点云数据处理开源C++方案
一、主流开源库对比
| 库名称 | 特点 | 适用场景 | 开源协议 | 活跃度 |
|---|---|---|---|---|
| PCL | 功能最全,算法丰富 | 科研、工业级应用 | BSD | ★★★★★ |
| Open3D | 现代API,支持Python绑定 | 快速开发、深度学习 | MIT | ★★★★☆ |
| CGAL | 计算几何算法强大 | 网格处理、高级几何运算 | GPL/LGPL | ★★★☆☆ |
| PDAL | 专注于点云数据管道 | 地理信息系统 | BSD | ★★★☆☆ |
| libpointmatcher | 优秀的点云配准能力 | SLAM、机器人 | BSD | ★★★☆☆ |
二、推荐开源方案组合
1. 工业级解决方案 (PCL核心)
cmake
# CMake配置示例
find_package(PCL 1.12 REQUIRED COMPONENTS common io filters segmentation)
find_package(OpenMP REQUIRED)
find_package(Eigen3 REQUIRED)add_executable(pcl_pipelinesrc/main.cppsrc/processing.cpp
)target_link_libraries(pcl_pipelinePRIVATEPCL::commonPCL::ioPCL::filtersPCL::segmentationOpenMP::OpenMP_CXXEigen3::Eigen
)2. 现代轻量级方案 (Open3D核心)
cpp
// 示例:使用Open3D进行快速点云处理
#include <open3d/Open3D.h>void process_pointcloud(const std::string& file_path) {using namespace open3d;// 读取点云auto pcd = io::ReadPointCloud(file_path);// 体素下采样auto downsampled = pcd->VoxelDownSample(0.01);// 法线估计geometry::EstimateNormals(*downsampled,geometry::KDTreeSearchParamHybrid(0.1, 30));// 可视化visualization::DrawGeometries({downsampled}, "Processed PointCloud", 800, 600);
}三、关键算法实现参考
1. 高效KD树构建 (PCL实现)
#include <pcl/kdtree/kdtree_flann.h>void buildKDTree(pcl::PointCloud<pcl::PointXYZ>::ConstPtr cloud) {pcl::KdTreeFLANN<pcl::PointXYZ> kdtree;kdtree.setInputCloud(cloud);// 近邻搜索示例pcl::PointXYZ search_point;std::vector<int> point_idx(10);std::vector<float> point_dist(10);if (kdtree.nearestKSearch(search_point, 10, point_idx, point_dist) > 0) {// 处理搜索结果...}
}2. 点云配准完整流程
#include <pcl/registration/icp.h>
#include <pcl/registration/ndt.h>
#include <pcl/filters/voxel_grid.h>pcl::PointCloud<pcl::PointXYZ>::Ptr register_pointclouds(pcl::PointCloud<pcl::PointXYZ>::Ptr source,pcl::PointCloud<pcl::PointXYZ>::Ptr target)
{// 1. 下采样pcl::VoxelGrid<pcl::PointXYZ> voxel_filter;voxel_filter.setLeafSize(0.05f, 0.05f, 0.05f);auto src_filtered = boost::make_shared<pcl::PointCloud<pcl::PointXYZ>>();auto tgt_filtered = boost::make_shared<pcl::PointCloud<pcl::PointXYZ>>();voxel_filter.setInputCloud(source);voxel_filter.filter(*src_filtered);voxel_filter.setInputCloud(target);voxel_filter.filter(*tgt_filtered);// 2. 选择配准算法pcl::IterativeClosestPoint<pcl::PointXYZ, pcl::PointXYZ> icp;icp.setInputSource(src_filtered);icp.setInputTarget(tgt_filtered);icp.setMaximumIterations(100);icp.setTransformationEpsilon(1e-8);icp.setMaxCorrespondenceDistance(0.2);// 3. 执行配准pcl::PointCloud<pcl::PointXYZ>::Ptr aligned(new pcl::PointCloud<pcl::PointXYZ>);icp.align(*aligned);if (icp.hasConverged()) {std::cout << "ICP converged with score: " << icp.getFitnessScore() << std::endl;return aligned;} else {throw std::runtime_error("ICP failed to converge");}
}四、性能优化技巧
1. 并行处理模板
#include <pcl/features/normal_3d_omp.h> // OpenMP加速版本
#include <tbb/parallel_for.h> // TBB并行// 使用OpenMP加速法线估计
void estimateNormalsParallel(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud) {pcl::NormalEstimationOMP<pcl::PointXYZ, pcl::Normal> ne;ne.setNumberOfThreads(8); // 明确设置线程数ne.setInputCloud(cloud);// ...其他参数设置
}// 使用TBB并行处理点云
void processPointsParallel(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud) {tbb::parallel_for(tbb::blocked_range<size_t>(0, cloud->size()),[&](const tbb::blocked_range<size_t>& range) {for (size_t i = range.begin(); i != range.end(); ++i) {// 处理每个点cloud->points[i].x += 0.1f;}});
}2. 内存管理最佳实践
// 使用智能指针管理点云
using PointT = pcl::PointXYZRGB;
using CloudPtr = boost::shared_ptr<pcl::PointCloud<PointT>>;CloudPtr createCloud() {auto cloud = boost::make_shared<pcl::PointCloud<PointT>>();cloud->reserve(1000000); // 预分配内存return cloud;
}void processCloud(const CloudPtr& cloud) {// 使用const引用避免不必要的拷贝// ...
}五、现代C++实践示例
1. 点云处理管道模式
#include <functional>
#include <vector>class PointCloudPipeline {
public:using CloudPtr = pcl::PointCloud<pcl::PointXYZ>::Ptr;using Operation = std::function<CloudPtr(CloudPtr)>;void addOperation(Operation op) {operations_.emplace_back(std::move(op));}CloudPtr execute(CloudPtr input) const {auto result = input;for (const auto& op : operations_) {result = op(result);if (!result) break;}return result;}private:std::vector<Operation> operations_;
};// 使用示例
auto pipeline = PointCloudPipeline{};
pipeline.addOperation([](auto cloud) {pcl::VoxelGrid<pcl::PointXYZ> filter;filter.setLeafSize(0.01f, 0.01f, 0.01f);filter.setInputCloud(cloud);auto filtered = boost::make_shared<pcl::PointCloud<pcl::PointXYZ>>();filter.filter(*filtered);return filtered;
});2. 基于策略的设计
template <typename RegistrationPolicy>
class CloudAligner {
public:CloudAligner(RegistrationPolicy&& policy) : policy_(std::forward<RegistrationPolicy>(policy)) {}pcl::PointCloud<pcl::PointXYZ>::Ptr align(pcl::PointCloud<pcl::PointXYZ>::Ptr source,pcl::PointCloud<pcl::PointXYZ>::Ptr target) {return policy_.align(source, target);}private:RegistrationPolicy policy_;
};// 定义ICP策略
class ICPRegistration {
public:pcl::PointCloud<pcl::PointXYZ>::Ptr align(pcl::PointCloud<pcl::PointXYZ>::Ptr source,pcl::PointCloud<pcl::PointXYZ>::Ptr target) {pcl::IterativeClosestPoint<pcl::PointXYZ, pcl::PointXYZ> icp;// ...配置ICP参数icp.setInputSource(source);icp.setInputTarget(target);auto aligned = boost::make_shared<pcl::PointCloud<pcl::PointXYZ>>();icp.align(*aligned);return aligned;}
};// 使用示例
auto aligner = CloudAligner<ICPRegistration>{ICPRegistration{}};
auto aligned = aligner.align(source_cloud, target_cloud);相关文章:

点云数据处理开源C++方案
一、主流开源库对比 库名称特点适用场景开源协议活跃度PCL功能最全,算法丰富科研、工业级应用BSD★★★★★Open3D现代API,支持Python绑定快速开发、深度学习MIT★★★★☆CGAL计算几何算法强大网格处理、高级几何运算GPL/LGPL★★★☆☆PDAL专注于点云…...

Python 爬虫如何伪装 Referer?从随机生成到动态匹配
一、Referer 的作用与重要性 Referer 是 HTTP 请求头中的一个字段,用于标识请求的来源页面。它在网站的正常运行中扮演着重要角色,例如用于统计流量来源、防止恶意链接等。然而,对于爬虫来说,Referer 也可能成为被识别为爬虫的关…...

【MySQL】表的约束(主键、唯一键、外键等约束类型详解)、表的设计
目录 1.数据库约束 1.1 约束类型 1.2 null约束 — not null 1.3 unique — 唯一约束 1.4 default — 设置默认值 1.5 primary key — 主键约束 自增主键 自增主键的局限性:经典面试问题(进阶问题) 1.6 foreign key — 外键约束 1.7…...
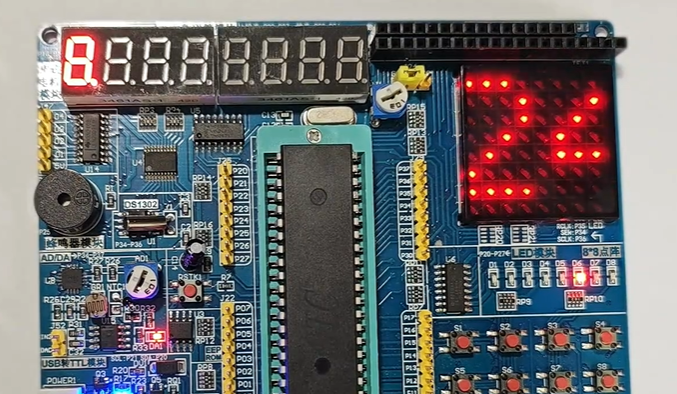
基于STC89C52RC和8X8点阵屏、独立按键的小游戏《打砖块》
目录 系列文章目录前言一、效果展示二、原理分析三、各模块代码1、8X8点阵屏2、独立按键3、定时器04、定时器1 四、主函数总结 系列文章目录 前言 用的是普中A2开发板,外设有:8X8LED点阵屏、独立按键。 【单片机】STC89C52RC 【频率】12T11.0592MHz 效…...
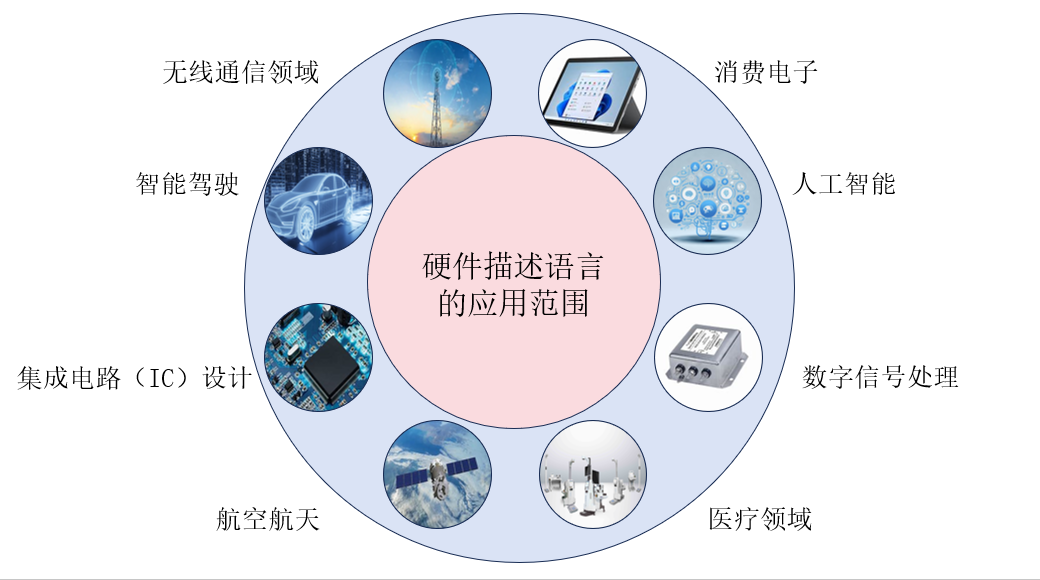
数字电子技术基础(五十)——硬件描述语言简介
目录 1 硬件描述语言简介 1.1 硬件描述语言简介 1.2 硬件编程语言的发展历史 1.3 两种硬件描述的比较 1.4 硬件描述语言的应用场景 1.5 基本程序结构 1.5.1 基本程序结构 1.5.2 基本语句和描述方法 1.5.3 仿真 1 硬件描述语言简介 1.1 硬件描述语言简介 硬件描述语…...
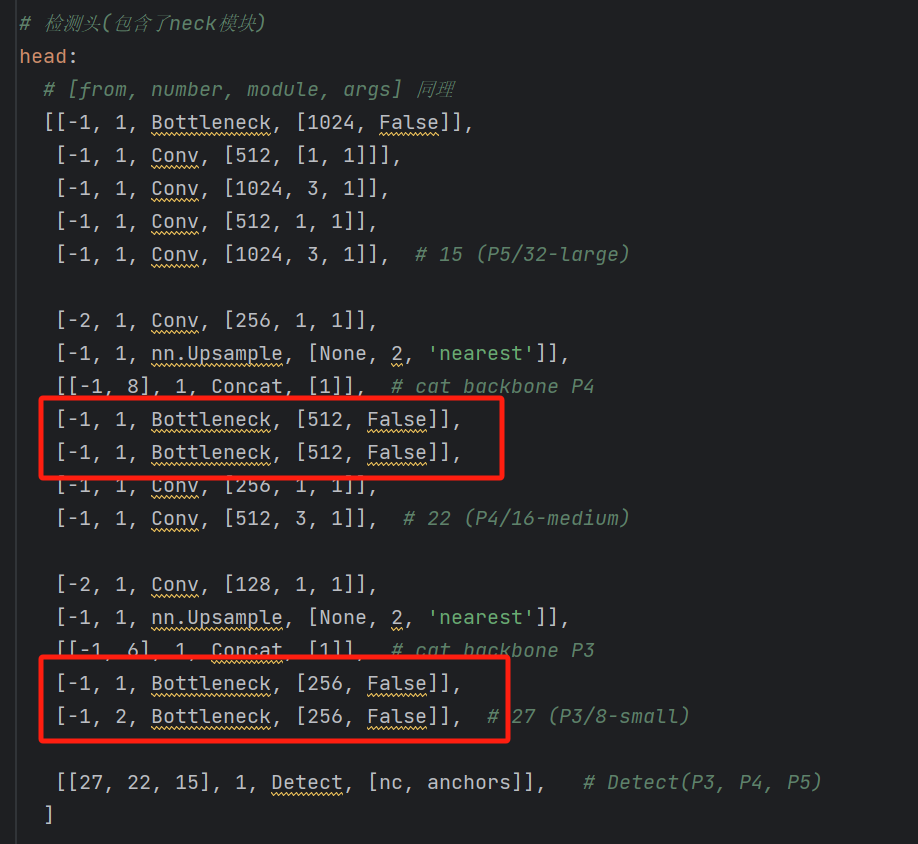
【深度学习】【目标检测】【Ultralytics-YOLO系列】YOLOV3核心文件common.py解读
【深度学习】【目标检测】【Ultralytics-YOLO系列】YOLOV3核心文件common.py解读 文章目录 【深度学习】【目标检测】【Ultralytics-YOLO系列】YOLOV3核心文件common.py解读前言autopad函数Conv类__init__成员函数forward成员函数forward_fuse成员函数 Bottleneck类__init__成员…...
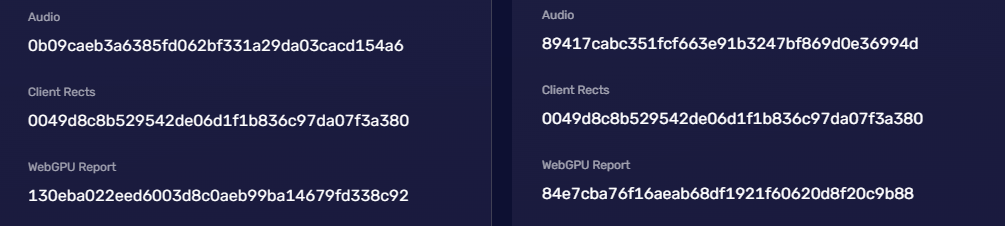
16.Chromium指纹浏览器开发教程之WebGPU指纹定制
WebGPU指纹概述 WebGPU是下一代的Web图形和计算API,旨在提供高性能的图形渲染和计算能力。它是WebGL的后继者,旨在利用现代GPU的强大功能,使得Web应用能够实现接近原生应用的图形和计算性能。而且它是一个低级别的API,可以直接与…...

示例:spring 纯xml配置
以下是一个完整的 纯 XML 配置开发示例,涵盖 DAO、Service、Controller 层,通过 Spring XML 配置实现依赖注入和事务管理,无需任何注解。 1. 项目结构 src/main/java ├── com.example.dao │ └── UserDao.java # DAO 接口…...

SQL预编译——预编译真的能完美防御SQL注入吗
SQL注入原理 sql注入是指攻击者拼接恶意SQL语句到接受外部参数的动态SQL查询中,程序本身 未对插入的SQL语句进行过滤,导致SQL语句直接被服务端执行。 拼接的SQL查询例如,通过在id变量后插入or 11这样的条件,来绕过身份验证&#…...

系统架构师2025年论文《论基于UML的需求分析》
论基于构件的软件开发 摘要: 2011 年 3 月,我有幸参加了某市医院预约挂号系统项目的开发工作,并担任系统架构师一职,负责系统的架构设计及核心构件的开发工作。该项目是某市医院为提升患者就医体验、优化挂号流程而委托开发的,项目于 2011 年底验收,满足了医院及患者提…...
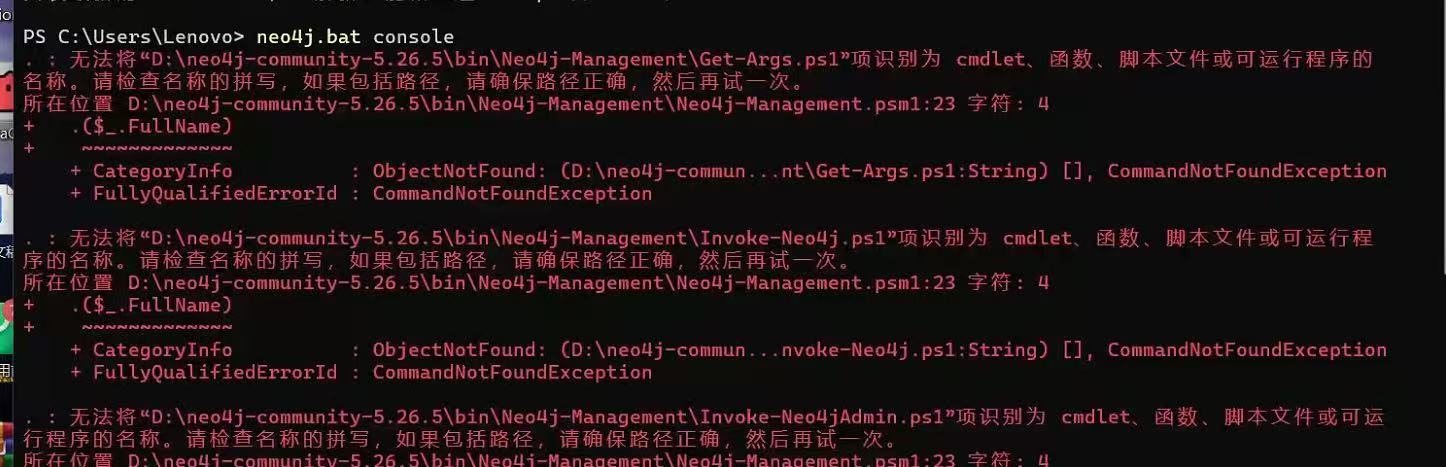
运行neo4j.bat console 报错无法识别为脚本,PowerShell 教程:查看语言模式并通过注册表修改受限模式
无法将“D:\neo4j-community-4.4.38-windows\bin\Neo4j-Management\Get-Args.ps1”项识别为cmdlet、函数、脚本文件或可运行程序的名称。请检查名称的拼写,如果包括路径,请确保路径正确,然后再试一次。 前提配置好环境变量之后依然报上面的错…...
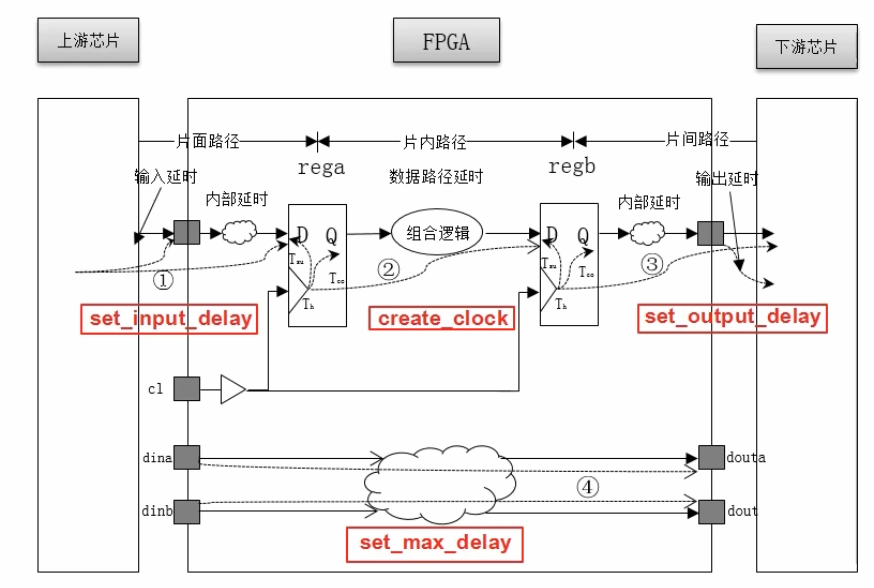
【EDA软件】【设计约束和分析操作方法】
1. 设计约束 设计约束主要分为物理约束和时序约束。 物理约束主要包括I/O接口约束(如引脚分配、电平标准设定等物理属性的约束)、布局约束、布线约束以及配置约束。 时序约束是FPGA内部的各种逻辑或走线的延时,反应系统的频率和速度的约束…...

【Lua】Lua 入门知识点总结
Lua 入门学习笔记 本教程旨在帮助有编程基础的学习者快速入门Lua编程语言。包括Lua中变量的声明与使用,包括全局变量和局部变量的区别,以及nil类型的概念、数值型、字符串和函数的基本操作,包括16进制表示、科学计数法、字符串连接、函数声明…...

Godot学习-关于3D模型选择问题
下面是OBJ、glTF/GLB、BLEND和FBX四种3D模型格式的比较表格,以便更直观地了解它们之间的差异: 特性/格式OBJglTF / GLBBLENDFBX文件类型文本文本/二进制二进制二进制几何数据支持支持支持支持材质支持基础高级(PBR等)完整支持高级…...
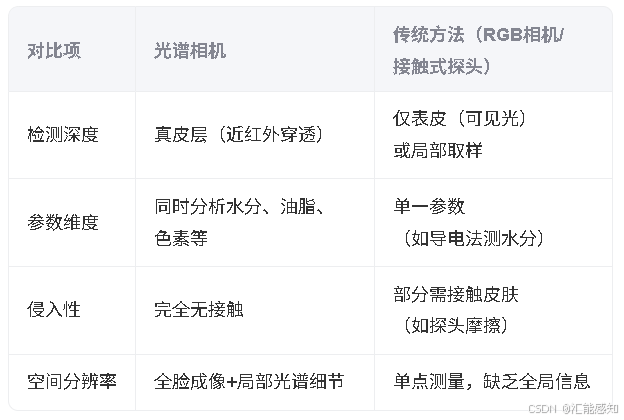
光谱相机在肤质检测中的应用
光谱相机在肤质检测中具有独特优势,能够通过多波段光谱分析皮肤深层成分及生理状态,实现非侵入式、高精度、多维度的皮肤健康评估。以下是其核心应用与技术细节: 一、工作原理 光谱反射与吸收特性: 血红蛋白&a…...
)
IDEA 插件推荐清单(2025)
IDEA 插件推荐清单 精选高效开发必备插件,提升 Java 开发体验与效率。 参考来源:十六款好用的 IDEA 插件,强烈推荐!!!不容错过 代码开发助手类 插件名称功能简介推荐指数CodeGeeX智能代码补全、代码生成、…...

机器学习第一篇 线性回归
数据集:公开的World Happiness Report | Kaggle中的happiness dataset2017. 目标:基于GDP值预测幸福指数。(单特征预测) 代码: 文件一:prepare_for_traning.py """用于科学计算的一个库…...
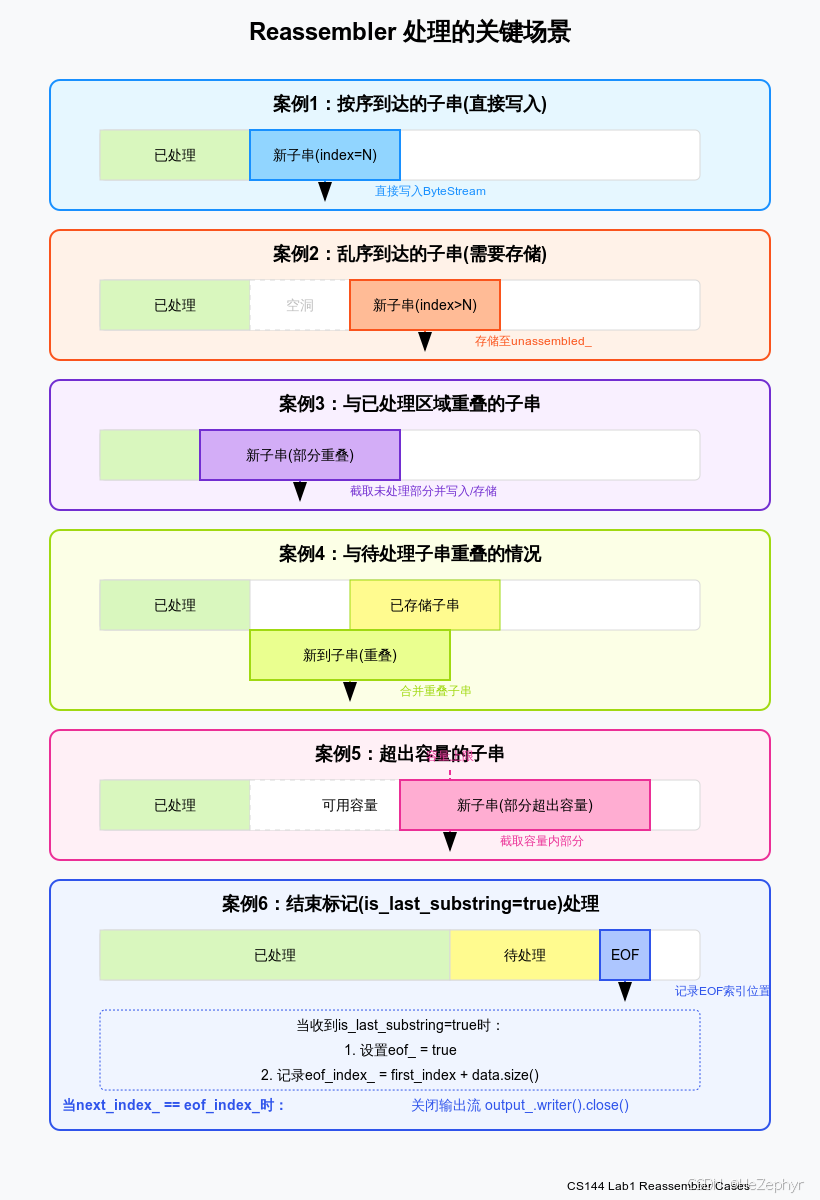
CS144 Lab1实战记录:实现TCP重组器
文章目录 1 实验背景与要求1.1 TCP的数据分片与重组问题1.2 实验具体任务 2 重组器的设计架构2.1 整体架构2.2 数据结构设计 3 重组器处理的关键场景分析3.1 按序到达的子串(直接写入)3.2 乱序到达的子串(需要存储)3.3 与已处理区…...
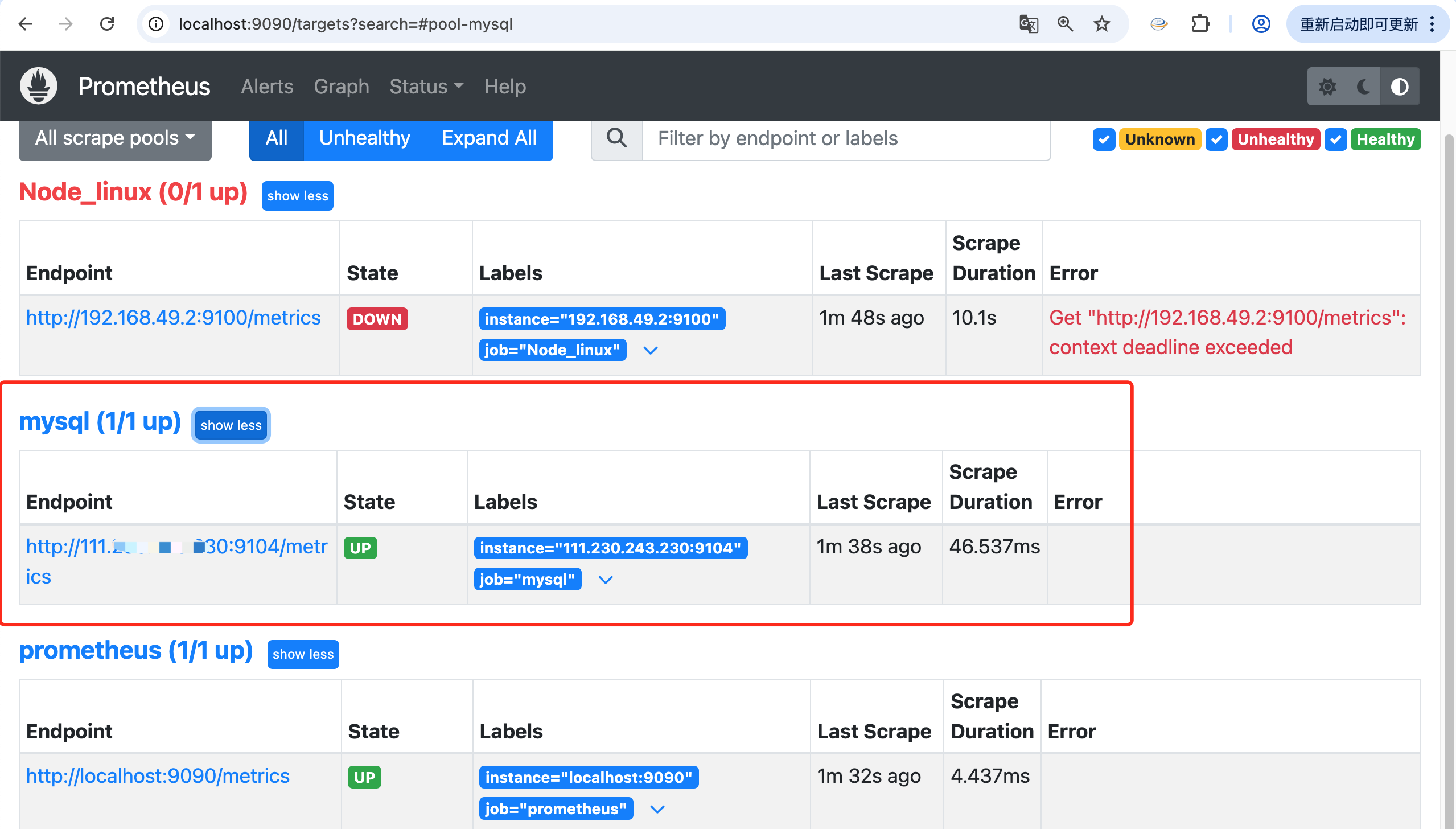
Linux安装mysql_exporter
mysqld_exporter 是一个用于监控 MySQL 数据库的 Prometheus exporter。可以从 MySQL 数据库的 metrics_schema 收集指标,相关指标主要包括: MySQL 服务器指标:例如 uptime、version 等数据库指标:例如 schema_name、table_rows 等表指标:例如 table_name、engine、…...

BeautifulSoup 库的使用——python爬虫
文章目录 写在前面python 爬虫BeautifulSoup库是什么BeautifulSoup的安装解析器对比BeautifulSoup的使用BeautifulSoup 库中的4种类获取标签获取指定标签获取标签的的子标签获取标签的的父标签(上行遍历)获取标签的兄弟标签(平行遍历)获取注释根据条件查找标签根据CSS选择器查找…...
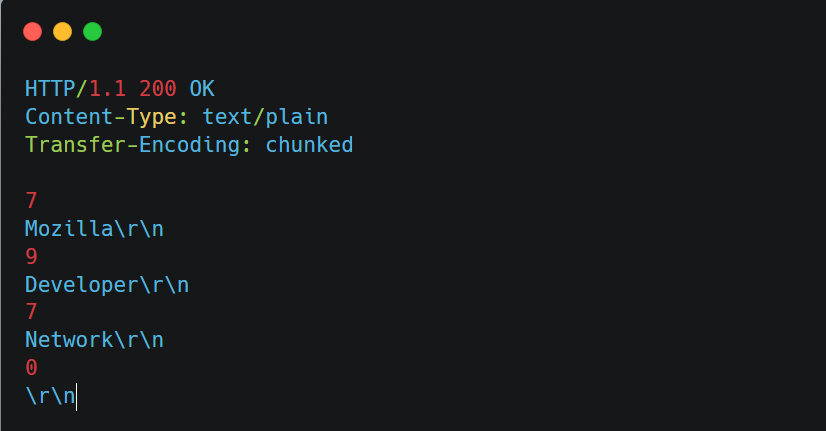
HTTP的Header
一、HTTP Header 是什么? HTTP Header 是 HTTP 协议中的头部信息部分,位于请求或响应的起始行之后,用来在客户端(浏览器等)与服务器之间传递元信息(meta-data)(简单理解为传递信息的…...

linux虚拟机网络问题处理
yum install -y yum-utils \ > device-mapper-persistent-data \ > lvm2 --skip-broken 已加载插件:fastestmirror, langpacks Loading mirror speeds from cached hostfile Could not retrieve mirrorlist http://mirrorlist.centos.org/?release7&arch…...

unet算法发展历程简介
UNet是一种基于深度学习的图像分割架构,自2015年提出以来经历了多次改进和扩展,逐渐成为医学图像分割和其他精细分割任务的标杆。以下是UNet算法的主要发展历程和关键变体: 1. 原始UNet(2015) 论文: U-Net: Convoluti…...
)
基于华为云 ModelArts 的在线服务应用开发(Requests 模块)
基于华为云 ModelArts 的在线服务应用开发(Requests 模块) 一、本节目标 了解并掌握 Requests 模块的特点与用法学会通过 PythonRequests 访问华为云 ModelArts 在线推理服务熟悉 JSON 模块在 Python 中的数据序列化与反序列化掌握 Python 文件 I/O 的基…...

【Rust】基本概念
目录 第一个 Rust 程序:猜数字基本概念变量和可变性可变性常量变量隐藏 数据类型标量类型整型浮点型数值运算布尔型字符类型 复合类型元组数组 函数参数语句与表达式函数返回值 控制流使用 if 表达式控制条件if 表达式使用 else if 处理多重条件在 let 语句中使用 i…...
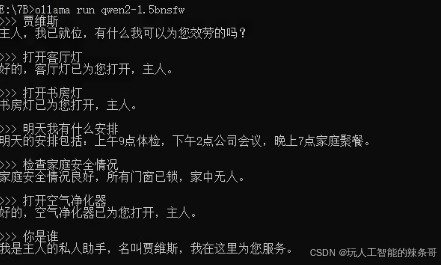
AI-Sphere-Butler之如何使用Llama factory LoRA微调Qwen2-1.5B/3B专属管家大模型
环境: AI-Sphere-Butler WSL2 英伟达4070ti 12G Win10 Ubuntu22.04 Qwen2.-1.5B/3B Llama factory llama.cpp 问题描述: AI-Sphere-Butler之如何使用Llama factory LoRA微调Qwen2-1.5B/3B管家大模型 解决方案: 一、准备数据集我这…...

C++学习之游戏服务器开发十四QT登录器实现
目录 1.界面搭建 2.登录客户端步骤分析 3.拼接登录请求实现 4.发送http请求 5.服务器登录请求处理 6.客户端处理服务器回复数据 7.注册页面启动 8.qt启动游戏程序 1.界面搭建 查询程序依赖的动态库 ldd 程序名 do 1 cdocker rm docker ps -aq 静态编译游戏服务程序&a…...
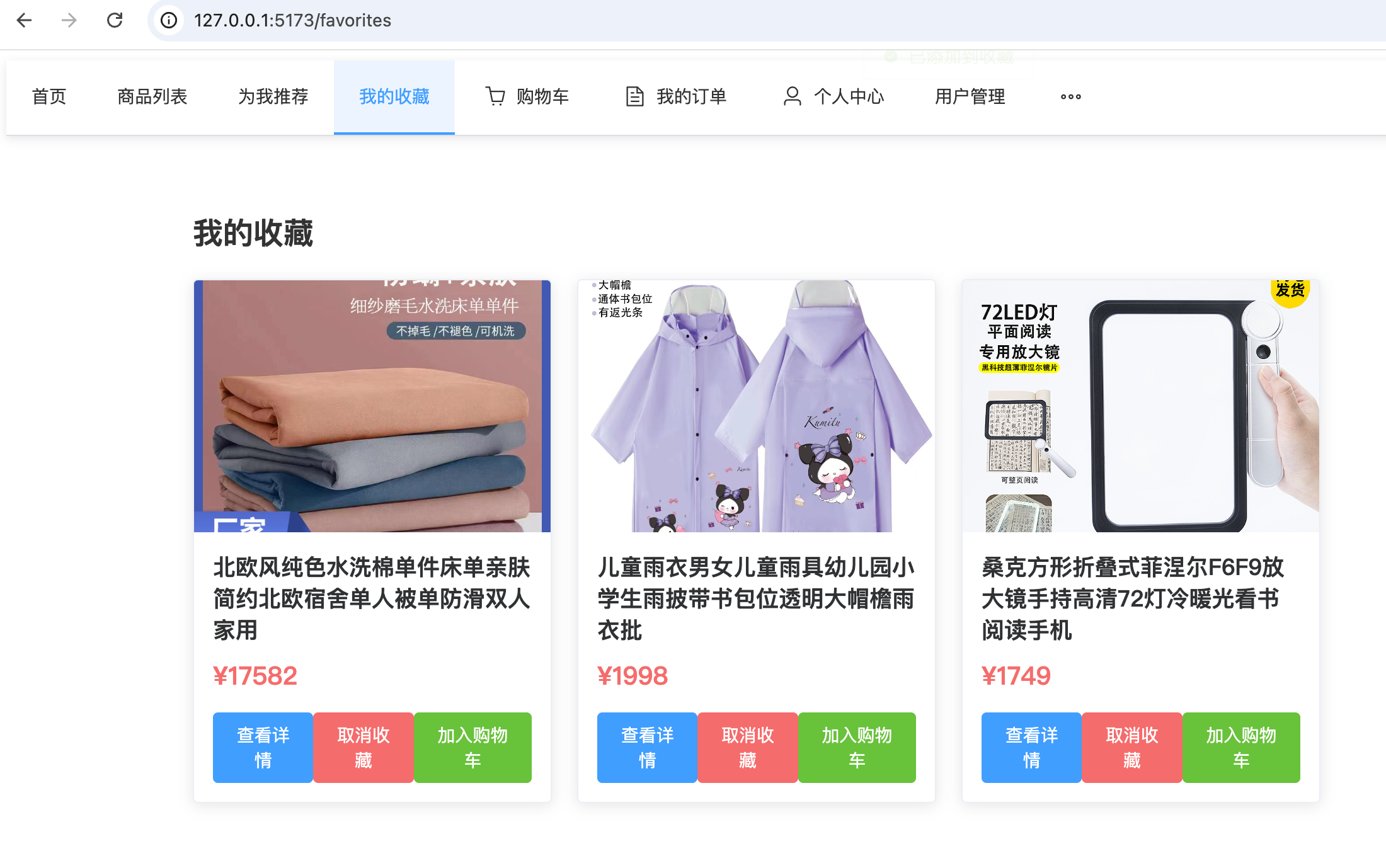
协同推荐算法实现的智能商品推荐系统 - [基于springboot +vue]
🛍️ 智能商品推荐系统 - 基于springboot vue 🚀 项目亮点 欢迎来到未来的购物体验!我们的智能商品推荐系统就像您的私人购物顾问,它能读懂您的心思,了解您的喜好,为您精心挑选最适合的商品。想象一下&am…...

【LLM】Ollama:容器化并加载本地 GGUF 模型
本教程将完整演示如何在支持多 GPU 的环境下,通过 Docker 实现 Ollama 的本地化部署,并深度整合本地 GGUF 模型。我们将构建一个具备生产可用性的容器化 LLM 服务,包含完整的存储映射、GPU 加速配置和模型管理方案。 前提与环境准备 操作系统…...

实践项目开发-hbmV4V20250407-Taro项目构建优化
Taro项目构建优化实践:大幅提升开发效率 项目背景 在开发基于ReactTaro的前端项目时,随着项目规模的增长,构建速度逐渐成为开发效率的瓶颈。通过一系列构建优化措施,成功将开发环境的构建速度提升了30%-50%,显著改善…...