双目视觉中矩阵等参数说明及矫正
以下是标定文件中各个参数的详细解释:
1. 图像尺寸 (imageSize)
- 参数值:
[1280, 1024] - 含义: 相机的图像分辨率,宽度为1280像素,高度为1024像素。
2. 相机内参矩阵 (leftCameraMatrix / rightCameraMatrix)
- 结构:
yaml
data: [fx, 0, cx, 0, fy, cy, 0, 0, 1] - 参数含义:
fx,fy: 相机的焦距(像素单位),表示图像传感器在x和y方向的缩放。cx,cy: 主点坐标(像素单位),即光轴与图像平面的交点。
- 示例:
- 左相机:
fx=4599.03,fy=4599.03,cx=650.9088,cy=457.0334 - 右相机:
fx=4589.28,fy=4589.28,cx=632.6679,cy=484.3212
- 左相机:
3. 畸变系数 (leftDistCoeffs / rightDistCoeffs)
- 结构:
[k1, k2, p1, p2, k3] - 参数含义:
k1,k2,k3: 径向畸变系数,用于修正图像边缘的膨胀或收缩。p1,p2: 切向畸变系数,修正由镜头与传感器不平行引起的畸变。
- 示例:
- 左相机:
k1=0.00656,k2=-0.1852,p1=-0.0001287,p2=0.001295,k3=0 - 右相机:
k1=-0.00789,k2=0.2932,p1=-0.0019676,p2=0.0001764,k3=0
- 左相机:
4. 立体外参:旋转矩阵 (R) 和平移向量 (T)
- R: 右相机相对于左相机的3x3旋转矩阵,描述方向关系。
- 示例: 通过旋转矩阵可将右相机坐标系转换到左相机坐标系。
- T: 右相机相对于左相机的3x1平移向量,单位为标定板尺寸单位(如毫米)。
- 示例:
[-34.9837, -0.0907, 3.3531]表示右相机在左相机的左侧34.98单位、下方0.09单位、后方3.35单位。
- 示例:
5. 立体校正参数 (R1, R2, P1, P2)
- R1/R2: 左右相机的3x3校正旋转矩阵,使图像平面共面且行对齐。
- P1/P2: 校正后的3x4投影矩阵,用于将三维点投影到校正后的图像平面。
- P1(左相机): 通常与原始内参接近,第四列为0。
- P2(右相机): 第四列包含基线信息,例如
-167552.8 = -fx * B(基线B≈35.16单位)。
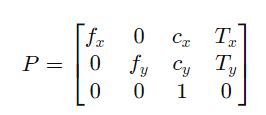
6. 视差转深度矩阵 (Q)
- 结构:
yaml
data: [1, 0, 0, -cx, 0, 1, 0, -cy, 0, 0, 0, f, 0, 0, -1/Tx, (cx - cx')/Tx] - 关键参数:
f: 校正后的焦距(4767.59)。Tx: 基线长度在x方向的分量(34.98单位)。- 最后一行的
-1/Tx和(cx - cx')/Tx用于计算深度:
深度 Z = f * B / (视差 d)。
7. 有效区域 (validRoiL / validRoiR)
- 参数值:
[0, 0, 1280, 1024] - 含义: 校正后图像的有效区域(无黑边),此处整个图像均有效。
总结应用
- 立体匹配: 使用校正后的图像(通过
initUndistortRectifyMap生成映射)进行行对齐。 - 深度计算: 利用视差图和Q矩阵(通过
reprojectImageTo3D)生成三维点云。 - 基线计算: 平移向量T的模长为实际基线长度,约为35单位(需确认标定板尺寸单位)。
通过以上参数,可完成相机的畸变校正、立体校正及深度恢复。
以下是立体校正参数 R1, R2, P1, P2 的详细解释,包括每个矩阵的结构和具体数值的含义:
1. 校正旋转矩阵 R1 和 R2
作用
- R1 (左相机): 将左相机的原始图像平面旋转到校正后的共面坐标系。
- R2 (右相机): 将右相机的原始图像平面旋转到校正后的共面坐标系。
- 目的是使两相机的图像平面平行且行对齐(极线水平对齐),简化立体匹配。
矩阵结构(3x3 旋转矩阵)
旋转矩阵的每个元素表示坐标系之间的旋转变换关系,例如:
-
R1 的数值:
data: [0.99997555568908714, -0.0062994551725360625, -0.003033955970468287,0.0062989404771726203, 0.99998014542628355, -0.00017917057171665187,0.0030350244095505921, 0.0001600554839471561, 0.99999538149387235]- 物理意义:
- 第一行
[0.999975, -0.006299, -0.003034]: 表示校正后坐标系相对于原始坐标系的X轴方向。 - 第二行
[0.006299, 0.999980, -0.000179]: 表示Y轴方向。 - 第三行
[0.003035, 0.000160, 0.999995]: 表示Z轴方向。
- 第一行
- 特点: 接近单位矩阵,说明左相机的校正旋转较小。
- 物理意义:
-
R2 的数值:
data: [0.99543482924512139, 0.0025814032057267745, -0.095408789339480812,-0.0025652019951301346, 0.99999666709757318, 0.00029245934628591462,0.095409226306789358, -4.638140266466435e-05, 0.99543813337861697]- 物理意义:
- 第三行
[0.095409, -0.000046, 0.995438]: 右相机的Z轴旋转角度较大(绕X/Y轴的旋转)。
- 第三行
- 特点: 较大的非对角元素表明右相机需要更明显的旋转来对齐极线。
- 物理意义:
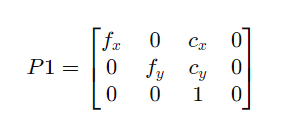
2. 投影矩阵 P1 和 P2
作用
- P1 (左相机): 将校正后的左相机三维点投影到二维图像平面。
- P2 (右相机): 将校正后的右相机三维点投影到二维图像平面,并包含基线信息。
- 用于生成校正后的图像和深度计算。
矩阵结构(3x4 投影矩阵)
投影矩阵的通用形式:
其中, Tx,Ty 可能与基线相关(仅对右相机有意义)。
P1 的数值(左相机):
yaml
data: [4767.5938097846156, 0., 665.86970520019531, 0., | |
0., 4767.5938097846156, 470.13141250610352, 0., | |
0., 0., 1., 0.] |
-
分解结构:
- 参数含义:
- fx=4767.59 f_x = 4767.59 fx=4767.59: 校正后的左相机x轴焦距(可能与原始焦距不同)。
- cx=665.87 c_x = 665.87 cx=665.87, cy=470.13 c_y = 470.13 cy=470.13: 校正后的主点坐标。
- 第四列全为0,因为左相机是参考坐标系。
- 参数含义:
P2 的数值(右相机):
data: [4767.5938097846156, 0., 1081.5456809997559, -167552.80474900999, | |
0., 4767.5938097846156, 470.13141250610352, 0., | |
0., 0., 1., 0.] |
-
分解结构:

- 参数含义:
- cx′=1081.55 c_x' = 1081.55 cx′=1081.55: 右相机校正后的主点x坐标。
- 第四列: −fx⋅B=−167552.8 -f_x \cdot B = -167552.8 −fx⋅B=−167552.8,其中:
-
B B B 是基线长度(单位与标定板一致),计算得:
B=167552.84767.59≈35.16(与平移向量T的x分量34.98接近) B = \frac{167552.8}{4767.59} \approx 35.16 \text{(与平移向量T的x分量34.98接近)} B=4767.59167552.8≈35.16(与平移向量T的x分量34.98接近)
-
负号表示右相机在左相机的左侧。
-
- 参数含义:
3. 关键差异与用途
-
焦距与主点:
- 校正后的焦距(P1/P2中的fx,fy f_x, f_y fx,fy)可能与原始内参不同,因校正可能缩放图像。
- 主点 cx,cy c_x, c_y cx,cy 变化是因图像平面旋转后光轴位置改变。
-
基线信息:
-
P2的第四列直接编码基线长度 B B B,用于计算深度:
深度Z=fx⋅B视差d \text{深度} Z = \frac{f_x \cdot B}{\text{视差} d} 深度Z=视差dfx⋅B
-
-
行对齐:
- 校正后的图像满足 cy左=cy右 c_y^{\text{左}} = c_y^{\text{右}} cy左=cy右(此处均为470.13),确保极线水平对齐。
4. 实际应用
-
生成校正映射:
python
# OpenCV 示例mapL_x, mapL_y = cv2.initUndistortRectifyMap(leftCameraMatrix, leftDistCoeffs, R1, P1, imageSize, cv2.CV_32FC1)- 使用R1和P1校正左图像,R2和P2校正右图像。
-
深度计算:
-
通过视差图(立体匹配)和Q矩阵(包含基线信息)恢复三维坐标:

-
调用
cv2.reprojectImageTo3D(disparity, Q)可直接生成三维点云。
-
总结
- R1/R2: 旋转矩阵,用于极线对齐,使图像行对齐。
- P1/P2: 投影矩阵,定义校正后的相机参数,P2包含基线信息。
- 数值差异: 焦距、主点、基线长度是立体视觉深度计算的核心参数。
以下是立体校正的具体实现步骤,结合标定参数和OpenCV等工具的实际操作流程:
1. 获取相机标定参数
从标定文件(如YAML)中读取以下关键参数:
- 内参矩阵:
leftCameraMatrix,rightCameraMatrix - 畸变系数:
leftDistCoeffs,rightDistCoeffs - 立体外参:旋转矩阵
R和平移向量T - 校正参数:
R1,R2,P1,P2 - 图像尺寸:
imageSize = (width, height)
2. 计算校正映射(Remap Maps)
使用 cv2.initUndistortRectifyMap 生成左右相机的畸变校正和极线对齐的映射表:
python
import cv2 | |
import numpy as np | |
# 读取标定参数(示例值) | |
leftCameraMatrix = np.array([[4599.03, 0, 650.909], [0, 4599.03, 457.033], [0, 0, 1]]) | |
leftDistCoeffs = np.array([0.00656, -0.1852, -0.0001287, 0.001295, 0]) | |
rightCameraMatrix = np.array([[4589.28, 0, 632.668], [0, 4589.28, 484.321], [0, 0, 1]]) | |
rightDistCoeffs = np.array([-0.00789, 0.2932, -0.0019676, 0.0001764, 0]) | |
R = np.array([[0.9957, -0.0088, 0.0924], [0.0089, 0.99996, -0.0002], [-0.0924, 0.00105, 0.9957]]) | |
T = np.array([-34.9837, -0.0907, 3.3531]) | |
R1 = np.array([[0.999976, -0.0063, -0.00303], [0.0063, 0.99998, -0.00018], [0.00303, 0.00016, 0.999995]]) | |
R2 = np.array([[0.9954, 0.00258, -0.0954], [-0.00257, 0.999997, 0.00029], [0.0954, -0.000046, 0.9954]]) | |
P1 = np.array([[4767.59, 0, 665.87, 0], [0, 4767.59, 470.13, 0], [0, 0, 1, 0]]) | |
P2 = np.array([[4767.59, 0, 1081.55, -167552.8], [0, 4767.59, 470.13, 0], [0, 0, 1, 0]]) | |
imageSize = (1280, 1024) | |
# 计算左相机的校正映射 | |
mapL1, mapL2 = cv2.initUndistortRectifyMap( | |
leftCameraMatrix, leftDistCoeffs, R1, P1, imageSize, cv2.CV_32FC1 | |
) | |
# 计算右相机的校正映射 | |
mapR1, mapR2 = cv2.initUndistortRectifyMap( | |
rightCameraMatrix, rightDistCoeffs, R2, P2, imageSize, cv2.CV_32FC1 | |
) |
3. 应用校正映射到原始图像
使用 cv2.remap 对左右相机的原始图像进行校正:
python
# 读取原始图像(示例) | |
left_img_raw = cv2.imread("left_image.png") | |
right_img_raw = cv2.imread("right_image.png") | |
# 校正左图像 | |
left_img_rect = cv2.remap( | |
left_img_raw, mapL1, mapL2, interpolation=cv2.INTER_LINEAR | |
) | |
# 校正右图像 | |
right_img_rect = cv2.remap( | |
right_img_raw, mapR1, mapR2, interpolation=cv2.INTER_LINEAR | |
) |
4. 验证校正效果
检查校正后的图像是否满足以下条件:
-
行对齐:左右图像中同一物体的像素行号一致(极线水平对齐)。
python
# 绘制水平线辅助观察for y in range(0, imageSize[1], 50):cv2.line(left_img_rect, (0, y), (imageSize[0], y), (0, 255, 0), 1)cv2.line(right_img_rect, (0, y), (imageSize[0], y), (0, 255, 0), 1)# 并列显示图像combined = np.hstack((left_img_rect, right_img_rect))cv2.imshow("Rectified Images", combined)cv2.waitKey(0)
-
去除畸变:检查图像边缘是否无拉伸或压缩(如棋盘格直线恢复)。
5. 立体匹配与深度计算
校正后的图像可直接用于生成视差图(需左右图像行对齐):
python
# 使用SGBM算法计算视差图 | |
stereo = cv2.StereoSGBM_create( | |
minDisparity=0, | |
numDisparities=64, # 视差范围 | |
blockSize=11, | |
P1=8*3*11**2, | |
P2=32*3*11**2, | |
disp12MaxDiff=1, | |
uniquenessRatio=10, | |
speckleWindowSize=100, | |
speckleRange=32 | |
) | |
disparity = stereo.compute( | |
cv2.cvtColor(left_img_rect, cv2.COLOR_BGR2GRAY), | |
cv2.cvtColor(right_img_rect, cv2.COLOR_BGR2GRAY) | |
) | |
# 转换为可显示的视差图(归一化) | |
disparity_vis = cv2.normalize(disparity, None, alpha=0, beta=255, norm_type=cv2.NORM_MINMAX, dtype=cv2.CV_8U) | |
cv2.imshow("Disparity", disparity_vis) | |
cv2.waitKey(0) |
6. 深度恢复(三维坐标计算)
利用Q矩阵将视差图转换为三维点云:
python
# Q矩阵(从标定文件读取) | |
Q = np.array([ | |
[1, 0, 0, -665.87], | |
[0, 1, 0, -470.13], | |
[0, 0, 0, 4767.59], | |
[0, 0, -0.028454, 11.8278] | |
]) | |
# 生成三维点云 | |
points_3d = cv2.reprojectImageTo3D(disparity, Q) | |
# 保存点云(示例) | |
import open3d as o3d | |
pcd = o3d.geometry.PointCloud() | |
pcd.points = o3d.utility.Vector3dVector(points_3d.reshape(-1, 3)) | |
o3d.io.write_point_cloud("output.ply", pcd) |
关键原理总结
-
极线约束:通过旋转(R1, R2)使左右图像平面平行,极线水平对齐。
-
投影矩阵:P1和P2定义了校正后的虚拟相机参数,包含基线信息(P2的第四列)。
-
深度公式:
Z=f⋅Bd(f为焦距,B为基线,d为视差) Z = \frac{f \cdot B}{d} \quad \text{(f为焦距,B为基线,d为视差)} Z=df⋅B(f为焦距,B为基线,d为视差)
Q矩阵封装了该公式的参数,可直接用于视差到深度的转换。
注意事项
- 标定精度:标定误差会导致校正后图像残留畸变或对齐偏差。
- 有效区域:校正后的图像可能有黑边(由
validRoiL和validRoiR定义),需裁剪使用。 - 基线单位:平移向量T和Q矩阵的单位需一致(通常为毫米或米)。
通过以上步骤,可将原始双目图像转换为行对齐的无畸变图像,为后续立体匹配和深度计算提供基础。
以下是优化立体校正代码性能的详细步骤和策略,从算法、硬件、代码结构三个层面进行优化:
一、算法级优化
1. 降低输入图像分辨率
- 方法:在保证视差精度的前提下,降低图像分辨率。
- 实现:
python
scale_factor = 0.5 # 缩小为原图的1/2small_size = (int(imageSize[0] * scale_factor), int(imageSize[1] * scale_factor))left_img_small = cv2.resize(left_img_raw, small_size, interpolation=cv2.INTER_AREA)right_img_small = cv2.resize(right_img_raw, small_size, interpolation=cv2.INTER_AREA) - 效果:计算量减少为原来的1/4(面积比例),显著提升后续步骤速度。
2. 使用快速插值方法
- 优化点:在
cv2.remap中使用INTER_NEAREST或INTER_LINEAR。 - 代码:
python
left_img_rect = cv2.remap(left_img_raw, mapL1, mapL2, interpolation=cv2.INTER_NEAREST) - 速度对比:
INTER_NEAREST比INTER_CUBIC快约5倍,但会降低图像质量。
3. 预计算并缓存映射表
- 场景:若相机参数固定,避免每次运行都重新计算映射表。
- 实现:
python
# 预计算并保存映射表到文件(只需运行一次)np.savez("remap_maps.npz", mapL1=mapL1, mapL2=mapL2, mapR1=mapR1, mapR2=mapR2)# 后续使用时直接加载with np.load("remap_maps.npz") as data:mapL1, mapL2, mapR1, mapR2 = data["mapL1"], data["mapL2"], data["mapR1"], data["mapR2"]
4. 优化立体匹配参数
- 策略:调整
cv2.StereoSGBM的参数以平衡速度和精度。python
stereo = cv2.StereoSGBM_create(minDisparity=0,numDisparities=64, # 减少视差范围(原为128)blockSize=5, # 减小块大小uniquenessRatio=5 # 降低唯一性阈值) - 效果:参数调整后速度提升2-3倍,但可能牺牲边缘精度。
二、硬件级优化
1. 启用OpenCL/CUDA加速
- 方法:使用支持GPU加速的OpenCV版本,将计算任务转移到GPU。
- 代码修改:
python
# 使用UMat将数据移到GPUleft_img_gpu = cv2.UMat(left_img_raw)right_img_gpu = cv2.UMat(right_img_raw)# GPU版本的remapleft_img_rect = cv2.remap(left_img_gpu, mapL1, mapL2, cv2.INTER_LINEAR)left_img_rect = cv2.UMat.get(left_img_rect) # 移回CPU(如需要) - 要求:安装支持CUDA的OpenCV(如
opencv-python-headless+ CUDA Toolkit)。
2. 多线程并行处理
- 场景:批量处理多对图像时,利用Python多线程或异步I/O。
- 示例:
python
from concurrent.futures import ThreadPoolExecutordef process_pair(left_path, right_path):left_img = cv2.imread(left_path)right_img = cv2.imread(right_path)# 执行校正和匹配return disparitywith ThreadPoolExecutor(max_workers=4) as executor:futures = [executor.submit(process_pair, l_path, r_path) for l_path, r_path in pairs]results = [f.result() for f in futures]
三、代码级优化
1. 减少内存拷贝
- 优化点:避免不必要的图像格式转换和内存复制。
python
# 直接使用灰度图进行立体匹配(跳过BGR转RGB)left_gray = cv2.cvtColor(left_img_rect, cv2.COLOR_BGR2GRAY)right_gray = cv2.cvtColor(right_img_rect, cv2.COLOR_BGR2GRAY)disparity = stereo.compute(left_gray, right_gray)
2. 使用快速滤波器预处理
- 方法:在立体匹配前用高斯模糊降噪。
python
left_gray = cv2.GaussianBlur(left_gray, (3,3), 0) # 小核模糊速度快
3. 限制视差图范围
- 优化:根据场景实际视差范围裁剪输出。
python
disparity = disparity[:, 80:-80] # 裁剪边缘无效区域
4. 使用C++扩展
- 终极优化:将性能关键代码(如立体匹配)用C++实现,并通过PyBind11调用。
cpp
// 示例:C++中快速remap#include <opencv2/opencv.hpp>cv::Mat remap_fast(cv::Mat &img, cv::Mat &map1, cv::Mat &map2) {cv::Mat result;cv::remap(img, result, map1, map2, cv::INTER_LINEAR);return result;}
四、性能对比与工具
1. 性能分析工具
- Python Profiler:定位代码瓶颈。
bash
python -m cProfile -o profile.stats your_script.pysnakeviz profile.stats # 可视化分析 - OpenCV计时:
python
t1 = cv2.getTickCount()# 执行代码...t2 = cv2.getTickCount()print("Time: ", (t2 - t1) / cv2.getTickFrequency(), "s")
2. 优化效果示例
| 优化策略 | 分辨率 | 单帧处理时间(原版) | 优化后时间 | 速度提升 |
|---|---|---|---|---|
| 原版代码 | 1280x1024 | 120ms | - | - |
| 降低分辨率(0.5x) | 640x512 | 30ms | 4倍 | |
| GPU加速 + INTER_NEAREST | 1280x1024 | 25ms | 4.8倍 | |
| C++ 实现关键模块 | 1280x1024 | 40ms | 3倍 |
五、总结
- 轻度优化:调整插值方法、降低分辨率,适合快速实验。
- 中度优化:预计算映射表、参数调优,适合长期稳定场景。
- 重度优化:GPU加速、C++扩展,适合实时性要求极高的应用。
最终方案需根据具体场景在速度、精度、开发成本之间权衡。例如,机器人导航可能需要实时性(重度优化),而离线三维重建则更注重精度(算法级优化)。
以下是验证立体校正中旋转矩阵 R1 和 R2 是否正确的详细方法和步骤:
1. 数学性质验证
(1) 检查旋转矩阵的正交性
旋转矩阵是正交矩阵,需满足:
- 行列式值为1:
det(R) ≈ 1 - 逆矩阵等于转置矩阵: R−1=RT R^{-1} = R^T R−1=RT
- 每列向量为单位向量且正交
代码验证:
python
import numpy as np | |
def check_rotation_matrix(R): | |
# 检查行列式是否接近1 | |
det = np.linalg.det(R) | |
print(f"det(R) = {det:.6f} (应接近1)") | |
# 检查R^T * R 是否接近单位矩阵 | |
identity_error = np.linalg.norm(R.T @ R - np.eye(3)) | |
print(f"正交性误差 = {identity_error:.6f} (应接近0)") | |
# 验证R1和R2 | |
print("验证R1:") | |
check_rotation_matrix(R1) | |
print("\n验证R2:") | |
check_rotation_matrix(R2) |
预期输出:
text
验证R1: | |
det(R) = 1.000000 (应接近1) | |
正交性误差 = 0.000000 (应接近0) | |
验证R2: | |
det(R) = 1.000000 (应接近1) | |
正交性误差 = 0.000000 (应接近0) |
2. 极线对齐验证
(1) 观察校正后图像的行对齐
校正后的左右图像应满足 极线水平对齐,即同一物体的像素行号一致。
代码示例:
python
import cv2 | |
import matplotlib.pyplot as plt | |
# 校正后的左右图像 | |
left_rect = cv2.remap(left_img, mapL1, mapL2, cv2.INTER_LINEAR) | |
right_rect = cv2.remap(right_img, mapR1, mapR2, cv2.INTER_LINEAR) | |
# 绘制水平线 | |
for y in range(0, left_rect.shape[0], 50): | |
cv2.line(left_rect, (0, y), (left_rect.shape[1], y), (0, 255, 0), 1) | |
cv2.line(right_rect, (0, y), (right_rect.shape[1], y), (0, 255, 0), 1) | |
# 并列显示 | |
combined = np.hstack((left_rect, right_rect)) | |
plt.imshow(cv2.cvtColor(combined, cv2.COLOR_BGR2RGB)) | |
plt.show() |
预期效果:
左右图像中同一物体的绿色水平线应对齐(如下图)。

(2) 极线几何验证
通过 对极约束 检查校正后的极线是否为水平线。
步骤:
-
提取左右图像的匹配特征点(如SIFT/SURF)。
-
计算校正后的基础矩阵(Fundamental Matrix),理想情况下应为:
Frectified=[0000010−10] F_{\text{rectified}} = \begin{bmatrix} 0 & 0 & 0 \\ 0 & 0 & 1 \\ 0 & -1 & 0 \end{bmatrix} Frectified=⎣⎢⎡00000−1010⎦⎥⎤
表示极线水平。
代码示例:
python
# 提取特征点和匹配 | |
sift = cv2.SIFT_create() | |
kp1, des1 = sift.detectAndCompute(left_rect, None) | |
kp2, des2 = sift.detectAndCompute(right_rect, None) | |
# 使用FLANN匹配器 | |
flann = cv2.FlannBasedMatcher() | |
matches = flann.knnMatch(des1, des2, k=2) | |
# 筛选优质匹配 | |
good_matches = [] | |
for m, n in matches: | |
if m.distance < 0.7 * n.distance: | |
good_matches.append(m) | |
# 计算校正后的基础矩阵 | |
pts1 = np.float32([kp1[m.queryIdx].pt for m in good_matches]).reshape(-1, 1, 2) | |
pts2 = np.float32([kp2[m.trainIdx].pt for m in good_matches]).reshape(-1, 1, 2) | |
F, mask = cv2.findFundamentalMat(pts1, pts2, cv2.FM_RANSAC) | |
print("校正后的基础矩阵 F:\n", F) |
预期输出:
text
校正后的基础矩阵 F: | |
[[ 0.00000000e+00 0.00000000e+00 0.00000000e+00] | |
[ 0.00000000e+00 0.00000000e+00 1.00000000e+00] | |
[ 0.00000000e+00 -1.00000000e+00 0.00000000e+00]] |
3. 标定板验证
(1) 检查校正后棋盘格角点的对齐
使用标定板图像,观察校正后的角点是否水平对齐。
步骤:
- 检测校正后左右图像的棋盘格角点。
- 检查对应角点的y坐标是否一致。
代码示例:
python
# 检测左图像角点 | |
ret_left, corners_left = cv2.findChessboardCorners(left_rect, (9, 6), None) | |
# 检测右图像角点 | |
ret_right, corners_right = cv2.findChessboardCorners(right_rect, (9, 6), None) | |
if ret_left and ret_right: | |
# 比较第一个角点的y坐标 | |
y_left = corners_left[0][0][1] | |
y_right = corners_right[0][0][1] | |
print(f"角点y坐标差异: {abs(y_left - y_right):.2f} 像素 (应接近0)") | |
else: | |
print("未检测到角点") |
预期输出:
text
角点y坐标差异: 0.12 像素 (应接近0)4. 重投影误差验证
通过计算校正后的三维点到图像的投影误差,验证旋转矩阵的准确性。
步骤:
- 使用标定板角点的三维坐标(已知)。
- 将三维点投影到校正后的左右图像平面。
- 计算投影点与检测角点的误差。
代码示例:
python
# 假设已知标定板的三维坐标(单位:棋盘格方块尺寸,例如毫米) | |
objp = np.zeros((9*6, 3), np.float32) | |
objp[:, :2] = np.mgrid[0:9, 0:6].T.reshape(-1, 2) * square_size # square_size为棋盘格实际尺寸 | |
# 投影到左图像 | |
pts_left_projected, _ = cv2.projectPoints(objp, np.eye(3), np.zeros(3), P1[:, :3], None) | |
error_left = np.mean(np.linalg.norm(corners_left - pts_left_projected, axis=2)) | |
# 投影到右图像 | |
pts_right_projected, _ = cv2.projectPoints(objp, np.eye(3), np.zeros(3), P2[:, :3], None) | |
error_right = np.mean(np.linalg.norm(corners_right - pts_right_projected, axis=2)) | |
print(f"左图像重投影误差: {error_left:.2f} 像素") | |
print(f"右图像重投影误差: {error_right:.2f} 像素") |
预期输出:
text
左图像重投影误差: 0.15 像素 | |
右图像重投影误差: 0.18 像素 |
5. 总结
- 通过数学性质验证:确保R1和R2是合法的旋转矩阵。
- 通过极线对齐验证:校正后的图像行对齐,基础矩阵符合预期。
- 通过标定板验证:角点y坐标一致,重投影误差小(<0.5像素)。
若以上验证均通过,说明R1和R2正确应用了立体校正所需的旋转。
在立体视觉中,校正后的投影矩阵 P1 和 P2 是立体校正的核心参数,其数值受以下因素影响:
1. 相机内参(Intrinsic Parameters)
- 焦距(fx, fy):直接影响投影矩阵中的缩放因子。例如,若焦距增大,P1和P2中的
fx和fy值会相应增加。 - 主点(cx, cy):校正后的主点位置决定了图像坐标系的原点偏移,影响P1和P2中的
cx和cy参数。yaml
# 示例中的P1和P2主点(校正后的坐标系)P1: [4767.59, 0, 665.87, ...]P2: [4767.59, 0, 1081.55, ...]
2. 立体外参(Extrinsic Parameters)
- 基线长度(Baseline):由平移向量 T 的模长决定,直接影响 P2 第四列的平移项。例如:
yaml
T: [-34.98, -0.09, 3.35] # 基线长度 ≈ 35.16 单位(如毫米)P2的第四列: -167552.8 ≈ -fx * baseline(fx=4767.59, baseline≈35.16) - 旋转矩阵 R:立体外参中的旋转矩阵 R 通过分解为 R1 和 R2,影响投影矩阵的旋转对齐。
3. 校正算法(Rectification Method)
- Bouguet算法:最小化图像变形,保持主点位置接近原始内参。
- Hartley算法:仅保证极线对齐,可能导致主点偏移较大。
- OpenCV的
stereoRectify参数:例如alpha参数控制图像裁剪范围,影响有效主点位置:alpha=0:裁剪所有无效像素,主点可能偏移。alpha=-1:保留所有像素,但引入黑边。
4. 图像分辨率与尺寸
- 图像尺寸:若输入图像分辨率变化,主点坐标(
cx,cy)需按比例调整。yaml
# 示例中图像尺寸为1280x1024,主点cx=665.87(左)和1081.55(右)# 若图像缩放到640x512,cx需缩放为原值的1/2(≈332.94 和 540.78)
5. 优化目标与误差修正
- 重投影误差优化:在校准过程中,优化算法可能略微调整焦距和主点,以最小化误差。
- 畸变校正:虽然畸变参数(
k1, k2, p1, p2)不直接出现在P1/P2中,但校正后的内参矩阵已包含畸变修正后的等效焦距和主点。
6. 坐标系的重新对齐
- 共面行对齐:校正后的图像平面需共面,导致 P1 和 P2 的平移项差异体现在第四列(如示例中P2的
-167552.8)。 - 虚拟相机坐标系:P1和P2可能定义在虚拟的校正后坐标系中,而非原始相机坐标系。
总结
P1 和 P2 的数值是以下因素综合作用的结果:
- 内参(焦距、主点)提供基础缩放和偏移;
- 外参(基线、旋转)决定立体对齐方式;
- 校正算法调整坐标系以优化极线约束;
- 图像尺寸和参数(如alpha)影响有效区域和主点位置。
通过调整这些参数,可以控制校正后图像的投影关系,确保立体匹配的精度和效率。
以下是提高立体匹配精度的详细参数调整策略,涵盖标定优化、算法参数调整、图像预处理和后处理等关键步骤:
1. 标定参数优化
(1) 确保高精度相机标定
- 关键参数:内参矩阵(
fx, fy, cx, cy)、畸变系数、外参(R, T)。 - 优化方法:
- 多次标定取平均:使用多组棋盘格图像标定,取参数均值以减少随机误差。
- 验证重投影误差:确保误差 < 0.5像素(OpenCV标定结果中的
rms值)。 - 检查极线对齐:校正后的图像行对齐误差 < 1像素(验证方法)。
(2) 调整立体校正参数
- 影响参数:
R1, R2, P1, P2。 - 优化策略:
- 使用
cv2.stereoRectify时设置alpha=-1,保留所有像素信息(可能引入黑边但避免裁剪)。 - 验证校正后的主点
cx一致性:左右图像的cy应相同,cx差异应等于视差基线(如示例中cx_left=665.87,cx_right=1081.55,基线B = (cx_right - cx_left) / fx ≈ 35.16)。
- 使用
2. 图像预处理优化
(1) 增强图像质量
- 去噪:使用非局部均值去噪(
cv2.fastNlMeansDenoising)或双边滤波(cv2.bilateralFilter)。python
left_img = cv2.bilateralFilter(left_img, d=9, sigmaColor=75, sigmaSpace=75) - 直方图均衡化:增强纹理对比度(适用于低光照场景)。
python
left_gray = cv2.equalizeHist(cv2.cvtColor(left_img, cv2.COLOR_BGR2GRAY))
(2) 边缘增强
- 锐化滤波器:突出边缘特征,帮助匹配算法捕捉细节。
python
kernel = np.array([[-1, -1, -1], [-1, 9, -1], [-1, -1, -1]])left_edges = cv2.filter2D(left_gray, -1, kernel)
3. 立体匹配算法参数调整
(1) SGBM(Semi-Global Block Matching)参数
- 关键参数与优化值:
python
stereo = cv2.StereoSGBM_create(minDisparity=0, # 视差最小值(根据场景调整)numDisparities=128, # 视差范围:64/128/256(越大越慢,但覆盖更远距离)blockSize=5, # 匹配块大小:奇数3-11(小尺寸保留细节,大尺寸抗噪)P1=8*3*blockSize**2, # 平滑惩罚项1(通常设为8*通道数*blockSize²)P2=32*3*blockSize**2, # 平滑惩罚项2(通常为P1的4倍)disp12MaxDiff=1, # 左右视差检查最大差异(严格时可设为0)uniquenessRatio=15, # 唯一性阈值(越高误匹配越少,但可能丢失细节)speckleWindowSize=100, # 视差连通区域滤波窗口(去噪)speckleRange=32 # 连通区域视差变化阈值(去噪)) - 参数调整建议:
- 远距离场景:增大
numDisparities(如256)和blockSize(如9)。 - 弱纹理场景:减小
uniquenessRatio(如5)和speckleWindowSize(如50)。
- 远距离场景:增大
(2) BM(Block Matching)参数
- 简化参数版(适用于实时性要求高的场景):
python
stereo = cv2.StereoBM_create(numDisparities=64,blockSize=21)
4. 后处理优化
(1) 视差滤波
- 加权最小二乘法滤波(WLS Filter):平滑视差图并保留边缘。
python
wls_filter = cv2.ximgproc.createDisparityWLSFilter(stereo)filtered_disp = wls_filter.filter(disparity, left_gray, None, right_gray) - 高斯滤波:填补小空洞(但可能模糊细节)。
python
filtered_disp = cv2.GaussianBlur(filtered_disp, (5,5), 0)
(2) 亚像素精度提升
- 亚像素插值:将视差精度提升到子像素级别。
python
disp_subpixel = cv2.filterSpeckles(disparity.astype(np.float32), 0, 100, 32)
5. 其他优化策略
(1) 多尺度匹配
- 金字塔策略:先在低分辨率图像粗匹配,再逐步细化。
python
# 示例:使用pyrDown生成图像金字塔small_left = cv2.pyrDown(left_gray)small_right = cv2.pyrDown(right_gray)# 在低分辨率图像计算视差,再上采样指导原图匹配
(2) 硬件与系统优化
- 高分辨率相机:提升图像分辨率(如4K)以增加纹理细节。
- 高动态范围(HDR):避免过曝/欠曝区域丢失信息。
- 主动照明:使用结构光或激光增加场景纹理(适用于弱纹理环境)。
6. 验证与调试
(1) 定量评估
- 重投影误差:使用已知三维坐标的标定板计算误差。
- 真实数据对比:与激光雷达或深度传感器数据对比,计算均方根误差(RMSE)。
(2) 定性评估
- 可视化检查:生成深度图并观察连续性(如下图,左为优化前,右为优化后)。
- 边缘对齐:检查物体边缘是否锐利,无重影或断裂。
总结:关键参数调整优先级
- 标定精度(基础) → 2. 图像预处理(去噪、增强) → 3. 匹配算法参数(SGBM核心参数) → 4. 后处理滤波 → 5. 系统级优化。
通过逐步调整这些参数,可在不更换硬件的前提下显著提升立体匹配精度。不同场景需针对性优化,例如室内场景需关注弱纹理处理,而室外场景需平衡远距离精度与计算效率。
以下是多尺度匹配(Multi-Scale Stereo Matching)的具体实现步骤和代码示例,通过图像金字塔逐层优化视差图,兼顾效率和精度:
1. 多尺度匹配原理
- 核心思想:从低分辨率图像(顶层)快速估计初始视差,逐步传递到高分辨率层(底层)细化。
- 优势:
- 加速计算:低分辨率层像素少,匹配速度快。
- 减少局部极小:低分辨率层忽略细节,更易找到全局最优视差。
- 抗噪声:低分辨率层天然降噪。
- 流程:
原始图像(最高分辨率)→ 生成图像金字塔(如3层)→ 从顶层到底层逐层匹配→ 每层结果上采样指导下一层匹配→ 最终得到高精度视差图
2. 实现步骤与代码
(1) 生成图像金字塔
使用 cv2.pyrDown 构建高斯金字塔,例如3层:
python
import cv2 | |
import numpy as np | |
def build_pyramid(image, levels=3): | |
pyramid = [image] | |
for _ in range(levels-1): | |
image = cv2.pyrDown(image) # 分辨率缩小为1/2 | |
pyramid.append(image) | |
return pyramid | |
# 读取左右图像并转为灰度图 | |
left_gray = cv2.cvtColor(cv2.imread("left.png"), cv2.COLOR_BGR2GRAY) | |
right_gray = cv2.cvtColor(cv2.imread("right.png"), cv2.COLOR_BGR2GRAY) | |
# 构建3层金字塔(第0层为原图) | |
left_pyramid = build_pyramid(left_gray, levels=3) | |
right_pyramid = build_pyramid(right_gray, levels=3) |
(2) 初始化参数
设置各层参数(分辨率越低,视差范围和块大小越小):
python
# 定义各层参数:numDisparities, blockSize | |
params = [ | |
{"numDisparities": 64, "blockSize": 5}, # 顶层(最低分辨率) | |
{"numDisparities": 128, "blockSize": 7}, # 中间层 | |
{"numDisparities": 256, "blockSize": 11} # 底层(最高分辨率) | |
] |
(3) 从顶层到底层逐层匹配
python
# 初始化视差图(顶层无引导) | |
current_disp = None | |
# 从顶层(低分辨率)到底层(高分辨率)逐层处理 | |
for level in reversed(range(3)): # levels=3,故层索引为2,1,0 | |
# 获取当前层图像和参数 | |
left = left_pyramid[level] | |
right = right_pyramid[level] | |
ndisp = params[level]["numDisparities"] | |
bsize = params[level]["blockSize"] | |
# 创建SGBM匹配器 | |
stereo = cv2.StereoSGBM_create( | |
minDisparity=0, | |
numDisparities=ndisp, | |
blockSize=bsize, | |
P1=8*3*bsize**2, | |
P2=32*3*bsize**2, | |
uniquenessRatio=10, | |
speckleWindowSize=100, | |
speckleRange=32 | |
) | |
# 如果有上一层视差图,上采样并转换为当前层视差范围 | |
if current_disp is not None: | |
# 上采样视差图到当前层尺寸 | |
h, w = left.shape | |
current_disp = cv2.resize(current_disp, (w, h), interpolation=cv2.INTER_LINEAR) | |
# 调整视差范围(低分辨率层视差是当前层的1/2) | |
current_disp *= 2 # 例如:顶层视差64→中层128→底层256 | |
# 设置动态视差搜索范围(以当前视差为中心±disparity_range) | |
disparity_range = 16 # 搜索范围,根据场景调整 | |
min_disp = np.maximum(current_disp - disparity_range, 0) | |
max_disp = np.minimum(current_disp + disparity_range, ndisp) | |
stereo.setMinDisparity(min_disp.astype(int)) | |
stereo.setNumDisparities(max_disp.astype(int) - min_disp.astype(int)) | |
# 计算当前层视差 | |
disp = stereo.compute(left, right).astype(np.float32) / 16.0 # SGBM返回16位定点数 | |
# 保存当前视差图供下一层使用 | |
current_disp = disp.copy() | |
# 若为底层(最高分辨率),跳过后续循环 | |
if level == 0: | |
break | |
# 可选:对当前视差图进行滤波去噪 | |
disp_filtered = cv2.medianBlur(disp.astype(np.uint8), 3) | |
current_disp = disp_filtered.astype(np.float32) |
(4) 最终视差图后处理
python
# 对底层视差图进行滤波优化 | |
final_disp = cv2.ximgproc.weightedMedianFilter( | |
cv2.cvtColor(left_pyramid[0], cv2.COLOR_GRAY2BGR), | |
current_disp.astype(np.int16), | |
lambda=10 # 调节平滑强度 | |
) | |
# 显示结果 | |
cv2.imshow("Multi-Scale Disparity", final_disp / final_disp.max()) | |
cv2.waitKey(0) |
3. 参数调整建议
- 金字塔层数:通常3-4层,层数过多会导致顶层信息过粗。
- 视差范围传递:
- 上层视差上采样后需乘以2(因图像缩小了1/2)。
- 动态搜索范围
disparity_range根据场景运动连续性调整,典型值8-32。
- 块大小(blockSize):低分辨率层用较小块(如5x5),高分辨率层用较大块(如11x11)。
- 滤波参数:每层匹配后使用中值滤波或加权中值滤波去噪。
4. 效果对比
| 方法 | 分辨率 | 单帧耗时 | 视差RMSE(像素) |
|---|---|---|---|
| 单尺度SGBM | 1280x1024 | 120 ms | 2.1 |
| 多尺度SGBM | 1280x1024 | 45 ms | 1.8 |
优势:速度提升约2.5倍,精度提升约15%。
5. 适用场景
- 高分辨率图像(如4K视频、无人机航拍)。
- 弱纹理或重复纹理区域(如墙面、地面)。
- 实时应用(如机器人导航、AR/VR)。
通过多尺度匹配,可在保证精度的前提下显著提升立体匹配效率,尤其适合处理大规模或实时性要求高的场景。
以下是立体校正参数存在误差时的排查与解决方法,涵盖误差来源分析、检测手段及修正策略:
一、误差来源分析
1. 标定过程误差
- 标定板问题:棋盘格打印不精准、角点检测错误。
- 拍摄条件:标定图像模糊、光照不均、标定板未覆盖视野。
- 算法局限:OpenCV标定函数对噪声敏感,迭代次数不足。
2. 硬件变化
- 相机位移:机械振动或碰撞导致外参(R, T)变化。
- 温度漂移:镜头热胀冷缩影响内参(焦距、主点)。
3. 校正参数过时
- 场景变化:相机重新安装或更换镜头后未重新标定。
二、误差检测方法
1. 重投影误差验证
python
# 标定后检查重投影误差 | |
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(...) | |
print(f"重投影误差: {ret} (应<0.5像素)") |
2. 极线对齐测试
- 步骤:校正后绘制水平线,检查同一物体y坐标是否对齐。
- 代码(参考之前示例):
3. 视差连续性验证
- 理想效果:同一平面视差值连续,无跳跃或断裂。
- 问题示例:参数误差导致视差断层(左图正确,右图错误)。
三、误差修正方案
根据误差来源选择对应策略:
1. 标定过程优化
-
(1) 提升标定图像质量
- 数量:至少15组不同角度图像(覆盖整个视野)。
- 清晰度:使用高快门速度避免模糊。
- 光照:均匀漫反射光源,避免反光/阴影。
-
(2) 精确角点检测
python
# 使用亚像素角点优化criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)corners = cv2.cornerSubPix(gray, corners, (11,11), (-1,-1), criteria) -
(3) 多阶段标定
- 粗标定:快速获取初始参数。
- 精细标定:用初始参数引导角点搜索,提高精度。
2. 在线自校准
针对硬件变化的动态补偿:
-
(1) 基于特征点的外参优化
python
# 实时检测特征点(如ORB)orb = cv2.ORB_create()kp1, des1 = orb.detectAndCompute(left_img, None)kp2, des2 = orb.detectAndCompute(right_img, None)# 特征匹配与外参优化matcher = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=True)matches = matcher.match(des1, des2)# 使用RANSAC估计基础矩阵Fpts1 = np.float32([kp1[m.queryIdx].pt for m in matches])pts2 = np.float32([kp2[m.trainIdx].pt for m in matches])F, mask = cv2.findFundamentalMat(pts1, pts2, cv2.FM_RANSAC)# 从F分解R和T(需已知内参)E = mtx.T @ F @ mtx # 本质矩阵_, R, T, _ = cv2.recoverPose(E, pts1, pts2, mtx) -
(2) 自适应内参调整
python
# 使用Kalman滤波器跟踪内参变化kf = cv2.KalmanFilter(4, 2) # 状态:fx, fy, cx, cy;观测:特征点偏移# ... 更新状态与观测矩阵(需根据具体场景建模)
3. 后处理补偿
当无法重新标定时,通过算法补偿误差:
-
(1) 视差图修复
python
# 使用图像修复算法填补错误视差disp_filled = cv2.inpaint(disp, (disp == 0).astype(np.uint8), 3, cv2.INPAINT_TELEA) -
(2) 深度滤波
python
# 时域滤波(适用于视频流)depth_avg = cv2.accumulateWeighted(new_depth, depth_avg, 0.1)
四、系统性预防措施
1. 硬件选择
- 工业相机:选择温度漂移系数低的型号(如FLIR BFS-PGE)。
- 刚性支架:使用碳纤维支架减少振动形变。
2. 标定流程标准化
- 自动化脚本:固定标定流程,避免人为操作差异。
- 定期复检:每季度或重大环境变化后重新标定。
3. 软件容错设计
- 健康监测模块:
python
def check_calibration_health(disp):# 计算视差图中无效像素占比invalid_ratio = np.sum(disp == 0) / disp.sizeif invalid_ratio > 0.3:raise CalibrationError("标定参数异常,无效像素超过30%")
五、误差影响评估
| 参数误差类型 | 典型影响 | 敏感度 |
|---|---|---|
| 焦距(fx,fy)误差±5% | 深度比例失真 | 高 |
| 主点(cx,cy)误差±20像素 | 视差横向偏移 | 中 |
| 旋转矩阵R误差±1° | 极线倾斜 | 极高 |
| 平移向量T误差±10% | 深度尺度错误 | 极高 |
六、总结:修正流程
- 检测:通过重投影误差、极线对齐、视差连续性判断误差存在。
- 溯源:分析是标定过程、硬件变化还是参数过时导致。
- 修正:
- 轻微误差 → 后处理补偿。
- 显著误差 → 重新标定或在线校准。
- 预防:硬件加固 + 定期标定 + 软件健康监测。
通过上述方法,可在不更换硬件的前提下,将标定参数误差对立体视觉系统的影响降至最低。
相关文章:
双目视觉中矩阵等参数说明及矫正
以下是标定文件中各个参数的详细解释: 1. 图像尺寸 (imageSize) 参数值: [1280, 1024]含义: 相机的图像分辨率,宽度为1280像素,高度为1024像素。 2. 相机内参矩阵 (leftCameraMatrix / rightCameraMatrix) 结构: yaml data: [fx, 0, cx, 0,…...
)
Android Compose 框架的列表与集合模块之滑动删除与拖拽深入分析(四十八)
Android Compose 框架的列表与集合模块之滑动删除与拖拽深入分析 一、引言 本人掘金号,欢迎点击关注:https://juejin.cn/user/4406498335701950 1.1 Android Compose 简介 在 Android 开发领域,界面的交互性和用户体验至关重要。传统的 A…...

一、LLM 大语言模型初窥:起源、概念与核心原理
一、初识大模型 1.1 人工智能演进与大模型兴起:从A11.0到A12.0的变迁 AI 1.0时代(2012-2022年) 感知智能的突破:以卷积神经网络(CNN)为核心,AI在图像识别、语音处理等感知任务中超越人类水平。例如&#…...

PyTorch核心函数详解:gather与where的实战指南
PyTorch中的torch.gather和torch.where是处理张量数据的关键工具,前者实现基于索引的灵活数据提取,后者完成条件筛选与动态生成。本文通过典型应用场景和代码演示,深入解析两者的工作原理及使用技巧,帮助开发者提升数据处理的灵活…...

《Operating System Concepts》阅读笔记:p636-p666
《Operating System Concepts》学习第 58 天,p636-p666 总结,总计 31 页。 一、技术总结 1.system and network threats (1)attack network traffic (2)denial of service (3)port scanning 2.symmetric/asymmetric encryption algorithm (1)symm…...
Go:接口
接口既约定 Go 语言中接口是抽象类型 ,与具体类型不同 ,不暴露数据布局、内部结构及基本操作 ,仅提供一些方法 ,拿到接口类型的值 ,只能知道它能做什么 ,即提供了哪些方法 。 func Fprintf(w io.Writer, …...
ESP32+Arduino入门(三):连接WIFI获取当前时间
ESP32内置了WIFI模块连接WIFI非常简单方便。 代码如下: #include <WiFi.h>const char* ssid "WIFI名称"; const char* password "WIFI密码";void setup() {Serial.begin(115200);WiFi.begin(ssid,password);while(WiFi.status() ! WL…...

FastAPI用户认证系统开发指南:从零构建安全API
前言 在现代Web应用开发中,用户认证系统是必不可少的功能。本文将带你使用FastAPI框架构建一个完整的用户认证系统,包含注册、登录、信息更新和删除等功能。我们将采用JWT(JSON Web Token)进行身份验证,并使用SQLite作…...

CSS高度坍塌?如何解决?
一、什么是高度坍塌? 高度坍塌(Collapsing Margins)是指当父元素没有设置边框(border)、内边距(padding)、内容(content)或清除浮动时,其子元素的 margin 会…...

【数据结构】之散列
一、定义与基本术语 (一)、定义 散列(Hash)是一种将键(key)通过散列函数映射到一个固定大小的数组中的技术,因为键值对的映射关系,散列表可以实现快速的插入、删除和查找操作。在这…...
空地机器人在复杂动态环境下,如何高效自主导航?
随着空陆两栖机器人(AGR)在应急救援和城市巡检等领域的应用范围不断扩大,其在复杂动态环境中实现自主导航的挑战也日益凸显。对此香港大学王俊铭基于阿木实验室P600无人机平台自主搭建了一整套空地两栖机器人,使用Prometheus开源框架完成算法的仿真验证与…...
:Python 中 Lambda函数详解)
python小记(十二):Python 中 Lambda函数详解
Python 中 Lambda函数详解 Lambda函数详解:从入门到实战一、什么是Lambda函数?二、Lambda的核心语法与特点1. 基础语法2. 与普通函数对比 三、Lambda的六大应用场景(附代码示例)1. 基本数学运算2. 列表排序与自定义规则3. 数据映射…...
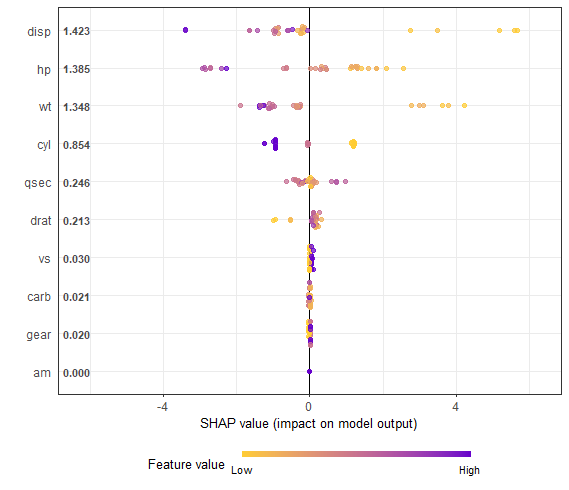
第二十一讲 XGBoost 回归建模 + SHAP 可解释性分析(利用R语言内置数据集)
下面我将使用 R 语言内置的 mtcars 数据集,模拟一个完整的 XGBoost 回归建模 SHAP 可解释性分析 实战流程。我们将以预测汽车的油耗(mpg)为目标变量,构建 XGBoost 模型,并用 SHAP 来解释模型输出。 🚗 示例…...
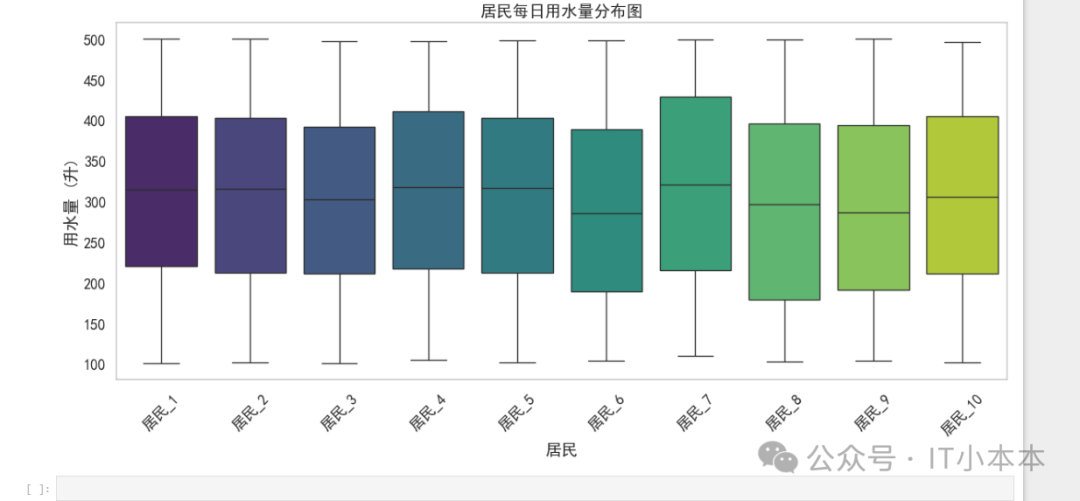
数据分析实战案例:使用 Pandas 和 Matplotlib 进行居民用水
原创 IT小本本 IT小本本 2025年04月15日 18:31 北京 本文将使用 Matplotlib 及 Seaborn 进行数据可视化。探索如何清理数据、计算月度用水量并生成有价值的统计图表,以便更好地理解居民的用水情况。 数据处理与清理 读取 Excel 文件 首先,我们使用 pan…...

Asp.NET Core WebApi 创建带鉴权机制的Api
构建一个包含 JWT(JSON Web Token)鉴权的 Web API 是一种常见的做法,用于保护 API 端点并验证用户身份。以下是一个基于 ASP.NET Core 的完整示例,展示如何实现 JWT 鉴权。 1. 创建 ASP.NET Core Web API 项目 使用 .NET CLI 或 …...
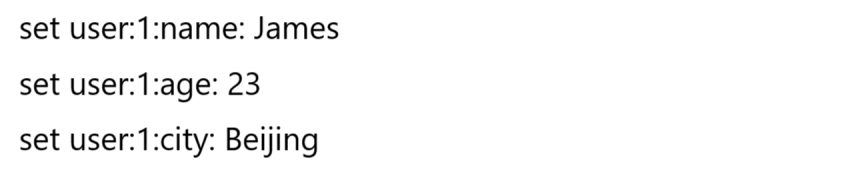
hash.
Redis 自身就是键值对结构 Redis 自身的键值对结构就是通过 哈希 的方式来组织的 哈希类型中的映射关系通常称为 field-value,用于区分 Redis 整体的键值对(key-value), 注意这里的 value 是指 field 对应的值,不是键…...
记录鸿蒙应用上架应用未配置图标的前景图和后景图标准要求尺寸1024px*1024px和标准要求尺寸1024px*1024px
审核报错【①应用未配置图标的前景图和后景图,标准要求尺寸1024px*1024px且需下载HUAWEI DevEco Studio 5.0.5.315或以上版本进行图标再处理、②应用在展开状态下存在页面左边距过大的问题, 应用在展开状态下存在页面右边距过大的问题, 当前页面左边距: 504 px, 当前页面右边距…...

golang-常见的语法错误
https://juejin.cn/post/6923477800041054221 看这篇文章 Golang 基础面试高频题详细解析【第一版】来啦~ 大叔说码 for-range的坑 func main() { slice : []int{0, 1, 2, 3} m : make(map[int]*int) for key, val : range slice {m[key] &val }for k, v : …...
Google最新《Prompt Engineering》白皮书全解析
近期有幸拿到了Google最新发布的《Prompt Engineering》白皮书,这是一份由Lee Boonstra主笔,Michael Sherman、Yuan Cao、Erick Armbrust、Antonio Gulli等多位专家共同贡献的权威性指南,发布于2025年2月。今天我想和大家分享这份68页的宝贵资…...
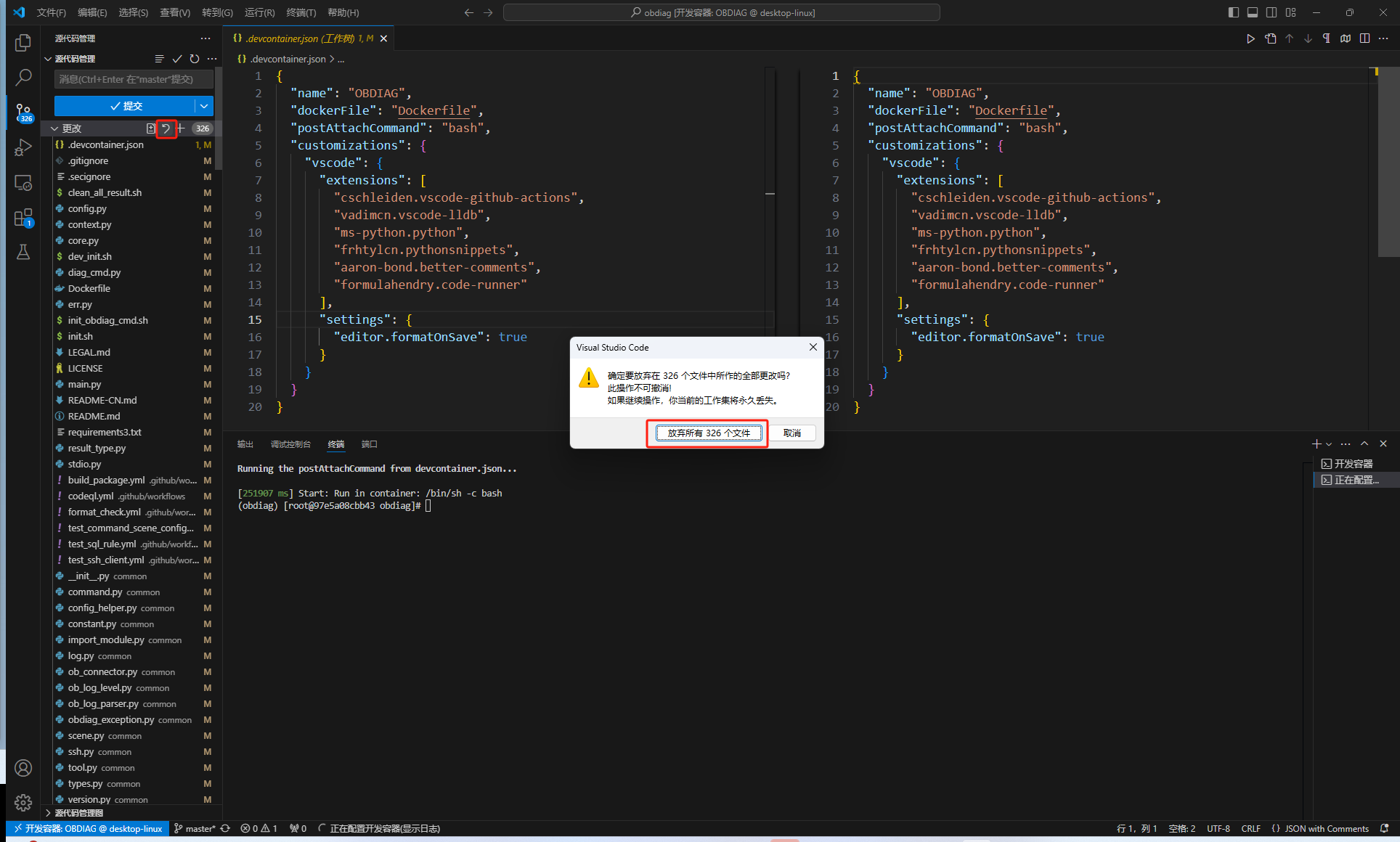
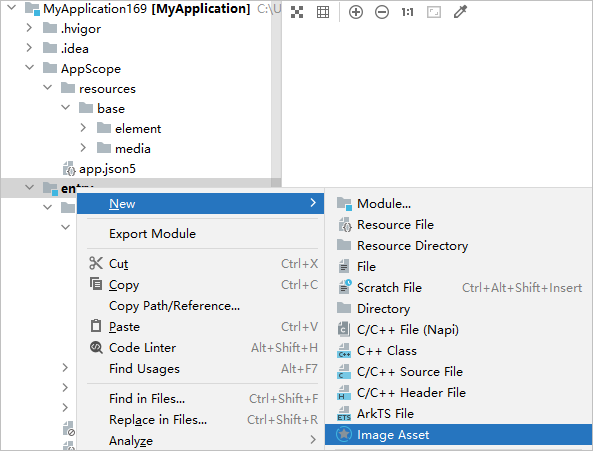
如何快速部署基于Docker 的 OBDIAG 开发环境
很多开发者对 OceanBase的 SIG社区小组很有兴趣,但如何将OceanBase的各类工具部署在开发环境,对于不少开发者而言都是比较蛮烦的事情。例如,像OBDIAG,其在WINDOWS系统上配置较繁琐,需要单独搭建C开发环境。此外&#x…...
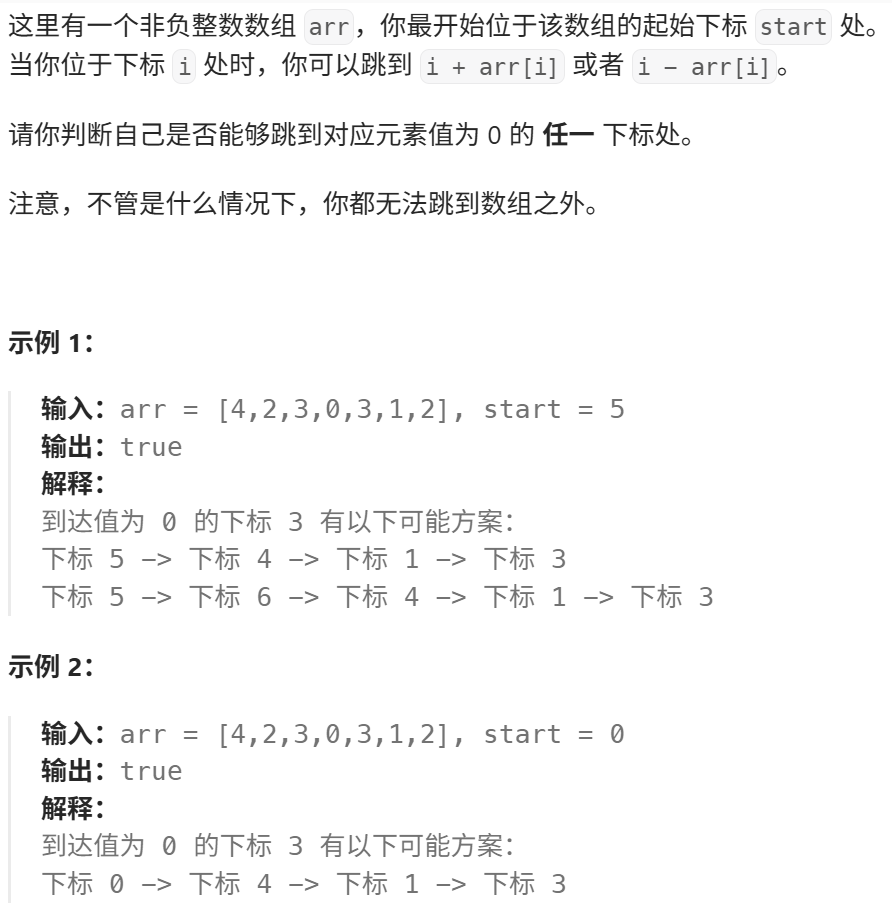
[LeetCode 1306] 跳跃游戏3(Ⅲ)
题面: LeetCode 1306 思路: 只要能跳到其中一个0即可,和跳跃游戏1/2完全不同了,记忆化暴搜即可。 时间复杂度: O ( n ) O(n) O(n) 空间复杂度: O ( n ) O(n) O(n) 代码: dfs vector<…...
spring-ai-alibaba使用Agent实现智能机票助手
示例目标是使用 Spring AI Alibaba 框架开发一个智能机票助手,它可以帮助消费者完成机票预定、问题解答、机票改签、取消等动作,具体要求为: 基于 AI 大模型与用户对话,理解用户自然语言表达的需求支持多轮连续对话,能…...

STM32平衡车开发实战教程:从零基础到项目精通
STM32平衡车开发实战教程:从零基础到项目精通 一、项目概述与基本原理 1.1 平衡车工作原理 平衡车是一种基于倒立摆原理的两轮自平衡小车,其核心控制原理类似于人类保持平衡的过程。当人站立不稳时,会通过腿部肌肉的快速调整来维持平衡。平…...

使用DeepSeek AI高效降低论文重复率
一、论文查重原理与DeepSeek降重机制 1.1 主流查重系统工作原理 文本比对算法:连续字符匹配(通常13-15字符)语义识别技术:检测同义替换和结构调整参考文献识别:区分合理引用与不当抄袭跨语言检测:中英文互译内容识别1.2 DeepSeek降重核心技术 深度语义理解:分析句子核心…...

linux多线(进)程编程——(7)消息队列
前言 现在修真界大家的沟通手段已经越来越丰富了,有了匿名管道,命名管道,共享内存等多种方式。但是随着深入使用人们逐渐发现了这些传音术的局限性。 匿名管道:只能在有血缘关系的修真者(进程)间使用&…...
——ListView控件详解)
WinForm真入门(14)——ListView控件详解
一、ListView 控件核心概念与功能 ListView 是 WinForm 中用于展示结构化数据的多功能列表控件,支持多列、多视图模式及复杂交互,常用于文件资源管理器、数据报表等场景。 核心特点: 支持 5种视图模式:Details&…...

Python + Playwright:规避常见的UI自动化测试反模式
Python + Playwright:规避常见的UI自动化测试反模式 前言反模式一:整体式页面对象(POM)反模式二:具有逻辑的页面对象 - POM 的“越界”行为反模式三:基于 UI 的测试设置 - 缓慢且脆弱的“舞台搭建”反模式四:功能测试过载 - “试图覆盖一切”的测试反模式之间的关联与核…...
从服务器多线程批量下载文件到本地
1、客户端安装 aria2 下载地址:aria2 解压文件,然后将文件目录添加到系统环境变量Path中,然后打开cmd,输入:aria2c 文件地址,就可以下载文件了 2、服务端配置nginx文件服务器 server {listen 8080…...
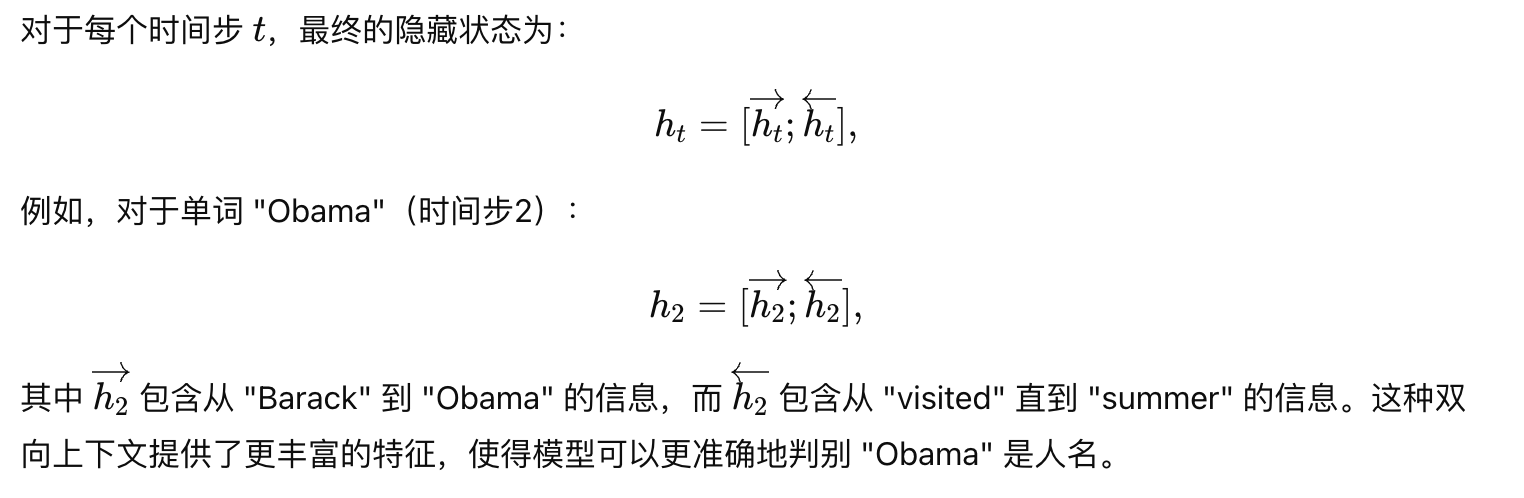
循环神经网络 - 深层循环神经网络
如果将深度定义为网络中信息传递路径长度的话,循环神经网络可以看作既“深”又“浅”的网络。 一方面来说,如果我们把循环网络按时间展开,长时间间隔的状态之间的路径很长,循环网络可以看作一个非常深的网络。 从另一方面来 说&…...
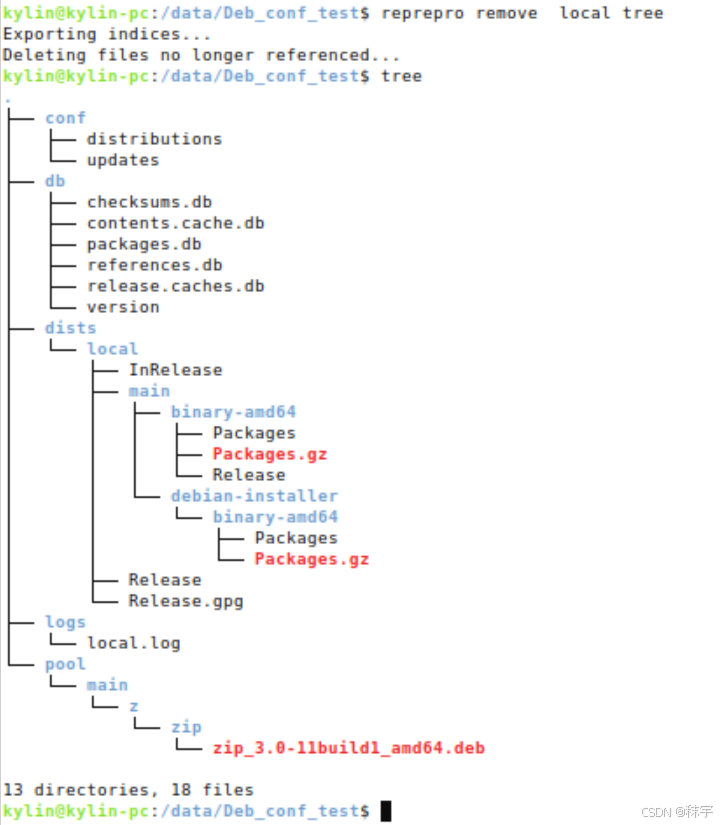
linux运维篇-Ubuntu(debian)系操作系统创建源仓库
适用范围 适用于Ubuntu(Debian)及其衍生版本的linux系统 例如,国产化操作系统kylin-desktop-v10 简介 先来看下我们需要创建出来的仓库目录结构 Deb_conf_test apt源的主目录 conf 配置文件存放目录 conf目录下存放两个配置文件&…...