MATLAB脚本实现了一个转子系统的参数扫描和分岔分析
% 参数扫描范围
clc;
clear;
close all;S_values = 500:200:20000; % 转速范围% 定义系统参数
N = 5; % 质量点数量
num_nodes = N; % 节点数
num_dofs_per_node = 4; % 每个节点的自由度数
num_elements = num_nodes-1; % 单元数
total_dofs = num_nodes * num_dofs_per_node; % 总自由度数% 示例参数
m = [2.3182 2.5249 3.0181 4.9458 15.6646]*1; % 质量 (kg)Jd = [5.5671e-4 1.3564e-4 1.1411e-3 6.3456e-4 4.8254e-2]*1; % 转动惯量 (kg*m^2)
Jp = [2.7835e-4 6.7821e-5 5.7059e-4 3.1728e-4 2.4127e-2]*1; % 极转动惯量 (kg*m^2)e = [50 50]*1e-6; % 偏心距 (m) 5
% S=10000;% r/min% phi = [0, pi/4, pi/2, 3*pi/4, pi]; % 相位角 (rad)
l = [0.246 0.1045 0.118 0.1795]*1; % 长度 (m)
nu = [0.3, 0.3, 0.3, 0.3, 0.3]; % 泊松比% f=S/60;
% omega=2*pi*f;
vi=0.3;
% 定义材料和截面属性(示例值)
% E = 2e11; % 弹性模量
% R0=40e-3;
% I=pi*R0^4/4; %直径惯量
% rho = 7860; % 材料密度
% 质量矩阵、陀螺矩阵、刚度矩阵
% -------------质量矩阵
z0=zeros(total_dofs/2, total_dofs/2);
mj=[];
J1=[];
for i=1:Nmj=[mj, m(i) Jd(i)];J1=[J1,0,Jp(i)];% 惯性矩阵
end
Mx = diag(mj);
My = Mx;
M=[Mx z0;z0 My];
M_global=M;
% 陀螺矩阵
J2=diag(J1);% ---转子刚度矩阵----------
% 参数初始化
K =z0; % 初始化刚度矩阵% 计算b参数
b1 = zeros(N-1, 1);
b2 = zeros(N-1, 1);
b3 = zeros(N-1, 1);EI=[2.4627e5 4.5537e5 5.1703e5 1.3473e7];
EA=[1.2070e9 1.9007e9 2.0866e9 1.584e10];for i = 1:N-1b1(i) = 12 * EI(i) / (l(i)^3);b2(i) = 0.5 * l(i) * b1(i);b3(i) = 1/6 * l(i)^2 * b1(i);
end% 填充刚度矩阵
for i = 1:Nif i == 1K(1, 1) = b1(1);K(1, 2) = b2(1);K(1, 3) = -b1(1);K(1, 4) = b2(1);K(2, 2) = l(1)*b2(1)-b3(1);K(2, 3) = -b2(1);K(2, 4) = b3(1);elseif i<=N-1K(2*i-1, 2*i-1) = b1(i-1) + b1(i);K(2*i-1, 2*i) = -b2(i-1) + b2(i);K(2*i-1, 2*i+1) = -b1(i);K(2*i-1, 2*i+2) = b2(i);K(2*i, 2*i) = sum(l(i-1:i)*b2(i-1:i)) - sum(b3(i-1:i));K(2*i, 2*i+1) = -b2(i);K(2*i, 2*i+2) = b3(i);elseK(2*i-1, 2*i-1) = b1(i-1);K(2*i-1, 2*i) = b2(i-1);K(2*i, 2*i) = l(i-1)*b2(i-1)-b3(i-1);end
end% 对称填充
K= K + K';% 转子总刚度矩阵
Kr=[K z0;z0 K];% 系统总刚度矩阵K_global=Kr;% 计算阻尼矩阵(假设为比例阻尼)
aa=298;
bb=3.3482e-6;S = S_values(1);
f = S / 60;
omega = 2 * pi * f;
T=60/S;
dt = T/256; % 时间步长 1e-5
t0 = 0:dt:200*T; % 时间向量
% 初始化位移、速度、加速度向量
u = zeros(total_dofs, length(t0))+1e-6;
v = zeros(total_dofs, length(t0))+1e-6;
a = zeros(total_dofs, length(t0))+1e-6;
F = zeros(total_dofs, length(t0))+1e-6;
Fe=F;% %Newmark-β方法参数
beta=0.25; % β
delta=0.5; % δ
a0=1/(beta*dt^2); % 1/(βΔt^2)
a1=delta/(beta*dt); % δ/(βΔt)
a2=1/(beta*dt); % 1/(βΔt)
a3=1/(2*beta)-1; % 1/(2β)-1
a4=delta/beta-1; % δ/β-1
a5=dt/2*(delta/beta-2); % Δt/2*(δ/β-2)
a6=dt*(1-delta); % Δt(1-δ)
a7=dt*delta; % Δtδbifurcation_data1 = [];bifurcation_data3 = [];bifurcation_data5 = [];
bifurcation_data7 = [];bifurcation_data9 = [];bifurcation_data = cell(5,1);
poincare_data = cell(5,1); % 新增初始化
for k = 1:5bifurcation_data{k} = [];poincare_data{k} = []; % 每个质量点单独存储庞加莱数据
end
bifurcation_data0 = cell(5,1);% 对每个转速值进行模拟
tic
for idx = 1:length(S_values)S = S_values(idx);f = S / 60;omega = 2 * pi * f;T=60/S;dt = T/256; % 时间步长 1e-5
t0 = 0:dt:200*T; % 时间向量% 动力学计算%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 定义时间参数t_transient = 20*T;steady_index = find(t0 >= t_transient, 1);G=omega*[z0 J2;-J2' z0;];C_global = aa* M_global+bb*K_global-G;% %偏心% %pianxin=[9,19];me=20;% pian=[20 20.0]*1e-6;fai1=0;fai2=0;fai3=0;%开始计算num=0;% bearing=[1,9,7,15];% bearing=[3,7,13,17];bearing=[3,4,7,8,13,14,17,18];% zhongli=[9,11,13,15];zhongli=2*N+1:2:4*N-1;Nb=15;Kb=13.34e9;R=63.9e-3;r=40.1e-3;c=0*1e-6;%轴承参数g=10;anglea=0:2*pi/Nb:(2*pi-2*pi/Nb);%参数准备anglea=anglea';xishu=[65/(120+65) 75/(130+75)];% xishu=r/(R+r);jilu=zeros(length(m),length(t0));jilu_KL=[];al=[];Fb1=zeros(length(bearing),length(t0));% 将最后的结果作为下一次积分的初值u(:,1) = u(:,end);v(:,1) = v(:,end);a(:,1) = a(:,end);F = zeros(total_dofs, length(t0))+1e-10;Fe=F;% 迭代计算for i = 2:length(t0)t=(i-1)*dt;% % 保持架的转速omega_cage = omega * xishu(1);% [Fx1,Fy1,Fz1,Mx1,My1]=zhouchengli(Nb,omega_cage,t);[Fx1,Fy1,Fz1,Mx1,My1]=zhouchengli2(u(3,i-1),u(13,i-1),0,u(14,i-1),u(4,i-1),Nb,omega_cage,t);% % 保持架的转速omega_cage = omega * xishu(2);% [Fx2,Fy2,Fz2,Mx2,My2]=zhouchengli(Nb,omega_cage,t);[Fx2,Fy2,Fz2,Mx2,My2]=zhouchengli2(u(7,i-1),u(17,i-1),0,u(18,i-1),u(8,i-1),Nb,omega_cage,t);Fb1(:,i-1)=[Fx1;Mx1;Fx2;Mx2;Fy1;My1;Fy2;My2];% 轴承力F(bearing,i-1)=F(bearing,i-1)-2*[Fx1,Mx1,Fx2,Mx2,Fy1,My1,Fy2,My2]';% 重力F(zhongli,i-1)=F(zhongli,i-1)-m(1:N)'*g;% 偏心力F(pianxin,i-1)=F(pianxin,i-1)+[me*e(1)*omega^2*cos(omega*t+fai1);me*e(1)*omega^2*sin(omega*t+fai1);];% m(2)*e(1)*omega^2*cos(omega*t+fai1);% m(3)*e(2)*omega^2*cos(omega*t+fai1);Ke=K_global+a0*M_global+a1*C_global; % 等效刚度矩阵Fe(:,i-1)=F(:,(i-1))+M_global*(a0*u(:,i-1)+a2*v(:,i-1)+a3*a(:,i-1))+C_global*(a1*u(:,i-1)+a4*v(:,i-1)+a5*a(:,i-1)); % 求解t+Δt时刻的等效载荷u(:,i)=Ke\Fe(:,i-1); % 求解t+Δt时刻的位移a(:,i)=a0*(u(:,i)-u(:,i-1))-a2*v(:,i-1)-a3*a(:,i-1); % 求解t+Δt时刻的加速度v(:,i)=v(:,i-1)+a6*a(:,i-1)+a7*a(:,i); % 求解t+Δt时刻的速度endend% 动力学计算%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%t_transient = 20*T;% 提取稳态阶段数据(t >= t_transient)steady_indices = find(t0 >= t_transient);if isempty(steady_indices)continue;end% x_steady = y(steady_indices, 1);for j3=4x_steady = u(2*j3-1,steady_indices:end);% 寻找位移的局部极大值% [pks, ~] = findpeaks(x_steady(j3,:));for ff=1:20pks(ff)=max(x_steady(1+round(ff*T/dt):round((ff+1)*T/dt)));end% 保存分岔数据if ~isempty(pks)bifurcation_data0{j3} = [bifurcation_data0{j3};omega*ones(length(pks), 1), pks(:)];endendelapsed_time = toc; % 已耗时fprintf('已完成 %.2f %%,耗时 %.1f 秒 \n', idx * 100 / length(S_values), elapsed_time);
end% 绘制分岔图
j2=4;
figure;
scatter(bifurcation_data0{j2}(:,1)*60/2/pi, bifurcation_data0{j2}(:,2));
xlabel('\omega');
ylabel('Peak Displacement');
title('Rotor System Bifurcation Diagram');
grid on;figure;
plot(bifurcation_data0{j2}(:,1)*60/2/pi, bifurcation_data0{j2}(:,2),'k.');
xlabel('\omega');
ylabel('Peak Displacement');
title('Rotor System Bifurcation Diagram');
grid on;figure
plot(u(2*j2-1),v(2*j2-1),'b');
title([' 集中质量', num2str(j2), '相图 ']);该MATLAB脚本实现了一个转子系统的参数扫描和分岔分析,具体功能如下:
1. 转子系统建模
- 系统参数定义:
- 质量点数量
N = 5,每个节点自由度数为4(横向位移、转角等)。 - 定义了质量
m、转动惯量Jd和Jp、偏心距e、单元长度l、弹性模量EI和EA等参数。
- 质量点数量
- 矩阵构建:
- 生成质量矩阵
M、刚度矩阵K和陀螺矩阵G,并通过比例阻尼模型构建阻尼矩阵C_global。
- 生成质量矩阵
2. 参数扫描分析
- 转速范围扫描:
- 对转速
S_values = 500:200:20000 rpm进行循环,模拟不同转速下的系统响应。
- 对转速
- 动力学计算:
- 使用 Newmark-β方法 求解转子系统的瞬态动力学响应,考虑以下激励:
- 轴承力:通过函数
zhouchengli2计算非线性轴承力(需自定义)。 - 重力:作用在垂直方向。
- 偏心力:由质量偏心引起的周期性激励(频率与转速相关)。
- 轴承力:通过函数
- 使用 Newmark-β方法 求解转子系统的瞬态动力学响应,考虑以下激励:
3. 分岔分析
- 稳态数据提取:
- 舍弃前20个周期的瞬态响应,提取稳态阶段的位移数据。
- 对每个转速下的稳态位移,记录局部极大值(峰值)。
- 分岔图绘制:
- 绘制第4个质量点的分岔图,横轴为转速(
ω),纵轴为位移峰值,展示系统随转速变化的非线性行为(如周期、拟周期或混沌运动)。
- 绘制第4个质量点的分岔图,横轴为转速(
4. 结果可视化
- 分岔图:
- 使用散点图(
scatter)和点线图(plot)展示分岔数据。
- 使用散点图(
- 相图:
- 绘制第4个质量点的位移-速度相图,用于观察系统的动力学状态(如极限环、混沌吸引子等)。
关键功能总结
- 参数化建模:通过矩阵组装实现多自由度转子系统的动力学建模。
- 非线性响应分析:结合轴承力、偏心力等非线性因素,模拟转子在不同转速下的振动特性。
- 分岔检测:通过峰值提取和绘图,识别系统的临界转速和非线性现象(如倍周期分岔)。
注意事项
- 需补充自定义函数
zhouchengli2的实现(轴承力计算)。 - 分岔分析仅针对第4个质量点,可通过修改
j2或循环分析其他节点。 - 计算耗时较长(因参数扫描范围大),可通过并行计算优化。
该脚本适用于转子动力学研究,特别是临界转速和非线性振动行为的分析。
相关文章:

MATLAB脚本实现了一个转子系统的参数扫描和分岔分析
% 参数扫描范围 clc; clear; close all;S_values 500:200:20000; % 转速范围% 定义系统参数 N 5; % 质量点数量 num_nodes N; % 节点数 num_dofs_per_node 4; % 每个节点的自由度数 num_elements num_nodes-1; % 单元数 total_dofs num_nodes * num_dofs_per_node; % 总自…...
UWP发展历程
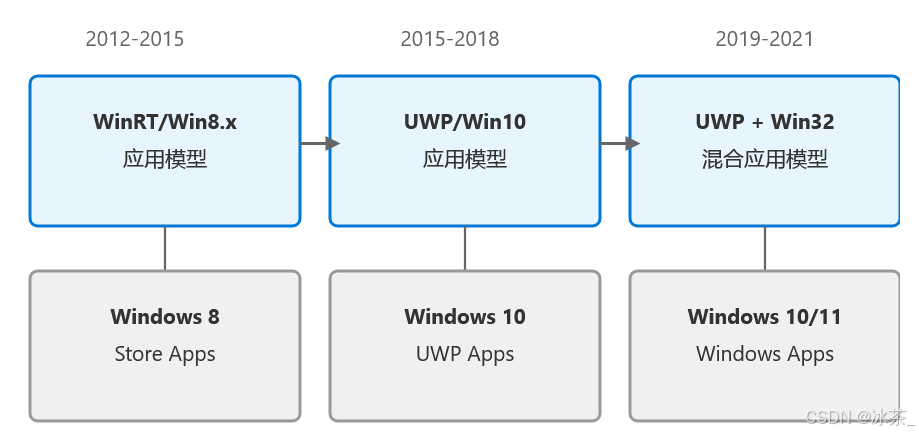
通用Windows平台(UWP)发展历程 引言 通用Windows平台(Universal Windows Platform, UWP)是微软为实现"一次编写,处处运行"的愿景而打造的现代应用程序平台。作为微软统一Windows生态系统的核心战略组成部分,UWP代表了从传统Win32应用向现代应…...
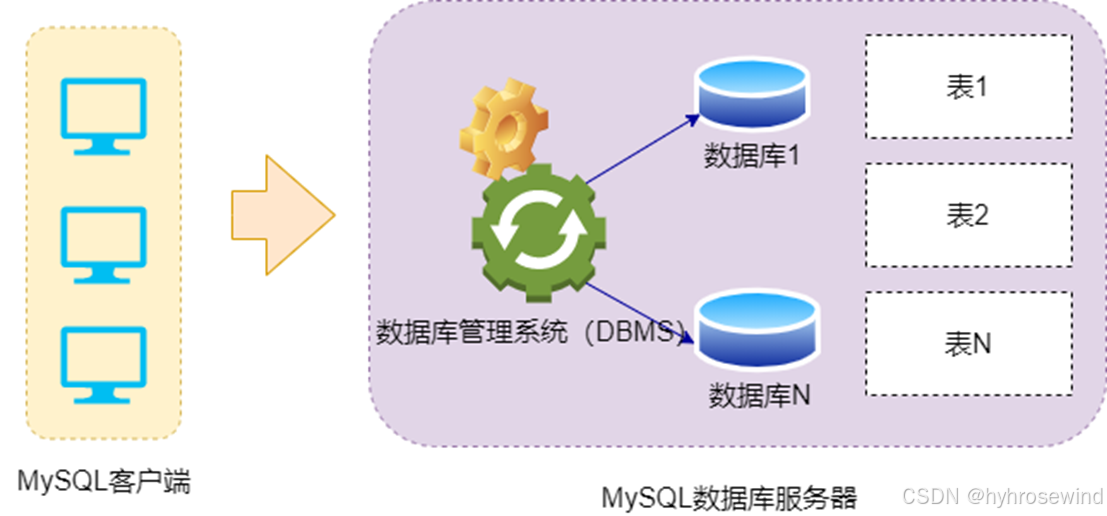
数据库相关概念,关系型数据库的核心要素,MySQL(特点,安装,环境变量配置,启动,停止,客户端连接),数据模型
目录 数据库相关概念 MySQL(特点,安装,环境变量配置,启动和停止,客户端连接) MySQL数据库的特点 Windows下安装MySQL MySQL 8.0.36(安装版) MySQL安装 配置Path环境变量 MySQ…...

Facebook隐私保护:从技术到伦理的探索
在这个数字化时代,隐私保护已成为公众关注的焦点。Facebook,作为全球最大的社交媒体平台之一,其用户隐私保护问题更是引起了广泛的讨论。本文将从技术层面和伦理层面探讨 Facebook 在隐私保护方面的努力和挑战。 技术层面的隐私保护 在技术…...

三维点拟合平面ransac c++
理论 平面的一般定义 在三维空间中,一个平面可以由两个要素唯一确定: 法向量 n(a,b,c):垂直于平面的方向 平面上一点 平面上任意一点 p(x,y,z) 满足: ( p − p 0 ) ∗ n 0 (p - p0) * n 0 (p−p0)∗n0 即 a ( x − x 0 ) …...
香港服务器CPU对比:Intel E3与E5系列核心区别与使用场景
香港服务器的 CPU 配置(核心数与主频)直接决定了其并发处理能力和数据运算效率,例如高频多核处理器可显著提升多线程任务响应速度。在实际业务场景中,不同负载需求对 CPU 架构的要求存在显著差异——以 Intel E3 和 E5 系列为例,由于两者在性…...
ChatGPT-o3辅助学术大纲效果如何?
目录 1 引言 2 背景综述 2.1 自动驾驶雷达感知 2.2 生成模型演进:从 GAN 到 Diffusion 3 相关工作 3.1 雷达点云增强与超分辨率 3.2 扩散模型在数据增广中的应用 4 方法论 4.1 问题定义与总览 4.2 数据预处理与雷达→体素表示 4.3 潜在体素扩散网络&…...

AI大模型API文档的核心内容概述,以通用框架和典型实现为例
以下是AI大模型API文档的核心内容概述,以通用框架和典型实现为例: 一、API基础架构 1. 基础信息 API类型:RESTful API或gRPC(如阿里云通义千问支持HTTPS接口)请求方式:通常为POST方法基础URL:…...
使用pnpm第一次运行项目报错 ERR_PNPM_NO_PKG_MANIFEST No package.json found in E:\
开始用unibestpnpm写一个小程序 运行pnpm init报错 如标题所示没有package.json这个文件 博主犯了一个很愚蠢的错误。。 准备方案手动创建一个json文件 此时才发现没到根目录下,创建了一个项目之后就没有切入文件夹里。 切入根目录再下载就成功啦...

单线服务器有什么优点
单线服务器是一个普遍存在的术语,它是指一种服务器连接互联网时只使用一个物理线路的服务器。简单来说,就是使用一条网络线路的服务器,上传和下载的数据都通过一个通道实现。在当今数字化的时代,服务器的选择至关重要。今天&#…...

手持式三维扫描设备赋能智能汽车制造
随着电动化与智能化趋势的加速,传统逆向工程手段已难以满足复杂零部件的建模需求。 3D逆向建模技术,为汽车制造企业提供高效、精准的数字化解决方案。 传统汽车零部件的尺寸检测与建模依赖三坐标测量机(CMM)或人工测绘&#…...

FA-YOLO:基于FMDS与AGMF的高效目标检测算法解析
本文《FA-YOLO: Research On Efficient Feature Selection YOLO Improved Algorithm Based On FMDS and AGMF Modules》针对YOLO系列在特征融合与动态调整上的不足,提出两种创新模块:FMDS(细粒度多尺度动态选择模块)和AGMF(自适应门控多分支聚焦融合模块)。论文结构…...

Hutool之DateUtil:让Java日期处理变得更加简单
前言 在Java开发中,日期和时间的处理是一个常见问题。为了简化这个过程,许多开发者会使用第三方工具包,如Hutool。Hutool是一个Java工具包,提供了许多实用的功能,其中之一就是日期处理。日期时间工具类是Hutool的核心包…...
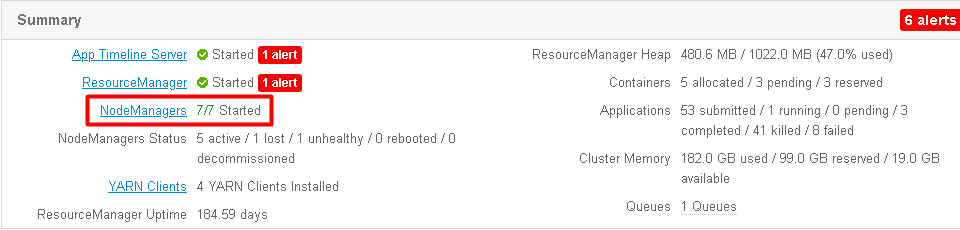
Ambari 中移除/重装 yarn 集群中的 NodeManager 节点
文章目录 背景分析解决分析:现有 NodeManager 情况移除:240 服务器上的 NodeManager重新安装:240 服务器上的安装 NodeManager疑问为什么直接添加就可以运行?参考背景 项目中有Spark应用,主要在 yarn 集群中部署。 现在发现 yarn 集群中的节点资源过剩,需要将部分节点移…...

小程序在 skyline 下如何开启多行省略
参考:https://developers.weixin.qq.com/community/develop/doc/000a648baacca06e83f1034d66c000 前言 小程序在 skyline 下不支持 line-clamp,想要开启多行省略使用 text 组件的 max-lines 结合 overflow 属性。 解决办法:skyline 下不支…...

uni.createInnerAudioContext踩坑duration在真机环境一直为0
解决 uni.createInnerAudioContext 的 duration 在真机环境一直为 0 的问题 在使用 uni.createInnerAudioContext 播放音频时,开发者可能会遇到以下问题: duration 在真机环境中一直为 0:即使音频文件是正常的,duration 属性也无法正确获取音频的时长。音频实例未放到全局…...
《MySQL:MySQL数据类型分类》
数据类型分类 数值类 tinyint类型 数值越界测试。 在MySQL中,整型可以指定是有符号的和无符号的,默认是有符号的。 可以通过UNSIGNED来说明某个字段是无符号的。 无符号整型数值越界测试。 如果我们向mysql特定的类型中插入不合法的数据,my…...

Kubernetes》》k8s》》Namespace
Namespace 概述 Namespace(命名空间) 是 Kubernetes 中用于逻辑隔离集群资源的机制,可将同一集群划分为多个虚拟环境,适用于多团队、多项目或多环境(如开发、测试、生产)的场景。 核心作用: 资…...
ZYNQ笔记(八):UART 串口中断
版本:Vivado2020.2(Vitis) 任务:UART串口中断实验,实现串口中断数据回环(接收数据并发送出去) 目录 一、介绍 二、硬件设计 三、软件设计 四、效果 一、介绍 ZYNQ 的 UART(Unive…...

vue3 nprogress 使用
nprogress 介绍与作用 1.nprogress 是一个轻量级的进度条组件,主要用于在页面加载或路由切换时显示一个进度条,提升用户体验。它的原理是通过在页面顶部创建一个 div,并使用 fixed 定位来实现进度条的效果 2.在 Vite Vue 3 项目中…...
,Redis 在微服务环境中的优势和劣势是什么?)
相比其他缓存/内存数据库(如 Memcached, Ehcache 等),Redis 在微服务环境中的优势和劣势是什么?
我们来比较一下 Redis 与 Memcached、Hazelcast、Ehcache 等在微服务环境下的优势和劣势。 Redis 的优势 : 丰富的数据结构 (Rich Data Structures): 优势: 这是 Redis 最显著的优势之一。除了简单的 Key-Value (字符串) 外,Redis 还原生支持 Lists, Sets, Sorted …...
生态篇|多总线融合与网关设计
引言 1. 车内多总线概览 2. 主流车载总线技术对比 3. 网关设计原则与架构 4. 协议转换与映射策略 5. 安全与诊断功能集成...

Node做BFF中间层架构优化前端开发体验并提升系统整体性能。
文章目录 1. BFF 层的定位2. 技术选型3. 架构设计3.1 分层设计3.2 示例架构 4. 核心功能实现4.1 数据聚合4.2 权限校验4.3 缓存优化 5、实战示例1. 场景说明2. ECharts 数据格式要求3. BFF 层实现步骤3.1 接收前端参数3.2 调用后端服务获取数据 4. 前端使用 总结 在使用 Node.j…...
基于autoware1.14的实车部署激光雷达循迹,从建图、定位、录制轨迹巡航点、到实车运行。
1.首先安装autoware ,大家可以以下一下博客进行安装,如果缺少库什么的直接问ai安装对应的库就行。ubuntu18.04安装Autoware1.14---GPU版 最全环境配置说明_autoware1.14安装教程-CSDN博客 安装成功后运行: source install/setup.bash roslau…...

数据类型相关问题导致的索引失效 | OceanBase SQL 优化实践
背景 针对在OceanBase 论坛中遇到的一些典型SQL调优问题,进行记录与总结,分享给大家。本文介绍的事3个场景:数据类型不匹配、字符集相关属性不匹配,和过滤/联接条件上包含系统函数。 场景一:数据类型不匹配 类型不匹…...
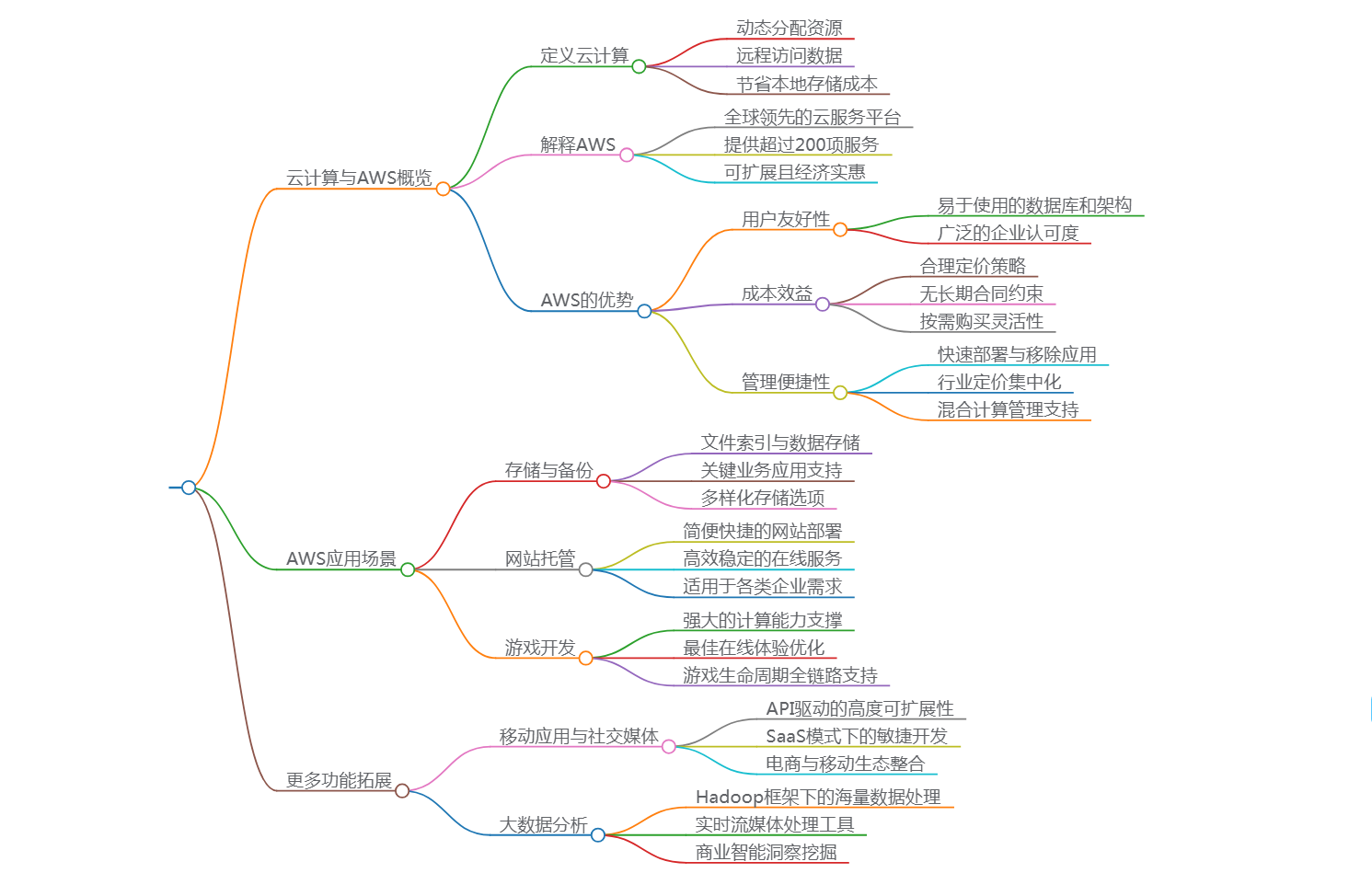
云计算(Cloud Computing)概述——从AWS开始
李升伟 编译 无需正式介绍亚马逊网络服务(Amazon Web Services,简称AWS)。作为行业领先的云服务提供商,AWS为全球开发者提供了超过170项随时可用的服务。 例如,Adobe能够独立于IT团队开发和更新软件。通过AWS的服务&…...
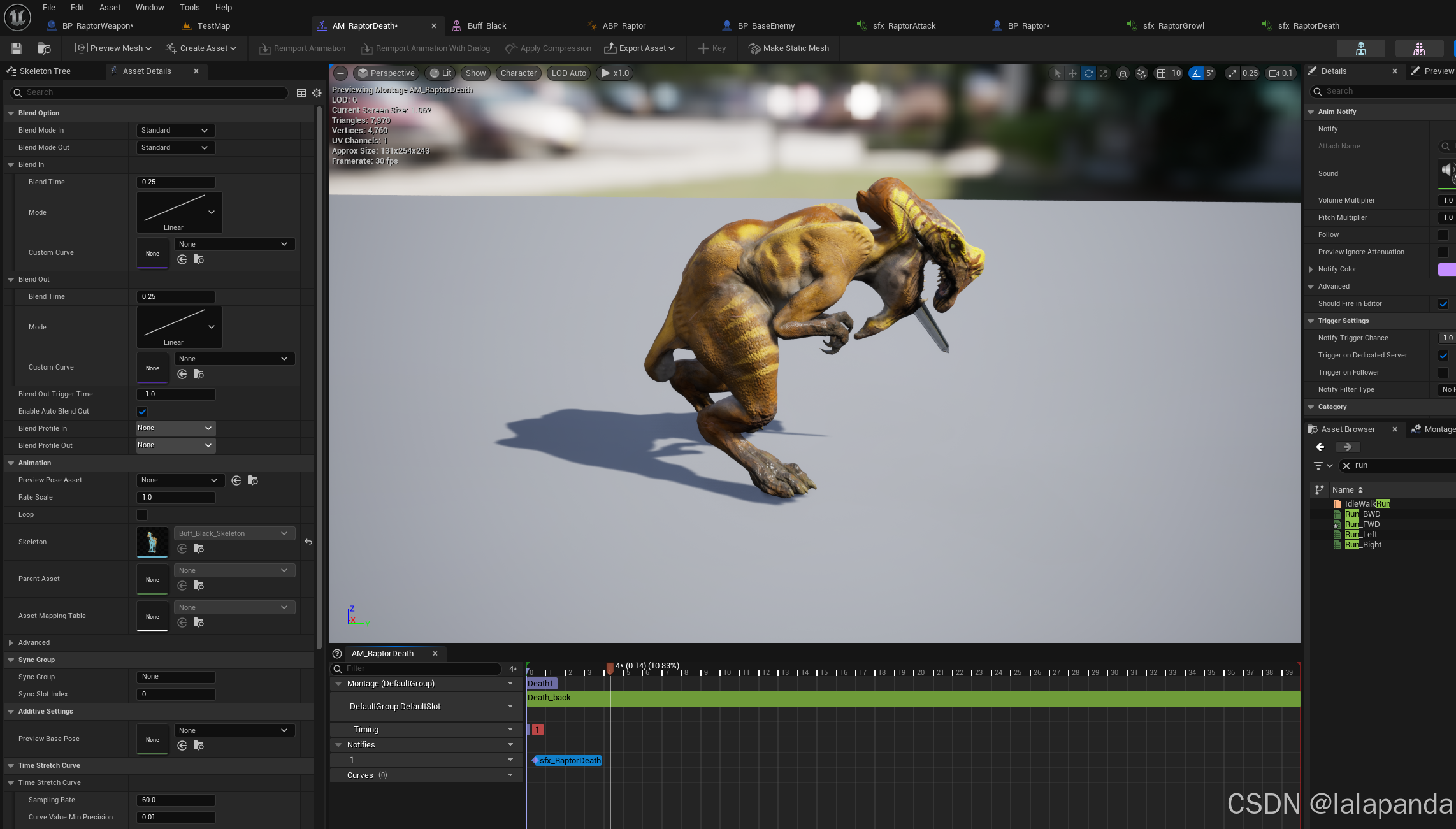
UE学习记录part18
225 animation blueprint templates: generic animation blueprints 在Animation Blueprint中选择template生成动画蓝图模板 在function中选择blurprintthreadsafeupdateanimation,用于做数据的更新 先创建变量,再将变量再blueprintinitializeanimation…...

刀片服务器的散热构造方式
刀片服务器的散热构造是其高密度、高性能设计的核心挑战之一。其散热系统需在有限空间内高效处理多个刀片模块产生的集中热量,同时兼顾能耗、噪音和可靠性。以下从模块化架构、核心散热技术、典型方案对比、厂商差异及未来趋势等方面展开分析: 一、模块化散热架构 刀片服务器…...

算法01-最小生成树prim算法
最小生成树prim算法 题源:代码随想录卡哥的题 链接:https://kamacoder.com/problempage.php?pid1053 时间:2025-04-18 难度:4⭐ 题目: 1. 题目描述: 在世界的某个区域,有一些分散的神秘岛屿&…...

【每日八股】复习计算机网络 Day1:TCP 的头部结构 + TCP 确保可靠传输 + TCP 的三次握手
文章目录 复习计算机网络 Day1TCP 的头部结构TCP 如何保证可靠传输?1. 数据完整性保障2. 顺序与去重控制3. 流量与拥塞控制4. 连接控制5. 其他辅助机制TCP 可靠传输的保障手段总结 TCP 的三次握手?TCP 为什么要三次握手?TCP 三次握手出现报文…...