Open-TeleVision源码解析——宇树摇操方案的重要参考:VR控制人形机器人采集数据
前言
本来针对Open-TeleVision的源码解析,是打算放在此文《从宇树摇操avp_teleoperate到unitree_IL_lerobot:如何基于宇树人形进行二次开发》中的,但考虑到为避免篇幅过长,故独立成此文
第一部分 Open-TeleVision的源码解析
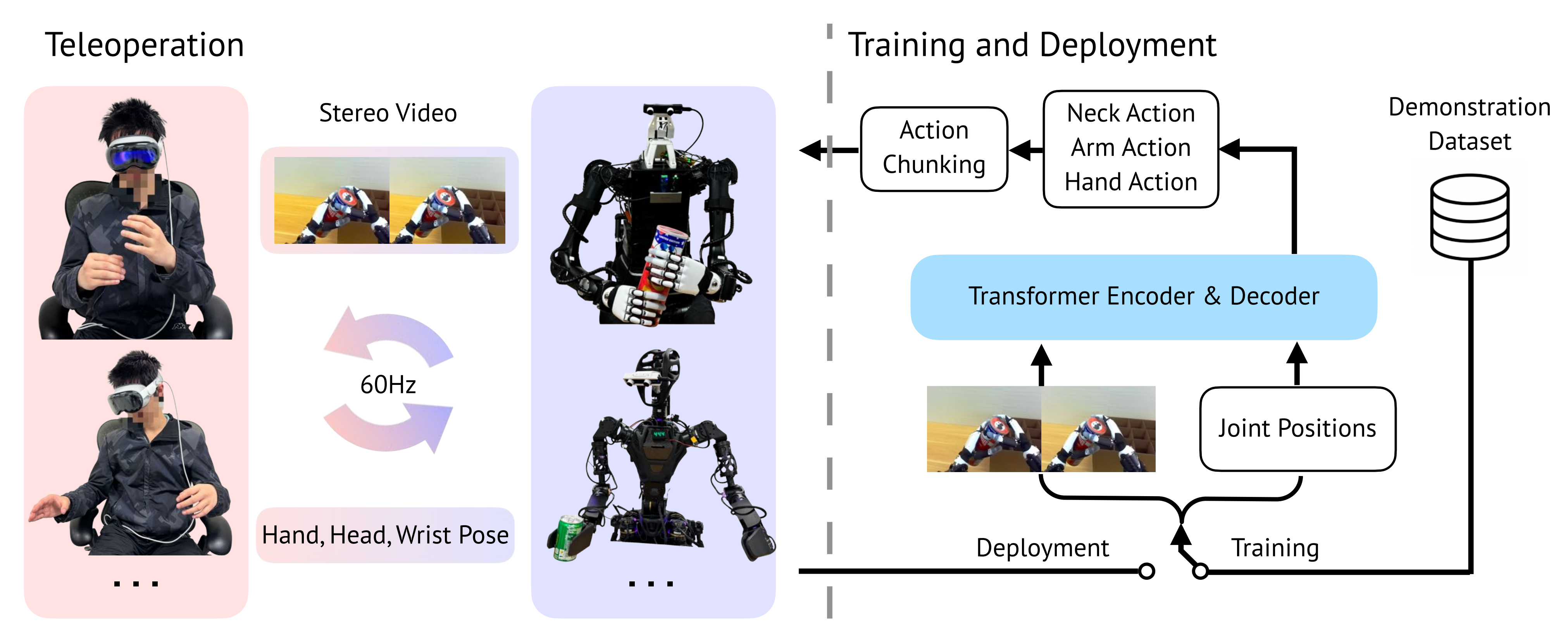
如本文开头所提到的, 此文《UC San Diego的三大机器人:AnyTeleop、Open-TeleVision、Bunny-VisionPro——从RGB相机到VR远程控制机器人》第二部分介绍了Open-television,其GitHub地址为:github.com/OpenTeleVision/TeleVision
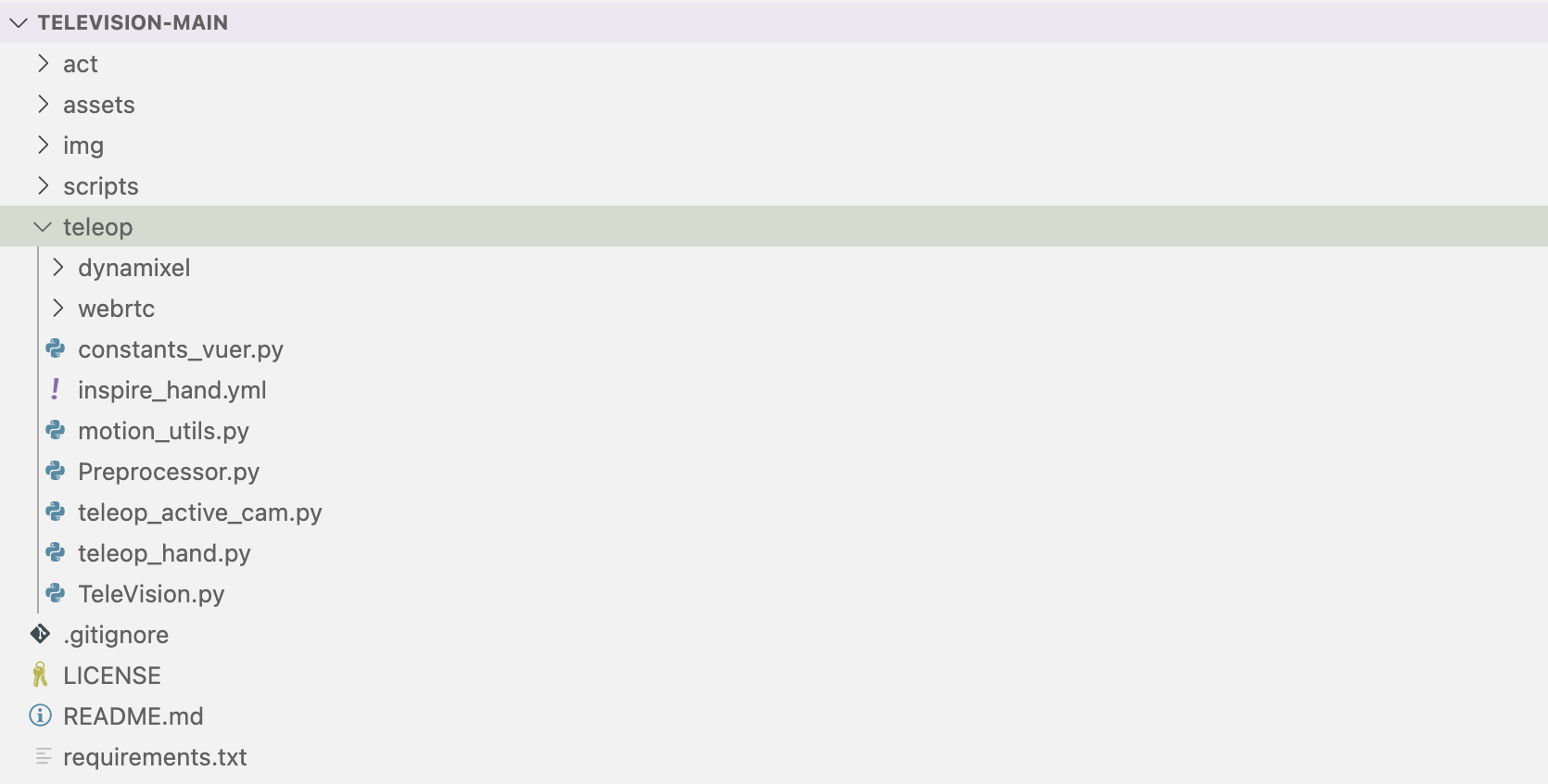
接下来,我们来整体了解下该television库的整体结构——不过 不逐行分析了
该项目主要分为以下几个核心部分:
- 远程操作系统(teleop/)
- 模仿学习模块(act/)
- 机器人资源文件** (assets/)
- 辅助脚本(scripts/)
- 图像资源** (img/)
2.1 远程操作系统 (teleop/)
这是项目的核心部分,负责实现远程操作功能
2.1.1 TeleVision.py
核心类 `OpenTeleVision`,负责初始化远程操作系统,处理视觉反馈和用户交互。它通过 `vuer` 库创建用户界面,并处理手部移动和相机移动事件
2.1.2 teleop_hand.py
处理手部跟踪和控制,将用户手部动作转换为机器人手部控制命令
2.1.3 teleop_active_cam.py
实现主动摄像机控制逻辑,根据用户头部动作调整摄像机视角
2.1.4 Preprocessor.py
处理输入数据预处理,如手部姿态和头部位置的标准化
2.1.5 motion_utils.py
提供运动相关的实用函数,如姿态变换和平滑处理
2.1.6 constants_vuer.py
定义系统中使用的常量
2.1.7 dynamixel/ 子目录
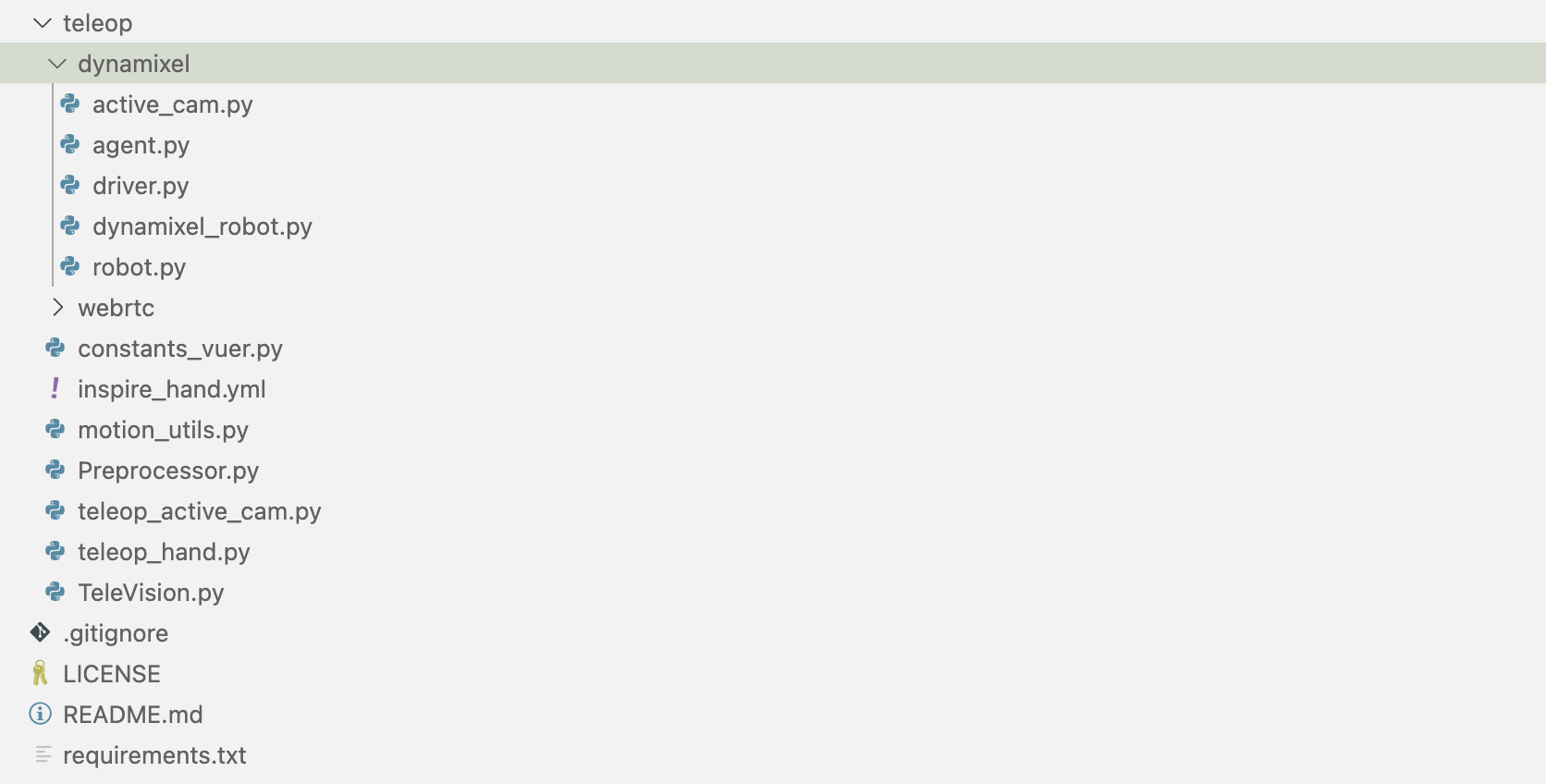
- dynamixel_robot.py:实现 Dynamixel 电机控制的机器人类,继承自基本的 `Robot` 类
- active_cam.py:控制主动摄像机,通过 Dynamixel 电机调整摄像机朝向
- robot.py:定义基本机器人接口,提供关节控制等基础功能
- driver.py:Dynamixel 电机驱动程序,负责底层电机通信和控制
- agent.py**:实现代理类,用于机器人行为策略的执行
2.1.8 webrtc/ 子目录
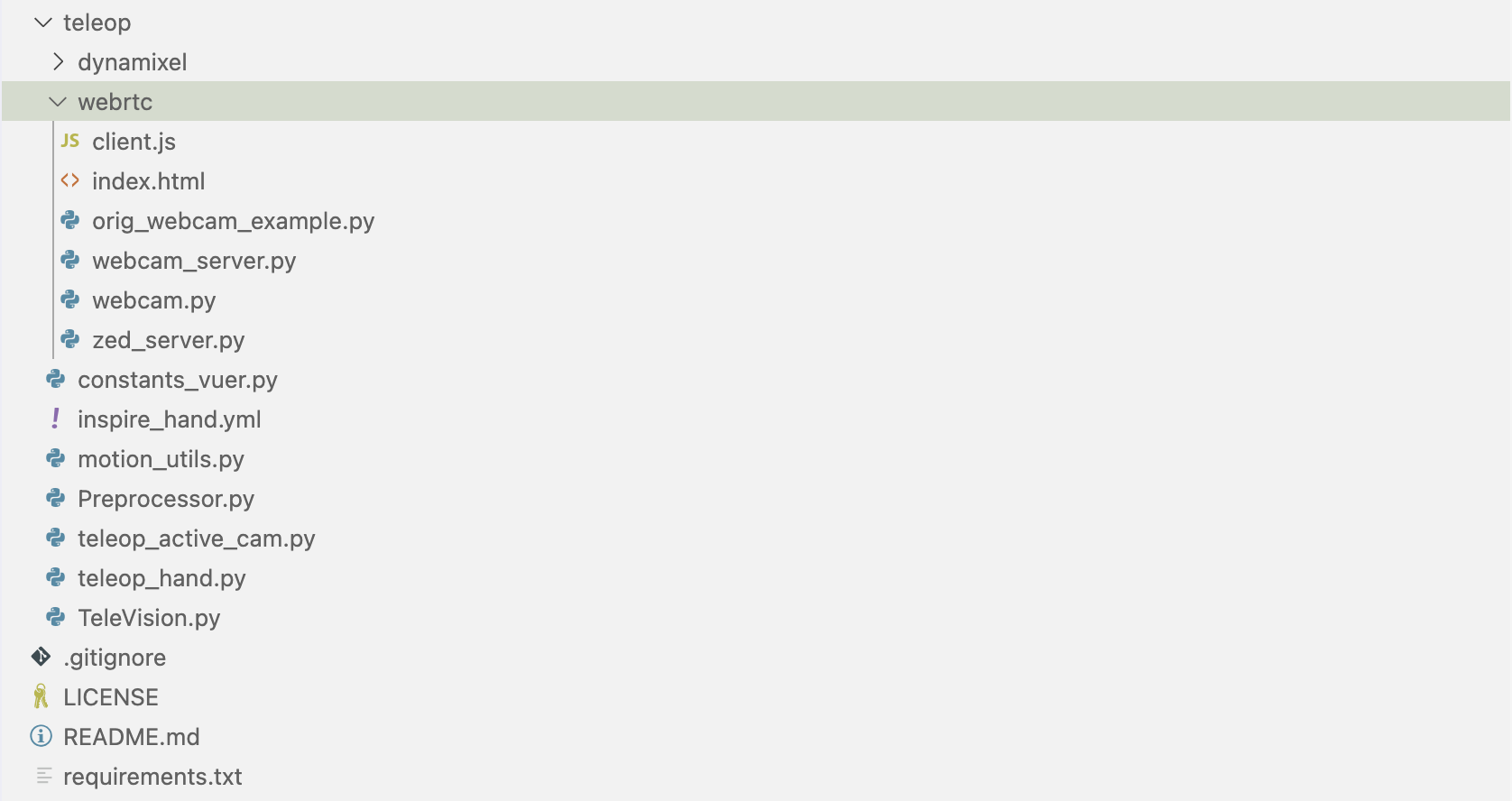
- zed_server.py:ZED 立体摄像头的 WebRTC 流媒体服务器,用于捕获和传输高质量视频流
- webcam_server.py**:普通网络摄像头的 WebRTC 服务器实现
- webcam.py:网络摄像头处理逻辑,用于捕获图像
- client.js和 **index.html:前端界面代码,用于显示视频流和交互
2.2 模仿学习模块 (act/)
这部分实现了基于视觉的模仿学习功能
2.2.1 imitate_episodes.py:处理训练数据和学习过程
模仿学习的主要脚本,处理训练数据和学习过程
2.2.2 policy.py:策略网络,将视觉输入映射到机器人动作
定义机器人策略网络,将视觉输入映射到机器人动作
2.2.3 utils.py
提供模仿学习相关的实用函数
2.2.4 detr/ 子目录
这是基于 DETR(DEtection TRansformer)的视觉模型实现
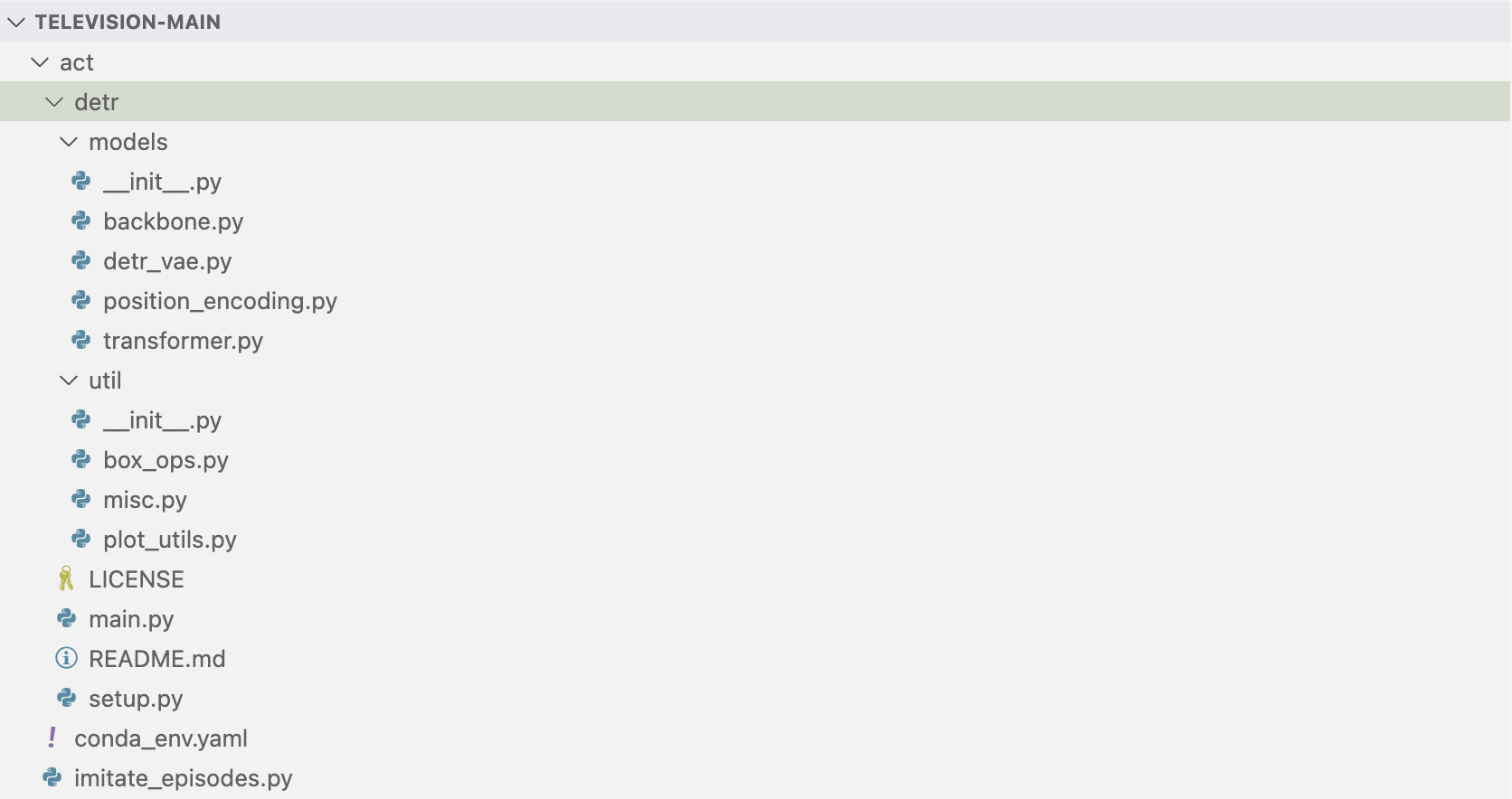
- models/:
- detr_vae.py:结合 DETR 和变分自编码器的视觉模型。
- transformer.py:Transformer 架构实现。
- backbone.py:视觉骨干网络,如 ResNet
- position_encoding.py:位置编码实现
- util/:
- box_ops.py:处理边界框操作的函数
- misc.py:实用函数集合
- plot_utils.py:可视化工具
2.3 机器人资源文件 (assets/)
包含机器人的 3D 模型和配置文件
2.3.1 h1_inspire/
包含 Inspire 机器人的 URDF 模型、网格文件和启动脚本
2.3.2 inspire_hand/
Inspire 机器人手部的 URDF 模型和网格文件
2.4 辅助脚本 (scripts/)
包含用于部署、评估和数据处理的脚本
2.4.1 deploy_sim.py:部署仿真环境的脚本
2.4.2 replay_demo.py「回放演示数据的脚本
2.4.3 plot_action.py:绘制机器人动作的脚本
2.4.4 post_process.py:后处理数据的脚本
2.5 核心调用关系
2.5.1 远程操作系统的调用流程
- TeleVision.py 作为入口点,初始化 `OpenTeleVision` 类
- 它使用 `webrtc/zed_server.py` 或直接共享内存图像来提供视觉反馈
- 当收到用户交互事件时(如手部移动或相机移动),调用相应的处理函数
- 手部控制通过 `teleop_hand.py` 实现,将用户手势转换为机器人控制命令
- 摄像机控制通过 `teleop_active_cam.py` 和 `dynamixel/active_cam.py` 实现
2.5.2 机器人控制链
- `teleop_hand.py` → `dynamixel/agent.py` → dynamixel_robot.py → `dynamixel/driver.py`
- 从高级手势识别到低级电机指令的转换过程。
2.5.3 视觉反馈路径
- `webrtc/zed_server.py` 捕获 ZED 摄像头数据
- 通过 WebRTC 协议将视频流传输到客户端
- 客户端通过 `webrtc/client.js` 和 `webrtc/index.html` 显示视频流
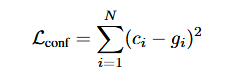
2.5.4 模仿学习流程:收集和处理数据,之后DETR提取特征、策略训练、控制
- imitate_episodes.py 收集和处理用户演示数据
- 使用 detr 中的视觉模型提取特征
- policy.py 学习将视觉状态映射到机器人动作
- 学习后的策略可用于自动化控制
2.5.5 数据共享机制
- 系统使用进程间通信机制,如共享内存、队列和事件
- 手部姿态数据通过 `left_hand_shared` 和 `right_hand_shared` 共享数组传递
- 头部位置数据通过 `head_matrix_shared` 共享
- 这些共享数据结构允许实时、低延迟的数据传输
// 待更
相关文章:
Open-TeleVision源码解析——宇树摇操方案的重要参考:VR控制人形机器人采集数据
前言 本来针对Open-TeleVision的源码解析,是打算放在此文《从宇树摇操avp_teleoperate到unitree_IL_lerobot:如何基于宇树人形进行二次开发》中的,但考虑到为避免篇幅过长,故独立成此文 第一部分 Open-TeleVision的源码解析 如本…...

Embedding质量评估、空间塌缩、 Alignment Uniformity
Embedding质量的评估和空间塌缩的解决是自然语言处理(NLP)和推荐系统领域的关键问题。以下是综合多篇研究的总结: 一、Embedding质量评估方法 基准测试与任务指标 MTEB/C-MTEB:使用多语言或中文的基准测试集(如58个数据…...
 E - level up)
[题解] Educational Codeforces Round 168 (Rated for Div. 2) E - level up
链接 思路 1 注意到在 k ∈ [ 1 , n ] k \in [1,n] k∈[1,n] 可以得到的最高等级分别为: n , n 2 , n 3 . . . . . n n n,\frac{n}{2},\frac{n}{3}.....\frac{n}{n} n,2n,3n.....nn, 总的个数是一个调和级数, s u m n ∗ ln n sumn*\ln n sumn∗lnn, 完全可以处…...

Lua 中的 table 类型详解
Lua 中的 table 类型详解 table 是 Lua 中唯一的数据结构机制,它实现了关联数组的功能,可以用来表示普通数组、序列、符号表、集合、记录、图、树等几乎所有数据结构。 基本特性 table 是 Lua 中唯一的数据结构类型可以包含任意类型的值(n…...

github进阶使用教程
目录索引 一、基本内容 repository fork star codespaces issue 在一个仓库创建话题讨论,可以由仓库主人选择开始和结束话题的讨论 pull request(也称 pr) 协同其他仓库开发,请求仓库主人拉取自己的代码合并到仓库的主分支&…...
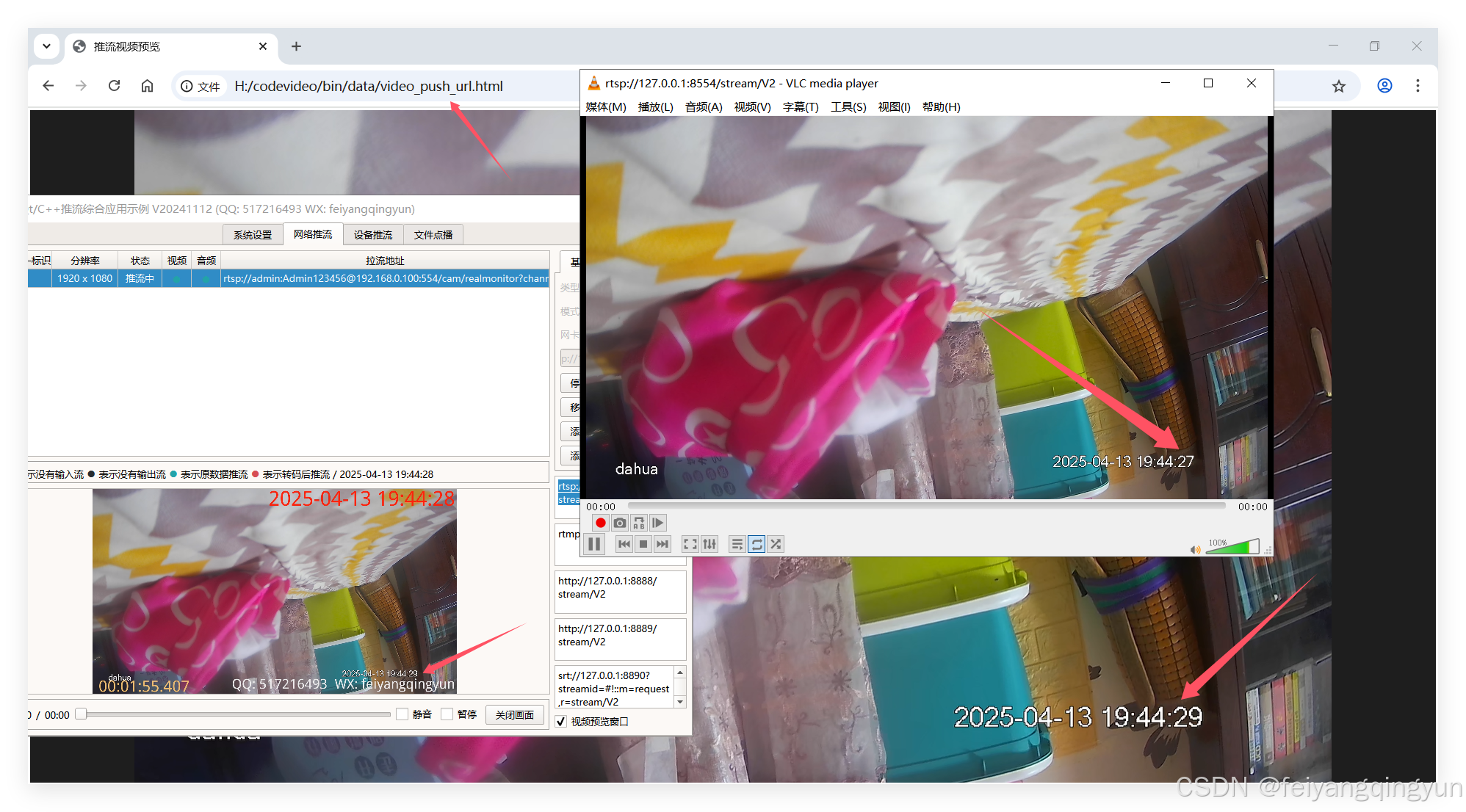
推流265视频,网页如何支持显示265的webrtc
科技发展真快,以前在网页上(一般指谷歌浏览器),要显示265的视频流,都是很鸡肋的办法,要么转码,要么用很慢的hls,体验非常不好,而今谷歌官方最新的浏览器已经支持265的web…...

“破解”GPT-4o生图技术:万物皆可吉卜力的技术路线推测
👉目录 1 GPT-4o 的神奇魔法 2 GPT-4o 可能的技术路线推测 3 结语 最近 GPT-4o 生图模型横空出世,效果和玩法上都有突破性的进展,笔者整理了一下目前相关的技术,抛砖引玉一下,希望有更多大神分享讨论。 图源小红书恶魔…...
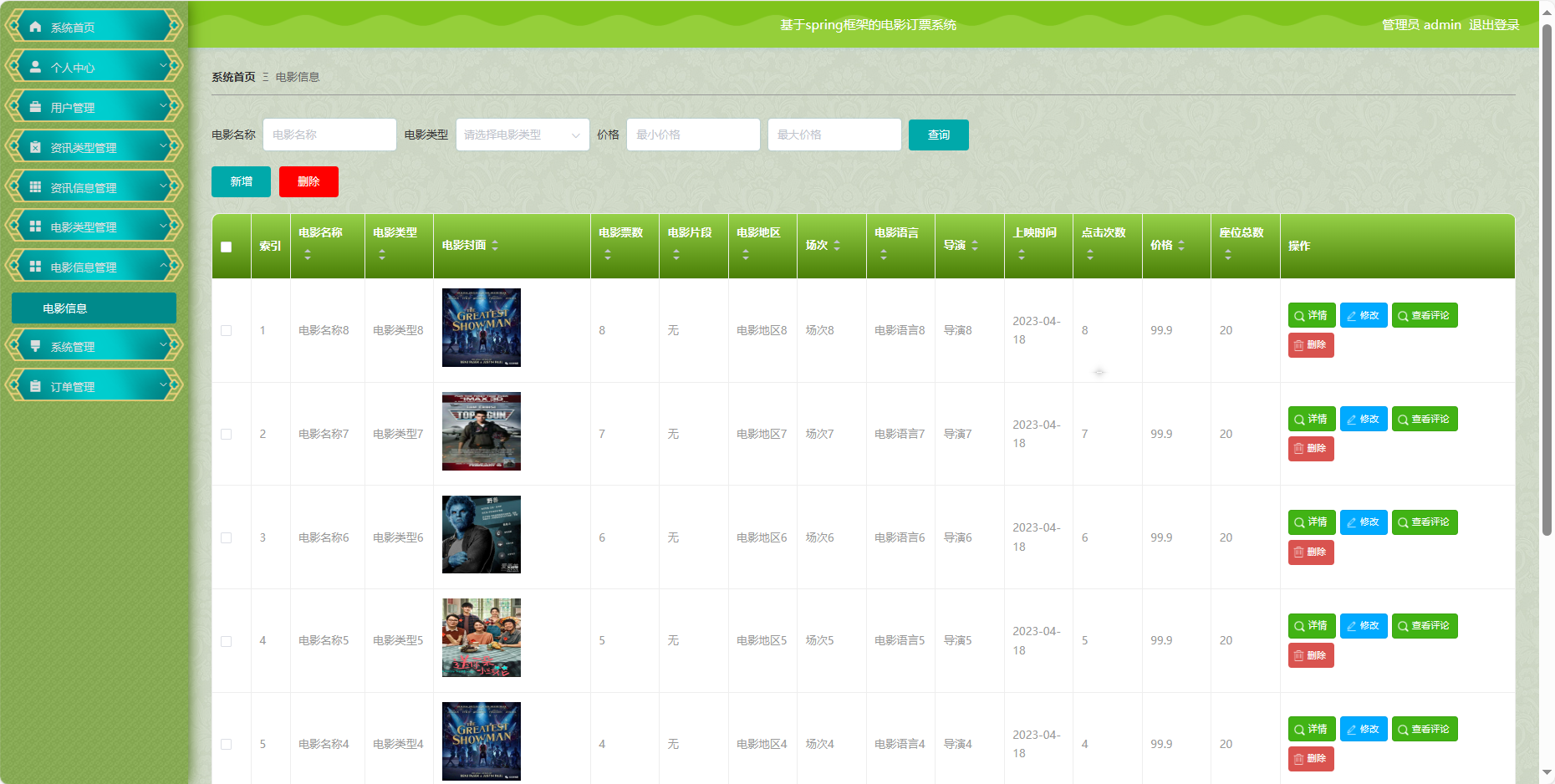
基于SpringBoot的电影订票系统(源码+数据库+万字文档+ppt)
504基于SpringBoot的电影订票系统,系统包含两种角色:管理员、用户主要功能如下。 【用户功能】 首页:浏览系统电影动态。 资讯信息:获取有关电影行业的新闻和资讯。 电影信息:查看电影的详细信息和排片情况。 公告信…...

07-算法打卡-链表-移除链表-leetcode(203)-第七天
1 题目地址 203. 移除链表元素 - 力扣(LeetCode)203. 移除链表元素 - 给你一个链表的头节点 head 和一个整数 val ,请你删除链表中所有满足 Node.val val 的节点,并返回 新的头节点 。 示例 1:[https://assets.leetc…...

[C++面试] 初始化相关面试点深究
一、入门 1、C中基础类型的初始化方式有哪些?请举例说明 默认初始化 对于全局变量和静态变量,基础类型(如int、float、double等)会被初始化为 0;而对于局部变量,其值是未定义的,包含随机…...

在线地图支持天地图和腾讯地图,仪表板和数据大屏支持发布功能,DataEase开源BI工具v2.10.7 LTS版本发布
2025年4月11日,人人可用的开源BI工具DataEase正式发布v2.10.7 LTS版本。 这一版本的功能变动包括:数据源方面,Oracle数据源支持获取和查询物化视图;图表方面,在线地图支持天地图、腾讯地图;新增子弹图&…...
粉末冶金齿轮学习笔记分享
有一段小段时间没有更新了,不知道小伙们有没有忘记我。最近总听到粉末冶金齿轮这个概念,花点时间来学习一下,总结一篇笔记分享给大家。废话不多说,直接开始: “粉末冶金”是一种制造工艺,包括在高压下压实…...
Retina:部署在神经硬件的SNN眼动追踪算法
论文链接:Retina : Low-Power Eye Tracking with Event Camera and Spiking Hardware 这是一篇发表在2024CVPRW上的文章,做了三个contribution: 将SNN放在Eye Tracking任务上。提出了Ini-30数据集部署到了Spike硬件上 还是挺有趣的。但是由于…...
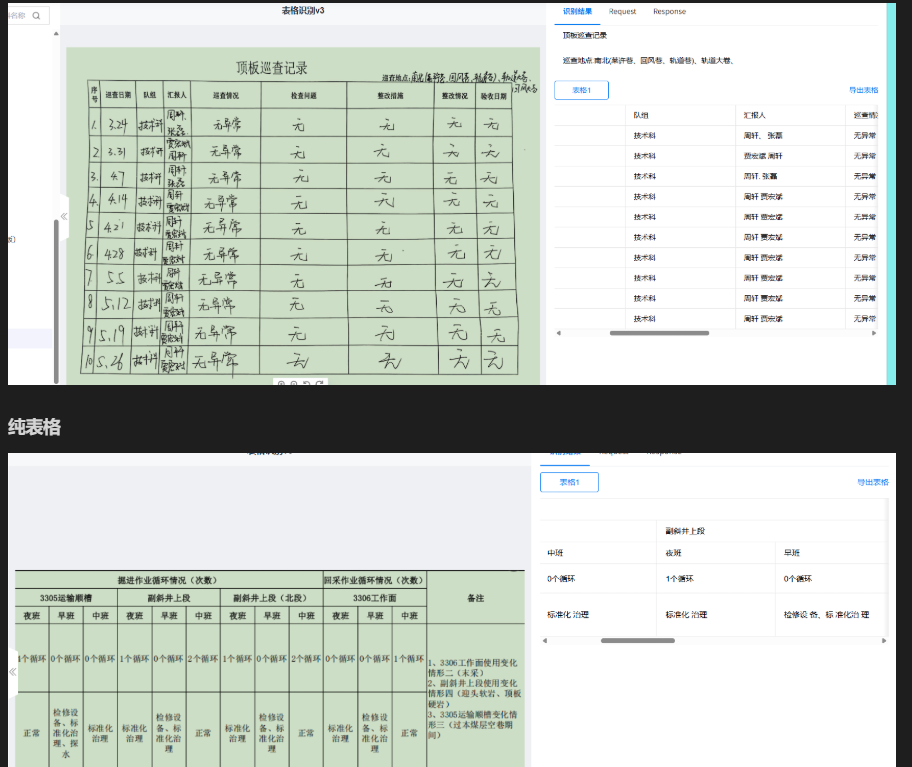
OCR API识别对比
OCR 识别DEMO OCR识别 demo 文档由来 最开始想使用百度开源的 paddlepaddle大模型 研究了几天,发现表格识别会跨行,手写识别的也不很准确。最终还是得使用现成提供的api。。 文档说明 三个体验下来 腾讯的识别度比较高,不论是手写还是识别表…...

nodejs构建项目
从零到一搭建 Node.js 框架 搭建一个 Node.js 框架是理解 Web 应用架构的绝佳方式。本指南将带您完成创建一个轻量级但功能完善的 Node.js 框架的全过程,类似于 Express 或 Koa,但规模更小,便于理解。 目录 项目初始化创建核心应用类路由系…...

flutter 桌面应用之右键菜单
在 Flutter 桌面应用开发中,context_menu 和 contextual_menu 是两款常用的右键菜单插件,各有特色。以下是对它们的对比分析: context_menu 集成方式:通过 ContextMenuArea 组件包裹目标组件,定义菜单项。掘金…...
Cygwin编译安装Acise
本文记录Windows下使用Cygwin编译安装Acise的流程。 零、环境 操作系统Windows11Visual Studio CodeVisual Studio Code 1.92.0Cygwin 一、工具及依赖 1.1 Visual Studio Code 下载并安装Visual Studio Code, 同时安装以下插件, Task Explorer Output Colorizer …...

基于STM32、HAL库的IP6525S快充协议芯片简介及驱动程序设计
一、简介: IP6525S是一款高性能的同步降压DC-DC转换器芯片,具有以下特点: 输入电压范围:4.5V至32V 输出电压范围:0.8V至30V 最大输出电流:5A 效率高达95% 可编程开关频率(100kHz-1MHz) 支持PWM和PFM模式 内置过流保护、过温保护等功能 该芯片常用于工业控制、通信设备…...

RabbitMQ惰性队列的工作原理、消息持久化机制、同步刷盘的概念、延迟插件的使用方法
惰性队列工作原理 惰性队列通过尽可能多地将消息存储到磁盘上来减少内存的使用。与传统队列相比,惰性队列不会主动将消息加载到内存中,而是尽量让消息停留在磁盘上,从而降低内存占用。尽管如此,它并不保证所有操作都是同步写入磁…...

MySQL与Oracle深度对比
MySQL与Oracle深度对比:数据类型与SQL差异 一、数据类型差异 1. 数值类型对比 数据类型MySQLOracle整数TINYINT, SMALLINT, MEDIUMINT, INT, BIGINTNUMBER(精度) 或直接INT(内部仍为NUMBER)小数DECIMAL(p,s), FLOAT, DOUBLENUMBER(p,s), FLOAT, BINARY_FLOAT, BI…...

【Leetcode 每日一题】1922. 统计好数字的数目
问题背景 我们称一个数字字符串是 好数字 当它满足(下标从 0 0 0 开始)偶数 下标处的数字为 偶数 且 奇数 下标处的数字为 质数 ( 2 , 3 , 5 (2, \ 3, \ 5 (2, 3, 5 或 7 ) 7) 7)。 比方说,“2582” 是好数字,因为偶数下标处…...

pyqtgraph.opengl.items.GLSurfacePlotItem.GLSurfacePlotItem 报了一个错
1. 需求是这个样子的 有一个 pyqtgraph.opengl.GLViewWidget ,在应用启动时存在QMainWindow中,即父对象是QMainWindow,当业务需要时,修改它的父对象变为一个QDialog,可以让它从QMainWindow中弹出显示在QDialog里&#…...
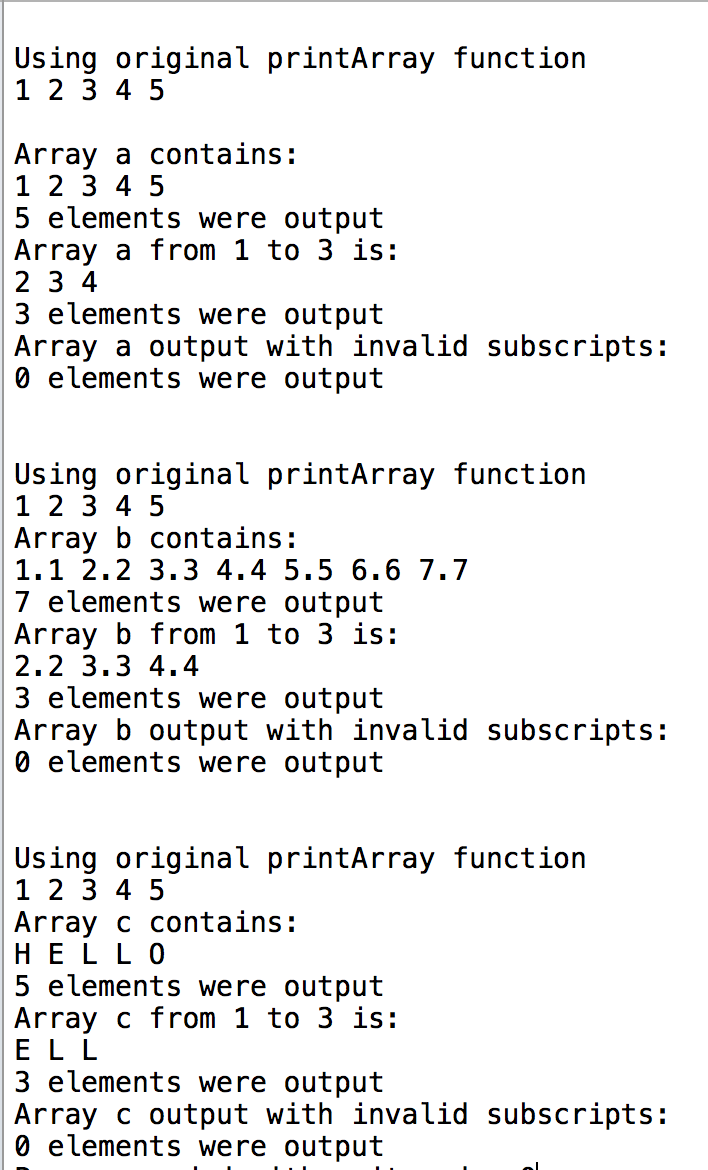
【C++初学】课后作业汇总复习(六) 函数模板
1、函数模板 思考:如果重载的函数,其解决问题的逻辑是一致的、函数体语句相同,只是处理的数据类型不同,那么写多个相同的函数体,是重复劳动,而且还可能因为代码的冗余造成不一致性。 解决:使用…...

【第16届蓝桥杯C++C组】--- 数位倍数
Hello呀,小伙伴们,第16届蓝桥杯也完美结束了,无论大家考的如何,都要放平心态,今年我刚上大一,也第一次参加蓝桥杯,刷的算法题也只有200来道,但是还是考的不咋滴,但是拿不…...

ASP.NET Core 性能优化:客户端响应缓存
文章目录 前言一、什么是缓存二、客户端缓存核心机制:HTTP缓存头1)使用[ResponseCache]属性(推荐)2)预定义缓存配置(CacheProfile)3)手动设置HTTP头4)缓存验证机制&#…...
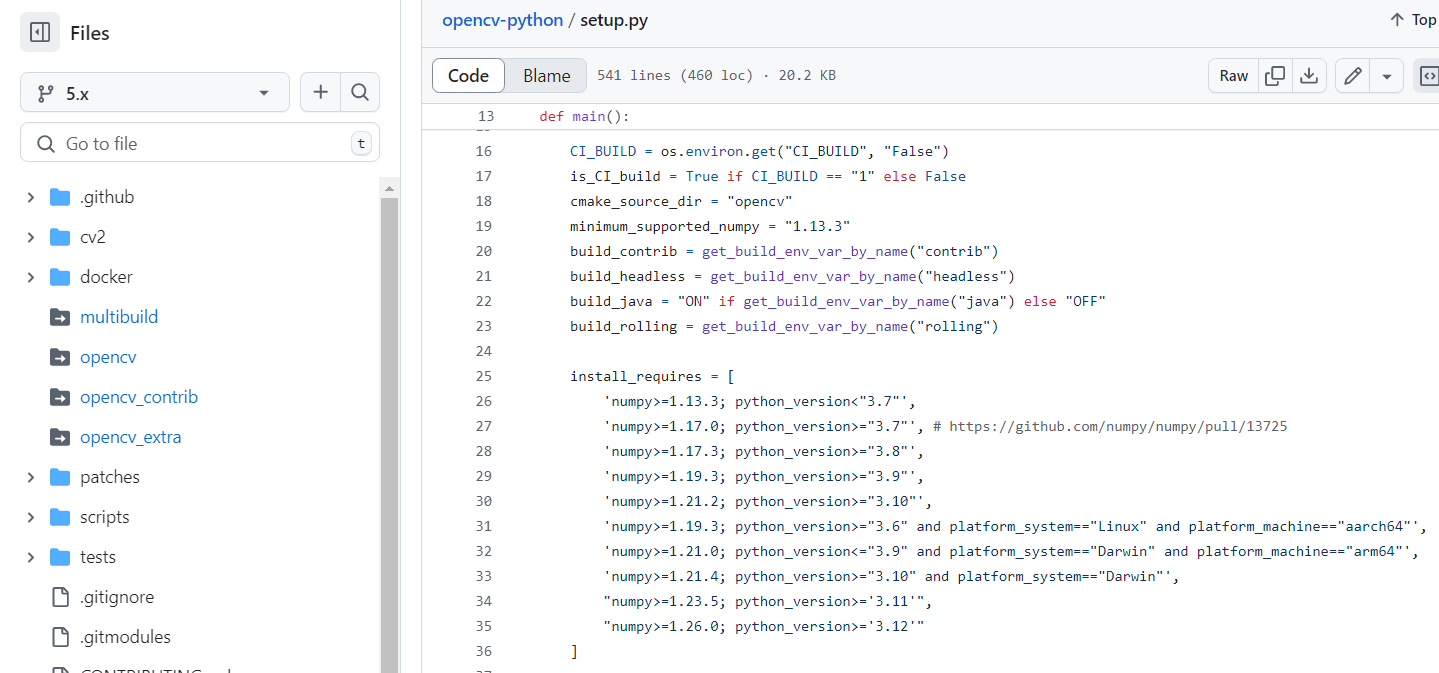
Numpy和OpenCV库匹配查询,安装OpenCV ABI错误
文章目录 地址opencv-python:4.x版本的对应numpyopencv-python:5.x版本的对应numpy方法2 ps:装个opencv遇到ABI错误无语了,翻了官网,github文档啥都没,记录下 地址 opencv-python:4.x版本的对应…...
)
全球变暖(蓝桥杯 2018 年第九届省赛)
题目描述 你有一张某海域 NN 像素的照片,. 表示海洋、 # 表示陆地,如下所示: ....... .##.... .##.... ....##. ..####. ...###. .......其中 "上下左右" 四个方向上连在一起的一片陆地组成一座岛屿。例如上图就有 2 座岛屿。 由…...
ubuntu18.04安装miniforge3
1.下载安装文件 略(注:从同事哪里拖来的安装包) 2.修改安装文件权限 chmod x Miniforge3-Linux-x86_64.sh 3.将它安装到指定位置 micromamba activate /home/xxx/fxp/fromDukto/miniforge3 4.激活 /home/xxx/fxp/fromDukto/miniforge3…...

高并发短信系统设计:基于SharingJDBC的分库分表、大数据同步与实时计算方案
高并发短信系统设计:基于SharingJDBC的分库分表、大数据同步与实时计算方案 一、概述 在当今互联网应用中,短信服务是极为重要的一环。面对每天发送2000万条短信的需求,我们需要一个能够处理海量数据(一年下来达到数千万亿级别&…...

OceanBase企业版集群部署:oatcli命令行方式
OceanBase企业版集群部署:oatcli命令行方式 安装包准备服务器准备最低资源配置是否部署ODP组件?仲裁服务器 服务器配置操作系统内核参数BIOS设置磁盘挂载网卡设置 安装OAT部署工具初始化OBServer服务器使用oatcli部署三副本集群安装OceanBase软件初始化O…...