ZYNQ笔记(八):UART 串口中断
版本:Vivado2020.2(Vitis)
任务:UART串口中断实验,实现串口中断数据回环(接收数据并发送出去)
目录
一、介绍
二、硬件设计
三、软件设计
四、效果
一、介绍
ZYNQ 的 UART(Universal Asynchronous Receiver/Transmitter,通用异步收发器) 是一种串行通信接口,用于在 ZYNQ 的 PS 端和外部设备之间进行异步数据传输。
UART 的主要特性
-
支持标准 UART 协议(8-N-1、7-bit 数据位、奇偶校验等)。
-
可编程波特率(最高可达 1 Mbps,取决于时钟配置)。
-
双缓冲(FIFO)支持(减少 CPU 中断负载)。
-
中断或轮询模式(可配置 DMA 传输)。
-
硬件流控(可选)(RTS/CTS 信号)。
-
集成在 PS(ARM)端,通常通过 MIO 或 EMIO 连接至外部引脚。
注意:使用UART串口有中断和轮询两种方式,之前的例程只是串口打印发送,真正使用UART 进行接收和发送时需要进行初始化,并且通过中断和轮询的方式使用串口(一般选择中断)。
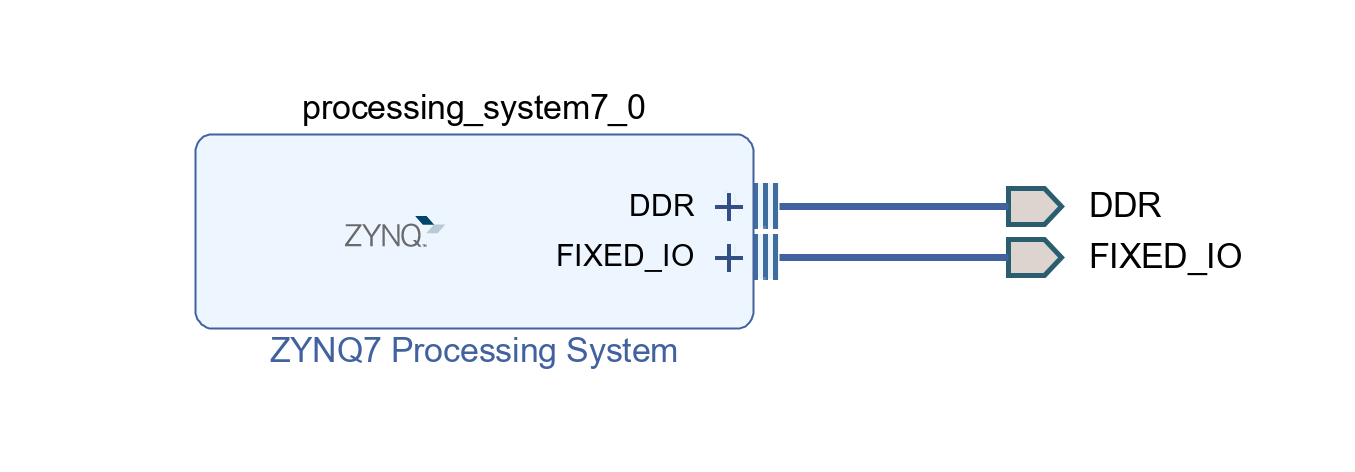
二、硬件设计
(1)硬件设计同 ZYNQ笔记(一):hello world 一致,直接沿用。
(2)最后整体 bd 设计部分如图所示:设计检查、Generate Output Products、 Create HDL Wrapper、管脚约束(无PL部分,跳过)、Gnerate Bitstream(无PL部分,跳过)、Export Hardware(无PL部分,不包含比特流文件)、启动Vitis
三、软件设计
(1)这里提一下 UART 有四种工作模式:
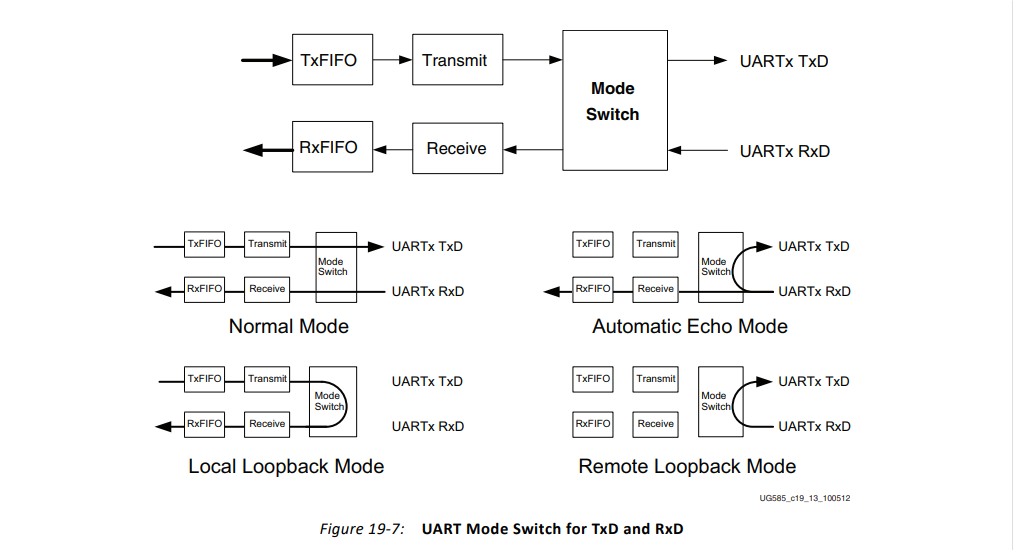
| 工作模式 | 数据流向 | 主要用途 | 特点 |
|---|---|---|---|
| Normal Mode 正常模式 | TxD → 外部设备 RxD ← 外部设备 | 正常通信模式, 与外部设备双向传输数据 | 标准 UART 操作,依赖 FIFO 缓冲和流控 |
| Automatic Echo Mode 自动回环模式 | RxD 接收数据,同时自动回环到 TxD 发送 | 测试 UART 自身收发功能 (无需外部设备) | 接收端数据直接回传,用于验证硬件是否正常 |
| Local Loopback Mode 本地回环模式 | TxD 数据内部回环到 RxD(不经过物理引脚) | 测试芯片内部 UART 控制器和软件逻辑(隔离外部信号干扰) | 避免外部线路影响,排查软件或驱动问题 |
| Remote Loopback Mode 远程回环模式 | RxD 接收数据直接回环到 TxD 发送 | 测试完整通信链路 (包括物理线路和外部设备) | 验证线路完整性,检测信号衰减或干扰 |
(2)设置UART中断触发类型,通过 XUartPs_SetInterruptMask 函数实现,掩码定义在 xuartps_hw.h 头文件,如图所示,本例采用 RX 接收端 FIFO(达到阈值)触发。
/** @name Interrupt Registers** Interrupt control logic uses the interrupt enable register (IER) and the* interrupt disable register (IDR) to set the value of the bits in the* interrupt mask register (IMR). The IMR determines whether to pass an* interrupt to the interrupt status register (ISR).* Writing a 1 to IER Enbables an interrupt, writing a 1 to IDR disables an* interrupt. IMR and ISR are read only, and IER and IDR are write only.* Reading either IER or IDR returns 0x00.** All four registers have the same bit definitions.** @{*/
#define XUARTPS_IXR_RBRK 0x00002000U /**< Rx FIFO break detect interrupt */
#define XUARTPS_IXR_TOVR 0x00001000U /**< Tx FIFO Overflow interrupt */
#define XUARTPS_IXR_TNFUL 0x00000800U /**< Tx FIFO Nearly Full interrupt */
#define XUARTPS_IXR_TTRIG 0x00000400U /**< Tx Trig interrupt */
#define XUARTPS_IXR_DMS 0x00000200U /**< Modem status change interrupt */
#define XUARTPS_IXR_TOUT 0x00000100U /**< Timeout error interrupt */
#define XUARTPS_IXR_PARITY 0x00000080U /**< Parity error interrupt */
#define XUARTPS_IXR_FRAMING 0x00000040U /**< Framing error interrupt */
#define XUARTPS_IXR_OVER 0x00000020U /**< Overrun error interrupt */
#define XUARTPS_IXR_TXFULL 0x00000010U /**< TX FIFO full interrupt. */
#define XUARTPS_IXR_TXEMPTY 0x00000008U /**< TX FIFO empty interrupt. */
#define XUARTPS_IXR_RXFULL 0x00000004U /**< RX FIFO full interrupt. */
#define XUARTPS_IXR_RXEMPTY 0x00000002U /**< RX FIFO empty interrupt. */
#define XUARTPS_IXR_RXOVR 0x00000001U /**< RX FIFO trigger interrupt. */
#define XUARTPS_IXR_MASK 0x00003FFFU /**< Valid bit mask */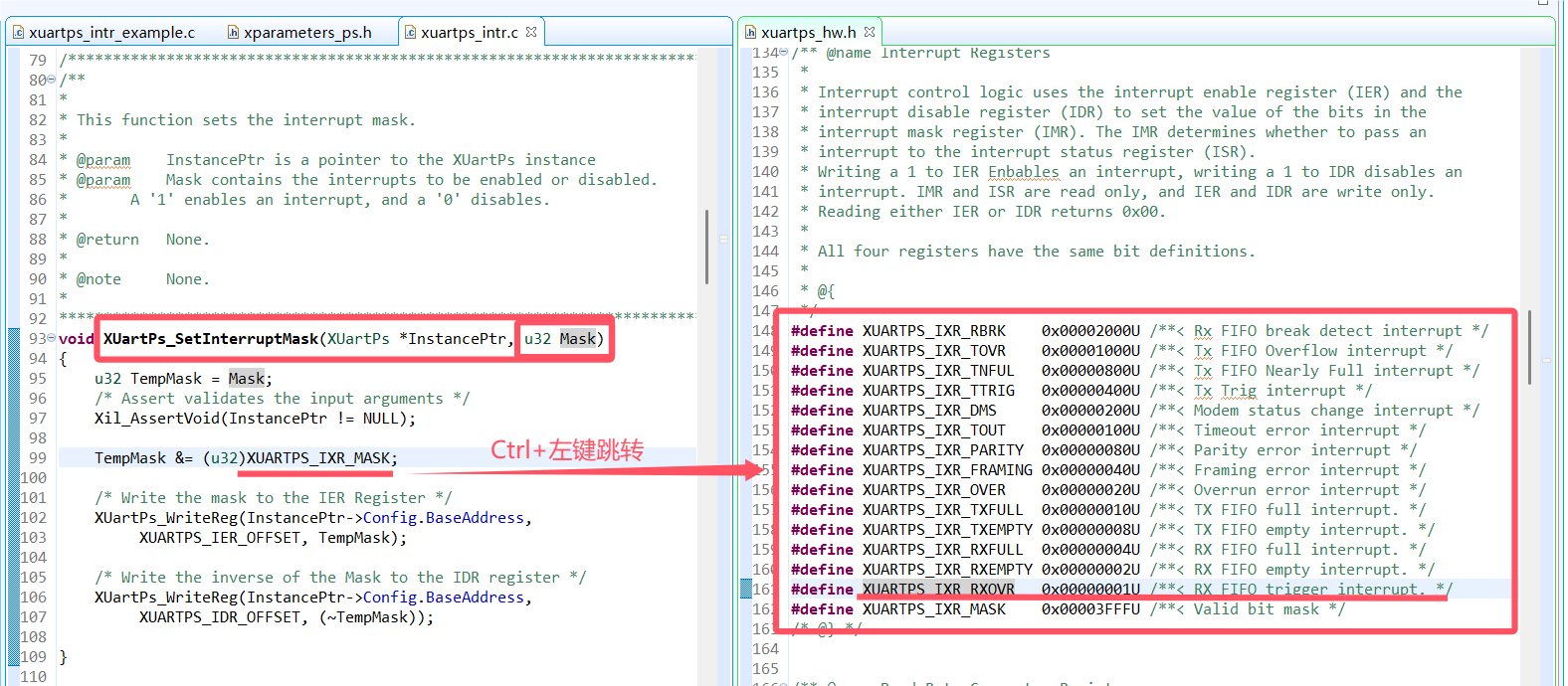
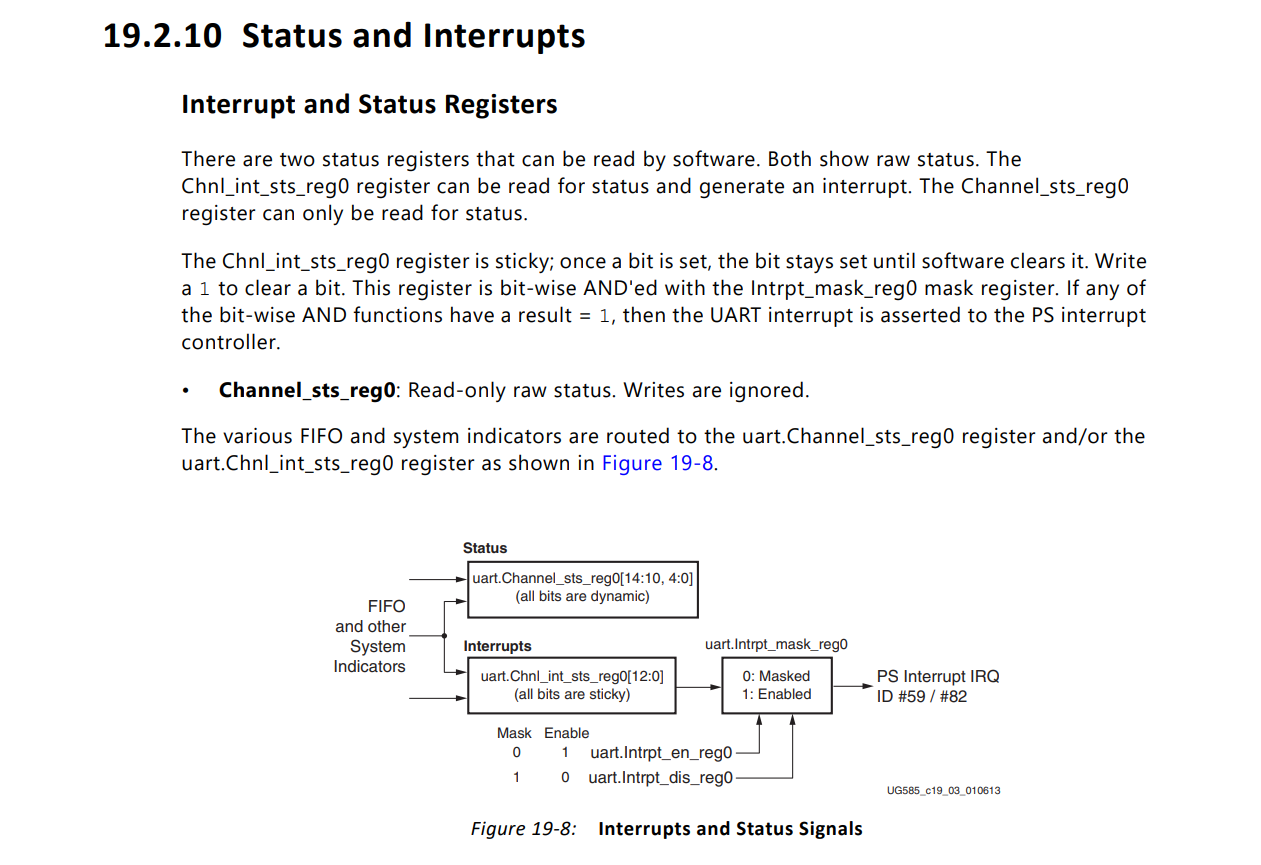
(3)UART中断控制原理:可以简单理解为"开关+触发器"的组合,通过掩码(IMR)和中断状态(ISR)两个寄存器协同工作:一种中断触发类型各对应一个掩码位和状态位,当任一触发类型的掩码位和状态位都有效时,UART产生中断请求信号。
因为UART支持多种中断触发方式,所以中断处理函数部分需要对中断类型进行判断,可以根据不同的触发方式分情况进行处理。
中断函数具体操作方式:1.读取状态寄存器、掩码寄存器(通过(2)设置),并进行相与(相与之后的结果就是表示当前串口的中断状态)、2. 将相与结果再与上需要判断的中断触发类型掩码,进行 if 判断(相于后只有触发类型一致时,相应位才得1,其余位为0,通过 if 判断)。
(4)完整设计代码:
#include "xparameters.h"
#include "xil_printf.h"
#include "xuartps.h"
#include "xscugic.h"//==========================自定义宏==========================//#define UART_DEVICE_ID XPAR_XUARTPS_0_DEVICE_ID //宏定义UART器件ID
#define INTC_DEVICE_ID XPAR_SCUGIC_SINGLE_DEVICE_ID //宏定义中断控制器(GIC)ID
#define UART_INTR_ID XPAR_XUARTPS_1_INTR //宏定义UART中断号(中断ID)//===========================实例化===========================//XUartPs Uart; //UART驱动实例
XScuGic Intc; //中断控制器驱动实例//========================函数变量声明========================//static int Uart_Intr_Init(); //UART中断初始化
static void IntrHandler(void *CallBackRef); //中断处理函数
static void Setup_Intr_System(XScuGic *intr, XUartPs *uart,u16 uart_intr_id); //建立中断系统//===========================主函数===========================//int main()
{//串口中断初始化Uart_Intr_Init();//建立中断系统Setup_Intr_System(&Intc, &Uart, UART_INTR_ID);//打印Debug信息xil_printf("UART Interrupt Test\r\n");while(1)return 0;
}//========================中断处理函数========================//
/* @param CallBackRef 用户自定义回调参数(对应UART实例指针)*/
void IntrHandler(void *CallBackRef)
{u8 rec_data;u32 IntrStatus;//将回调参数转为UART实例指针,用于操作硬件(例规范化设计)XUartPs *UartInstPtr = (XUartPs *) CallBackRef;//读取中断ID寄存器,获取中断触发类型IntrStatus = XUartPs_ReadReg(UartInstPtr->Config.BaseAddress,XUARTPS_IMR_OFFSET);//读取掩码IntrStatus &= XUartPs_ReadReg(UartInstPtr->Config.BaseAddress,XUARTPS_ISR_OFFSET);//读取状态//判断中断类型并执行中断处理(与上对应中断类型掩码)//本例只设置了一种中断类型,有多种时通过if判断分情况处理if (IntrStatus & (u32)XUARTPS_IXR_RXOVR){//接收发送的字节rec_data = XUartPs_RecvByte(XPAR_XUARTPS_0_BASEADDR);//发送数据XUartPs_SendByte(XPAR_XUARTPS_0_BASEADDR,rec_data);//清除中断状态XUartPs_WriteReg(UartInstPtr->Config.BaseAddress,XUARTPS_ISR_OFFSET, XUARTPS_IXR_RXOVR);}
}//======================UART中断初始化=======================//
int Uart_Intr_Init()
{//定义UART控制器配置信息(指针)XUartPs_Config *UartConfig;//根据UART ID,查找配置信息UartConfig = XUartPs_LookupConfig(UART_DEVICE_ID);//初始化UART控制器驱动XUartPs_CfgInitialize(&Uart, UartConfig, UartConfig->BaseAddress);//设置工作模式:正常模式XUartPs_SetOperMode(&Uart, XUARTPS_OPER_MODE_NORMAL);//设置波特率:115200XUartPs_SetBaudRate(&Uart,115200);//(可选)串口自检:基本设置完成后,调用该函数进行串口自检并返回状态int Status = XUartPs_SelfTest(&Uart);if (Status != XST_SUCCESS) {xil_printf("UART SelfTest Failed\r\n");return XST_FAILURE;}return XST_SUCCESS;
}//=======================建立中断系统=======================//
/* 建立中断系统,UART接收到数据时产生中断* @param intr 是指向 XScuGic驱动实例的指针* @param uart 是指向 XUartPs驱动实例的指针* @param uart_intr_id 是 UART控制器ID*/
void Setup_Intr_System(XScuGic *intr, XUartPs *uart, u16 uart_intr_id)
{//定义中断控制器配置信息(指针)XScuGic_Config * IntcConfig;//根据中断控制器ID,查找GIC配置信息IntcConfig = XScuGic_LookupConfig(INTC_DEVICE_ID);//初始化中断控制器驱动XScuGic_CfgInitialize(intr, IntcConfig, IntcConfig->CpuBaseAddress);//设置中断异常处理功能Xil_ExceptionInit();Xil_ExceptionRegisterHandler(XIL_EXCEPTION_ID_INT,(Xil_ExceptionHandler) XScuGic_InterruptHandler,(void *) intr);//使能处理器中断Xil_ExceptionEnable();//关联中断处理函数XScuGic_Connect(intr, uart_intr_id,(Xil_ExceptionHandler) IntrHandler,(void *) uart);//设置FIFO阈值:1字节,即接收多少字节数据触发中断XUartPs_SetFifoThreshold(uart, 1);//设置UART中断触发类型:接收端FIFO触发中断(添加触发类型直接或“|”,各触发类型掩码位是独立的)XUartPs_SetInterruptMask(uart, XUARTPS_IXR_RXOVR);//使能UART中断XScuGic_Enable(intr, uart_intr_id);
}
四、效果
上板后串口打印Debug信息,随后每向板卡发送数据,板卡会将数据接收并发送回来。
相关文章:
ZYNQ笔记(八):UART 串口中断
版本:Vivado2020.2(Vitis) 任务:UART串口中断实验,实现串口中断数据回环(接收数据并发送出去) 目录 一、介绍 二、硬件设计 三、软件设计 四、效果 一、介绍 ZYNQ 的 UART(Unive…...

vue3 nprogress 使用
nprogress 介绍与作用 1.nprogress 是一个轻量级的进度条组件,主要用于在页面加载或路由切换时显示一个进度条,提升用户体验。它的原理是通过在页面顶部创建一个 div,并使用 fixed 定位来实现进度条的效果 2.在 Vite Vue 3 项目中…...
,Redis 在微服务环境中的优势和劣势是什么?)
相比其他缓存/内存数据库(如 Memcached, Ehcache 等),Redis 在微服务环境中的优势和劣势是什么?
我们来比较一下 Redis 与 Memcached、Hazelcast、Ehcache 等在微服务环境下的优势和劣势。 Redis 的优势 : 丰富的数据结构 (Rich Data Structures): 优势: 这是 Redis 最显著的优势之一。除了简单的 Key-Value (字符串) 外,Redis 还原生支持 Lists, Sets, Sorted …...
生态篇|多总线融合与网关设计
引言 1. 车内多总线概览 2. 主流车载总线技术对比 3. 网关设计原则与架构 4. 协议转换与映射策略 5. 安全与诊断功能集成...

Node做BFF中间层架构优化前端开发体验并提升系统整体性能。
文章目录 1. BFF 层的定位2. 技术选型3. 架构设计3.1 分层设计3.2 示例架构 4. 核心功能实现4.1 数据聚合4.2 权限校验4.3 缓存优化 5、实战示例1. 场景说明2. ECharts 数据格式要求3. BFF 层实现步骤3.1 接收前端参数3.2 调用后端服务获取数据 4. 前端使用 总结 在使用 Node.j…...
基于autoware1.14的实车部署激光雷达循迹,从建图、定位、录制轨迹巡航点、到实车运行。
1.首先安装autoware ,大家可以以下一下博客进行安装,如果缺少库什么的直接问ai安装对应的库就行。ubuntu18.04安装Autoware1.14---GPU版 最全环境配置说明_autoware1.14安装教程-CSDN博客 安装成功后运行: source install/setup.bash roslau…...

数据类型相关问题导致的索引失效 | OceanBase SQL 优化实践
背景 针对在OceanBase 论坛中遇到的一些典型SQL调优问题,进行记录与总结,分享给大家。本文介绍的事3个场景:数据类型不匹配、字符集相关属性不匹配,和过滤/联接条件上包含系统函数。 场景一:数据类型不匹配 类型不匹…...
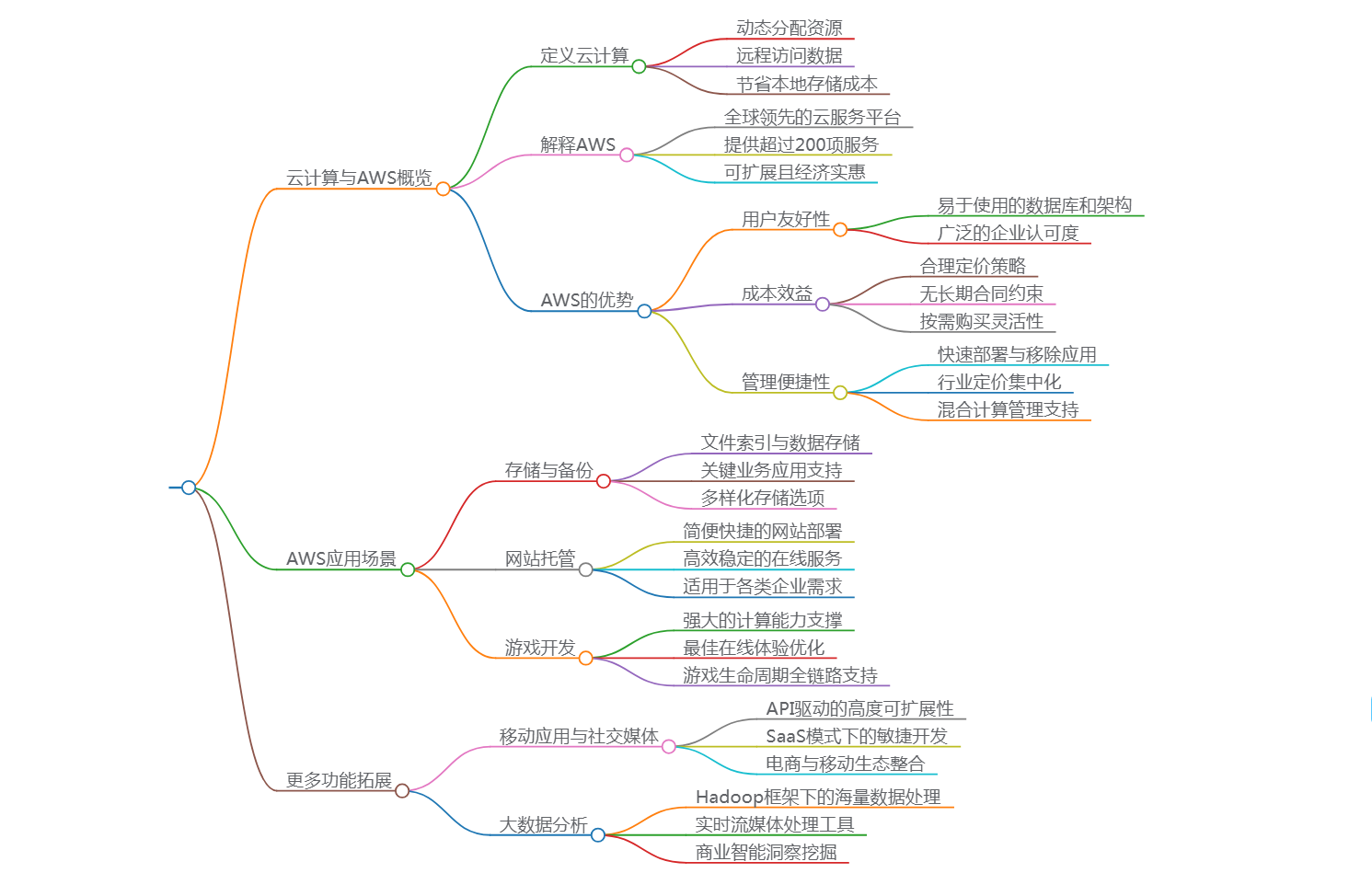
云计算(Cloud Computing)概述——从AWS开始
李升伟 编译 无需正式介绍亚马逊网络服务(Amazon Web Services,简称AWS)。作为行业领先的云服务提供商,AWS为全球开发者提供了超过170项随时可用的服务。 例如,Adobe能够独立于IT团队开发和更新软件。通过AWS的服务&…...
UE学习记录part18
225 animation blueprint templates: generic animation blueprints 在Animation Blueprint中选择template生成动画蓝图模板 在function中选择blurprintthreadsafeupdateanimation,用于做数据的更新 先创建变量,再将变量再blueprintinitializeanimation…...

刀片服务器的散热构造方式
刀片服务器的散热构造是其高密度、高性能设计的核心挑战之一。其散热系统需在有限空间内高效处理多个刀片模块产生的集中热量,同时兼顾能耗、噪音和可靠性。以下从模块化架构、核心散热技术、典型方案对比、厂商差异及未来趋势等方面展开分析: 一、模块化散热架构 刀片服务器…...

算法01-最小生成树prim算法
最小生成树prim算法 题源:代码随想录卡哥的题 链接:https://kamacoder.com/problempage.php?pid1053 时间:2025-04-18 难度:4⭐ 题目: 1. 题目描述: 在世界的某个区域,有一些分散的神秘岛屿&…...

【每日八股】复习计算机网络 Day1:TCP 的头部结构 + TCP 确保可靠传输 + TCP 的三次握手
文章目录 复习计算机网络 Day1TCP 的头部结构TCP 如何保证可靠传输?1. 数据完整性保障2. 顺序与去重控制3. 流量与拥塞控制4. 连接控制5. 其他辅助机制TCP 可靠传输的保障手段总结 TCP 的三次握手?TCP 为什么要三次握手?TCP 三次握手出现报文…...
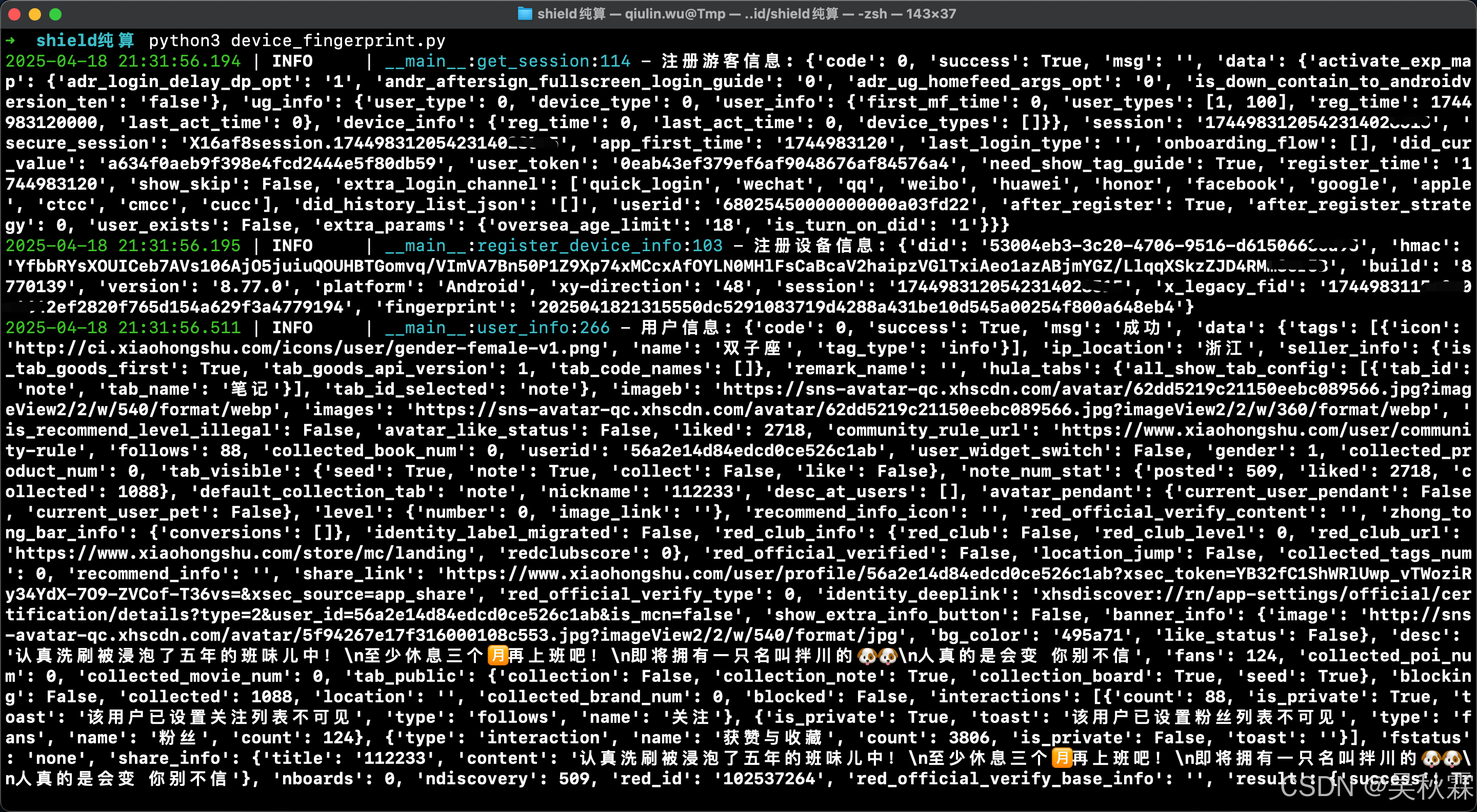
device_fingerprint、device_id、hmac生成
文章目录 1. 写在前面2. 设备信息3. 数美指纹 【🏠作者主页】:吴秋霖 【💼作者介绍】:擅长爬虫与JS加密逆向分析!Python领域优质创作者、CSDN博客专家、阿里云博客专家、华为云享专家。一路走来长期坚守并致力于Python…...

高防IP如何针对DDoS攻击特点起防护作用
高防IP通过多层防护机制和动态资源调度能力,针对性化解DDoS攻击的核心特征(如大流量、协议滥用、连接耗尽等)。以下是其具体防护策略与技术实现: 一、DDoS攻击的核心特点与高防IP的针对性策略 攻击特…...

python抓取HTML页面数据+可视化数据分析(投资者数量趋势)
本文所展示的代码是一个完整的数据采集、处理与可视化工具,主要用于从指定网站下载Excel文件,解析其中的数据,并生成投资者数量的趋势图表。以下是代码的主要功能模块及其作用: 1.网页数据获取 使用fetch_html_page函数从目标网…...

C++ std::function的含义、意义和用法,与std::bind的区别
在 C 中,std::function 是一个通用的多态函数包装器,它是 C 标准库 <functional> 头文件中的一部分。下面从含义、意义和用法三个方面详细介绍 std::function。 含义 std::function 是一个类模板,它可以存储、复制和调用任何可调用对…...
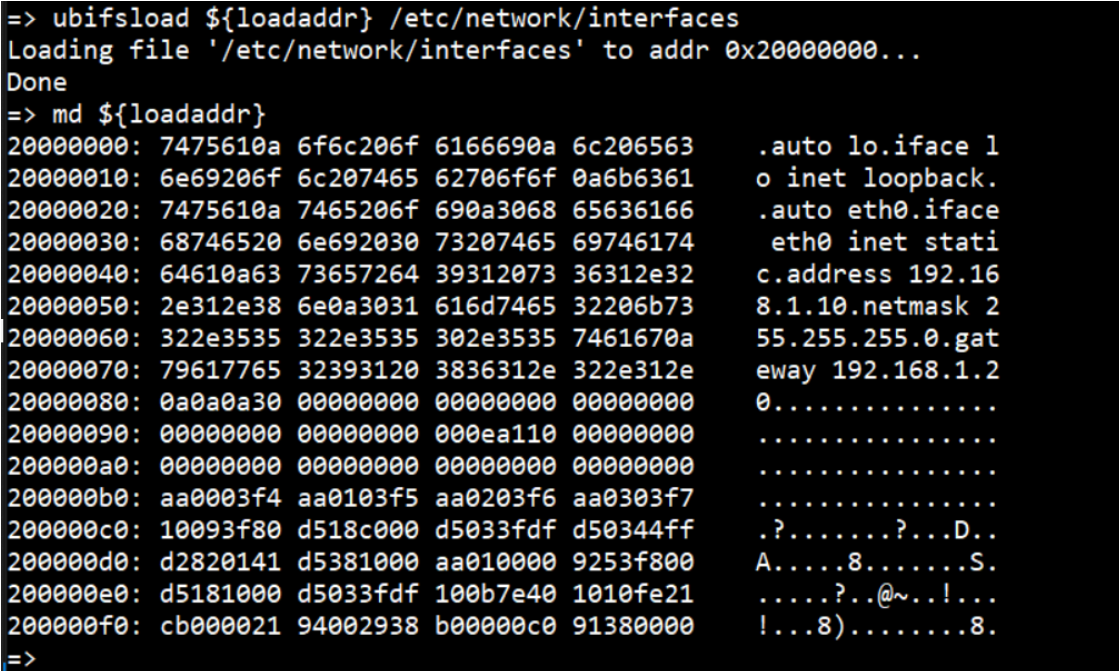
uboot下读取ubifs分区的方法
在uboot 的defconfig中增加以下内容: CONFIG_MTDIDS_DEFAULT"nand0nand0" CONFIG_MTDPARTS_DEFAULT"mtdpartsnand0:1M(boot1),1M(boot2),1M(hwinfo),6M(kernel1),6M(kernel2),56M(rootfs1),56M(rootfs2),-(ubi2)" CONFIG_CMD_UBIy 其中&#x…...
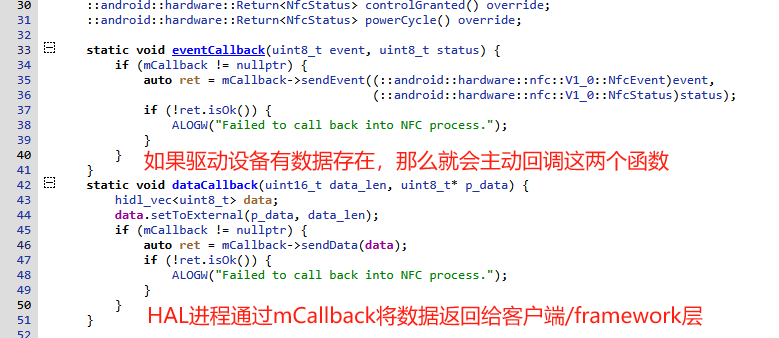
HAL详解
一、直通式HAL 这里使用一个案例来介绍直通式HAL,选择MTK的NFC HIDL 1.0为例,因为比较简单,代码量也比较小,其源码路径:vendor/hardware/interfaces/nfc/1.0/ 1、NFC HAL的定义 1)NFC HAL数据类型 通常定…...
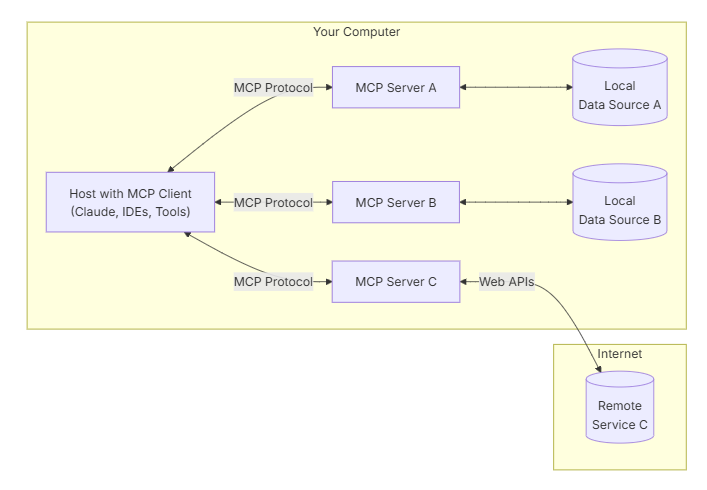
MCP(模型上下文协议)说明
背景 MCP(Model Context Protocol,模型上下文协议)旨在解决大型语言模型(LLM)与外部数据源及工具集成的问题。由Anthropic公司于2024年11月提出并开源,目标是实现AI模型与现有系统的无缝集成。 解决的问题…...

AI当前状态:有哪些新技术
一、到目前为址AI领域出现的新技术 到目前为止,AI领域涌现了许多令人兴奋的新技术。以下是一些关键的进展,涵盖了从基础模型到实际应用的多个方面: 1. 更强大的大型语言模型 (LLMs): 性能提升: 新一代LLM,例如OpenAI的GPT-4o和…...

如何校验一个字符串是否是可以正确序列化的JSON字符串呢?
方法1:先给一个比较暴力的方法 try {JSONObject o new JSONObject(yourString); } catch (JSONException e) {LOGGER.error("No valid json"); } 方法2: Object json new cn.hutool.json.JSONTokener("[{\"name\":\"t…...

orcad csi 17.4 DRC规则设置及检查
rCAD绘制完原理图之后总是需要开启DRC检测,但是DRC一般都是英文版的,下面基于Cadence17.4 的orCAD16.6 对DRC的界面做简单的介绍 首先,鼠标点击原理图,然后再点击右上方的小勾图标 desine rules check option选项的界面 电气规…...

k8s教程3:Kubernetes应用的部署和管理
学习目标 理解Kubernetes中应用部署的基本概念和方法掌握Deployment、ReplicaSet、StatefulSet、DaemonSet、Job与CronJob等控制器的使用了解Helm作为Kubernetes的包管理工具的基本使用通过实际示例学习应用的部署、更新与管理 Kubernetes提供了一套强大而灵活的机制ÿ…...

微信小程序获得当前城市,获得当前天气
// // 获取用户当前所在城市 // wx.getLocation({// type: wgs84, // 默认为 wgs84 返回 gps 坐标,gcj02 返回可用于 wx.openLocation 的坐标 // success: function(res) {// console.log(获取位置成功, res); // // 使用腾讯地图API进行逆地址解析 // wx…...

磁流变式汽车减振器创新设计与关键技术研究
摘要 本文针对智能悬架系统的发展需求,深入探讨磁流变减振器(MR Damper)的核心设计原理与工程实现路径。通过建立磁场-流场耦合模型,优化磁路结构与控制策略,提出具有快速响应特性的新型磁流变减振器设计方案…...

Python3.14都有什么重要新特性
目录 1、语法糖新宠:模式匹配再进化 1.1 结构化数据克星 1.2 类型守卫(Type Guard) 2、性能黑科技:尾递归与异步双杀 2.1 尾调用优化(TCO) 2.2 异步任务重构 3、注释系统重构:annotationlib深度解析 3.1 延迟评估机制 3.2 类型推导增…...

前端资源加载失败后重试加载(CSS,JS等引用资源)
前端资源加载失败后的重试 .前端引用资源时出现了资源加载失败(这里针对的是路径引用异常或者url解析错误时) 解决这个问题首先要明确一下几个步骤 1.什么情况或者什么时候重试 2.如何重试 3.重试过程中的边界处理 这里引入里三个测试脚本,分别加载里三个不同的脚…...
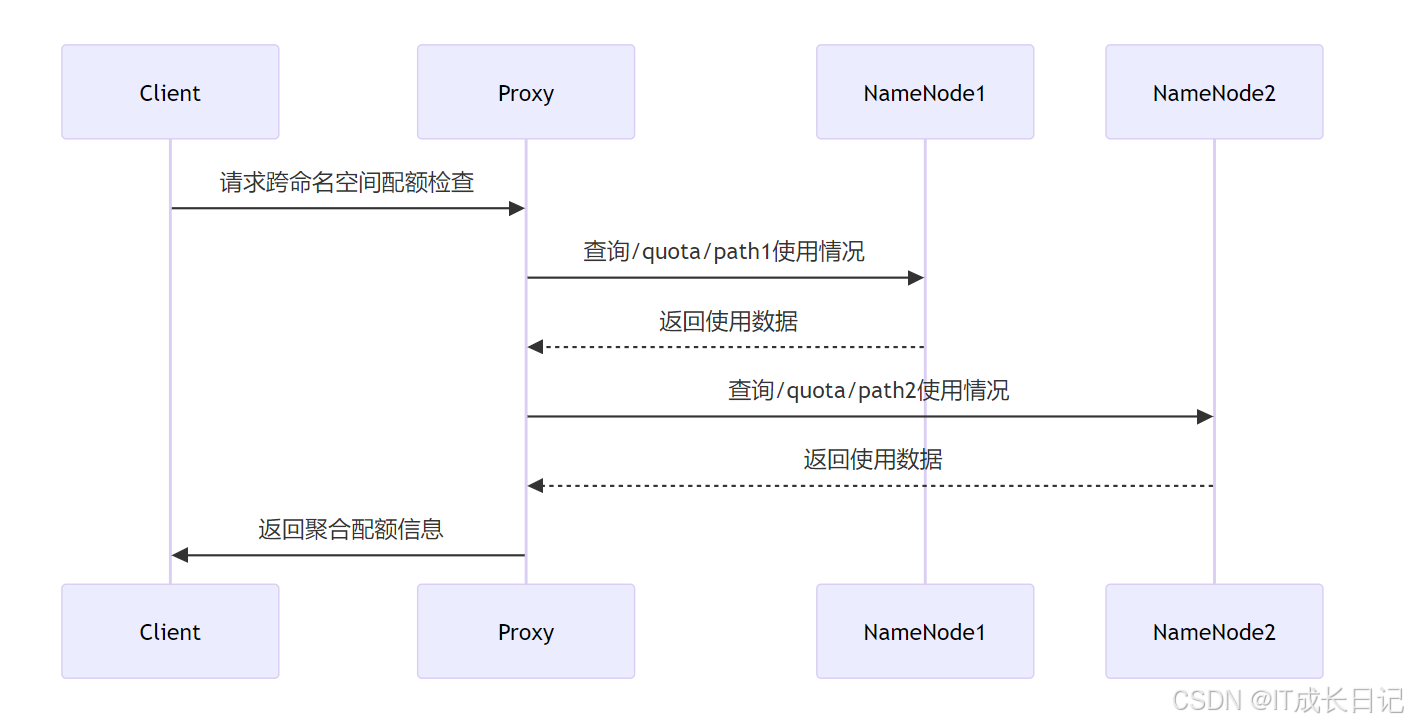
【HDFS入门】联邦机制(Federation)与扩展性:HDFS NameNode水平扩展深度解析
目录 引言 1 NameNode水平扩展原理 1.1 传统HDFS架构的局限性 1.2 联邦机制的基本原理 1.3 联邦架构的关键组件 2 多个Namespace的路由规则配置 2.1 客户端挂载表概念 2.2 挂载表配置示例 2.3 挂载表匹配规则 2.4 配置示例 3 BlockPool与Namespace的映射关系 3.1 B…...

C#学习第16天:聊聊反射
什么是反射? 定义:反射是一种机制,允许程序在运行时获取关于自身的信息,并且可以动态调用方法、访问属性或创建实例。用途:常用于框架设计、工具开发、序列化、代码分析和测试等场景 反射的核心概念 1. 获取类型信息…...

论文阅读:2024 arxiv AI Safety in Generative AI Large Language Models: A Survey
总目录 大模型安全相关研究:https://blog.csdn.net/WhiffeYF/article/details/142132328 AI Safety in Generative AI Large Language Models: A Survey https://arxiv.org/pdf/2407.18369 https://www.doubao.com/chat/3262156521106434 速览 研究动机&#x…...