FreeRTOS菜鸟入门(五)·空闲任务与阻塞延时的实现

目录
1. 实现空闲任务
1.1 定义空闲任务的栈
1.2 定义空闲任务的任务控制块
1.3 创建空闲任务
2. 实现阻塞延时
2.1 vTaskDelay()函数
2.2 修改 vTaskSwitchContext()函数
3. SysTick 中断服务函数
4. SysTick 初始化函数
通过之前我们了解知道,任务体内的延时使用的是软件延时,也就是还是让CPU空等待来达到延时的效果,也就是delay函数,或者使用一个大的循环,只计数不进行任务处理,但是我们在使用 RTOS 的很大优势就是榨干 CPU 的性能,永远不然它闲着,任务如果需要延时也不能让 CPU 空等待来实现延时的效果。
RTOS 中的延时叫阻塞延时,即任务需要延时的时候,任务会放弃 CPU 的使用权,CPU 可以去干其它的事情,当任务延时时间到,重新获取 CPU 使用权,任务继续运行,这样就充分地利用了 CPU 的资源,而不是干等着。
当任务需要延时,进入阻塞状态,那 CPU 又去干什么事情了?
如果没有其它任务可以运行,RTOS 都会为 CPU 创建一个空闲任务,这个时候 CPU 就运行空闲任务。在 FreeRTOS 中,空闲任务是系统在启动调度器的时候创建的优先级最低的任务,空闲任务主体主要是做一些系统内存的清理工作。
在实际应用中,当系统进入空闲任务的时候,可在空闲任务中让单片机进入休眠或者低功耗等操作。
1. 实现空闲任务
目前我们在创建任务时使用的栈和 TCB 都使用的是静态的内存,即需要预先定义好内存,空闲任务也不例外。有关空闲任务的栈和 TCB 需要用到的内存空间均在 main.c 中定义。
1.1 定义空闲任务的栈
空闲任务的栈是一个定义好的数组,大小由 FreeRTOSConfig.h 中定义的宏 configMINIMAL_STACK_SIZE 控制,默认为 128,单位为字,即 512个字节。
/* 定义空闲任务的栈 */
#define configMINIMAL_STACK_SIZE ( ( unsigned short ) 128 )
StackType_t IdleTaskStack[configMINIMAL_STACK_SIZE]; 1.2 定义空闲任务的任务控制块
任务控制块是每一个任务必须的,空闲任务的的任务控制块我们在 main.c 中定义,是一个全局变量:
/* 定义空闲任务的任务控制块 */
TCB_t IdleTaskTCB;1.3 创建空闲任务
当定义好空闲任务的栈,任务控制块后,就可以创建空闲任务。空闲任务在调度器启动函数 vTaskStartScheduler()中创建:
extern TCB_t IdleTaskTCB;
void vApplicationGetIdleTaskMemory( TCB_t **ppxIdleTaskTCBBuffer,StackType_t **ppxIdleTaskStackBuffer,uint32_t *pulIdleTaskStackSize );
void vTaskStartScheduler( void )
{/*=======================创建空闲任务 start=======================*/ TCB_t *pxIdleTaskTCBBuffer = NULL; /* 用于指向空闲任务控制块 */ StackType_t *pxIdleTaskStackBuffer = NULL; /* 用于空闲任务栈起始地址 */ uint32_t ulIdleTaskStackSize; /* 获取空闲任务的内存:任务栈和任务 TCB */ (1) vApplicationGetIdleTaskMemory( &pxIdleTaskTCBBuffer, &pxIdleTaskStackBuffer, &ulIdleTaskStackSize ); /* 创建空闲任务 */ (2) xIdleTaskHandle = xTaskCreateStatic( (TaskFunction_t)prvIdleTask, /* 任务入口 */ (char *)"IDLE", /* 任务名称,字符串形式 */ (uint32_t)ulIdleTaskStackSize , /* 任务栈大小,单位为字 */ (void *) NULL, /* 任务形参 */ (StackType_t *)pxIdleTaskStackBuffer, /* 任务栈起始地址 */ (TCB_t *)pxIdleTaskTCBBuffer ); /* 任务控制块 */
/* 将任务添加到就绪列表 */ (3) vListInsertEnd( &( pxReadyTasksLists[0] ), &( ((TCB_t *)pxIdleTaskTCBBuffer)->xStateListItem ) ); /*==========================创建空闲任务 end=====================*/ /* 手动指定第一个运行的任务 */pxCurrentTCB = &Task1TCB;/* 启动调度器 */if ( xPortStartScheduler() != pdFALSE ){/* 调度器启动成功,则不会返回,即不会来到这里 */}
}(1) : 获取空闲任务的内存 , 即 将 pxIdleTaskTCBBuffer 和 pxIdleTaskStackBuffer 这两个接下来要作为形参传到 xTaskCreateStatic() 函数的指针分别指向空闲任务的 TCB 和栈的起始地址,这个操作由函数 vApplicationGetIdleTaskMemory() 来实现,该函数需要用户自定义。
(2) :调用 xTaskCreateStatic()函数创建空闲任务。
(3) :将空闲任务插入到就绪列表的开头,空闲任务默认的优先级是最低的,即排在就绪列表的开头。
2. 实现阻塞延时
2.1 vTaskDelay()函数
阻塞延时的阻塞是指任务调用该延时函数后,任务会被剥离 CPU 使用权,然后进入阻塞状态,直到延时结束,任务重新获取 CPU 使用权才可以继续运行。在任务阻塞的这段时间,CPU 可以去执行其它的任务,如果其它的任务也在延时状态,那么 CPU 就将运行空闲任务。
void vTaskDelay( const TickType_t xTicksToDelay )
{TCB_t *pxTCB = NULL;/* 获取当前任务的 TCB */pxTCB = pxCurrentTCB; (1)/* 设置延时时间 */pxTCB->xTicksToDelay = xTicksToDelay; (2)/* 任务切换 */taskYIELD(); (3)
}(1):获取当前任务的任务控制块。pxCurrentTCB 是一个在 task.c 定义的全局指针,用于指向当前正在运行或者即将要运行的任务的任务控制块。
(2):xTicksToDelay 是任务控制块的一个成员,用于记录任务需要延时的时间,单位为 SysTick 的中断周期。比如我们本书当中 SysTick 的中断周期为 10ms,调用 vTaskDelay( 2 )则完成 2*10ms 的延时。
xTicksToDelay 定义:
typedef struct tskTaskControlBlock
{volatile StackType_t *pxTopOfStack; /* 栈顶 */ListItem_t xStateListItem; /* 任务节点 */StackType_t *pxStack; /* 任务栈起始地址 *//* 任务名称,字符串形式 */char pcTaskName[ configMAX_TASK_NAME_LEN ];TickType_t xTicksToDelay; /* 用于延时 */
} tskTCB;2.2 修改 vTaskSwitchContext()函数
taskYIELD();:任务切换。调用 tashYIELD()会产生 PendSV中断,在 PendSV中断服务函数中会调用上下文切换函数 vTaskSwitchContext(),该函数的作用是寻找最高优先级的就绪任务,然后更新 pxCurrentTCB。
这里我们创建两个任务以及一个空闲任务进行在这三个任务之间进行切换。
#if 0
void vTaskSwitchContext( void )
{ /* 两个任务轮流切换 */if ( pxCurrentTCB == &Task1TCB ){pxCurrentTCB = &Task2TCB;}else{pxCurrentTCB = &Task1TCB;}
}
#elsevoid vTaskSwitchContext( void )
{ /* 如果当前任务是空闲任务,那么就去尝试执行任务 1 或者任务 2, 看看他们的延时时间是否结束,如果任务的延时时间均没有到期, 那就返回继续执行空闲任务 */ if ( pxCurrentTCB == &IdleTaskTCB ) (1) { if (Task1TCB.xTicksToDelay == 0) { pxCurrentTCB =&Task1TCB; } else if (Task2TCB.xTicksToDelay == 0) { pxCurrentTCB =&Task2TCB; } else { return; /* 任务延时均没有到期则返回,继续执行空闲任务 */ } } else /* 当前任务不是空闲任务则会执行到这里 */ (2) { /*如果当前任务是任务 1 或者任务 2 的话,检查下另外一个任务, 如果另外的任务不在延时中,就切换到该任务 否则,判断下当前任务是否应该进入延时状态, 如果是的话,就切换到空闲任务。否则就不进行任何切换 */ if (pxCurrentTCB == &Task1TCB) { if (Task2TCB.xTicksToDelay == 0) { pxCurrentTCB =&Task2TCB; } else if (pxCurrentTCB->xTicksToDelay != 0) { pxCurrentTCB = &IdleTaskTCB;} else { return; /* 返回,不进行切换,因为两个任务都处于延时中 */ } } else if (pxCurrentTCB == &Task2TCB) { if (Task1TCB.xTicksToDelay == 0) { pxCurrentTCB =&Task1TCB; } else if (pxCurrentTCB->xTicksToDelay != 0) { pxCurrentTCB = &IdleTaskTCB; } else { return; /* 返回,不进行切换,因为两个任务都处于延时中 */ } } }
}
#endif3. SysTick 中断服务函数
在任务上下文切换函数 vTaskSwitchContext ()中,会判断每个任务的任务控制块中的延时成员 xTicksToDelay 的值是否为 0,如果为 0就要将对应的任务就绪,如果不为 0 就继续延时。如果一个任务要延时,一开始 xTicksToDelay 肯定不为 0,当 xTicksToDelay 变为0 的时候表示延时结束,那么 xTicksToDelay 是以什么周期在递减?在哪里递减?在FreeRTOS 中,这个周期由 SysTick 中断提供,操作系统里面的最小的时间单位就是SysTick 的中断周期,我们称之为一个 tick。
SysTick 中断服务函数:
void xPortSysTickHandler( void )
{/* 关中断 */vPortRaiseBASEPRI(); /* 更新系统时基 */xTaskIncrementTick(); /* 开中断 */vPortClearBASEPRIFromISR();
}xTaskIncrementTick()函数:
void xTaskIncrementTick( void )
{TCB_t *pxTCB = NULL;BaseType_t i = 0;/* 更新系统时基计数器 xTickCount,xTickCount 是一个在 port.c 中定义的全局变量 */const TickType_t xConstTickCount = xTickCount + 1;xTickCount = xConstTickCount;/* 扫描就绪列表中所有任务的 xTicksToDelay,如果不为 0,则减 1 */for (i=0; i<configMAX_PRIORITIES; i++){pxTCB = ( TCB_t * ) listGET_OWNER_OF_HEAD_ENTRY( ( &pxReadyTasksLists[i] ) );if (pxTCB->xTicksToDelay > 0){pxTCB->xTicksToDelay --;}}/* 任务切换 */portYIELD();
}4. SysTick 初始化函数
SysTick 的中断服务函数要想被顺利执行,则 SysTick 必须先初始化。
vPortSetupTimerInterrupt()函数:
/* SysTick 控制寄存器 */
#define portNVIC_SYSTICK_CTRL_REG ( * ( ( volatile uint32_t * ) 0xe000e010 ) )/* SysTick 重装载寄存器寄存器 */
#define portNVIC_SYSTICK_LOAD_REG ( * ( ( volatile uint32_t * ) 0xe000e014 ) )#ifndef configSYSTICK_CLOCK_HZ#define configSYSTICK_CLOCK_HZ configCPU_CLOCK_HZ/* 确保 SysTick 的时钟与内核时钟一致 */#define portNVIC_SYSTICK_CLK_BIT ( 1UL << 2UL )
#else#define portNVIC_SYSTICK_CLK_BIT ( 0 )
#endif#define portNVIC_SYSTICK_INT_BIT ( 1UL << 1UL )
#define portNVIC_SYSTICK_ENABLE_BIT ( 1UL << 0UL )void vPortSetupTimerInterrupt( void )
{/* 设置重装载寄存器的值 */portNVIC_SYSTICK_LOAD_REG = ( configSYSTICK_CLOCK_HZ / configTICK_RATE_HZ ) - 1UL;/* 设置系统定时器的时钟等于内核时钟使能 SysTick 定时器中断使能 SysTick 定时器 */portNVIC_SYSTICK_CTRL_REG = ( portNVIC_SYSTICK_CLK_BIT | portNVIC_SYSTICK_INT_BIT |portNVIC_SYSTICK_ENABLE_BIT );
}xPortStartScheduler()函数中调用 vPortSetupTimerInterrupt():
BaseType_t xPortStartScheduler( void )
{/* 配置 PendSV 和 SysTick 的中断优先级为最低 */portNVIC_SYSPRI2_REG |= portNVIC_PENDSV_PRI;portNVIC_SYSPRI2_REG |= portNVIC_SYSTICK_PRI;/* 初始化 SysTick */vPortSetupTimerInterrupt();/* 启动第一个任务,不再返回 */prvStartFirstTask();/* 不应该运行到这里 */return 0;
}
FreeRTOS实时操作系统_时光の尘的博客-CSDN博客
相关文章:
FreeRTOS菜鸟入门(五)·空闲任务与阻塞延时的实现
目录 1. 实现空闲任务 1.1 定义空闲任务的栈 1.2 定义空闲任务的任务控制块 1.3 创建空闲任务 2. 实现阻塞延时 2.1 vTaskDelay()函数 2.2 修改 vTaskSwitchContext()函数 3. SysTick 中断服务函数 4. SysTick 初始化函数 通过之前我们了解知道,任…...

Doris部署生产集群最低要求的部署方案
Doris生产集群最低部署方案(2025年4月版) 一、节点规划与数量 1. FE节点(Frontend) 数量:至少 3个节点(1个Follower 2个 Observer),确保高可用(HA)。角色分…...

JBOSS反序列化漏洞解析与防范策略CVE-2017-12149
JBOSS反序列化漏洞解析与防范策略 引言 JBOSS是一个流行的开源应用服务器,广泛应用于企业级应用程序的开发和部署。然而,由于其广泛的使用和复杂的架构,JBOSS也成为了黑客攻击的常见目标。近年来,多个JBOSS漏洞被曝光࿰…...

MySQL MVCC工作流程详解
MySQL MVCC工作流程详解 1. 基础概念 MVCC(多版本并发控制)是通过在每行记录后面保存多个版本来实现并发控制的技术,主要用于提供并发事务访问数据库时的读一致性。 2. 核心要素 2.1 事务ID(DB_TRX_ID) 每个事务都…...

Web3技术下数字资产数据保护的实践探索
在这个信息爆炸的时代,数字资产已经成为我们生活中不可或缺的一部分。随着Web3技术的兴起,它以其去中心化、透明性和安全性的特点,为数字资产的管理和保护提供了新的解决方案。本文将探讨Web3技术在数字资产数据保护方面的实践探索࿰…...
从PPT到PNG:Python实现的高效PPT转图工具
从PPT到PNG:Python实现的高效PPT转图工具 在日常工作中,PPT(PowerPoint)文件是我们常用的演示工具。然而,有时候我们需要将PPT的内容提取为图片格式(如PNG)以便于展示或保存。手动将每一页PPT保…...

使用 Java 8 Stream实现List重复数据判断
import java.util.*; import java.util.stream.Collectors;public class DeduplicateStreamExample {static class ArchiveItem {// 字段定义与Getter/Setter省略(需根据实际补充)private String mATNR;private String lIFNR;private String suppSpecMod…...
)
状态模式详解与真实场景案例(Java实现)
模式定义 状态模式(State Pattern) 允许对象在其内部状态改变时改变它的行为,使对象看起来像是修改了它的类。属于行为型设计模式,核心思想是将状态抽象为独立对象,不同状态下行为封装在不同状态类中。 解决的问题 …...

BitMap和RoaringBitmap:极致高效的大数据结构
目录 1、引言 2、BitMap:基础 2.1、核心原理 2.2、BitMap的优势 2.3、BitMap的局限性 3、RoaringBitmap:进化 3.1、分段策略 3.2、三种容器类型 3.2.1. ArrayContainer(数组容器) 3.2.2. BitMapContainer(位图容器) 3.2.3. RunContainer(行程容器) 3.3、行…...

【Java基础】Java集合遍历方式
前言 在Java编程中,集合(Collection)是存储和操作对象的核心工具。遍历集合是开发者最频繁的操作之一,但不同场景下选择合适的遍历方式至关重要。 一、基础遍历方式 1. 基本for循环 适用场景:仅适用于List等有序集…...

Rust-引用借用规则
目录 一、概述 二、借用规则 三、详细解释 3.1 第一条规则 3.2 第二条规则 3.3 第三条规则 四、总结 Welcome to Code Blocks blog 本篇文章主要介绍了 [Rust-引用借用规则] ❤博主广交技术好友,喜欢文章的可以关注一下❤ 一、概述 Rust为确保程序在运行时不…...

如何保障企业数据的安全?软件开发中的数据安全防护措施
引言 随着数字化转型的推进,数据已经成为企业最重要的资产之一。然而,随着数据量的增长,数据泄露、丢失和滥用的风险也不断增加。如何保障企业数据的安全,成为企业在进行软件开发时必须重点关注的问题。本文将介绍软件开发中的一些…...
Linux安装开源版MQTT Broker——EMQX服务器环境从零到一的详细搭建教程
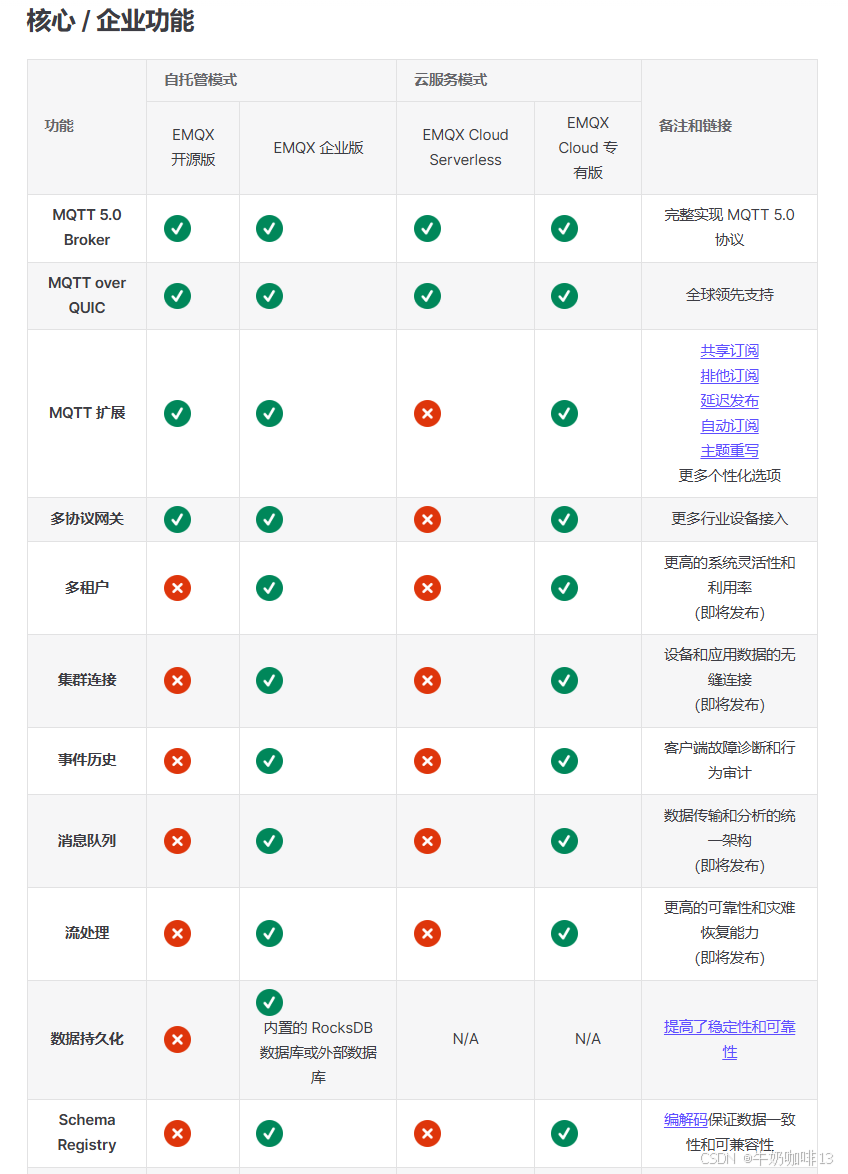
零、EMQX各个版本的区别 EMQX各个版本的功能对比详情https://docs.emqx.com/zh/emqx/latest/getting-started/feature-comparison.html...

【软件工程大系】净室软件工程
净室软件工程(Cleanroom Software Engineering)是一种以缺陷预防(正确性验证)为核心的软件开发方法,旨在通过严格的工程规范和数学验证,在开发过程中避免缺陷的产生,而非依赖后期的测试和调试。…...
软考 系统架构设计师系列知识点之杂项集萃(49)
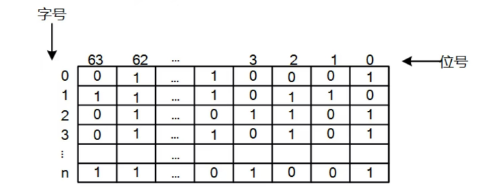
接前一篇文章:软考 系统架构设计师系列知识点之杂项集萃(48) 第76题 某文件管理系统在磁盘上建立了位视图(bitmap),记录磁盘的使用情况。若磁盘上物理块的编号依次为:0、1、2、……;…...
--网络编程)
Day(21)--网络编程
网络编程 在网络通信协议下,不同计算机上运行的程序,进行的数据传输 应用场景:即使通信、网友对战、金融证券等等,不管是什么场景,都是计算机和计算机之间通过网络进行的数据传输 java.net 常见的软件架构 C/S&am…...
JVM 调优不再难:AI 工具自动生成内存优化方案
在 Java 应用程序的开发与运行过程中,Java 虚拟机(JVM)的性能调优一直是一项极具挑战性的任务,尤其是内存优化方面。不合适的 JVM 内存配置可能会导致应用程序出现性能瓶颈,甚至频繁抛出内存溢出异常,影响业…...

封装Tcp Socket
封装Tcp Socket 0. 前言1. Socket.hpp2. 简单的使用介绍 0. 前言 本文中用到的Log.hpp在笔者的历史文章中都有涉及,这里就不再粘贴源码了,学习地址如下:https://blog.csdn.net/weixin_73870552/article/details/145434855?spm1001.2014.3001…...

5.1 GitHub订阅监控系统实战:FastAPI+SQLAlchemy高效架构设计与核心源码揭秘
GitHub Sentinel Agent 分析报告功能设计与实现 关键词:订阅管理 API 设计、GitHub API 集成、SQLAlchemy ORM、JWT 认证、单元测试框架 1. 订阅管理功能架构设计 订阅管理模块采用分层架构设计,通过 FastAPI 构建 RESTful 接口,结合 SQLAlchemy ORM 实现数据持久化: #me…...

2025年推荐使用的开源大语言模型top20:核心特性、选择指标和开源优势
李升伟 编译 随着人工智能技术的持续发展,开源大型语言模型(LLMs)正变得愈发强大,使最先进的AI能力得以普及。到2025年,开源生态系统中涌现出多个关键模型,它们在各类应用场景中展现出独特优势。 大型语言…...
Linux 入门九:Linux 进程间通信
概述 进程间通信(IPC,Inter-Process Communication)是指在不同进程之间传递数据和信息的机制。Linux 提供了多种 IPC 方式,包括管道、信号、信号量、消息队列、共享内存和套接字等。 方式 一、管道(Pipe)…...

Spark-SQL核心编程实战:自定义函数与聚合函数详解
在大数据处理领域,Spark-SQL是极为重要的工具。今天和大家分享一下在Spark-SQL开发中的自定义函数和聚合函数的使用,这些都是基于实际项目开发经验的总结。 在Spark-SQL开发时,第一步是搭建开发环境。在IDEA中创建Spark-SQL子模块,…...

[Mysql][Mybatis][Spring]配置文件未能正确给驱动赋值,.properties文件username值被替换
这是最初的.properties配置文件: drivercom.mysql.cj.jdbc.Driver urljdbc:mysql://localhost:3306/qykf usernameroot password123456 在Mybatis中引入后进行赋值: <environments default"development"><environment id"deve…...

go 指针接收者和值接收者的区别
go 指针接收者和值接收者的区别 指针接收者和值接收者的区别主要有两点: Go 中函数传参是传值,因此指针接收者传递的是接收者的指针拷贝,值接收者传递的是接收者的拷贝---在方法中指针接收者的变量会被修改,而值接收者的成员变量…...

Redis之缓存更新策略
缓存更新策略 文章目录 缓存更新策略一、策略对比二、常见的缓存更新策略三、如何选择策略四、实际应用示例五、使用 Cache-Aside TTL 的方式,实现缓存商铺信息详情1.引入StringRedisTemplate2.将查询商铺信息加入缓存3.更新商铺信息时移除缓存总结 六、注意事项 一…...
【leetcode100】杨辉三角
1、题目描述 给定一个非负整数 numRows,生成「杨辉三角」的前 numRows 行。 在「杨辉三角」中,每个数是它左上方和右上方的数的和。 示例 1: 输入: numRows 5 输出: [[1],[1,1],[1,2,1],[1,3,3,1],[1,4,6,4,1]]示例 2: 输入: numRows 1 输出: [[1]…...

git reset详解
一、git reset 的核心作用 用于 移动当前分支的 HEAD 指针 到指定的提交,并可选择是否修改工作区和暂存区。 ⚠️ 注意:若提交已被推送到远程仓库,强制重置(--hard)后需谨慎操作,避免影响协作。 二、三种模…...
Selenium2+Python自动化:利用JS解决click失效问题
文章目录 前言一、遇到的问题二、点击父元素问题分析解决办法实现思路 三、使用JS直接点击四、参考代码 前言 在使用Selenium2和Python进行自动化测试时,我们有时会遇到这样的情况:元素明明已经被成功定位,代码运行也没有报错,但…...

OpenStack Yoga版安装笔记(十九)启动一个实例(Self-service networks)
1、概述 1.1 官方文档 Launch an instancehttps://docs.openstack.org/install-guide/launch-instance.html 《OpenStack Yoga版安装笔记(十四)启动一个实例》文档中,已经按照Option1: Provider networks创建网络。 本文按照Option2&#…...
栈与队列)
数据结构(java)栈与队列
栈:(先进后出) 入栈: 1.普通栈一定要放、最小栈放的原则是: *如果最小栈是空的,那么放 *如果最小栈的栈顶元素没有当前的元素小,则放 2.如果要放的的元素小于等于最小栈栈顶元素可以放吗?放 出栈: 需要…...