AI与无人驾驶汽车:如何通过机器学习提升自动驾驶系统的安全性?
引言
想象一下,在高速公路上,一辆无人驾驶汽车正平稳行驶。突然,前方的车辆紧急刹车,而旁边车道有一辆摩托车正快速接近。在这千钧一发的瞬间,自动驾驶系统迅速分析路况,判断最安全的避险方案,精准调整方向和速度,成功避免了一场可能的碰撞。这一切的背后,依靠的是强大的人工智能(AI)和机器学习技术。
近年来,无人驾驶汽车正从概念走向现实,许多公司已经在实际道路上测试自动驾驶系统。然而,尽管自动驾驶技术取得了巨大进步,安全性仍然是推广普及的最大挑战。复杂的交通环境、突发状况以及感知系统的局限性,使得自动驾驶系统必须具备更高级的智能,以保证行车安全。
那么,机器学习如何提升自动驾驶系统的安全性? 本文将探讨AI如何优化自动驾驶汽车的感知、决策和应对能力,从而降低事故风险,让无人驾驶真正走向安全可控的未来。
一、自动驾驶系统的安全性挑战
尽管自动驾驶技术发展迅速,但在现实环境中,确保车辆安全仍面临诸多挑战。从复杂的道路环境到潜在的网络攻击,自动驾驶系统需要应对一系列影响安全的因素。以下是主要的安全性挑战:

1、复杂多变的道路环境
自动驾驶汽车需要在不同的场景下运行,例如繁忙的城市道路、高速公路、乡村小道,甚至恶劣天气条件(大雨、大雪、雾霾)。这些环境中的行人、非机动车、突发事件等因素增加了系统的感知和决策难度。例如,在雾天,摄像头可能难以捕捉清晰的路况信息,而传统传感器可能会产生误判。
2、传感器感知与数据处理的局限性
自动驾驶依赖摄像头、雷达、激光雷达(LiDAR)等传感器获取周围环境的数据。然而,这些传感器可能受到光照、天气、障碍物等因素的影响,导致数据不完整或错误。例如,在强烈逆光下,摄像头可能无法识别前方行人,或者在大雨中,激光雷达的测距精度可能下降。传感器融合技术虽然能一定程度上弥补单个传感器的局限性,但仍然无法完全消除误差。
3、复杂决策与突发情况应对
即使系统能准确感知环境,如何决策也是一大难题。例如,当遇到突然闯红灯的行人,或者前方有障碍物但后方有快速接近的车辆时,系统该如何反应?目前的自动驾驶系统依赖预先设定的算法和规则,但面对真正复杂的路况时,仍可能出现错误决策。
4、网络安全与黑客攻击风险
自动驾驶汽车依赖车载计算机和云端数据进行实时计算和通信,这也意味着它们可能成为黑客攻击的目标。如果黑客入侵车辆控制系统,他们可以远程控制刹车、方向盘等关键部件,导致严重事故。此外,自动驾驶系统在与云端通信时,可能会遭遇数据窃取或篡改,影响行车安全。
5、伦理与法律问题
无人驾驶汽车在极端情况下该如何做出决定?如果必须在保护乘客和避免伤害行人之间做出选择,系统应该优先考虑谁?这类伦理问题至今没有统一答案。此外,各国的自动驾驶法规仍在完善中,不同地区的法律要求不同,可能会影响自动驾驶技术的普及。
总结
自动驾驶的安全性挑战主要来自复杂环境、传感器局限、决策难度、网络安全和法律伦理问题。要实现真正安全的自动驾驶,必须通过更先进的AI和机器学习技术,不断优化感知、预测和决策能力,从而减少事故风险,提高行车安全性。
二、机器学习在自动驾驶安全中的应用
为了提高自动驾驶汽车的安全性,机器学习正在从多个层面优化系统的感知、决策和控制能力。通过深度学习、强化学习和预测建模等技术,AI可以帮助车辆更准确地感知环境、更智能地制定驾驶策略,并更有效地应对突发状况。以下是几个关键应用领域:
1、计算机视觉与感知能力增强
自动驾驶汽车依靠摄像头、雷达和激光雷达(LiDAR)等传感器获取周围环境的数据。然而,单个传感器的数据可能存在局限性,例如摄像头在夜间或强光环境下可能失效,而激光雷达在雨雪天气中可能受到干扰。
机器学习如何优化?
深度学习可用于图像处理,提高物体识别的准确性。例如,卷积神经网络(CNN)可以帮助自动驾驶汽车精准识别行人、红绿灯、交通标志和其他车辆。
多传感器融合技术通过机器学习整合摄像头、雷达和LiDAR的数据,提高对环境的感知精度。例如,当摄像头因逆光无法识别行人时,LiDAR可以提供精确的深度信息,从而弥补盲点。
实时目标检测算法(如YOLO或Faster R-CNN)可以快速识别并跟踪行驶环境中的动态物体,例如突然横穿马路的行人或变道的车辆。
2、强化学习优化驾驶策略
除了感知环境,自动驾驶汽车还需要做出决策,例如如何变道、何时刹车、如何应对突发状况。传统的规则驱动方法(基于预设规则的决策)在复杂环境下容易失效,而强化学习(RL, Reinforcement Learning)可以帮助系统不断优化驾驶策略。
机器学习如何优化?
仿真训练:利用强化学习,AI可以在模拟环境中反复训练,例如在数百万次的模拟驾驶中学习如何在高速公路上并线、如何应对突然刹车的前车等。
自适应决策:基于深度强化学习(Deep Q-Network, DQN 或 Actor-Critic 方法),自动驾驶系统可以不断调整驾驶策略,使其更符合复杂路况的要求。
学习最优避险策略:例如,在Waymo的自动驾驶测试中,强化学习被用于训练系统如何在应对突发事故时找到最安全的应对方案。
3、预测性分析与行为建模
在真实驾驶环境中,除了感知当前情况,自动驾驶系统还需要预测其他道路使用者的行为,以做出更安全的决策。例如,识别前方车辆是否可能突然变道,或者预测行人是否会横穿马路。
机器学习如何优化?
时序预测模型(如LSTM、Transformer)可以基于历史数据预测行人或车辆的运动轨迹。例如,系统可以识别出一名行人正在靠近人行横道,并提前减速,以防止突然横穿的风险。
概率建模(如高斯混合模型)可以计算不同行为发生的概率,例如前方车辆是否会突然变道,从而帮助自动驾驶汽车做出最佳决策。
社交行为建模可以让AI理解不同场景下的驾驶行为。例如,在美国,司机可能会在黄色信号灯时加速通过,而在欧洲,司机更倾向于提前减速停下。AI可以根据区域和驾驶习惯调整策略,提高安全性。
4、异常检测与网络安全防护
自动驾驶系统不仅需要应对物理环境的挑战,还需要防范潜在的网络攻击和系统异常。例如,如果黑客入侵自动驾驶汽车,他们可能会篡改系统数据,导致错误决策。
机器学习如何优化?
异常检测模型(如Autoencoder、Isolation Forest)可以实时监测传感器和系统数据,识别异常情况。例如,如果某个传感器突然提供异常数据,系统可以立即切换到备用方案,防止错误传播。
AI驱动的入侵检测系统(IDS)可以分析网络流量,检测是否存在恶意攻击行为,例如黑客试图远程控制车辆或篡改导航数据。
区块链与分布式信任机制结合AI,可以确保车辆与云端之间的数据通信安全,防止篡改和数据泄露。
总结
机器学习技术正从多个层面优化自动驾驶系统的安全性:
✅ 计算机视觉 提高车辆对环境的感知能力,减少误判。
✅ 强化学习 让车辆能够适应不同路况,并在突发情况下做出最佳决策。
✅ 行为预测 让AI能够提前预判行人和其他车辆的行为,提高安全性。
✅ 网络安全防护 保护自动驾驶系统免受网络攻击,确保数据安全。
随着机器学习技术的不断进步,自动驾驶汽车将变得更加智能和安全,推动无人驾驶真正走向成熟。
三、真实案例:AI如何提升无人驾驶的安全性
在全球范围内,许多科技公司正在利用人工智能(AI)和机器学习技术优化自动驾驶系统,以提高车辆的安全性。以下几个真实案例展示了AI如何在不同环境和场景中提升无人驾驶的安全性。

1、特斯拉 FSD(Full Self-Driving):基于神经网络的端到端驾驶
AI应用:深度学习 + 端到端神经网络
特斯拉的自动驾驶系统FSD采用端到端神经网络(End-to-End Neural Networks),可以实时分析行车环境并做出驾驶决策。FSD利用海量驾驶数据进行不断迭代学习,使车辆能够适应复杂的交通环境。例如,在面对行人突然横穿、前方车辆突然刹车或狭窄道路会车等情况时,FSD能够依靠AI快速决策,确保安全。
安全性提升点:
✅ 通过机器学习不断优化驾驶策略,减少因人为误判导致的事故。
✅ 依靠AI分析上百万辆特斯拉车主提供的数据,持续优化识别能力。
✅ 利用计算机视觉技术,提高对红绿灯、路标、障碍物等的识别精度。
2、Waymo:多传感器融合与行为预测
AI应用:深度学习 + 行为预测建模
Waymo(谷歌母公司Alphabet旗下的自动驾驶公司)开发的无人驾驶系统采用多传感器融合技术,结合深度学习和预测性分析,能够提前预判其他车辆和行人的行为。例如,当Waymo的自动驾驶汽车检测到一名行人站在人行道边时,系统会分析行人的身体姿态、视线方向、历史行为等因素,判断其是否可能横穿马路,并提前做出反应。
安全性提升点:
✅ 采用激光雷达+摄像头+雷达的多模态感知系统,提高环境识别精度。
✅ 通过AI预测模型分析行人、车辆的意图,提前做出应对。
✅ 运行数百万公里的仿真训练,优化驾驶策略,应对复杂路况。
3、Mobileye:计算机视觉赋能自动驾驶
AI应用:计算机视觉 + 深度学习
Mobileye(英特尔旗下的自动驾驶公司)专注于计算机视觉技术,为自动驾驶汽车提供高精度视觉感知系统。其AI芯片EyeQ系列能够利用深度学习进行实时图像处理,使车辆能够精准识别红绿灯、车道标线、交通标志、行人和障碍物,即使在低光或恶劣天气条件下也能保持高识别率。
安全性提升点:
✅ 通过深度学习提高摄像头识别能力,使车辆“看”得更清楚。
✅ 采用高精度地图(REM)技术,让车辆可以通过众包数据优化路线规划。
✅ 结合雷达与视觉融合算法,提高感知系统的稳定性和冗余性。
4、萝卜快跑:L4级自动驾驶在复杂城市环境的应用
AI应用:深度学习 + 强化学习 + 5G远程控制
萝卜快跑是百度Apollo推出的L4级自动驾驶出租车服务,已在中国武汉等多个城市实现大规模落地运营。作为全球领先的Robotaxi运营商之一,萝卜快跑依托百度Apollo强大的AI算法和车路协同技术,提升复杂城市环境中的驾驶安全性。例如,在高峰期复杂的交叉路口,萝卜快跑的自动驾驶系统可以利用深度学习结合V2X(车路协同通信),精准感知红绿灯状态、行人流量、非机动车动态等信息,从而做出最安全的驾驶决策。
安全性提升点:
✅ 依托百度Apollo AI算法,优化感知、预测和规划,提高安全性。
✅ 结合5G远程接管技术,确保在特殊情况下可以由远程安全员介入。
✅ 通过车路协同(V2X),实时获取红绿灯信号、行人和车辆的位置信息,避免碰撞风险。
总结
从特斯拉的FSD,到Waymo的预测性分析,再到Mobileye的计算机视觉和武汉萝卜快跑的车路协同,每个案例都展示了AI如何优化自动驾驶系统的安全性。未来,随着深度学习、强化学习、V2X车路协同等技术的进一步发展,无人驾驶汽车将在更复杂的环境中提供更安全的出行体验。
四、未来展望与挑战
随着人工智能(AI)和机器学习技术的不断发展,自动驾驶汽车正朝着更智能、更安全的方向演进。然而,要让无人驾驶真正普及并达到理想状态,仍然面临许多技术和现实挑战。
未来展望
1、更强大的AI决策能力
未来的自动驾驶系统将依靠更先进的深度学习和强化学习算法,提高车辆在复杂交通环境中的决策能力。例如,多模态学习可以结合视觉、雷达、语义理解等多种数据源,使自动驾驶更接近人类驾驶员的直觉判断能力。
AI突破点:
✅ 自适应学习:AI能基于不同地区和驾驶习惯自动调整驾驶策略,比如适应国内外不同的交通规则和驾驶风格。
✅ 端到端AI系统:未来的自动驾驶可能完全由神经网络端到端控制,而非依赖规则编码,提高系统自主决策能力。
2、车路协同(V2X)与5G赋能
当前的自动驾驶系统主要依赖车辆自身的传感器,但未来,V2X(Vehicle-to-Everything,车路协同)技术将发挥关键作用,使车辆能够与其他车辆(V2V)、基础设施(V2I)、行人(V2P)甚至云端(V2C)实时通信。
AI突破点:
✅ 更精准的环境感知:比如,在路口,车辆可以提前获取红绿灯变更信息或前方视线盲区的来车信息,减少事故风险。
✅ 远程控制+云计算:结合5G网络,未来可能实现云端AI计算+远程接管,提升系统安全性。
3、无人驾驶商业化落地
目前,像特斯拉FSD、Waymo、萝卜快跑等已经在进行大规模测试,但要真正普及,仍然需要解决成本、法规和用户接受度等问题。未来,我们可能会看到更多自动驾驶出租车、无人配送车、无人巴士等在全球范围内投入运营。
AI突破点:
✅ 低成本AI芯片:未来自动驾驶需要更便宜、更高效的计算芯片,让智能驾驶普及到更多车型。
✅ 智慧城市支持:政府将推动智慧交通基础设施建设,例如智能红绿灯、智能道路标识,以适应无人驾驶技术。
挑战与难点
1、复杂交通环境仍是挑战
尽管AI在自动驾驶感知和决策方面取得巨大进步,但极端天气、突发情况、非标准化道路仍是挑战。例如:
大雾、大雨等恶劣天气,可能影响摄像头和雷达的有效性。
老旧或模糊不清的道路标识,可能导致车辆误判。
行人、非机动车等不确定性因素,仍然需要AI提升预判能力。
2、伦理与法律问题仍需突破
自动驾驶引发的伦理问题仍未有统一答案。例如:
当事故无法避免时,AI应该优先保护乘客还是行人?
如果无人驾驶汽车发生事故,责任归属应该如何界定?
此外,各国的自动驾驶法律尚不统一。例如,美国某些州允许L4级自动驾驶,但在其他国家可能仍然受限。未来需要全球法规协调,以推动自动驾驶技术的普及。
3、网络安全威胁不容忽视
自动驾驶汽车依赖大量传感器数据、云计算和V2X通信,这使其容易成为黑客攻击目标。
黑客可能通过网络攻击劫持车辆,导致系统瘫痪或误判。
数据泄露风险:自动驾驶收集大量用户数据,如何保护隐私仍然是挑战。
未来,AI安全机制需要不断升级,例如:
✅ AI驱动的网络安全防护,实时检测并防止黑客攻击。
✅ 区块链+分布式安全系统,保证数据传输和存储的安全性。
总结
未来的自动驾驶发展方向将包括更强大的AI算法、更广泛的V2X应用、更成熟的商业化模式,但仍然需要克服复杂环境、法律伦理和网络安全等挑战。随着技术进步和政策支持,无人驾驶终将成为更安全、高效的出行方式,让未来交通更加智能和可控。
结论
人工智能与机器学习正在深刻改变自动驾驶技术,使无人驾驶汽车在感知、决策和控制等方面不断进化。通过计算机视觉、多传感器融合、强化学习和V2X车路协同等技术,AI大幅提升了自动驾驶的安全性,使其逐步走向成熟。
尽管目前仍面临复杂交通环境、法律法规和网络安全等挑战,但技术的持续突破正在推动无人驾驶走向大规模商业化应用。从特斯拉FSD、Waymo到武汉萝卜快跑,全球各地的自动驾驶项目正加速落地,展示出AI在提升交通安全和效率方面的巨大潜力。
未来,随着AI算法的优化、智慧交通基础设施的完善以及政策法规的逐步放开,自动驾驶汽车将成为城市出行的重要组成部分。虽然全面普及仍需时间,但可以预见,AI驱动的无人驾驶将为全球交通安全和出行方式带来革命性变革,推动人类进入更加智能、高效、安全的交通新时代。
相关文章:
AI与无人驾驶汽车:如何通过机器学习提升自动驾驶系统的安全性?
引言 想象一下,在高速公路上,一辆无人驾驶汽车正平稳行驶。突然,前方的车辆紧急刹车,而旁边车道有一辆摩托车正快速接近。在这千钧一发的瞬间,自动驾驶系统迅速分析路况,判断最安全的避险方案,精…...
第5篇:Linux程序访问控制FPGA端LEDR<三>
Q:如何具体设计.c程序代码访问控制FPGA端外设? A:以控制DE1-SoC开发板的LEDR为例的Linux .C程序代码。头文件fcntl.h和sys/mman.h用于使用/dev/mem文件,以及mmap和munmap内核函数;address_map_arm.h指定了DE1-SoC_Com…...

城市应急安防系统EasyCVR视频融合平台:如何实现多源视频资源高效汇聚与应急指挥协同
一、方案背景 1)项目背景 在当今数字化时代,随着信息技术的飞速发展,视频监控和应急指挥系统在公共安全、城市应急等领域的重要性日益凸显。尤其是在关键场所,高效的视频资源整合与传输能力对于应对突发公共事件、实现快速精准的…...

主流程序员接单平台的分类整理与分析
一、主流推荐平台 1.程序员客栈 特点:国内知名度高,需求池模式自动匹配项目,项目经理介入协调争议,流程规范。 优势:适合新手到资深开发者,资金托管安全性高,交易纠纷处理专业。 不足&…...
【笔记ing】AI大模型-03深度学习基础理论
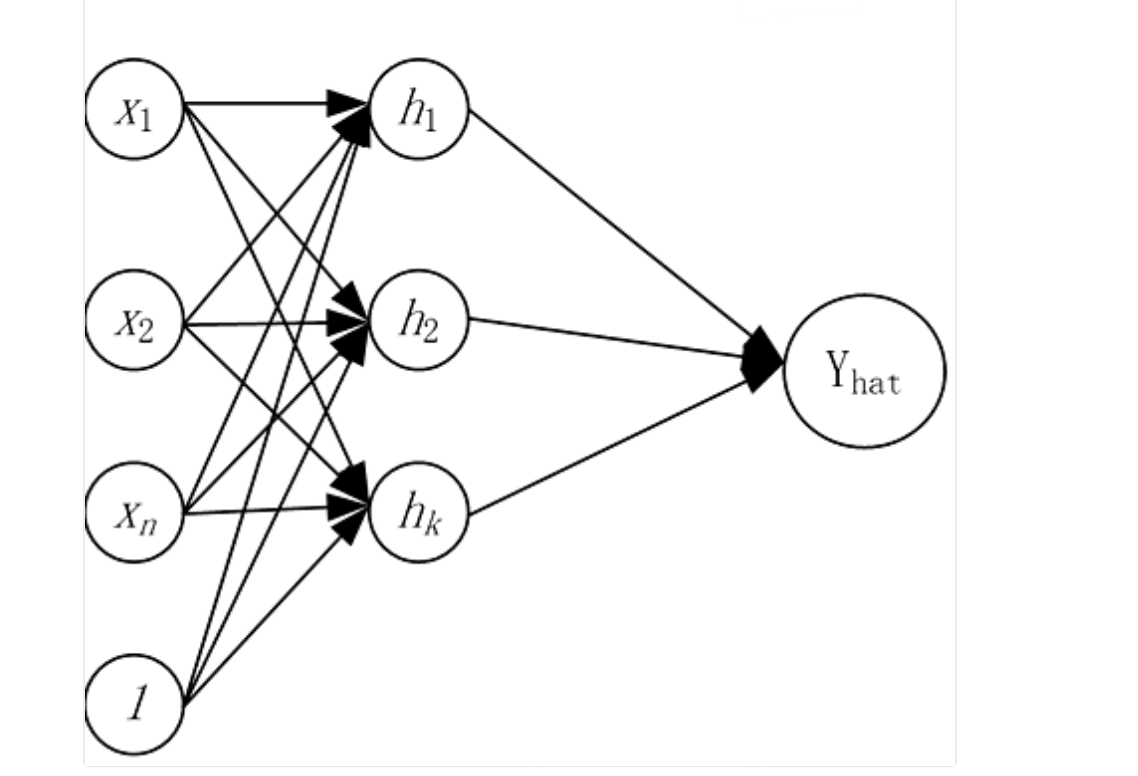
神经网络:A neural network is a network or circuit of neurons,or in a modern sense,an artificial neural network,composed of artificial neurons or nodes.神经网络是神经元的网络或回路,或者在现在意义上来说,是一个由人工神经元或节…...

Hutool工具包中`copyProperties`和`toBean`的区别
前言 在Java开发中,对象转换是一项常见且重要的操作。Hutool作为一个功能强大的Java工具包,提供了copyProperties和toBean这两个实用的方法来帮助我们进行对象转换。然而,很多开发者对这两个方法的区别和使用场景并不十分清楚。 一、Hutool…...

高德地图 JS-SDK 实现教程
高德地图 JS-SDK 实现教程:定位、地图选点、地址解析等 适用地点选择、地址显示、表单填写等场景,全面支持移动端、手机浏览器和 PC端环境 一、创建应用&Key 前端(JS-SDK、地图组件) 登陆 高德开放平台创建应用,…...

07软件测试需求分析案例-修改用户信息
修改用户信息是后台管理菜单的一个功能模块,只有admin才有修改权限。包括查询用户名进行显示用户相关信息,并且修改用户相关信息的功能。 1.1 通读文档 通读需求规格说明书是提取信息,提出问题,输出具有逻辑、规则、流程的业务…...

分层对象模型:PO、DTO、VO、BO定义区别与使用场景
目录 前言 PO(持久化对象) DTO(数据传输对象) VO(视图对象) BO(业务对象) 关键区别总结 典型应用场景 为什么要分层设计 工具支持 前言 在开发中,我们经常遇到…...
设计模式 --- 状态模式
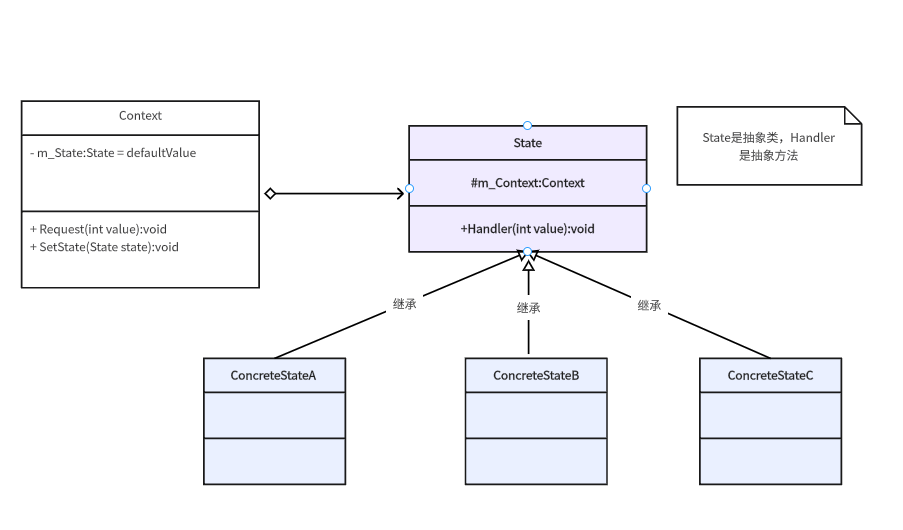
状态模式是一种行为型设计模式,允许对象在内部状态改变时动态改变其行为,使对象的行为看起来像是改变了。该模式通过将状态逻辑拆分为独立类,消除复杂的条件分支语句,提升代码的可维护性和扩展性。 状态模式的…...

Java多态课堂练习题
Java多态课堂练习题 题目:动物乐园的多态展示 背景设定: 设计一个动物乐园程序,展示不同类型动物的行为特点,要求使用多态特性实现。 1. 基础类设计(已给出部分代码) // 基类:动物 abstract…...

SAP系统中的借货
问题:什么是借贷? 解答:记账符号反映的是各种经济业务数量的增加和减少。 二:怎么区分借贷增减? 解答:“借”和“贷”何时为增加、何时为减少,必须结合账户的具体性质才能准确说明…...

深入剖析Go Channel:从底层原理到高阶避坑指南|Go语言进阶(5)
文章目录 引言channel的底层数据结构channel操作原理发送操作(ch <- data)接收操作(<-ch) 常见陷阱及避坑指南1. 死锁问题2. 关闭channel的错误方式3. 内存泄漏4. nil channel特性5. 性能考量 最佳实践总结 引言 Channel是Go语言实现CSP并发模型的核心机制,提…...
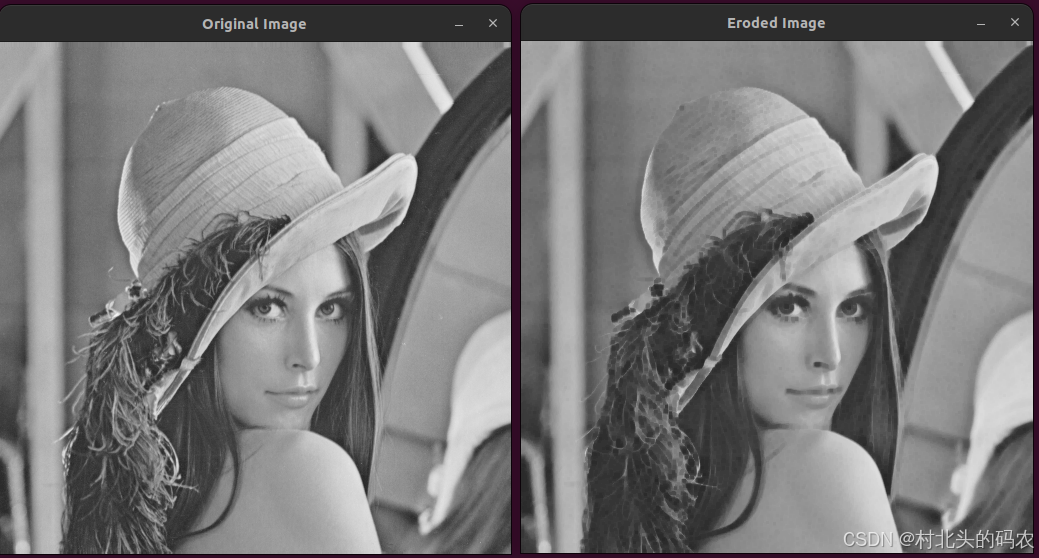
OpenCV 图形API(31)图像滤波-----3x3 腐蚀操作函数erode3x3()
操作系统:ubuntu22.04 OpenCV版本:OpenCV4.9 IDE:Visual Studio Code 编程语言:C11 算法描述 使用3x3矩形结构元素腐蚀图像。 该函数通过使用中心作为锚点的3x3矩形结构元素来腐蚀源图像。腐蚀操作可以应用多次(迭代࿰…...

5.5 GitHub数据秒级分析核心揭秘:三层提示工程架构设计解析
GitHub Sentinel Agent 分析报告功能设计与实现 关键词:GitHub 数据分析, 提示工程设计, Pull Request 分析, Issues 跟踪, 竞品对比 项目进展报告生成功能设计 报告生成模块是 GitHub Sentinel 的核心功能,通过三层嵌套式提示工程架构实现深度分析: #mermaid-svg-vdHRUan…...

【Java学习笔记】Java初级阶段代码规范
Java 初级阶段代码规范 1. 类、方法的注释,要以 javadoc 的方式来写。 2. 非 Java Doc 的注释,往往是给代码的维护者看的,着重告读者为什么这样写,如何修改,注重什么问题等 3. 使用 tab 操作,实现缩进&am…...
AI Agent开发大全第二十八课-MCP实现本地命令调用怎么做的?
开篇 MCP很强大,Client端一旦实现了稳定的连接和执行流程后任Server端随意改动都可兼容,这就是热插拨功能。 如果我们仅仅满足于MCP查点网上资料、读点图片即文字型的功能肯定是不能充分发挥MCP的强大之处的,正应了Google以及Anthropic最近的研究报告上说的:不要再在chat…...

macOS 上使用 Homebrew 安装和配置 frp 客户端
macOS 上使用 Homebrew 安装和配置 frp 客户端 (frpc) 指南 frp (Fast Reverse Proxy) 是一款高性能的反向代理应用,常用于内网穿透。本文将介绍在 macOS 上使用 Homebrew 安装 frpc,并进行配置和管理。 一、安装 frpc 使用 Homebrew 安装(…...

为 docker 拉取镜像配置代理
为 Docker 配置代理,有 两个层面 的操作:(1) Docker 守护进程(用于拉取镜像等操作),(2) Docker 容器内部(容器内应用的网络流量)。 我们这篇文章着重于前者,以下是详细步骤ÿ…...

A2A协议实现详解及示例
A2A协议概述 A2A (Agent2Agent) 是Google推出的一个开放协议,旨在使AI智能体能够安全地相互通信和协作。该协议打破了孤立智能体系统之间的壁垒,实现了复杂的跨应用自动化。[1] A2A协议的核心目标是让不同的AI代理能够相互通信、安全地交换信息以及在各…...
)
TDengine 语言连接器(Node.js)
简介 tdengine/websocket 是 TDengine 的官方 Node.js 语言连接器。Node.js 开发人员可以通过它开发存取 TDengine 数据库的应用软件。 Node.js 连接器源码托管在 GitHub。 Node.js 版本兼容性 支持 Node.js 14 及以上版本。 支持的平台 支持所有能运行 Node.js 的平台。 …...

ESP-IDF 开发框架:探索ESP32的强大底层世界
文章总结(帮你们节约时间) 介绍了ESP-IDF作为乐鑫ESP32系列芯片的官方开发框架。对比了Arduino、MicroPython和ESP-IDF三种ESP32开发方式的优缺点。详细讲解了ESP-IDF的核心特性和多层架构设计。展示了ESP-IDF的开发流程和应用场景。 你是否曾经好奇过…...
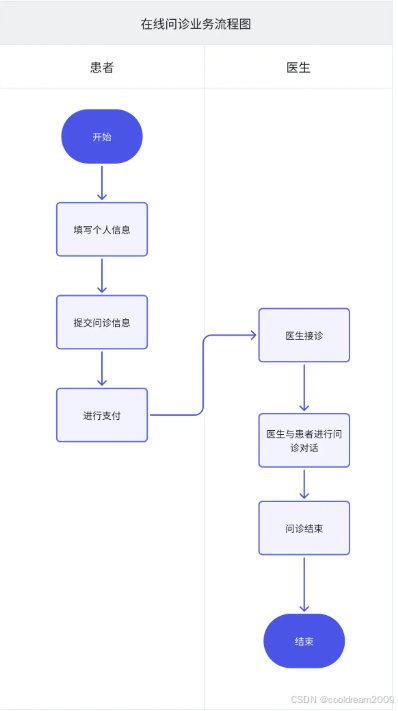
活动图与流程图的区别与联系:深入理解两种建模工具
目录 前言1. 活动图概述1.1 活动图的定义1.2 活动图的基本构成要素1.3 活动图的应用场景 2. 流程图概述2.1 流程图的定义2.2 流程图的基本构成要素2.3 流程图的应用场景 3. 活动图与流程图的联系4. 活动图与流程图的区别4.1 所属体系不同4.2 表达能力差异4.3 使用目的与语境4.4…...
)
如何在 Java 中对 PDF 文件进行数字签名(教程)
Java 本身并不原生支持 PDF 文件,因此若要对 PDF 进行数字签名,您需要使用一些专用的软件。本教程将演示如何使用 JPedal PDF 库来对 PDF 文件进行数字签名。 步骤: • 下载 JPedal 并将 Jar 文件添加到项目中 • 创建一个 PKCS#12 密…...
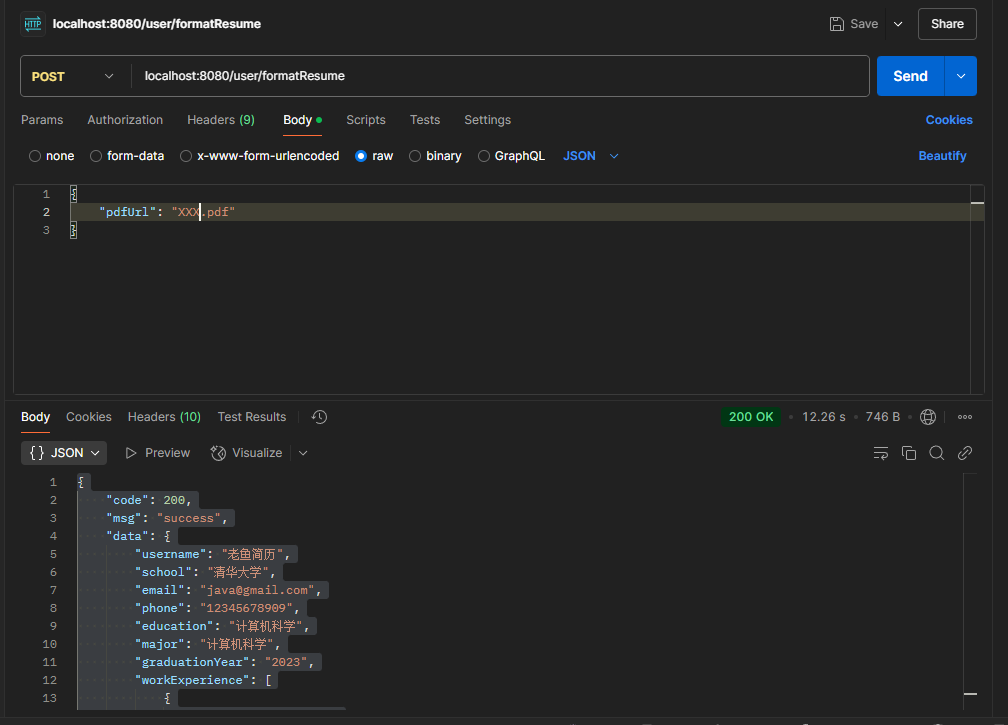
图片文本识别OCR+DeepSeekapi实现提取图片关键信息
用到的技术: 通过腾讯OCR文字识别,deepseek的api实现 目录 需求分析: 文字识别(OCR)具体实现步骤 起步工作 代码编写 deepseek整合消息,返回文本关键信息 起步工作 编写工具类 具体调用实现 具体…...
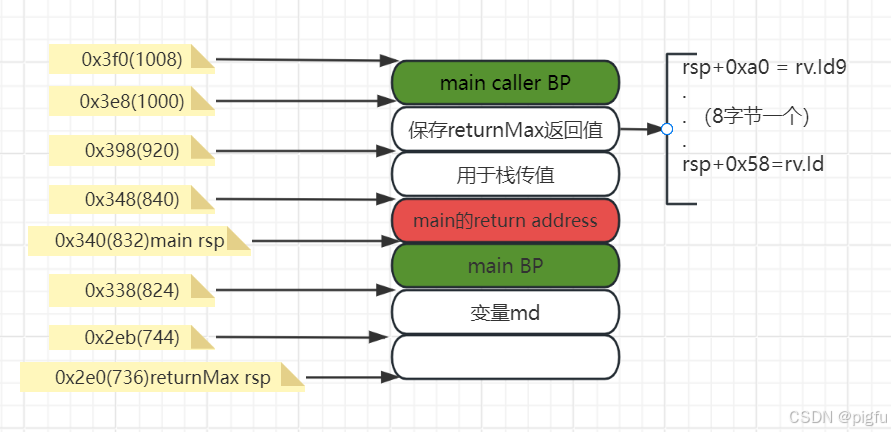
go 通过汇编分析函数传参与返回值机制
文章目录 概要一、前置知识二、汇编分析2.1、示例2.2、汇编2.2.1、 寄存器传值的汇编2.2.2、 栈内存传值的汇编 三、拓展3.1 了解go中的Duff’s Device3.2 go tool compile3.2 call 0x46dc70 & call 0x46dfda 概要 在上一篇文章中,我们研究了go函数调用时的栈布…...
解决Ubuntu Desktop 24.04 VMware中安装后不能全屏显示,只能居中的问题
Ubuntu Desktop 24.04 VMware中安装后不能全屏显示,只能居中。 sudo apt-get install open-vm-tools sudo apt-get install open-vm*...
【笔记ing】AI大模型-04逻辑回归模型
一个神经网络结构,其中的一个神经网络层,本质就是一个逻辑回归模型 深度神经网络的本质就是多层逻辑回归模型互相连接或采用一定的特殊连接的方式连接在一起构成的。其中每一个层本质就是一个逻辑回归模型。 逻辑回归模型基本原理 逻辑回归࿰…...

分布式ID生成方案的深度解析与Java实现
在分布式系统中,生成全局唯一的ID是一项核心需求,广泛应用于订单编号、用户信息、日志追踪等场景。分布式ID不仅需要保证全局唯一性,还要满足高性能、高可用性以及一定的可读性要求。本文将深入探讨分布式ID的概念、设计要点、常见生成方案&a…...

AF3 ProteinDataModule类解读
AlphaFold3 protein_datamodule 模块 ProteinDataModule 类继承自 PyTorch Lightning 数据模块(LightningDataModule),负责 ProteinFlow 数据的准备、加载、拆分、变换等逻辑封装在一起,便于训练过程中的统一管理和复现。 这个类承担了 AlphaFold3 训练和评估过程中的 数据…...