波束形成(BF)从算法仿真到工程源码实现-第十节-非线性波束形成
一、概述
本节我们基于webrtc的非线性波束形成进行代码仿真,并对仿真结果进行展示和分析总结。更多资料和代码可以进入https://t.zsxq.com/qgmoN ,同时欢迎大家提出宝贵的建议,以共同探讨学习。
二、仿真代码
2.1 常量参数
% *@author : aflyingwolf
% *@date : 2025.4.15
% *@file : beamform_define_const_param.m
function beamform_param = beamform_define_const_param()beamform_param.kFftSize = 256;beamform_param.kNumFreqBins = (beamform_param.kFftSize / 2 + 1);beamform_param.kMaskTimeSmoothAlpha = 0.2;beamform_param.kMaskFrequencySmoothAlpha = 0.6;beamform_param.kCompensationGain = 0.2;beamform_param.kSpeedOfSoundMeterSeconds = 343.0;beamform_param.kBalance = 0.90;beamform_param.kBeamwidthConstant = 0.00002;beamform_param.kInterfNum = 4;beamform_param.kMaxDotProduct = 1e-6;beamform_param.kLowMeanStartHz = 125;beamform_param.kLowMeanEndHz = 400;beamform_param.kSampleRate = 16000;
end
2.2 参数初始化
% *@author : aflyingwolf
% *@date : 2025.4.15
% *@file : beamform_reset.m
function beamform_inst = beamform_reset(beamform_inst, target_direction)beamform_inst.target_angle_radians = target_direction(1);kHighMeanStartHz = 2000;kHighMeanEndHz = 3000;beamform_inst.high_mean_start_bin = floor(kHighMeanStartHz * beamform_inst.param.kFftSize / ...beamform_inst.sample_rate_hz + 0.5);beamform_inst.high_mean_end_bin = floor(kHighMeanEndHz * beamform_inst.param.kFftSize / ...beamform_inst.sample_rate_hz + 0.5);%InitInterfAnglestarget_direction_point = [cos(beamform_inst.target_angle_radians), ...sin(beamform_inst.target_angle_radians), ...0];clockwise_interf_direction_point = [cos(beamform_inst.target_angle_radians - beamform_inst.away_radians), ...sin(beamform_inst.target_angle_radians - beamform_inst.away_radians), ...0];if beamform_inst.array_sign > 0 && dot(beamform_inst.array_normal, target_direction_point) * ...dot(beamform_inst.array_normal, clockwise_interf_direction_point) >= 0beamform_inst.interf_angles_radians(1) = beamform_inst.target_angle_radians - beamform_inst.away_radians;elsebeamform_inst.interf_angles_radians(1) = beamform_inst.target_angle_radians - beamform_inst.away_radians + pi;endcounterclock_interf_direction_point = [cos(beamform_inst.target_angle_radians + beamform_inst.away_radians), ...sin(beamform_inst.target_angle_radians + beamform_inst.away_radians), ...0];if beamform_inst.array_sign > 0 && dot(beamform_inst.array_normal, target_direction_point) * ...dot(beamform_inst.array_normal, counterclock_interf_direction_point) >= 0beamform_inst.interf_angles_radians(2) = beamform_inst.target_angle_radians + beamform_inst.away_radians;elsebeamform_inst.interf_angles_radians(2) = beamform_inst.target_angle_radians + beamform_inst.away_radians - pi;end%wj add clockwise_interf_direction_point = [cos(beamform_inst.target_angle_radians - beamform_inst.away_radians2), ...sin(beamform_inst.target_angle_radians - beamform_inst.away_radians2), ...0];if beamform_inst.array_sign > 0 && dot(beamform_inst.array_normal, target_direction_point) * ...dot(beamform_inst.array_normal, clockwise_interf_direction_point) >= 0beamform_inst.interf_angles_radians(3) = beamform_inst.target_angle_radians - beamform_inst.away_radians2;elsebeamform_inst.interf_angles_radians(3) = beamform_inst.target_angle_radians - beamform_inst.away_radians2 + pi;endcounterclock_interf_direction_point = [cos(beamform_inst.target_angle_radians + beamform_inst.away_radians2), ...sin(beamform_inst.target_angle_radians + beamform_inst.away_radians2), ...0];if beamform_inst.array_sign > 0 && dot(beamform_inst.array_normal, target_direction_point) * ...dot(beamform_inst.array_normal, counterclock_interf_direction_point) >= 0beamform_inst.interf_angles_radians(4) = beamform_inst.target_angle_radians + beamform_inst.away_radians2;elsebeamform_inst.interf_angles_radians(4) = beamform_inst.target_angle_radians + beamform_inst.away_radians2 - pi;end%InitDelaySumMasksfor t = 1:1:beamform_inst.param.kNumFreqBinsfreq_in_hertz = (t-1) / beamform_inst.param.kFftSize * beamform_inst.sample_rate_hz;for k = 1:1:beamform_inst.num_input_channelsdistance = cos(beamform_inst.target_angle_radians) * beamform_inst.array_geometry(k,1) + ...sin(beamform_inst.target_angle_radians) * beamform_inst.array_geometry(k,2);phase_shift = 2.0 * pi * distance * freq_in_hertz / beamform_inst.param.kSpeedOfSoundMeterSeconds;beamform_inst.delay_sum_masks(t,k) = complex(cos(phase_shift), sin(phase_shift));endendbeamform_inst.delay_sum_masks = beamform_inst.delay_sum_masks/sqrt(beamform_inst.num_input_channels);%InitTargetCovMatsfor t = 1:1:beamform_inst.param.kNumFreqBinsbeamform_inst.target_cov_mats(t,:,:) = beamform_inst.delay_sum_masks(t,:).' * conj(beamform_inst.delay_sum_masks(t,:));xx = trace(squeeze(beamform_inst.target_cov_mats(t,:,:)));beamform_inst.target_cov_mats(t,:,:) = beamform_inst.target_cov_mats(t,:,:) / xx;end%InitInterfCovMatsfor t = 1:1:beamform_inst.param.kNumFreqBinsfor k = 1:1:beamform_inst.param.kInterfNuminterf_cov_vector = complex(zeros(1, beamform_inst.num_input_channels));freq_in_hertz = (t-1) / beamform_inst.param.kFftSize * beamform_inst.sample_rate_hz;for s = 1:1:beamform_inst.num_input_channelsdistance = cos(beamform_inst.interf_angles_radians(k)) * beamform_inst.array_geometry(s,1) + ...sin(beamform_inst.interf_angles_radians(k)) * beamform_inst.array_geometry(s,2);phase_shift = 2.0 * pi * distance * freq_in_hertz / beamform_inst.param.kSpeedOfSoundMeterSeconds;interf_cov_vector(s) = complex(cos(phase_shift), sin(phase_shift));endinterf_cov_vector_transposed = interf_cov_vector.';beamform_inst.interf_cov_mats(t, k,:,:) = interf_cov_vector_transposed * conj(interf_cov_vector);xx = trace(squeeze(beamform_inst.interf_cov_mats(t, k,:,:)));beamform_inst.interf_cov_mats(t, k,:,:) = beamform_inst.interf_cov_mats(t, k,:,:) / xx;beamform_inst.interf_cov_mats(t, k,:,:) = beamform_inst.interf_cov_mats(t, k,:,:) * beamform_inst.param.kBalance;beamform_inst.interf_cov_mats(t, k,:,:) = squeeze(beamform_inst.interf_cov_mats(t, k,:,:)) + squeeze(beamform_inst.uniform_cov_mat(t,:,:));endend%NormalizeCovMatsfor t = 1:1:beamform_inst.param.kNumFreqBinsxx = conj(beamform_inst.delay_sum_masks(t,:)) * ...squeeze(beamform_inst.target_cov_mats(t,:,:)) * beamform_inst.delay_sum_masks(t,:).';xx = real(xx);xx = max(xx, 0);beamform_inst.rxiws(t) = xx;for k = 1:1:beamform_inst.param.kInterfNumxx = conj(beamform_inst.delay_sum_masks(t,:)) * ...squeeze(beamform_inst.interf_cov_mats(t,k,:,:)) * beamform_inst.delay_sum_masks(t,:).';xx = real(xx);xx = max(xx, 0);beamform_inst.rpsiws(t,k) = xx;endend
end2.3 初始化句柄
% *@author : aflyingwolf
% *@date : 2025.4.15
% *@file : beamform_instance.m
function beamform_inst = beamform_instance(beamform_param, sample_rate_hz, array_geometry, mic_num, target_direction)beamform_inst.param = beamform_param;beamform_inst.sample_rate_hz = sample_rate_hz;beamform_inst.num_input_channels = mic_num;beamform_inst.array_geometry = array_geometry - mean(array_geometry, 1);micArray = mic_array();[beamform_inst.array_sign, beamform_inst.array_normal] = micArray.direction(beamform_inst.array_geometry);beamform_inst.target_angle_radians = target_direction(1);beamform_inst.away_radians = pi/4.0;beamform_inst.away_radians2 = pi/2.0;beamform_inst.high_pass_postfilter_mask = 1.0;beamform_inst.time_smooth_mask = ones(1,beamform_param.kNumFreqBins);beamform_inst.final_mask = ones(1,beamform_param.kNumFreqBins);beamform_inst.wave_numbers = ones(1,beamform_param.kNumFreqBins);beamform_inst.mask_thresholds = ones(1,beamform_param.kNumFreqBins);beamform_inst.interf_angles_radians = ones(1, beamform_param.kInterfNum);for t = 1:1:beamform_param.kNumFreqBinsfreq_hz = (t-1) / beamform_param.kFftSize * beamform_inst.sample_rate_hz;beamform_inst.wave_numbers(t) = 2 * pi * freq_hz / beamform_param.kSpeedOfSoundMeterSeconds;beamform_inst.mask_thresholds(t) = beamform_inst.num_input_channels * beamform_inst.num_input_channels * ...beamform_param.kBeamwidthConstant * beamform_inst.wave_numbers(t) *...beamform_inst.wave_numbers(t);endbeamform_inst.delay_sum_masks = complex(zeros(beamform_param.kNumFreqBins, beamform_inst.num_input_channels));beamform_inst.target_cov_mats = complex(zeros(beamform_param.kNumFreqBins, ...beamform_inst.num_input_channels, beamform_inst.num_input_channels));beamform_inst.uniform_cov_mat = complex(zeros(beamform_param.kNumFreqBins, ...beamform_inst.num_input_channels, beamform_inst.num_input_channels));beamform_inst.interf_cov_mats = complex(zeros(beamform_param.kNumFreqBins, ...beamform_param.kInterfNum, ...beamform_inst.num_input_channels, beamform_inst.num_input_channels));beamform_inst.eig_m = complex(zeros(1, beamform_inst.num_input_channels));beamform_inst.low_mean_start_bin = floor(beamform_param.kLowMeanStartHz * beamform_param.kFftSize / ...beamform_inst.sample_rate_hz + 0.5);beamform_inst.low_mean_end_bin = floor(beamform_param.kLowMeanEndHz * beamform_param.kFftSize / ...beamform_inst.sample_rate_hz + 0.5);array_distance = micArray.distance(beamform_inst.array_geometry);for t = 1:1:beamform_param.kNumFreqBins
% diffuse_cov = zeros(beamform_inst.num_input_channels, beamform_inst.num_input_channels);if beamform_inst.wave_numbers(t) > 0diffuse_cov = besselj(0, beamform_inst.wave_numbers(t)*array_distance);elsediffuse_cov = eye(beamform_inst.num_input_channels);enddiffuse_cov = diffuse_cov/6.0;beamform_inst.uniform_cov_mat(t,:,:) = complex(diffuse_cov) * (1 - beamform_param.kBalance);endtarget_direction(2) = 0.0;target_direction(3) = 1.0;beamform_inst = beamform_reset(beamform_inst, target_direction);
end2.4 逻辑处理
% *@author : aflyingwolf
% *@date : 2025.4.15
% *@file : beamform_audio_process.mfunction output = beamform_audio_process(wav_data, array_geometry, sample_rate_hz, target_direction)beamform_param = beamform_define_const_param();%start bfbeamform_inst = beamform_instance(beamform_param, sample_rate_hz, array_geometry, size(array_geometry, 1), target_direction);%end bf
% %start xh
% beamform_inst = cell(1, 360);
% for k=1:20:360
% target_direction = k * pi / 180;
% kk = beamform_instance(beamform_param, sample_rate_hz, array_geometry, size(array_geometry, 1), target_direction);
% beamform_inst{k} = kk;
% end
% P = zeros(1,length(1:20:360));
%
% %end xhnum_channel = size(wav_data, 2);num_points = size(wav_data, 1);num_frames = fix((num_points-beamform_param.kFftSize)/(beamform_param.kFftSize/2)) + 1;num_points = num_frames * beamform_param.kFftSize/2 + beamform_param.kFftSize/2;window = reshape(kbdwin(beamform_param.kFftSize, 1.5),1,[]);spec = zeros(num_frames, beamform_param.kFftSize, num_channel);output = zeros(1, num_points);for ch = 1:num_channelframes = enframe(wav_data(:,ch), window, (beamform_param.kFftSize/2));frames = fft(frames, beamform_param.kFftSize, 2);spec(:,:,ch) = frames;end
% %start doa
% c = 340;
% Nele = size(wav_data, 2);
% omega = zeros(beamform_param.kNumFreqBins,1);
% H = zeros(360,beamform_param.kNumFreqBins,Nele);
% alpha = 0.0;
% r = 0.0463;
%
% theta = 90*pi/180; %固定一个俯仰角
% gamma = [0 300 240 180 120 60]*pi/180;
% step = 5;
%
% starts = 1;
% ends = beamform_param.kFftSize/2+1;
% for f = 1:step:360
% tao = r*sin(theta)*cos((f)/180*pi-gamma)/c; %方位角 0 < angle <360
% for k = starts:1:ends
% omega(k) = 2*pi*(k-1)*sample_rate_hz/beamform_inst.param.kFftSize;
% % steering vector
% H(f,k,:) = exp(-1j*omega(k)*tao);
% end
% end
%
% P = zeros(1,length(1:step:360));
% %end doah = waitbar(0,'1','name','Simulation');for f = 1:1:num_framess=sprintf('Simulation in process:%d',ceil(f/num_frames*100));waitbar(f/num_frames,h,[s '%']);in_frame_fft = squeeze(spec(f,:,:)).';in_frame_fft = in_frame_fft.';in_frame_fft = in_frame_fft(1:beamform_param.kNumFreqBins,:);% %start doa
% t = 0;
% for f_doa = 1:step:360
% filter = squeeze(H(f_doa,:,:));
% x_fft=bsxfun(@times, in_frame_fft,filter);
% % phase transformed
% x_fft = bsxfun(@rdivide, x_fft,abs(in_frame_fft));
% yf = sum(x_fft,2);
% t = t+1;
% %beamformed output energy
% P(t) = alpha * P(t) + (1-alpha) * yf'*yf;
% end
% index = 0;
% value1 = -1;
% P = real(P);
% for k = 1:step:length(1:step:360)
% if (P(k) - value1) > 1e-6
% value1 = P(k);
% index = k;
% end
% end
% ang = (index)*step;
% ang1 = ang;
%
% target_direction = ang1 * pi / 180;
% beamform_inst = beamform_reset(beamform_inst, target_direction);
%
% %end doa
% %start xh
% t=1;
% index = 0;
% value1 = -1;
% for k=1:20:360
% kk = beamform_inst{k};
% [out_frame_fft2, kk] = beamform_process_block(kk, in_frame_fft);
% beamform_inst{k} = kk;
%
% PP = out_frame_fft2 * out_frame_fft2';
% t = t + 1;
% if (PP - value1) > eps
% value1 = PP;
% out_frame_fft = out_frame_fft2;
% end
% end
%
% %end xh%start bf[out_frame_fft, beamform_inst] = beamform_process_block(beamform_inst, in_frame_fft);%endbf
% out_frame_fft = in_frame_fft(:,3).';out_frame_fft = [out_frame_fft, conj(fliplr(out_frame_fft(2:(beamform_param.kNumFreqBins-1))))];out_frame_pcm = ifft(out_frame_fft);out_frame_pcm = out_frame_pcm .* window;f_p = (f-1)*(beamform_param.kFftSize/2)+1;output(f_p:f_p+beamform_param.kFftSize-1) = output(f_p:f_p+beamform_param.kFftSize-1) + out_frame_pcm;endoutput = real(output);delete(h);
end2.5 核心代码
% *@author : aflyingwolf
% *@date : 2025.4.15
% *@file : beamform_process_block.m
function [output,beamform_inst] = beamform_process_block(beamform_inst, input)for k = beamform_inst.low_mean_start_bin+1:1:beamform_inst.high_mean_end_binbeamform_inst.eig_m = input(k,:);eig_m_norm_factor = sqrt(beamform_inst.eig_m * beamform_inst.eig_m');if abs(eig_m_norm_factor) > epsbeamform_inst.eig_m = beamform_inst.eig_m / eig_m_norm_factor;endrxim = conj(beamform_inst.eig_m) * squeeze(beamform_inst.target_cov_mats(k,:,:)) * beamform_inst.eig_m.';rxim = real(rxim);rxim = max(rxim, 0);ratio_rxiw_rxim = 0;if rxim > 0.0ratio_rxiw_rxim = beamform_inst.rxiws(k) / rxim;endrmw = abs(conj(beamform_inst.delay_sum_masks(k,:)) * beamform_inst.eig_m.');rmw = rmw * rmw;rmw_r = real(rmw);beamform_inst.new_mask(k) = 1.0;for t = 1:1:beamform_inst.param.kInterfNumkMaskMinimum = 0.01;rpsim = conj(beamform_inst.eig_m) * squeeze(beamform_inst.interf_cov_mats(k,t,:,:)) * beamform_inst.eig_m.';rpsim = real(rpsim);rpsim = max(rpsim, 0);ratio = 0.0;if rpsim > 0ratio = beamform_inst.rpsiws(k,t) / rpsim;endnumrator = rmw_r - ratio;denominator = ratio_rxiw_rxim - ratio;mask = 1.0;if denominator > beamform_inst.mask_thresholds(k)lambda = numrator / denominator;mask = lambda * ratio_rxiw_rxim / rmw_r;if mask < kMaskMinimummask = kMaskMinimum;endendbeamform_inst.new_mask(k) = beamform_inst.new_mask(k) * mask;endendfor k = beamform_inst.low_mean_start_bin+1:1:beamform_inst.high_mean_end_binbeamform_inst.time_smooth_mask(k) = beamform_inst.param.kMaskTimeSmoothAlpha * beamform_inst.new_mask(k) + ...(1 - beamform_inst.param.kMaskTimeSmoothAlpha) * beamform_inst.time_smooth_mask(k);end%ApplyLowFrequencyCorrectionlow_frequency_mask = mean(beamform_inst.time_smooth_mask(beamform_inst.low_mean_start_bin+1:...beamform_inst.low_mean_end_bin));beamform_inst.time_smooth_mask(1:beamform_inst.low_mean_start_bin) = low_frequency_mask;%ApplyHighFrequencyCorrectionhigh_pass_postfilter_mask = mean(beamform_inst.time_smooth_mask(beamform_inst.high_mean_start_bin:...beamform_inst.high_mean_end_bin));beamform_inst.time_smooth_mask(beamform_inst.high_mean_end_bin+1:beamform_inst.param.kNumFreqBins) = high_pass_postfilter_mask;%ApplyMaskFrequencySmoothingbeamform_inst.final_mask = beamform_inst.time_smooth_mask;for t = beamform_inst.low_mean_start_bin+1:1:beamform_inst.high_mean_end_binbeamform_inst.final_mask(t) = beamform_inst.param.kMaskFrequencySmoothAlpha * beamform_inst.final_mask(t) + ...(1 - beamform_inst.param.kMaskFrequencySmoothAlpha) * beamform_inst.final_mask(t-1);endfor t = beamform_inst.high_mean_end_bin + 1:-1:2beamform_inst.final_mask_(t-1) = beamform_inst.param.kMaskFrequencySmoothAlpha * beamform_inst.final_mask(t-1) + ...(1 - beamform_inst.param.kMaskFrequencySmoothAlpha) * beamform_inst.final_mask(t);end%ApplyMasksfor t = 1:1:beamform_inst.param.kNumFreqBinsoutput(t) = input(t,:) * beamform_inst.delay_sum_masks(t,:)';
% output(t) = input(t,1);output(t) = output(t) * beamform_inst.final_mask(t) * beamform_inst.param.kCompensationGain;endfor t = 1:1:4output(t) = complex(0);endend2.6 导向矢量计算
% *@author : aflyingwolf
% *@date : 2025.4.15
% *@file : mic_array.m
function A = mic_array()A.direction=@mic_direction;A.distance=@mic_distance;A.steer=@mic_steer_vec;
end% 两线垂直 == 点积和=0
% 两线平行 == 叉积长度为0 function [sign , array_normal_direction] = mic_direction(array)num_mic = size(array,1);assert(num_mic>=2);sign = -1; % 线性1, 平面2is_linear_array = true;first_pair_direction = array(2,:) - array(1,:);for i=3:num_micdirection = array(i,:) - array(i-1,:);if abs(norm(cross(first_pair_direction, direction))) > epsis_linear_array = false;break;endendif is_linear_arraysign = 1; array_normal_direction = [first_pair_direction(2), -first_pair_direction(1), 0];return ;endassert(num_mic>=3);second_pair_direction = array(3,:) - array(2,:);normal_direction = cross(first_pair_direction, second_pair_direction);is_plane_array = true;for i=4:num_micpair_direction = array(i,:) - array(i-1,:);if dot(normal_direction,pair_direction) > epsis_plane_array = false;break;endendif is_plane_arraysign = 2;array_normal_direction = normal_direction;return ;endendfunction array_distance = mic_distance(array)num_mic = size(array, 1);array_distance = zeros(num_mic, num_mic);for t=1:num_micfor s=t+1:num_micd = norm(array(t,:)-array(s,:));array_distance(t,s) = d;array_distance(s,t) = d;endend
endfunction steer = mic_steer_vec(array, angle, f, c)angle_radians = angle/180*pi;num_mic = size(array,1);dis = zeros(1, num_mic);fz = reshape(f,[],1);for i = 1:num_micdis(i) = cos(angle_radians)*array(i,1) + sin(angle_radians)*array(i,2);endphase = 2*pi*fz*dis/c;steer = complex(cos(phase), sin(phase));
end
2.7 测试demo
% *@author : aflyingwolf
% *@date : 2025.4.15
% *@file : test_beamform.minput_wav_file = 'simulate_role1_0_t60_0.2_role2_180_t60_0.2.wav';
%0.0463 0.0 0.0 0.02315 -0.0401 0.0 -0.02315 -0.0401 0.0 -0.0463 0.0 0.0 -0.02315 0.0401 0.0 0.02315 0.0401 0.0
array_geometry = [0.0463, 0.0, 0.0; 0.02315, -0.0401, 0.0; -0.02315, -0.0401, 0.0; -0.0463, 0.0, 0.0;-0.02315, 0.0401, 0.0; 0.02315, 0.0401, 0.0];target_direction = 0 * pi / 180;[wav_data, sample_rate_hz] = audioread(input_wav_file);output = beamform_audio_process(wav_data, array_geometry, sample_rate_hz, [target_direction, 0, 1]);
% output = beamform_audio_process_fromfile(wav_data, array_geometry, sample_rate_hz, [target_direction, 0, 1]);
% output = wav_data;
output_filename = input_wav_file(1:(length(input_wav_file)-4));
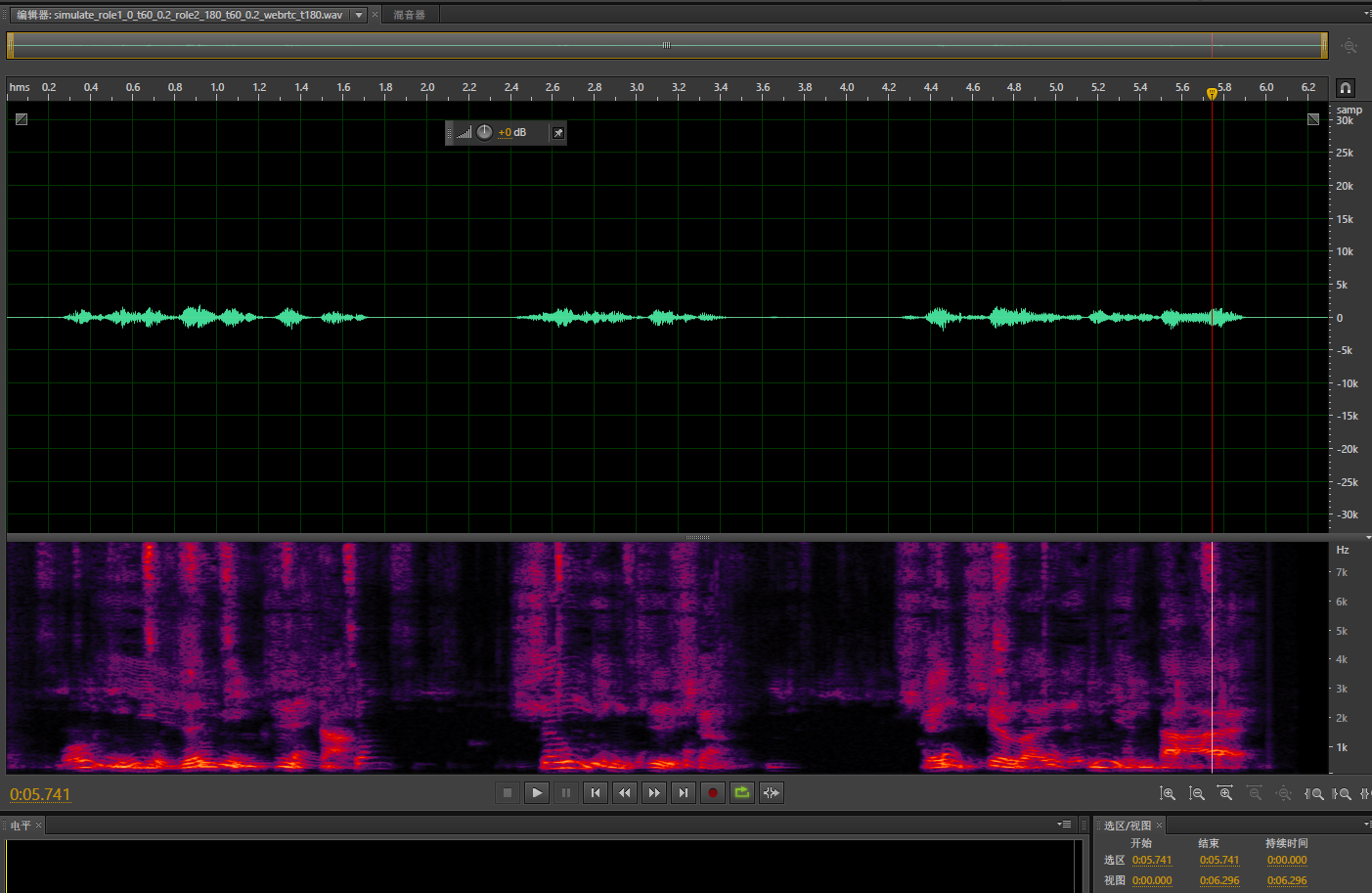
output_filename = output_filename + "_webrtc_t0.wav";audiowrite(output_filename, output, sample_rate_hz);三、结果展示
3.1 0度方向的波束

3.2 180度方向的波束
四、总结
本节我们实现了基于webrtc的非线性波束形成算法仿真,从结果上看,降噪效果较好,可以很好的去除干扰,但是引入了非线性,对后面去除平稳噪声不利。
相关文章:
波束形成(BF)从算法仿真到工程源码实现-第十节-非线性波束形成
一、概述 本节我们基于webrtc的非线性波束形成进行代码仿真,并对仿真结果进行展示和分析总结。更多资料和代码可以进入https://t.zsxq.com/qgmoN ,同时欢迎大家提出宝贵的建议,以共同探讨学习。 二、仿真代码 2.1 常量参数 % *author : a…...

《忘尘谷》音阶与调性解析
一、音高与音名的对应关系 根据搜索结果及音乐理论,结合《忘尘谷》的曲谱信息,其音阶与调性分析如下: 调性判定 原曲调性为 D调(原曲标注为D调),但曲谱编配时采用 C调指法,通过变调夹夹2品&…...

App测试小工具
前言 最近app测试比较多,每次都得手动输入日志tag,手动安装,测完又去卸载,太麻烦。就搞了小工具使用。 效果预览 每次测试完成,点击退出本次测试,就直接卸载了,usb插下一个手机又可以继续测了…...

小事务架构下的业务完整性保障:基于业务处理记录与补偿机制的技术实现
随着微服务架构、事件驱动架构(EDA)和最终一致性理念的普及,传统的大事务管理方式被更细粒度的“小事务”所取代。在这种架构中,全局业务流程被拆解成多个局部事务节点,通过异步消息进行编排。这种解耦提高了可扩展性和…...

数智读书笔记系列029 《代数大脑:揭秘智能背后的逻辑》
《代数大脑:揭秘智能背后的逻辑》书籍简介 作者简介 加里F. 马库斯(Gary F. Marcus)是纽约大学心理学荣休教授、人工智能企业家,曾创立Geometric Intelligence(后被Uber收购)和Robust.AI公司。他在神经科学、语言学和人工智能领域发表了大量论文,并著有《重启AI》等多部…...
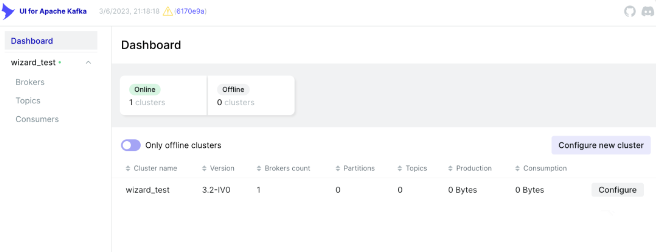
Apache Kafka UI :一款功能丰富且美观的 Kafka 开源管理平台!!
Apache Kafka UI 是一个免费的开源 Web UI,用于监控和管理 Apache Kafka 集群,可方便地查看 Kafka Brokers、Topics、消息、Consumer 等情况,支持多集群管理、性能监控、访问控制等功能。 1 特征 多集群管理: 在一个地方监控和管理…...
临床协调简历模板
模板信息 简历范文名称:临床协调简历模板,所属行业:其他 | 职位,模板编号:C1S3WO 专业的个人简历模板,逻辑清晰,排版简洁美观,让你的个人简历显得更专业,找到好工作。希…...

【第45节】windows程序的其他反调试手段上篇
目录 引言 一、通过窗口类名和窗口名判断 二、检测调试器进程 三、父进程是否是Explorer 四、RDTSC/GetTickCount时间敏感程序段 五、StartupInfo结构的使用 六、使用BeingDebugged字段 七、 PEB.NtGlobalFlag,Heap.HeapFlags,Heap.ForceFlags 八、DebugPort:CheckRem…...
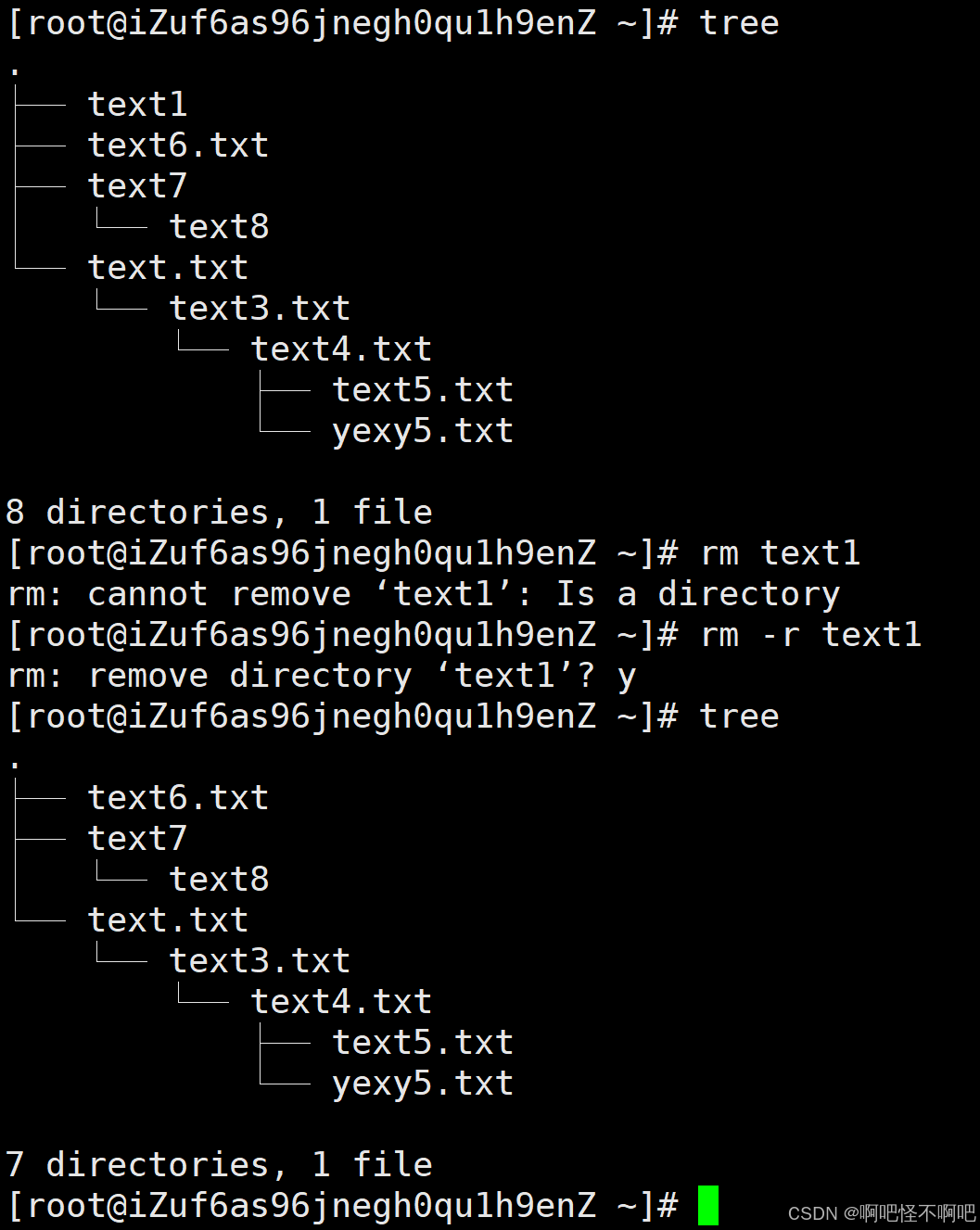
Linux常见指令介绍上(入门级)
1. ls指令 功能:显示出当前目录下的所有子目录与文件。 PS:注意显示的是当前文件下的子目录与文件。 以下这些是可以和ls配套使用的一些选项 -a 列出目录下的所有文件,包括以 . 开头的隐含文件。 -d 将目录象文件一样显示,而不是显示其下…...
【版本控制】git命令使用大全
大家好,我是jstart千语。今天来总结一下git的使用命令,上文会先将git命令都列出来,便于快速寻找,然后还会对部分常用命令图文讲解,适合新手,让你快速地理解。最后还会总结在idea中使用git。如果有缺失的&am…...

新兴技术安全:物联网、区块链与人工智能的安全挑战与应对
目录 新兴技术安全:物联网、区块链与人工智能的安全挑战与应对 一、物联网安全:连接世界背后的安全隐忧 物联网架构安全 设备认证 数据安全 二、区块链安全:信任基石的安全考验 共识机制安全 智能合约安全 私钥管理 三、人工智能安…...

手阳明大肠经之合谷穴
个人主页:云纳星辰怀自在 座右铭:“所谓坚持,就是觉得还有希望!” 又名:1.《针灸甲乙经》:虎口。 所属经络:手阳明大肠经 定位 在手背,第1、2掌骨间,当第2掌骨桡侧的中点…...

【VUE3】练习项目——大事件后台管理
目录 0 前言 1 准备工作 1.1 安装pnpm 1.2 创建vue项目 1.3 Eslint & Prettier的配置 1.4 husky 提交代码检查 1.5 目录调整 1.6 VueRouter4 1.6.1 基础配置 1.6.2 路由跳转 1.7 引入 Element Plus 组件库 1.8 Pinia 1.8.1 优化 1.9 封装请求工具 1.9.1 安…...

kylin系统软件移植部署过程中遇到的问题及解决方案
有一个跨平台的c++软件,基于qt,boost,zmq,kafka等库,使用cmake脚本管理构建。在windows下和ubuntu下都能正常编译。在部署到kylin系统下时,遇到了一些问题。记录一下解决过程。 KYLIN 操作系统部署 c++开发环境: 安装了git,ninja,qt,boost等编译必要软件。因为之前…...
万字长篇————C语言指针学习汇总
经过一段时间的学习,我们已经接触到了C语言的很多知识了。不过目前我们接下来我们要接触C语言中一个最大的“门槛”:指针。 什么是指针? 在介绍指针之前,我们首先要明白变量与地址之间的关系。 举一个生活中的案例:一…...
实验一 HDFS的Shell操作
一、实验目的 熟悉HDFS Shell的语法格式,完成对HDFS上文件和目录的一系列操作 二、实验要求 2.1 练习dfs常用的子命令 ① -ls ② -du ③ -mv ④ -cp ⑤ -rm ⑥ -put ⑦ -cat ⑧ -help ⑨ -mkdir ⑩ -get 2.2通过Shell脚本定时采集数据到HDFS 三、实…...
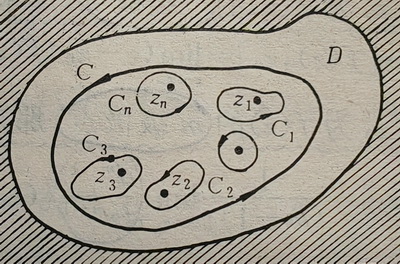
复变函数摘记3
复变函数摘记3 5. 留数5.1 可去奇点、极点、本性奇点5.2 零点与极点的关系5.3 在无穷远点处的情形5.4 留数 5. 留数 \quad 如果函数 f ( z ) f(z) f(z) 在 z 0 z_0 z0 及 z 0 z_0 z0 的邻域内处处可导,那么称 f ( z ) f(z) f(z) 在点 z 0 z_0 z0 处解析。…...

【行测】判断推理:类比推理 and 定义判断
> 作者:დ旧言~ > 座右铭:读不在三更五鼓,功只怕一曝十寒。 > 目标:掌握 类比推理 and 定义判断 基本题型,并能运用到例题中。 > 毒鸡汤:有些事情,总是不明白,所以我不会…...
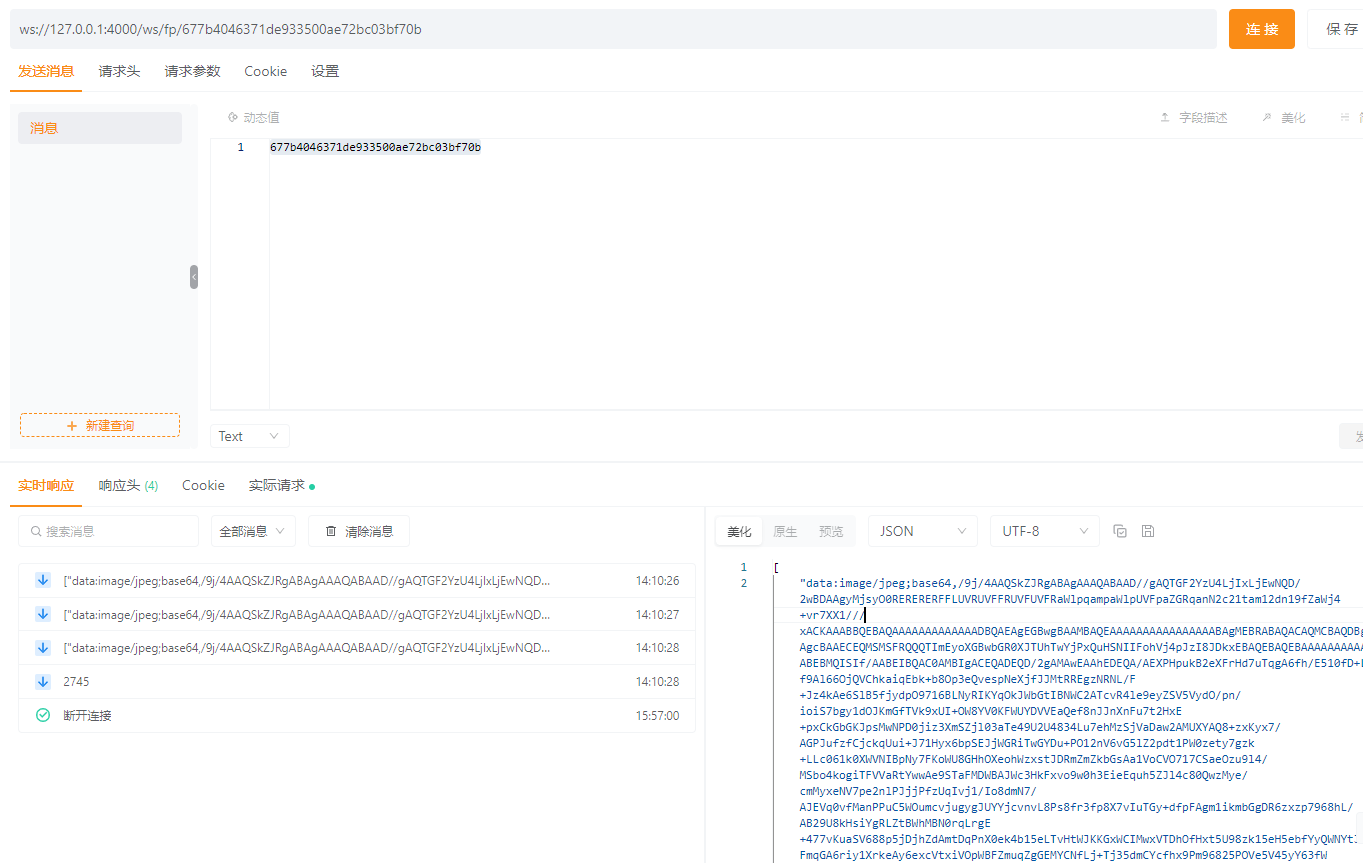
Java使用WebSocket视频拆帧进度处理与拆帧图片推送,结合Apipost进行调试
<dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-websocket</artifactId></dependency>Configuration public class WebSocketConfig {/*** 启动 WebSocket 服务器*/Beanpublic ServerEndpointE…...
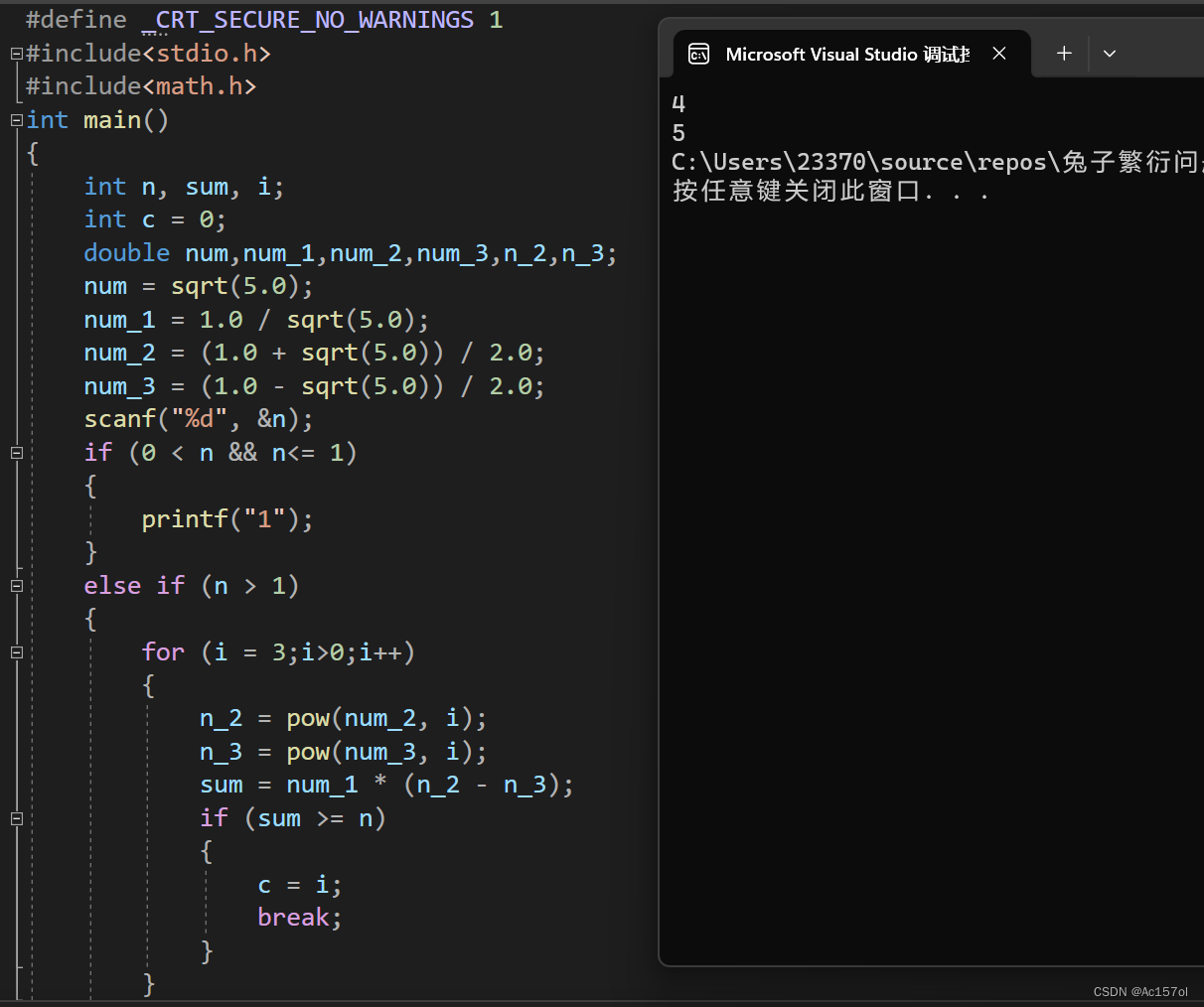
计算斐波那契数列
1.对于斐波那契数列的理解: (1)常规 该数列由兔子繁衍的想法产生,故又“兔子数列” 其数值为:1、1、2、3、5、8、13、21、34 从数学定义上走:F(0)1,F(1)1, F(n)F(n - 1)F(n - 2)(n ≥ 2,n ∈…...
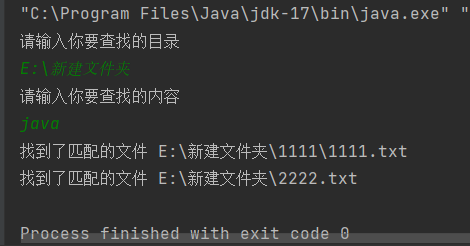
JAVA如何操作文件?(超级详细)
目录 一、认识文件和相关知识 1.认识文件 2.⽬录 3.⽂件路径(Path) 4.文本文件和二进制文件的区分 二、File类操作文件 1.构造方法 2.方法 2.1 方法表 2.2 get相关的方法和构造方法 2.2.1 “.” 和 “..” 2.3 is相关的方法 2.4 删除相关…...

(2)VTK C++开发示例 --- 绘制多面锥体
文章目录 1. 概述2. CMake链接VTK3. main.cpp文件4. 演示效果 更多精彩内容👉内容导航 👈👉VTK开发 👈 1. 概述 VTK C开发示例程序; 使用C 和VTK绘制一个多面锥体。 环境说明系统ubuntu22.04、windows11cmake3.22、3.2…...
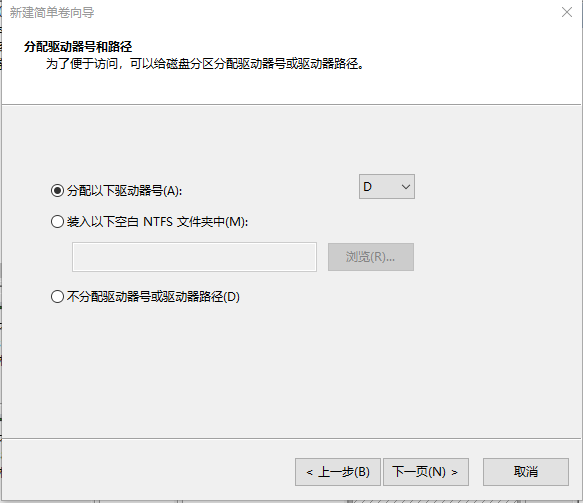
(2025-04-12)向老主机箱中安装新买的显卡及固态硬盘
目录 1 引言2 显卡及其驱动的安装3 固态硬盘的安装及C盘扩容3.1 固态硬盘正确连接到主板上后,操作系统上面仍然不显示对应盘符怎么办?3.2 如何对C盘扩容?3.3 新问题:原有D盘程序不能运行 4 总结 1 引言 今天安装昨天买的新固态硬…...
rk3588 驱动开发(一)字符设备开发
3.字符设备驱动开发 3.1 什么是字符设备驱动 字符设备:就是一个个字节,按照字节流进行读写操作的设备,读写是按照先后顺序的。 举例子:IIC 按键 LED SPI LCD 等 Linux 应用程序调用驱动程序流程: Linux中驱动加载成功…...
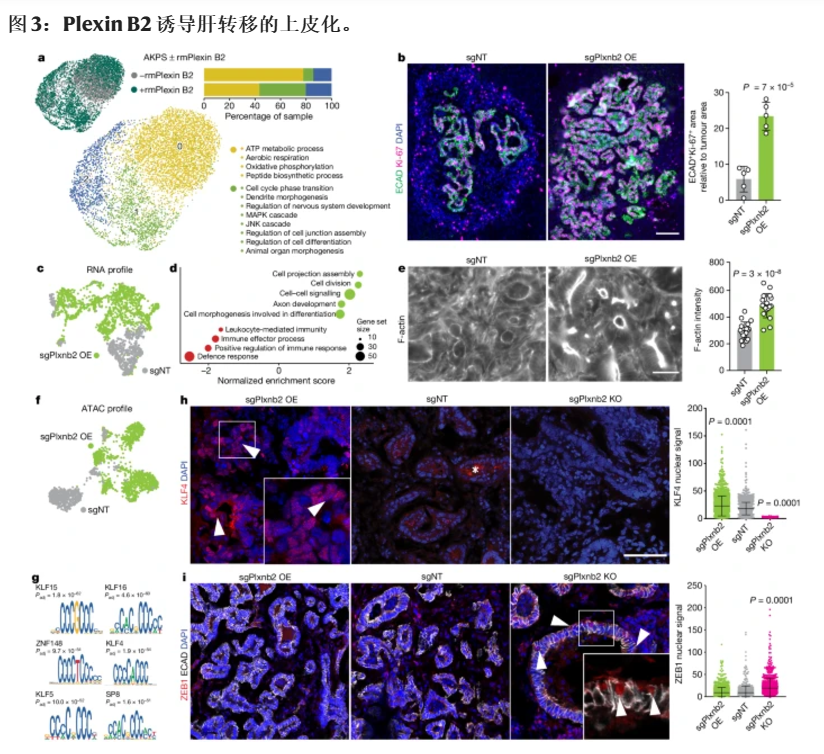
AbMole| 体内相互作用筛选揭示肝脏对癌症转移的限制
癌症转移,作为导致患者死亡的主要原因之一,其复杂机制一直是医学界研究的热点。肝脏,作为癌症转移的常见靶器官,其微环境对癌症细胞的生长和转移具有重要影响。然而,肝脏如何限制癌症转移的具体机制尚不完全清楚。 来…...
STM32移植文件系统FATFS——片外SPI FLASH
一、电路连接 主控芯片选型为:STM32F407ZGT6,SPI FLASH选型为:W25Q256JV。 采用了两片32MB的片外SPI FLASH,电路如图所示。 SPI FLASH与主控芯片的连接方式如表所示。 STM32F407GT6W25Q256JVPB3SPI1_SCKPB4SPI1_MISOPB5SPI1_MOSI…...
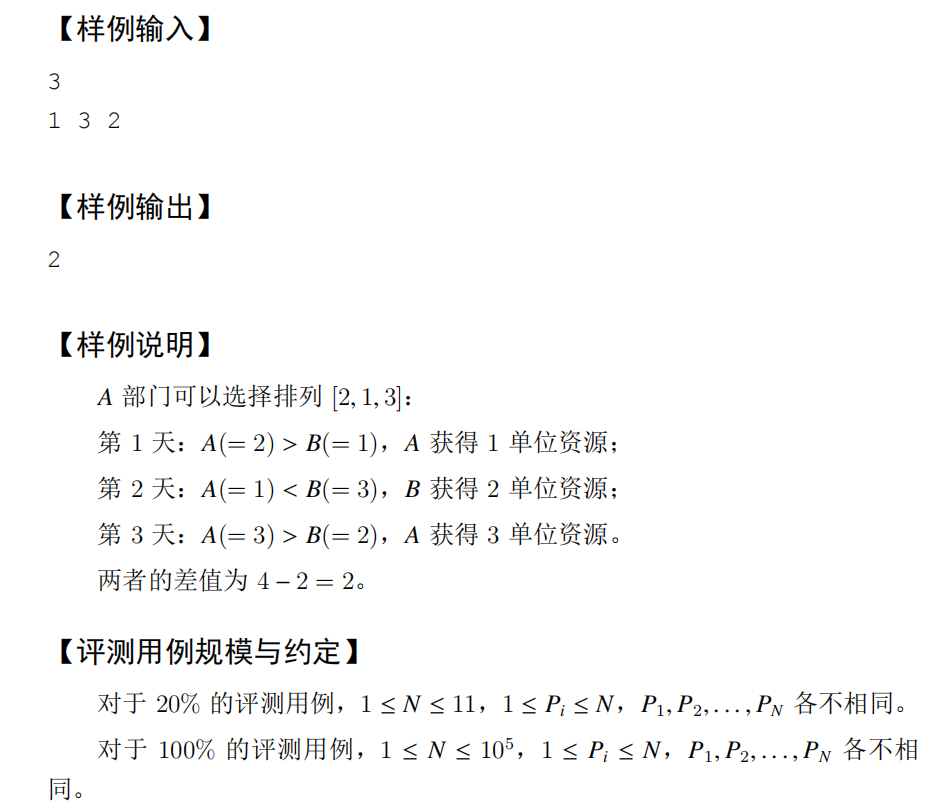
2025年第十六届蓝桥杯省赛JavaB组真题回顾
第16届蓝桥杯省赛已经结束了,第一次参加也是坐牢了4个小时,现在还是来总结一下吧(先声明以下的解法,大家可以当作一种思路来看,解法不一定是正解,只是给大家提供一种能够正常想到的思路吧) 试题…...

Android 接口定义语言 (AIDL)
目录 1. 本地进程调用(同一进程内)2. 远程进程调用(跨进程)3 `oneway` 关键字用于修改远程调用的行为Android 接口定义语言 (AIDL) 与其他 IDL 类似: 你可以利用它定义客户端与服务均认可的编程接口,以便二者使用进程间通信 (IPC) 进行相互通信。 在 Android 上,一个进…...
c# 数据结构 链表篇 有关双向链表的一切
本人能力有限,如有不足还请斧正 目录 0.双向链表的好处 1.双向链表的分类 2.不带头节点的标准双向链表 节点类:有头有尾 链表类:也可以有头有尾 也可以只有头 增 头插 尾插 删 查 改 遍历 全部代码 3.循环双向链表 节点类 链表类 增 头插 尾插 删 查 遍历…...

Debian服务器挂载外部存储设备的完整指南
在 Debian 系统中挂载外部存储设备(如 U 盘、移动硬盘、SSD)是服务器运维和桌面使用中非常常见的操作。本文将为你详细拆解从识别设备、格式化到手动/自动挂载的全过程,适合新手到进阶用户参考。 一、准备阶段:插入存储设备并识别 1. 插入外部设备后查看…...