
一、画面的通透感定义 画面的通透感指图像在色彩鲜明度、空间层次感、物体轮廓清晰度三方面的综合表现,具体表现为: 色彩鲜明:颜色纯净且饱和度适中,无灰暗或浑浊感;层次分明:明暗过渡自然,光…...

无锡无人机超视距驾驶证怎么考?
无锡无人机超视距驾驶证怎么考?在近年来,无人机技术的迅猛发展使得无人机的应用场景变得愈发广泛,其不仅在环境监测、农业喷洒、快递配送等领域展现出真金白银的价值,同时也推动了无人机驾驶证的需求。尤其是在无锡,随…...

213、【图论】有向图的完全联通(Python)
题目描述 原题链接:105. 有向图的完全联通 代码实现 import collectionsn, k list(map(int, input().split())) adjacency collections.defaultdict(list) for _ in range(k):head, tail list(map(int, input().split()))adjacency[head].append(tail)visited_…...
安卓开发中的数据存储之SQLite简单使用)
(二十二)安卓开发中的数据存储之SQLite简单使用
在Android开发中,SQLite是一种非常常用的数据库存储方式。它轻量、简单,非常适合移动设备上的数据管理。本文将通过通俗易懂的语言,结合代码示例和具体场景,详细讲解SQLite在Android中的使用。 1. 什么是SQLite? SQLite是一个开…...
图像形态学操作对比(Opencv)
形态学基于图像的形状进行操作,用于处理二值化图像,主要包括腐蚀和膨胀两种基本操作。这些操作通常用于去除噪声、分隔或连接相邻的元素以及寻找图像中显著的最大点和最小点。 1. 形态学操作 import cv2 import numpy as np import matplotlib.pyplot …...

复刻系列-星穹铁道 3.2 版本先行展示页
复刻星穹铁道 3.2 版本先行展示页 0. 视频 手搓~星穹铁道~展示页~~~ 1. 基本信息 作者: 啊是特嗷桃系列: 复刻系列官方的网站: 《崩坏:星穹铁道》3.2版本「走过安眠地的花丛」专题展示页现已上线复刻的网…...

请你说一说测试用例的边界
一、什么是测试用例的边界? 边界是指输入、输出、状态或操作的极限条件,是系统行为可能发生变化的临界点。例如: 输入字段的最小值、最大值、空值、超长值; 循环的第0次、第1次、最后一次; 时间相关的闰年、月末、跨时区操作等。 边界测试的核心思想是:缺陷更容易出现在…...
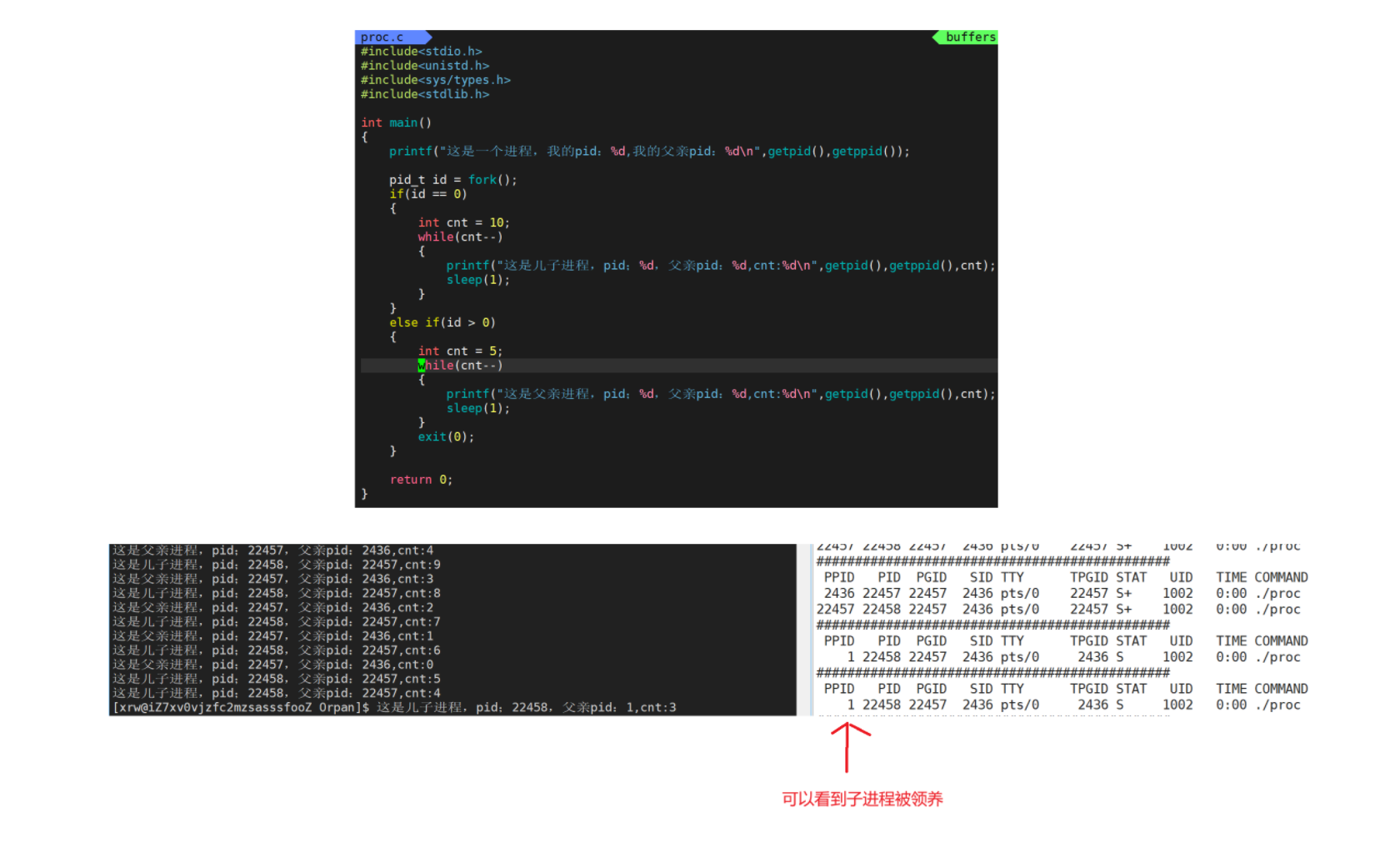
Linux:进程理解1(查看进程,创造进程,进程状态)
进程理解 (一)查看进程通过系统调用获取进程标示* (二)创造进程(fork)1. 创造的子进程的PCB代码数据怎么来?2.一个函数为什么有两个返回值?3. 为什么这里会有 两个 id值?…...
异形遮罩之QML中的 `OpacityMask` 实战
文章目录 🌧️ 传统实现的问题👉 效果图 🌈 使用 OpacityMask 的理想方案👉代码如下🎯 最终效果: ✨ 延伸应用🧠 总结 在 UI 设计中,经常希望实现一些“异形区域”拥有统一透明度或颜…...

如何为您的设计应用选择高速连接器
电气应用的设计过程需要考虑诸多因素,尤其是在设计高速网络时。许多连接器用户可能没有意识到,除了在两个互连之间组装导电线路之外,还需要考虑各种工艺。在建立高速连接并确保适当的信号完整性时,必须考虑蚀刻、公差、屏蔽等因素…...

mongodb 4.0+多文档事务的实现原理
1. 副本集事务实现(4.0) 非严格依赖二阶段提交 MongoDB 4.0 在副本集环境中通过 全局逻辑时钟(Logical Clock) 和 快照隔离(Snapshot Isolation) 实现多文档事务,事务提交时通过…...