具身智能机器人学习路线全解析
一、引言
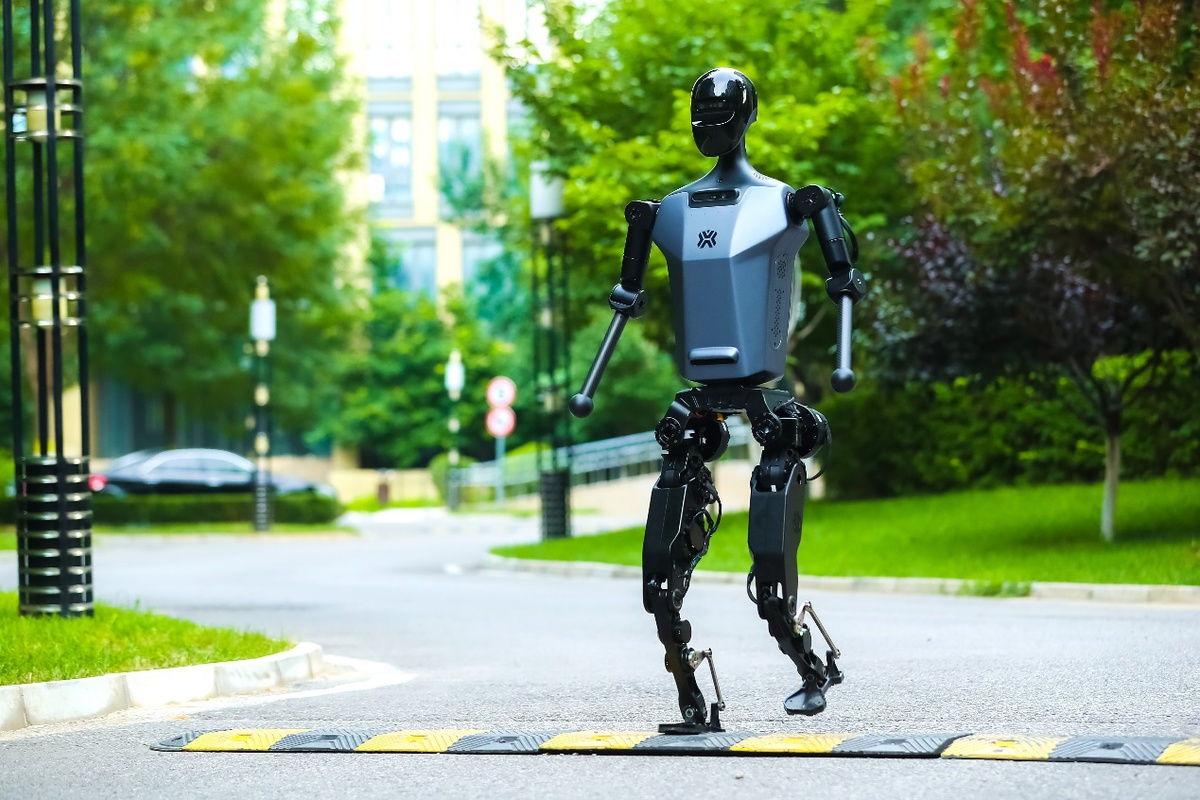
具身智能机器人作为融合了机器人学、人工智能、认知科学等多领域知识的前沿技术,正逐渐改变着我们的生活和工作方式。从工业制造到家庭服务,从医疗护理到太空探索,具身智能机器人都展现出了巨大的潜力。对于想要深入了解和学习这一领域的人来说,构建一个系统的学习路线至关重要。

二、基础理论学习
(一)数学基础
- 线性代数:理解向量、矩阵运算,用于机器人运动学和动力学建模。例如,通过齐次变换矩阵描述机器人关节的位置和姿态变化。
- 微积分:掌握导数、积分概念,在机器人控制中用于计算速度、加速度等物理量,优化机器人的运动轨迹。
- 概率论与数理统计:处理机器人感知中的不确定性,如传感器噪声,通过概率模型进行状态估计和决策。
(二)物理基础
- 力学:包括牛顿力学、刚体力学,了解机器人在运动过程中的受力分析,为设计机器人的结构和控制算法提供依据。
- 运动学:研究机器人关节的运动关系,确定机器人末端执行器的位置和姿态,是机器人编程的基础。
- 动力学:探讨机器人运动与力之间的关系,分析机器人在不同负载和运动状态下的动力需求。
(三)编程基础
- Python:作为具身智能机器人领域广泛使用的编程语言,具备丰富的库和工具,如 NumPy 用于数值计算,SciPy 用于科学计算,Matplotlib 用于数据可视化。
- C++:在对实时性要求较高的机器人系统中,C++ 常被用于底层开发,提高系统的运行效率。
三、机器人学知识
(一)机器人结构与设计
- 机械结构:学习机器人的机械本体,如关节、连杆的设计原理,了解不同类型机器人(如串联机器人、并联机器人)的结构特点。
- 驱动系统:熟悉电机、舵机等驱动装置的工作原理和控制方法,掌握如何根据机器人的负载和运动要求选择合适的驱动设备。
- 传感器技术:了解各类传感器,如摄像头、激光雷达、力传感器、陀螺仪等在机器人感知中的应用,掌握传感器数据的采集和处理方法。
(二)机器人运动控制
- 运动规划:学习路径规划算法,如 A * 算法、Dijkstra 算法,用于为机器人规划从起始点到目标点的无碰撞路径。
- 轨迹控制:掌握机器人关节空间和笛卡尔空间的轨迹生成方法,实现机器人的平滑运动。
- 反馈控制:基于传感器反馈,采用 PID 控制、自适应控制等算法,调整机器人的运动参数,确保机器人准确跟踪目标轨迹。
四、人工智能技术
(一)机器学习
- 监督学习:学习分类和回归算法,如决策树、支持向量机、神经网络,用于机器人的模式识别和状态预测。
- 无监督学习:了解聚类、降维等算法,帮助机器人对大量的感知数据进行分析和理解。
- 强化学习:通过与环境进行交互,根据奖励信号学习最优策略,使机器人能够在复杂环境中自主决策和学习。
(二)计算机视觉
- 图像基础:掌握图像的基本处理方法,如滤波、边缘检测、特征提取,为机器人的视觉感知提供基础。
- 目标检测与识别:学习基于深度学习的目标检测算法,如 YOLO、Faster R-CNN,实现机器人对环境中物体的识别和定位。
- 视觉 SLAM:同时定位与地图构建,使机器人能够根据视觉信息创建环境地图,并在地图中实时定位自身位置。
五、案例分析
(一)波士顿动力公司的 Atlas 机器人
- 特点:具备高度的动态平衡能力和复杂的运动技能,能够在各种地形上行走、奔跑、跳跃,还能完成开门、搬运物体等任务。
- 技术实现:结合了先进的机器人运动控制算法、高精度的传感器和强大的计算能力,通过强化学习不断优化自身的运动策略。
(二)谷歌的 AI 机器人
- 特点:能够通过视觉和触觉感知与环境进行交互,自主学习完成各种复杂的操作任务,如在杂乱的环境中抓取不同形状的物体。
- 技术实现:利用深度学习算法对大量的视觉和触觉数据进行训练,实现机器人对物体形状、位置和物理特性的理解,从而实现精准的操作。

六、代码示例
(一)使用 Python 和 OpenCV 进行简单的图像识别
import cv2
import numpy as np# 加载预训练的Haar级联分类器
face_cascade = cv2.CascadeClassifier(cv2.data.haarcascades + 'haarcascade_frontalface_default.xml')# 读取图像
img = cv2.imread('test.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# 检测人脸
faces = face_cascade.detectMultiScale(gray, scaleFactor=1.1, minNeighbors=5, minSize=(30, 30))# 在图像上绘制矩形框标记人脸
for (x, y, w, h) in faces:cv2.rectangle(img, (x, y), (x + w, y + h), (0, 255, 0), 2)# 显示结果图像
cv2.imshow('Face Detection', img)
cv2.waitKey(0)
cv2.destroyAllWindows()(二)使用 Python 和 PyTorch 实现简单的神经网络进行手写数字识别
import torch
import torch.nn as nn
import torch.optim as optim
from torchvision import datasets, transforms# 数据预处理
transform = transforms.Compose([transforms.ToTensor(), transforms.Normalize((0.5,), (0.5,))])# 加载训练集和测试集
train_dataset = datasets.MNIST(root='./data', train=True, download=True, transform=transform)
test_dataset = datasets.MNIST(root='./data', train=False, download=True, transform=transform)train_loader = torch.utils.data.DataLoader(train_dataset, batch_size=64, shuffle=True)
test_loader = torch.utils.data.DataLoader(test_dataset, batch_size=64, shuffle=False)# 定义神经网络模型
class Net(nn.Module):def __init__(self):super(Net, self).__init__()self.fc1 = nn.Linear(28 * 28, 128)self.fc2 = nn.Linear(128, 64)self.fc3 = nn.Linear(64, 10)def forward(self, x):x = x.view(-1, 28 * 28)x = torch.relu(self.fc1(x))x = torch.relu(self.fc2(x))x = self.fc3(x)return x# 初始化模型、损失函数和优化器
model = Net()
criterion = nn.CrossEntropyLoss()
optimizer = optim.SGD(model.parameters(), lr=0.01, momentum=0.9)# 训练模型
for epoch in range(10):running_loss = 0.0for i, data in enumerate(train_loader, 0):inputs, labels = dataoptimizer.zero_grad()outputs = model(inputs)loss = criterion(outputs, labels)loss.backward()optimizer.step()running_loss += loss.item()if i % 100 == 99:print(f'Epoch {epoch + 1}, Step {i + 1}, Loss: {running_loss / 100:.3f}')running_loss = 0.0# 测试模型
correct = 0
total = 0
with torch.no_grad():for data in test_loader:images, labels = dataoutputs = model(images)_, predicted = torch.max(outputs.data, 1)total += labels.size(0)correct += (predicted == labels).sum().item()print(f'Accuracy of the network on the 10000 test images: {100 * correct / total}%')七、总结
具身智能机器人的学习是一个长期而复杂的过程,需要不断积累理论知识和实践经验。通过系统地学习数学、物理、编程、机器人学和人工智能等多方面的知识,结合实际案例和代码实践,相信你能够逐步掌握具身智能机器人的核心技术,为这一领域的发展贡献自己的力量。
相关文章:
具身智能机器人学习路线全解析
一、引言 具身智能机器人作为融合了机器人学、人工智能、认知科学等多领域知识的前沿技术,正逐渐改变着我们的生活和工作方式。从工业制造到家庭服务,从医疗护理到太空探索,具身智能机器人都展现出了巨大的潜力。对于想要深入了解和学习这一…...

虚幻基础:ue引擎的碰撞
文章目录 碰撞:碰撞体间 运动后 产生碰撞的行为——由引擎负责,并向各自发送事件忽略重叠阻挡 碰撞体类型模式纯查询:不清楚具体作用可以阻挡 actor碰撞(武器:刀/子弹)子组件可以产生阻挡 角色的碰撞只有根组件可以阻挡࿰…...
写项目时一些疑惑:组件间的通信、createDownloadUrl和DownloadUrl,ArrayBuffer与Blob等
目录 一、[vite] Internal server error: No known conditions for "./lib/locale/lang/zh-cn" specifier in "element-plus" package 二、可以用vue和JS的代码片段,但是用不了html的代码片段 三、meta是什么东西 四、为什么代码保持一致,但是时间轴始…...

TAS启动与卸载
3. 启动TAS(Thin-Agent服务) TAS在安装完成后通常会自动启动,并在系统重启时自启。如需手动启动,请按以下步骤操作:  3.1 在Windows上启动TAS 1. 打开 Windows服务管理器: ◦ 按下 Win R&…...

对抗生成进化:基于DNA算法的AIGC检测绕过——让AI创作真正“隐形“
一、技术背景与核心思想 2025年,AIGC检测工具(如Originality.AI 5.0)的识别准确率已达99.3%。本研究提出基于染色体编码的对抗进化框架(CAEF),通过模拟生物进化过程动态优化生成模型,成功将检测…...
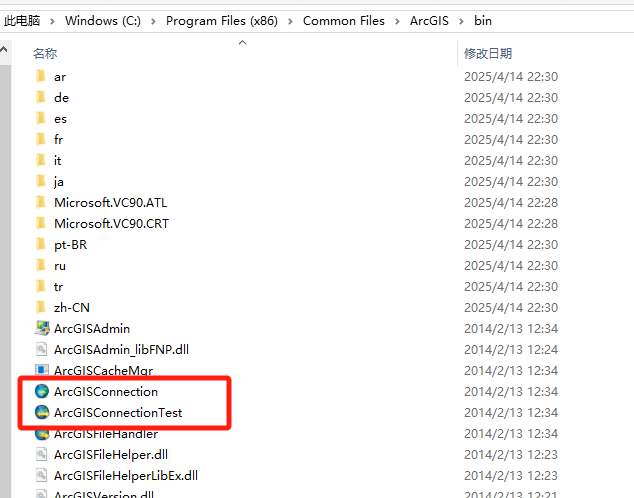
手动关闭ArcGIS与ArcGIS Online连接的方法
【关闭软件启动时ArcGIS与ArcGIS Online连接方法】 打开C盘找到文件夹“C:\Program Files (x86)\Common Files\ArcGIS\bin”,如下图,删除“ArcGISConnection.exe”与“ArcGISConnectionTest.exe”文件,软件下次启动的时候就不会建立与ArcGIS …...

SpringBoot条件注解全解析:核心作用与使用场景详解
目录 引言一、条件注解的核心机制二、SpringBoot内置条件注解详解1、ConditionalOnClass和ConditionalOnMissingClass2、ConditionalOnBean和ConditionalOnMissingBean3、ConditionalOnProperty4、ConditionalOnWebApplication和ConditionalOnNotWebApplication5、ConditionalO…...

android11通过白名单卸载安装应用
目录 1.源码路径: 2.准备文件package.conf: 3.安装方法installPackagesLI 4.卸载方法deletePackageX 1.源码路径: frameworks/base/services/core/java/com/android/server/pm/PackageManagerService.java public static final String WHITELIST_PATH="/data/misc/pa…...
大M法处理非线性约束线性化
在电力系统优化问题中,大M法(Big M Method)是一种经典的处理非线性约束线性化的技术,尤其适用于混合整数线性规划(MILP)问题。 其核心思想是通过引入足够大的常数M和辅助变量(如二元变量或松弛…...
【网络安全】谁入侵了我的调制解调器?(一)
文章目录 我被黑了159.65.76.209,你是谁?黑客攻击黑客?交出证据三年后我被黑了 两年前,在我家里使用家庭网络远程办公时,遇到了一件非常诡异的事情。当时,我正在利用一个“盲 XXE 漏洞”,这个漏洞需要借助一个外部 HTTP 服务器来“走私”文件。为了实现这一点,我在 AW…...

【Nokia 7360 ISAM局端】7360局端升级步骤
引言 Nokia 7360 ISAM局端是当前主流的OLT局端之一,在测试ONT产品中经常需要对接7360局端,特别是欧美等海外运营商。测试过程中经常需要升级OLT版本,以便对齐前方客户的现网环境。本文介绍将Nokia 7360 ISAM局端升级到L6GPAA65.669版本的详细步骤。 连接带外管理口 将维护…...

await 在多线程,子线程中的使用
await 在多线程,子线程中的使用 await self.send_reply(user, user, user, auto_content, reply) 这行代码是在一个异步函数里调用类的实例方法 send_reply 代码含义 1. await 关键字 在 Python 的异步编程里,await 关键字的作用是暂停当前异步函数的执行,直到 await 后…...

主数据管理:企业数字化转型的 “数据基石“ 如何为 AI 筑基?
引言:当数据成为新石油,谁在炼制 "高纯度燃料"? 在数字化转型的浪潮中,企业宛如行驶在数据海洋中的巨轮,AI 则是驱动巨轮破浪前行的引擎。但引擎能否高效运转,取决于燃料的纯度 —— 这正是主数…...

使用源码编译安装golang的docker版
编译规则 1.4之前用C写的,1.4可编译后续一直到1.9版本,后续版本实现了自举,后续版本是go写的,基本上相互低2个版本能编译出新版本。 Go < 1.4:C 工具链。 1.5 < Go < 1.19:Go 1.4 编译器。 1.20…...
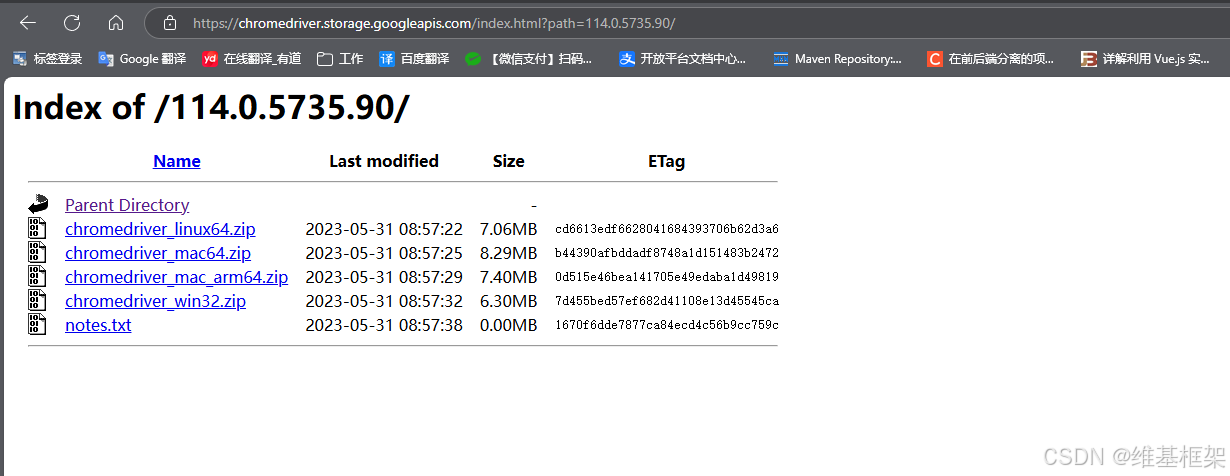
使用 chromedriver 实现网络爬虫【手抄】
1、引用 selenium 包 <dependency><groupId>org.seleniumhq.selenium</groupId><artifactId>selenium-java</artifactId><version>4.29.0</version> </dependency> <dependency><groupId>org.seleniumhq.seleniu…...
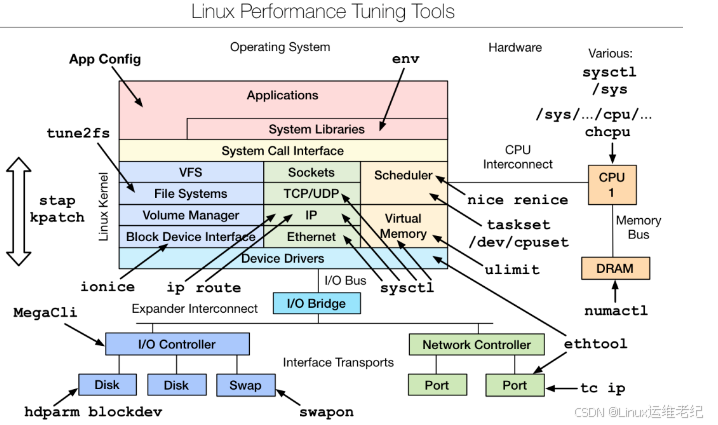
Linux之 grep、find、ls、wc 命令
Linux之 grep、find、ls、wc 命令 “ 在 Linux 世界中,命令行是不可或缺的一部分,而掌握一些常用的命令可以帮助你更有效率地管理文件和系统。本文将为你介绍四個基礎而强大的 Linux 命令:grep、find、ls 和 wc,带你开启高效文件…...

AI 模型高效化:推理加速与训练优化的技术原理与理论解析
AI 模型高效化:推理加速与训练优化的技术原理与理论解析 文章目录 AI 模型高效化:推理加速与训练优化的技术原理与理论解析一、推理加速:让模型跑得更快的“程序员魔法”(一)动态结构自适应推理:像人类一样…...

c++STL——vector的使用和模拟实现
文章目录 vector的使用和模拟实现vector的使用vector介绍重点接口的讲解迭代器部分默认成员函数空间操作增删查改操作迭代器失效问题(重要)调整迭代器 vector的模拟实现实现的版本模拟实现结构预先处理的函数尾插函数push_backswap函数赋值重载size函数reserve函数 迭代器默认成…...
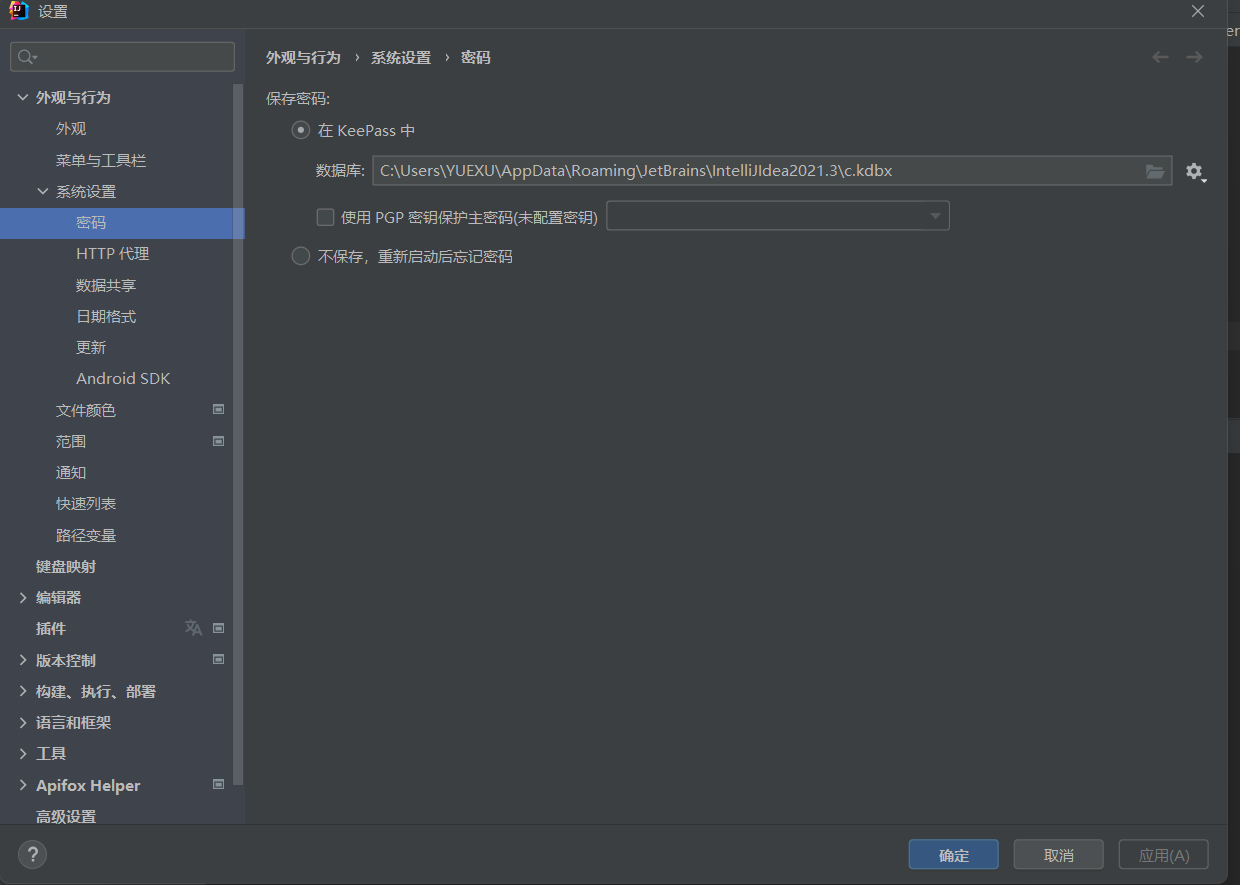
git更新的bug
文章目录 1. 问题2. 分析 1. 问题 拉取了一个项目后遇到了这个问题, nvocation failed Server returned invalid Response. java.lang.RuntimeException: Invocation failed Server returned invalid Response. at git4idea.GitAppUtil.sendXmlRequest(GitAppUtil…...
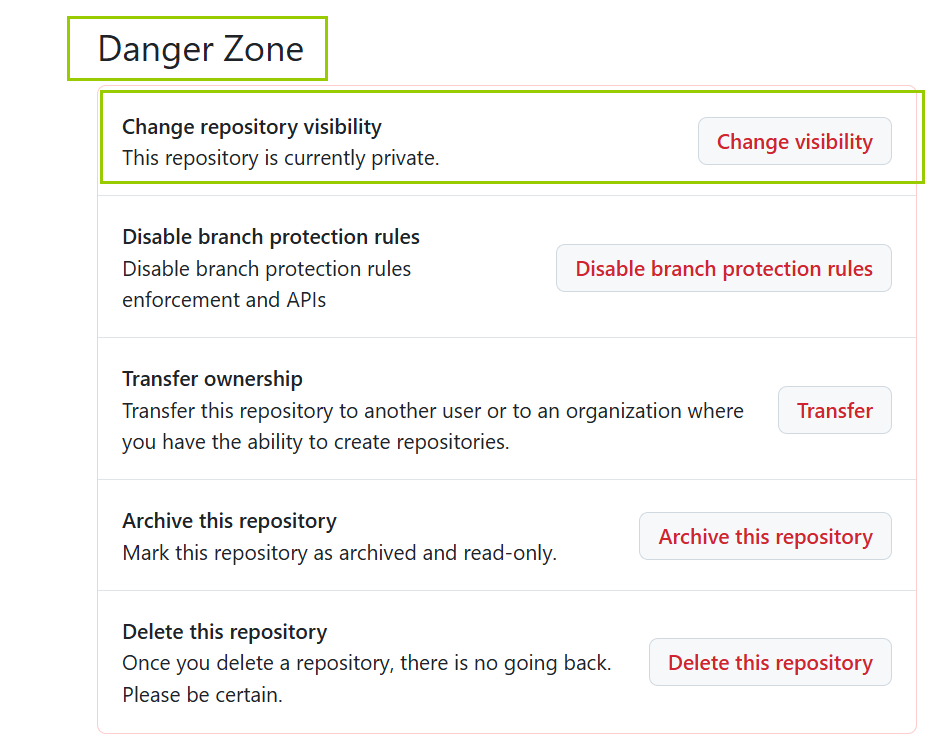
github | 仓库权限管理 | 开权限
省流版总结: github 给别人开权限:仓库 -> Setting -> Cllaborate -> Add people GitHub中 将公开仓库改为私有:仓库 -> Setting -> Danger Zone(危险区) ->Change repository visibility( 更改仓…...

MQTT客户端核心架构解析:clients.h源码深度解读
MQTT客户端核心架构解析:clients.h源码深度解读 一、头文件概览与设计哲学 clients.h作为MQTT客户端核心数据结构定义文件,体现了以下设计原则: 分层架构:网络层/协议层/业务层解耦状态管理:通过状态机实现复杂协议…...

uniapp自定义底部导航栏,解决下拉时候顶部空白的问题
一、背景 最近使用uniapp开发微信小程序,因为使用了自定义的顶部导航栏,所以在ios平台上(Android未测试)测试的时候,下拉的时候会出现整个页面下拉并且顶部留下大片空白的问题 二、任务:解决这个问题 经…...
C++学习之密码学知识
目录 1.文档介绍 2.知识点概述 3.项目准备 4.序列化介绍 5.项目中基础组件介绍 6.基础模块在项目中作用 7.项目中其他模块介绍 8.加密三要素 9.对称加密和非堆成加密 10.对称和非对称加密特点 11.堆成加密算法des 12.des对称加密算法 13.对称加密算法aes 14.知识点…...
力扣 797. 所有可能的路径
题目 给你一个有 n 个节点的 有向无环图(DAG),请你找出所有从节点 0 到节点 n-1 的路径并输出(不要求按特定顺序) graph[i] 是一个从节点 i 可以访问的所有节点的列表(即从节点 i 到节点 graph[i][j]存在一…...
第二篇:linux之Xshell使用及相关linux操作
第二篇:linux之Xshell使用及相关linux操作 文章目录 第二篇:linux之Xshell使用及相关linux操作一、Xshell使用1、Xshell安装2、Xshell使用 二、Bash Shell介绍与使用1、什么是Bash Shell(壳)?2、Bash Shell能干什么?3、平时如何使…...
自动驾驶热点技术的成熟之处就是能判断道路修复修路,能自动利用类似“人眼”的摄像头进行驾驶!值得学习!)
全自动驾驶(FSD,Full Self-Driving)自动驾驶热点技术的成熟之处就是能判断道路修复修路,能自动利用类似“人眼”的摄像头进行驾驶!值得学习!
全自动驾驶(FSD,Full Self-Driving)软件是自动驾驶领域中的热点技术,其核心目标是实现车辆在各种复杂交通环境下的安全、稳定、高效自动驾驶。FSD软件的技术核心涉及多个方面的交叉技术,下面将详细分析说明其主要核心技…...

SpringBoot项目动态加载jar 实战级别
网上也找到类似的文章,但是基本都不到实用级别,就是不能直接用。在参照网上的文章及与AI沟通N次后终于完善可以在实际项目上 创建jar文件动态加载类 Component Slf4j public class PluginRegistry {Autowiredprivate GenericApplicationContext applicat…...
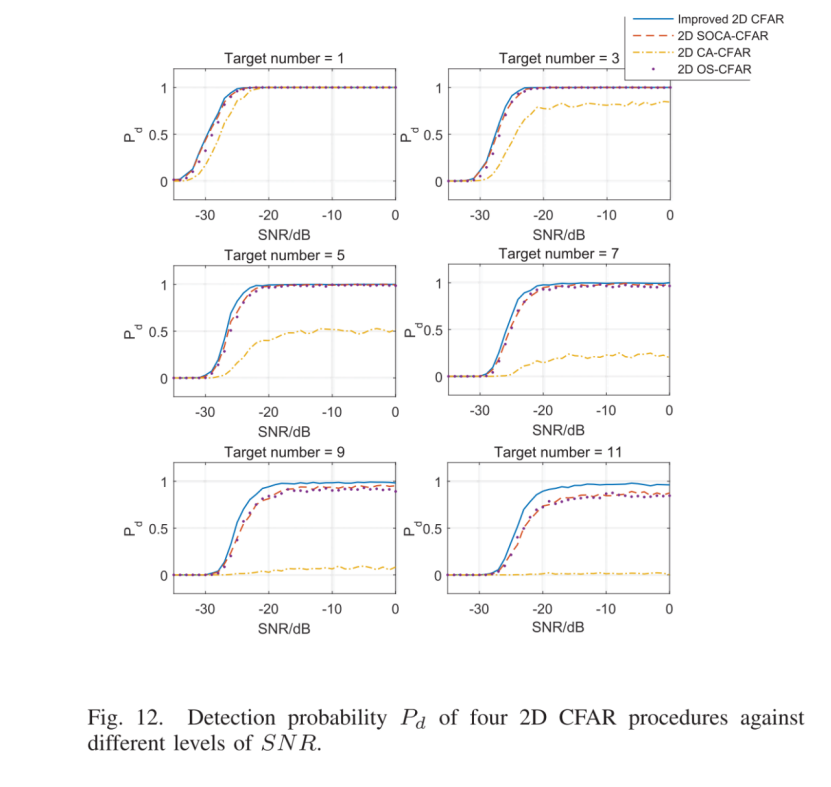
一种改进的CFAR算法用于目标检测(解决多目标掩蔽)
摘要 恒虚警率(CFAR)技术在雷达自动检测过程中起着关键作用。单元平均(CA)CFAR算法在几乎所有的多目标情况下都会受到掩蔽效应的影响。最小单元平均(SOCA)CFAR算法仅当干扰目标位于参考窗口的前后方时才具有…...

无人机+智能监控:石油管道巡检迈入“空中智慧时代”
引言:安全与效率的双重革命 在广袤的沙漠、崎岖的山脉或人迹罕至的冻土带,石油管道的安全巡检曾是一项耗时耗力且风险极高的任务。如今,随着无人机巡检技术与视频监控管理平台的深度融合,石油行业正迎来一场智能化变革——从“人巡…...
)
Python内置函数---anext()
用于异步迭代器的核心工具,专为处理异步数据流设计。 1. 基本语法 await anext(async_iterator, default) 参数: async_iterator :实现了异步迭代协议的对象(如异步生成器、异步迭代器类)。 default (可选…...