计算机视觉——速度与精度的完美结合的实时目标检测算法RF-DETR详解
概述
目标检测已经取得了长足的发展,尤其是随着基于 Transformer 的模型的兴起。RF-DETR,由 Roboflow 开发,就是这样一种模型,它兼顾了速度和精度。使用 Roboflow 的工具可以让整个过程变得更加轻松。他们的平台涵盖了从上传和标注数据到以正确格式导出数据的全过程。这意味着你可以节省设置的时间,将更多的时间用于训练和改进模型。
一、 模型变体、性能和基准测试
RF-DETR 是由 Roboflow 开发并以 Apache 2.0 许可证发布的实时、基于 Transformer 的目标检测模型架构。
RF-DETR 在微软 COCO 基准测试中可以超过 60 AP(平均精度),并且在基础尺寸下具有竞争力的性能。它还在 RF100-VL 目标检测基准测试中达到了最先进的性能,该基准测试衡量模型对现实问题的领域适应性。RF-DETR 的速度与当前的实时目标检测模型相当。
RF-DETR 提供两种模型尺寸:RF-DETR-Base(29M 参数)和 RF-DETR-large(128M 参数)。基础版本最适合快速推理,而大型版本最适合最准确的预测,但其计算时间比基础版本更长。
RF-DETR 足够小,可以在边缘设备上运行,使其非常适合需要强大精度和实时性能的部署。
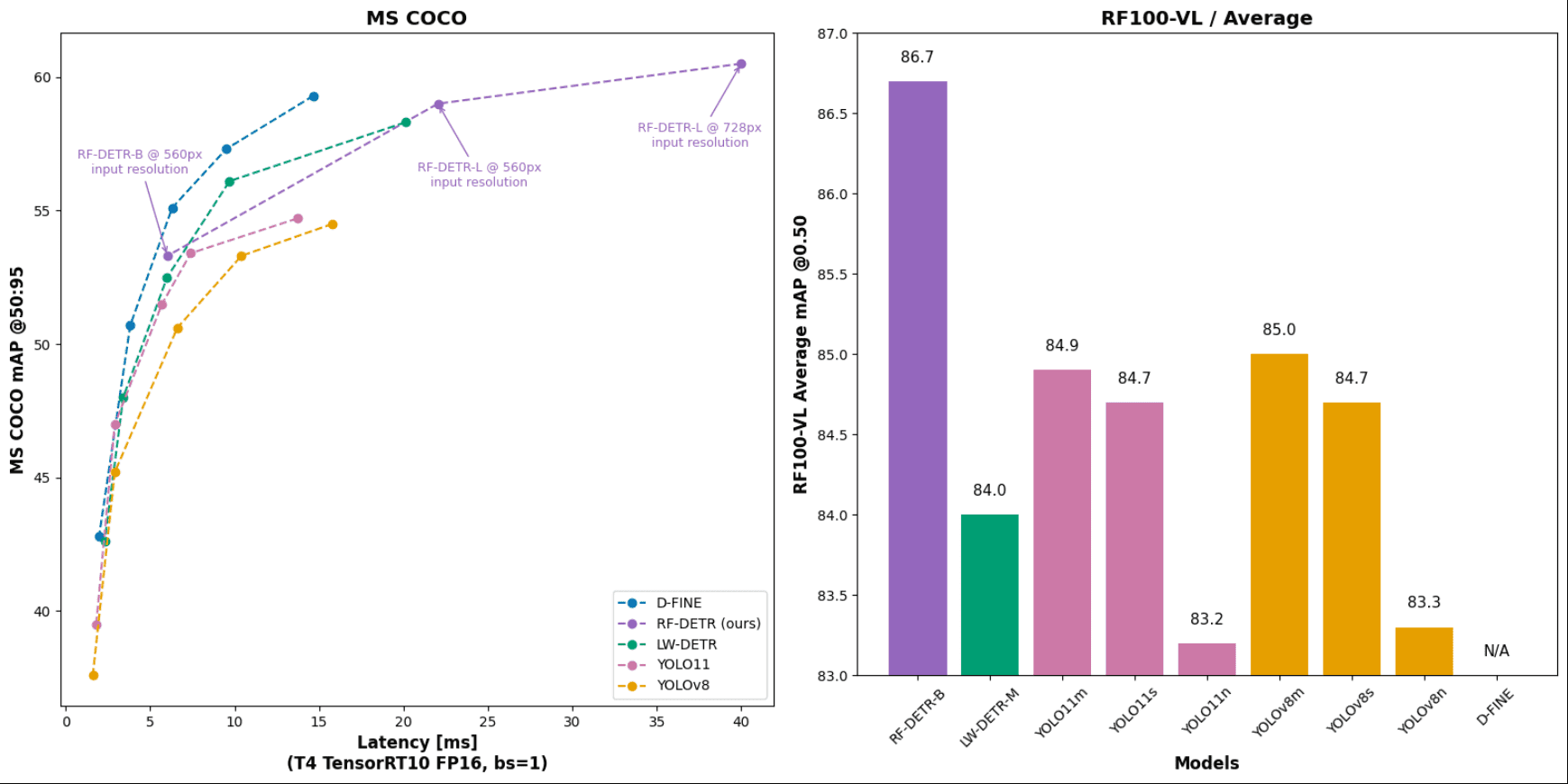
RF-DETR 在 coco 和 RF100 VL 基准测试中的性能
| 模型 | 参数量 (M) | mAP(coco) @0.50:0.95 | mAP(rf100-vl) 平均 @0.50 | mAP(rf100-vl) 平均 @0.50:0.95 | 总延迟(ms) T4, bs = 1 |
| D-FINE-M | 19.3 | 55.1 | N/A | N/A | 6.3 |
| LW-DETR-M | 28.3 | 52.5 | 84.0 | 57.5 | 6.0 |
| YOLO11m | 20.0 | 51.5 | 84.9 | 59.7 | 5.7 |
| YOLOv8m | 28.9 | 50.6 | 85.0 | 59.8 | 6.3 |
| RF-DETR-B | 29.0 | 53.3 | 86.7 | 60.3 | 6.0 |
二、 架构概览
CNN 仍然是许多最佳实时目标检测方法的核心组件,包括像 D-FINE 这样利用 CNN 和 Transformer 的模型。
最近,随着 2023 年 RT-DETR 的推出,DETR 系列模型通过 Transformer 架构在端到端目标检测任务中展示了可比甚至超越的结果,消除了 Faster-RCNN 等框架中标准的手动设计组件,如锚点生成和非最大抑制(NMS)。
尽管 DETR 模型具有优势,但它存在两个显著的局限性:
- 收敛速度慢
- 对小目标的检测性能差
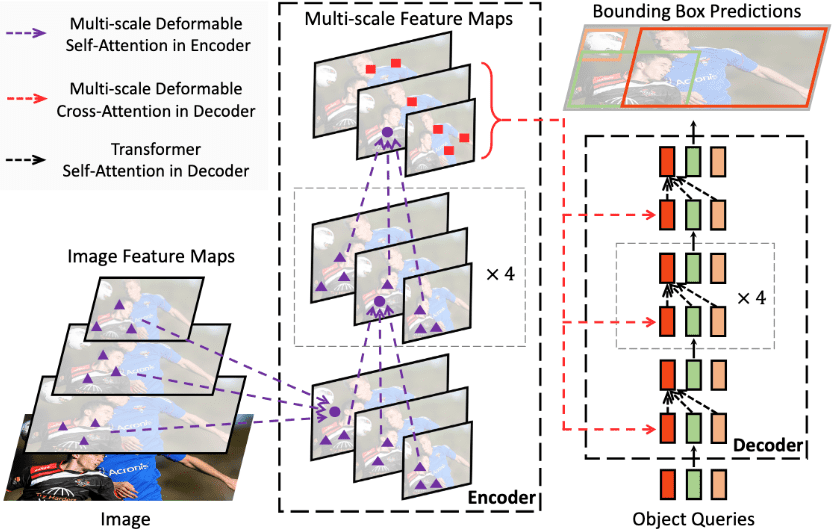
Deformable DETR,RF-DETR 基于此架构构建。
RF-DETR 使用基于 Deformable DETR 模型的架构来弥补上述局限性。然而,与使用多尺度自注意力机制的 Deformable DETR 不同,RF-DETR 从单尺度主干中提取图像特征图。
RF-DETR 结合了 LW-DETR 和预训练的 DINOv2 主干。利用 DINOv2 预训练主干提供了出色的适应新领域的能力,基于预训练模型中存储的知识。
让我们来审视一下 LW-DETR 架构的细节,RF-DETR 采用了与之相同的架构以及 DINOv2。DINOv2 的架构细节超出了本文的范围。对于那些有兴趣了解 DINOv2 的理念和架构的人,可以访问我们的文章,其中涵盖了论文解释和道路分割实现。
LW-DETR
LW-DETR 的架构由一个简单的 ViT 编码器堆叠、一个投影器和一个浅层 DETR 解码器组成。它探索了纯 ViT 主干和 DETR 框架在实时检测中的可行性。
编码器:
论文的作者使用了普通的 ViT 作为检测编码器。一个普通的 ViT 包括一个分块层和 Transformer 编码器层。初始 ViT 中的 Transformer 编码器层包含一个对所有标记进行全局自注意力的层和一个 FFN 层。全局自注意力的计算成本很高,其时间复杂度与标记数量的平方成正比。
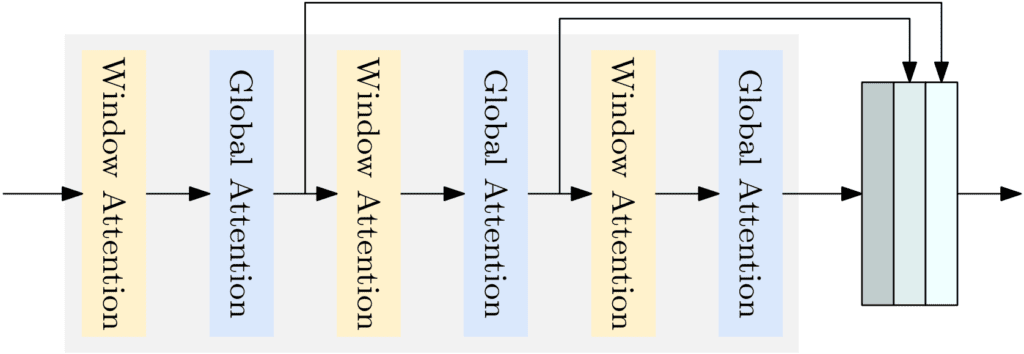
ViT 编码器
因此,作者引入了窗口自注意力来降低计算复杂度;他们还提出了聚合编码器中的多级特征图,形成更强的编码特征图。
解码器:
解码器是 Transformer 解码器层的堆叠。每一层都包含自注意力、交叉注意力和 FFN。我们采用可变形交叉注意力以提高计算效率。DETR 及其变体通常采用六个解码器层。然而,作者解释说,只使用三个 Transformer 解码器层可以使时间从 1.4 ms 减少到 0.7 ms,与他们方法中剩余部分的 1.3 ms 时间成本相比,这是一个显著的减少。
他们采用了混合查询选择方案来形成对象查询,除了内容查询和空间查询之外。内容查询是可学习的嵌入,类似于 DETR。空间查询基于一个两阶段方案:从 Projector 的最后一层中选择顶部 K 个特征,预测边界框,并将相应的框转换为嵌入作为空间查询。
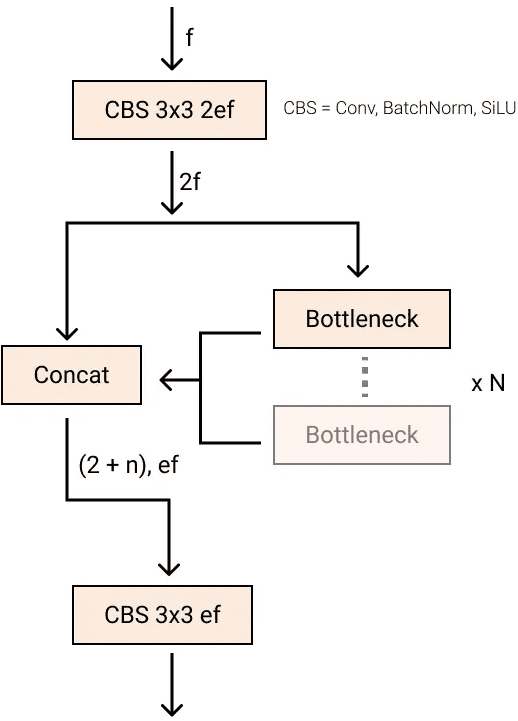
C2f 块(来自 YOLOv8)
投影器:
投影器连接编码器和解码器。它以编码器的聚合编码特征图为输入。投影器是一个在 YOLOv8 中实现的 C2f 块。
对于 LW-DETR 的大版本和特大版本,投影器被修改为输出两尺度特征图,并相应地使用多尺度解码器。投影器包含两个并行的 C2f 块。一个处理通过反卷积上采样获得的 ⅛ 特征图,另一个处理通过步长卷积下采样获得的 1/32 图。
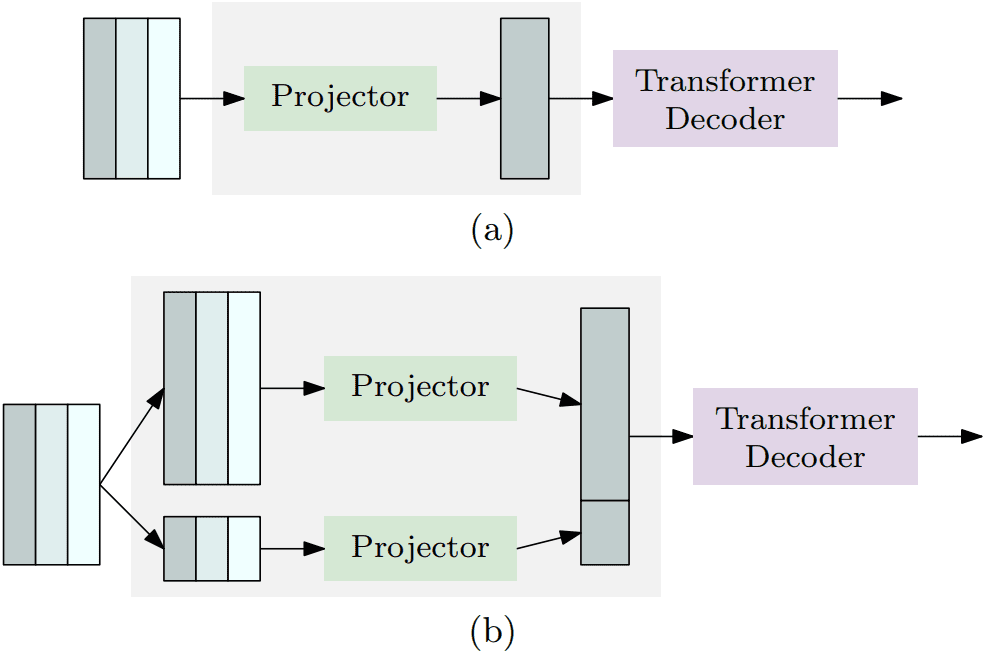
单尺度(a)和多尺度(b)投影器
三、推理结果
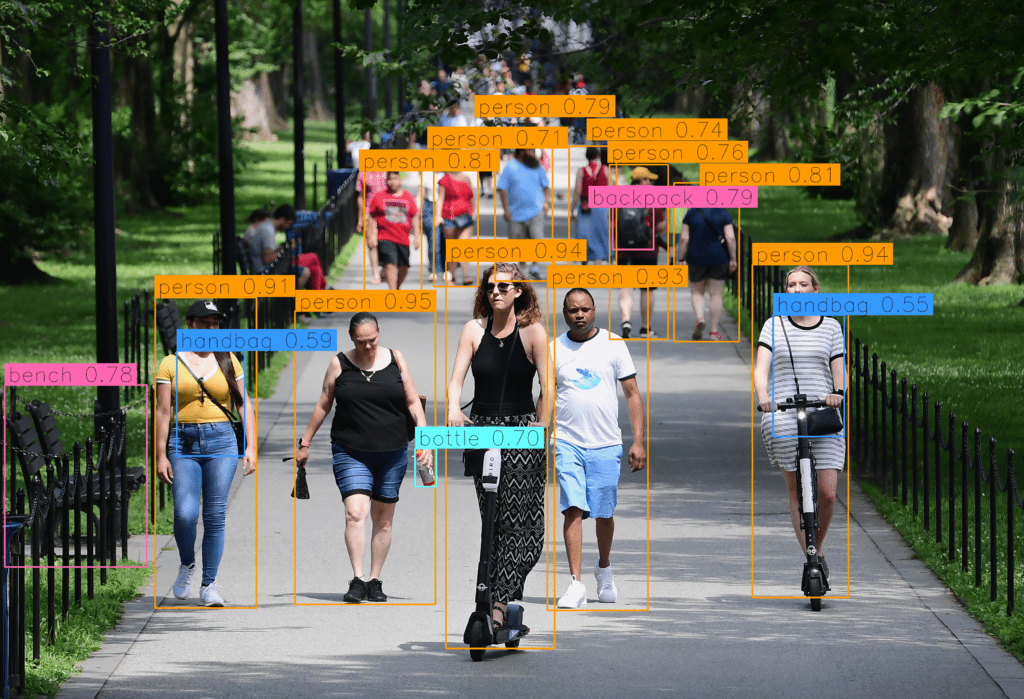
让我们通过编写一个简单的推理脚本来查看模型的开箱即用性能,该脚本由 Roboflow 提供。

目标检测前的推理图像
我们将使用下面的脚本来检测上面提供的图像中的目标。
需要注意的一点是,我们将使用由 Roboflow 创建和维护的 Supervision 库。这个库易于使用,不需要花费太多精力去理解它为对象检测任务提供的各种功能。无论你需要从硬盘加载数据集、在图像或视频上绘制检测结果,还是统计某个区域中的检测数量,都可以依靠 Supervision!
让我们开始编写代码。 :)
在进行推理之前,需要安装一些依赖项。如果你在 VS code 或终端中工作,强烈建议你创建虚拟环境并在其中进行操作,以确保更好的一致性并减少依赖项问题。
!pip install -q rfdetr==1.1.0
如果你在 Colab 中工作,像下面这样将 Roboflow 的 API 密钥集成到你的工作环境中。
import os
from google.colab import userdataos.environ["ROBOFLOW_API_KEY"] = userdata.get("ROBOFLOW_API_KEY")
现在,我们已经准备好开始推理了。
# 导入必要的库
from rfdetr import RFDETRBase
import supervision as sv
from rfdetr.util.coco_classes import COCO_CLASSES
import numpy as np
from PIL import Image# 实例化模型对象,初始化时会自动加载对应的 COCO 预训练检查点
model = RFDETRBase()# 使用 Pillow 库读取图像,也可以使用 OpenCV 或 Matplotlib
image = Image.open("path_to_your_input_image")# 执行推理,阈值决定了每个边界框的最小置信度
detections = model.predict(image, threshold=0.5)# 使用 Supervision 库可视化结果
color = sv.ColorPalette.from_hex(["#ffff00", "#ff9b00", "#ff8080", "#ff66b2", "#ff66ff", "#b266ff","#9999ff", "#3399ff", "#66ffff", "#33ff99", "#66ff66", "#99ff00"
])
text_scale = sv.calculate_optimal_text_scale(resolution_wh=image.size)
thickness = sv.calculate_optimal_line_thickness(resolution_wh=image.size)bbox_annotator = sv.BoxAnnotator(color=color, thickness=thickness)
label_annotator = sv.LabelAnnotator(color=color,text_color=sv.Color.BLACK,text_scale=text_scale,smart_position=True
)labels = [f"{COCO_CLASSES[class_id]} {confidence:.2f}"for class_id, confidence in zip(detections.class_id, detections.confidence)
]# 显示结果
annotated_image = image.copy()
annotated_image = bbox_annotator.annotate(annotated_image, detections)
annotated_image = label_annotator.annotate(annotated_image, detections, labels)
annotated_image
四、在水下数据集上进行微调
虽然 RF-DETR 在通用基准测试(如 COCO)上表现出色,并且在领域适应性方面显示出潜力,但挑战在于将其应用于特定的、小众的领域。
在水下图像数据集上对 RF-DETR 进行微调是一种强大的方法,可以将模型适应新的环境和目标类别。利用 Roboflow 的工具和资源,你可以从数据集准备到训练配置以及可视化结果的整个流程中受益。
在我们开始对水下数据集进行微调之前,需要注意的是,Roboflow 设计其微调流程时,仅允许使用 COCO 格式的数据集进行训练。COCO 格式如下:
underwater_COCO_dataset/
├── train/
│ ├── images/
│ │ ├── image1.jpg
│ │ ├── image2.jpg
│ │ └── ...
│ └── _annotations.coco.json
├── val/
│ ├── images/
│ │ ├── image1.jpg
│ │ ├── image2.jpg
│ │ └── ...
│ └── _annotations.coco.json
└── test/├── images/│ ├── image1.jpg│ ├── image2.jpg│ └── ...└── _annotations.coco.json
挑战:水下动物检测
我们选择的数据集包含各种水下动物的图像,如 fish(鱼)、jellyfish(水母)、penguin(企鹅)、puffin(海鹦)、shark(鲨鱼)、starfish(海星)和 stingray(黄貂鱼)。
与典型的陆地图像数据集相比,该领域存在不同的挑战,具体如下:
- 可见性变化
- 拟态
- 尺度变化:检测远处的小鱼和近处的大鱼
该数据集可在 Kaggle 平台上公开获取,可以将其保存到本地机器上,也可以导入到新的 Kaggle 笔记本中。
关于该数据集的一些重要细节如下:
- 已经分为训练集、验证集和测试集
- 包含 638 张图像。标注(真实值)以 YOLO 格式提供(
class_id、x_centre、y_centre、width、height) - 对每张图像应用的预处理步骤:
- 自动定向像素数据(剥离 EXIF 方向信息)
- 调整大小至 1024 x 1024(在此范围内适配)
现在我们知道数据集必须是 COCO 格式,让我们开始编写脚本,将我们的水下数据集从 YOLO 格式转换为 COCO 格式。我们还将在此博客中提供转换脚本,你可以下载并使用它。
让我们开始吧……
import json
import os
from PIL import Image
在导入所有必需的库之后,第一步是定义一个类别列表,其中包含类别名称和对应的 ID 作为 dict_keys。
# 包含 supercategory 是可选的,可以省略
categories = [{"id": 0, "name": 'fish', "supercategory": "animal"},{"id": 1, "name": 'jellyfish', "supercategory": "animal"},{"id": 2, "name": "penguin", "supercategory": "animal"},{"id": 3, "name": "puffing", "supercategory": "animal"},{"id": 4, "name": "shark", "supercategory": "animal"},{"id": 5, "name": "stingray", "supercategory": "animal"},{"id": 6, "name": "starfish", "supercategory": "animal"}
]# 创建 COCO 格式架构
coco_dataset = {"info": {},"licenses": [],"categories": categories,"images": [],"annotations": []
}
在实例化 COCO 格式架构之后,我们将创建一个图像字典,存储诸如 image_id、filename 等信息,并最终将其追加到我们的 COCO 架构字典的 images 键中。
annotation_id = 0
image_id_counter = 0for image_fol in os.listdir(train_dir_images):image_path = os.path.join(train_dir_images, image_fol)image = Image.open(image_path)width, height = image.sizeimage_id = image_id_counterimage_dict = {"id": image_id,"width": width,"height": height,"file_name": image_fol}coco_dataset["images"].append(image_dict)
从上面的代码块中,我们可以很容易地推断出,对于所有标注(真实值标签),也会创建类似的字典。因此,在相同的 for 循环中继续,我们现在将处理真实值。
# 使用 with open 语句读取 YOLO 格式文本文件中的行with open(os.path.join(train_dir_labels,f"{image_fol.split('.jpg')[0]}.txt")) as f:annotations = f.readlines()for ann in annotations:category_id = int(ann[0])x, y, w, h = map(float, ann.strip().split()[1:])x_min, y_min = int((x - w / 2) * width), int((y - h / 2) * height)x_max, y_max = int((x + w / 2) * width), int((y + h / 2) * height)bbox_width = x_max - x_minbbox_height = y_max - y_minann_dict = {"id": len(coco_dataset["annotations"]),"image_id": image_id,"category_id": category_id,"bbox": [x_min, y_min, x_max - x_min, y_max - y_min],"area": bbox_height * bbox_width,"iscrowd": 0}coco_dataset["annotations"].append(ann_dict)annotation_id += 1# 以下代码行在 for 循环之外image_id_counter += 1
最后,我们将把我们的 “coco_dataset” 对象转储到 _annotations.coco.json 文件中,这是 COCO 格式标准的文件命名方式,用于存储真实值标注。另外,output_dir 是一个目录,我们将在本地机器上的该目录中存储 _annotations.coco.json 文件。
with open(os.path.join(output_dir, '_annotations.coco.json'), 'w') as f:json.dump(coco_dataset, f)
在将我们的数据集转换为 COCO 格式之后,我们现在可以继续进行模型训练。正如 Roboflow 在其流程中创建的那样,实现起来非常简单,即使是初学者也能方便地理解。我们的实现(正如他们在官方 Colab 笔记本 中提到的训练和推理实现)使用了 Supervision 库。
from rfdetr import RFDETRBase
import supervision as svmodel = RFDETRBase(pretrain_weights="./checkpoints/checkpoint_best_regular.pth")# 定义我们的类别,与前面代码块中提到的类似
categories = [{"id": 0, "name": 'fish', "supercategory": "animal"},{"id": 1, "name": 'jellyfish', "supercategory": "animal"},{"id": 2, "name": "penguin", "supercategory": "animal"},{"id": 3, "name": "puffing", "supercategory": "animal"},{"id": 4, "name": "shark", "supercategory": "animal"},{"id": 5, "name": "stingray", "supercategory": "animal"},{"id": 6, "name": "starfish", "supercategory": "animal"}
]# 定义回调函数用于处理视频帧
def callback(frame, index):annotated_frame = frame.copy()detections = model.predict(annotated_frame, threshold=0.6)labels = [f"{categories[class_id]['name']} {confidence:.2f}"for class_id, confidence in zip(detections.class_id, detections.confidence)]annotated_frame = sv.BoxAnnotator().annotate(annotated_frame, detections)annotated_frame = sv.LabelAnnotator().annotate(annotated_frame, detections, labels)return annotated_frame# 处理视频并保存结果
sv.process_video(source_path="./video_3.mp4",target_path="./output_annotations_4.mp4",callback=callback,
)
process_video 函数将回调函数应用于每一帧,并将结果保存到目标视频文件中。
| 名称 | 类型 | 描述 | 默认值 |
| source_path | str | 源视频文件路径 | 必填 |
| target_path | str | 目标视频文件路径 | 必填 |
| callback | Callable[[ndarray, int], ndarray] | 一个函数,它接收视频帧的 numpy ndarray 表示和帧的索引(int),并返回处理后的 numpy ndarray 表示。 | 必填 |
为了评估微调后的 RF-DETR 模型在水下数据集上的性能,我们绘制了 50 个训练周期的关键评估指标。这些指标图表提供了有关模型学习行为、精度和泛化性能的宝贵见解。图表比较了 基础模型 和 指数移动平均(EMA)模型,后者有助于稳定训练,通常可以实现更好的泛化。
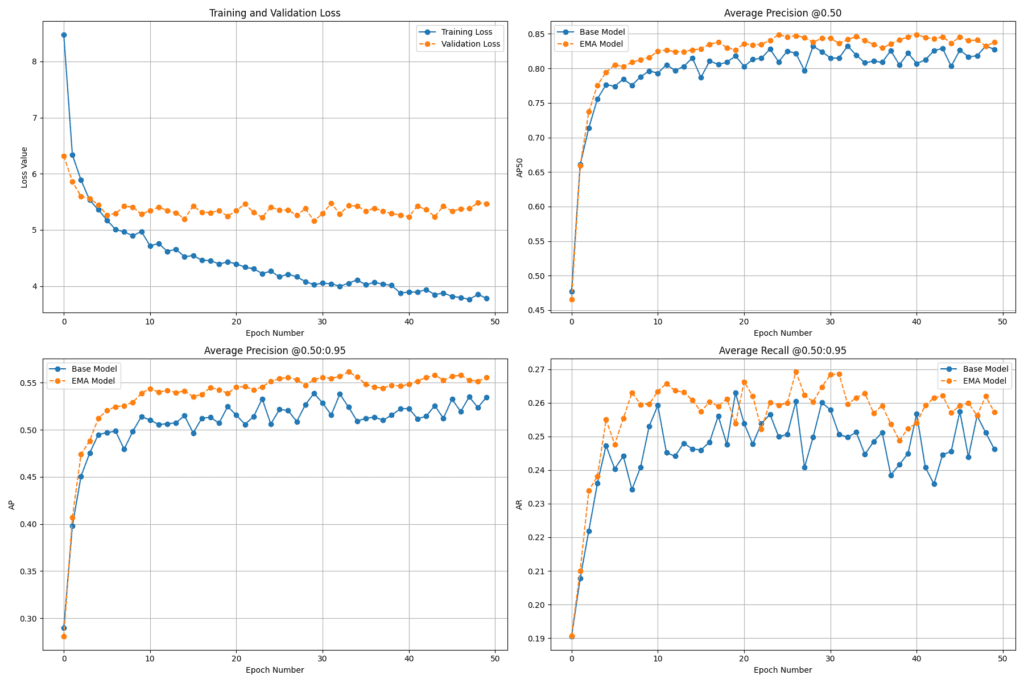
带 EMA 模型的指标图表
在总结本博客之前,下面的图像展示了在微调训练期间的 CPU/GPU 消耗情况。我们在 Kaggle 平台上利用 P100 GPU 进行了所有实验。
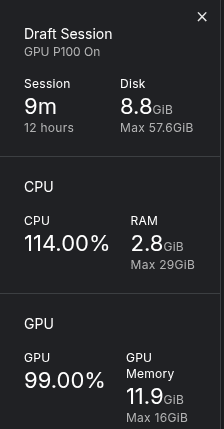
Kaggle 平台上的 GPU/CPU 消耗
五、 关键要点
- RF-DETR 是由 Roboflow 开发的实时目标检测模型,它基于 Deformable DETR 和 LW-DETR 的优势,并整合了 DINOv2 主干,以实现卓越的领域适应性。
- 该模型消除了传统检测组件(如锚点框和 NMS)的需求,利用基于 Transformer 的架构实现端到端目标检测。
- 两种模型变体 —— 基础版(29M)和大型版(128M)—— 在速度和精度之间提供了灵活性,使 RF-DETR 既适合边缘部署,也适合高性能场景。
- Roboflow 的 Supervision 库 简化了整个训练和可视化工作流程。
- 该模型可以 针对特定领域进行有效微调,如通过水下数据集进行微调,利用其预训练知识。
六、 结论
RF-DETR 证明了其在通用任务和特定领域任务中进行实时目标检测的多功能性和高性能。其强大的架构,由 Deformable DETR 和 LW-DETR 等基于 Transformer 的架构以及 DINOv2 等预训练主干提供支持,使其成为开发人员处理自定义检测问题的良好选择。
通过将 RF-DETR 与强大的工具(如 Supervision)结合使用,AI 爱好者可以快速构建高质量、生产就绪的模型,这些模型能够很好地适应新领域。无论你是部署在边缘设备上还是进行研究实验,RF-DETR 都提供了灵活性和性能,以推动你的计算机视觉项目向前发展。
原文地址:https://learnopencv.com/rf-detr-object-detection/
相关文章:
计算机视觉——速度与精度的完美结合的实时目标检测算法RF-DETR详解
概述 目标检测已经取得了长足的发展,尤其是随着基于 Transformer 的模型的兴起。RF-DETR,由 Roboflow 开发,就是这样一种模型,它兼顾了速度和精度。使用 Roboflow 的工具可以让整个过程变得更加轻松。他们的平台涵盖了从上传和标…...
系统思考:技术与产品协同
在《第五项修炼》中,彼得圣吉指出:组织中最根本的问题,往往不是个别人的能力,而是思维的局限和系统之间的断裂。我最近要给一家互联网公司交付系统思考的项目,客户希望技术和产品的管理者一起参加,也问我&a…...
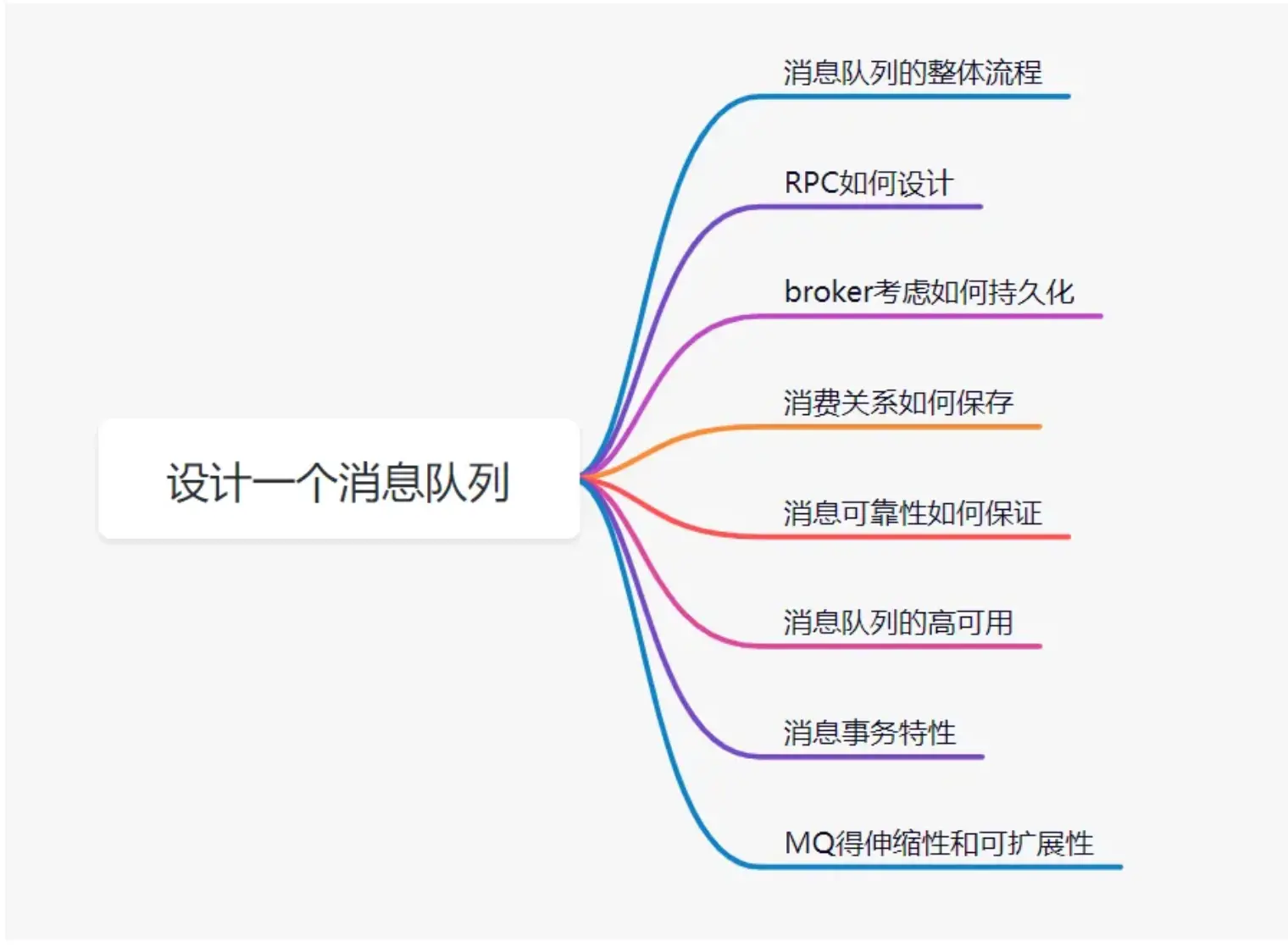
面试之消息队列
消息队列场景 什么是消息队列? 消息队列是一个使用队列来通信的组件,它的本质就是个转发器,包含发消息、存消息、消费消息。 消息队列怎么选型? 特性ActiveMQRabbitMQRocketMQKafka单机吞吐量万级万级10万级10万级时效性毫秒级…...

大文件上传Demo及面试要点
大文件上传功能实现原理 - 面试解析 在面试中解释大文件上传功能的实现原理时,可以从以下几个方面进行说明: 1. 分片上传 (Chunked Upload) 实现原理 : 前端将大文件分割为固定大小(如5MB)的多个分片(Chunk)每个分片独立上传,…...

通过阿里云Milvus与通义千问VL大模型,快速实现多模态搜索
本文主要演示了如何使用阿里云向量检索服务Milvus版与通义千问VL大模型,提取图片特征,并使用多模态Embedding模型,快速实现多模态搜索。 基于灵积(Dashscope)模型服务上的通义千问 API以及Embedding API来接入图片、文…...
使用 Spring Boot Admin 通过图形界面查看应用配置信息的完整配置详解,包含代码示例和注释,最后以表格总结关键配置
以下是使用 Spring Boot Admin 通过图形界面查看应用配置信息的完整配置详解,包含代码示例和注释,最后以表格总结关键配置: 1. 环境准备 Spring Boot 版本:2.7.x(兼容 Spring Boot Admin 2.x)Spring Boot…...

解决NSMutableData appendData性能开销太大的问题
用以下高效方式,原理上是不复制内存: dispatch_data_t accumulatedData dispatch_data_empty; // 假设我们有多个数据块需要合并 for (NSData *chunk in dataChunks) { dispatch_data_t chunkData dispatch_data_create(chunk.bytes, chunk.length, …...

雪花算法生成int64,在前端js的精度问题
1.问题背景 后端对视频生成唯一性id,在发送评论阶段,由于后端接收的json数据格式,设置videoId为int64。前端于是使用js的Number函数,进行字符串转换为数字,由于不清楚js的精度范围,产生了携带的videoId变化…...
【计算机视觉】CV实战项目 - 基于YOLOv5与DeepSORT的智能交通监控系统:原理、实战与优化
基于YOLOv5与DeepSORT的智能交通监控系统:原理、实战与优化 一、项目架构与技术解析1.1 核心算法架构1.2 学术基础 二、实战环境配置2.1 硬件要求与系统配置2.2 分步安装指南 三、核心功能实战3.1 基础车辆计数3.2 自定义检测类别3.3 多区域计数配置 四、性能优化技…...
等级考试试卷-实际操作-测评师)
2025年3月电子学会青少年机器人技术(四级)等级考试试卷-实际操作-测评师
青少年机器人技术等级考试实际操作试卷(四级)-测评师 分数:100 题数:2 一、电路搭设(共1题,共20分) 1. 元器件: (1)装置中包含交通灯模块(或元器件);(2分…...
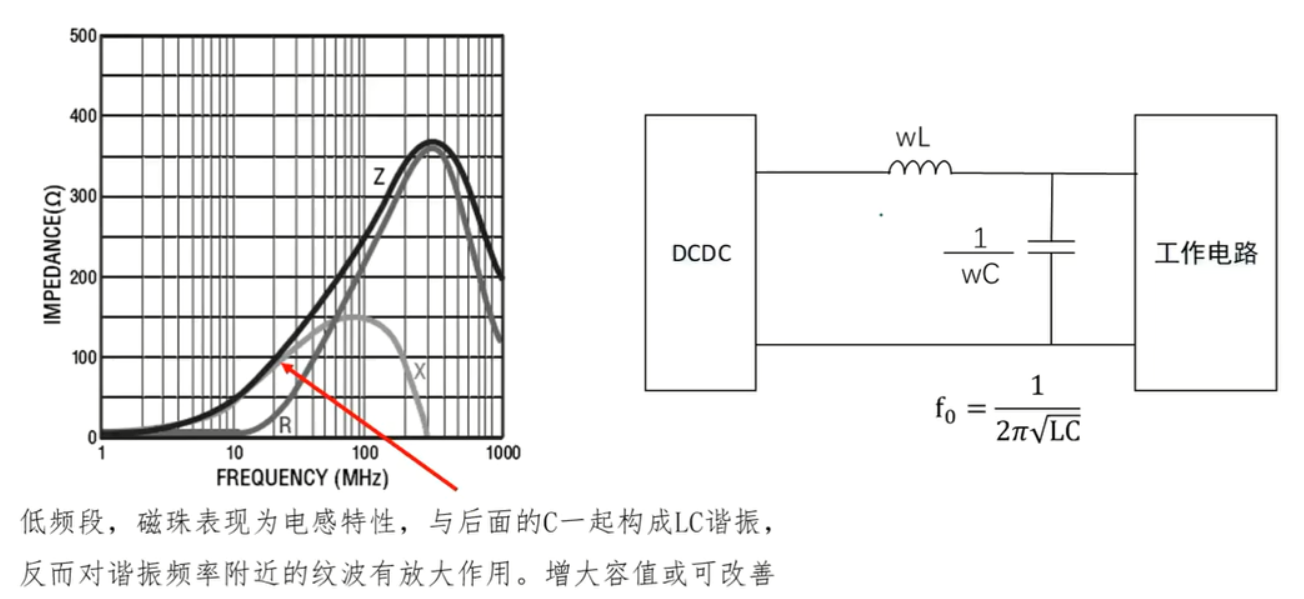
17.磁珠在EMC设计中的运用
磁珠在EMC设计中的运用 1. 磁珠的高频等效特性2. 磁珠的参数分析与选型3. 磁珠应用中的隐患问题 1. 磁珠的高频等效特性 和磁环类似,低频段感性jwL为主,高频段阻性R为主。 2. 磁珠的参数分析与选型 不需要太在意磁珠在100MHz时的电阻值,选型…...

React vs Vue:性能对决
React vs Vue:性能对决 🚀 渲染机制流程图 #mermaid-svg-LWSKliWNGUh9tZcM {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg-LWSKliWNGUh9tZcM .error-icon{fill:#552222;}#mermaid-svg-LWSKliWNGUh9tZcM .error-…...

Mediamtx与FFmpeg远程与本地推拉流使用
1.本地推拉流 启服 推流 ffmpeg -re -stream_loop -1 -i ./DJI_0463.MP4 -s 1280x720 -an -c:v h264 -b:v 2000k -maxrate 2500k -minrate 1500k -bufsize 3000k -rtsp_transport tcp -f rtsp rtsp://127.0.0.1:8554/stream 拉流 ffplay -rtsp_transport tcp rtsp://43.136.…...

DPIN在AI+DePIN孟买峰会阐述全球GPU生态系统的战略愿景
DPIN基金会在3月29日于印度孟买举行的AIDePIN峰会上展示了其愿景和未来5年的具体发展计划,旨在塑造去中心化算力的未来。本次活动汇集了DPIN、QPIN、社区成员和Web3行业资深顾问,深入探讨DPIN构建全球领先的去中心化GPU算力网络的战略,该网络…...

React:<></>的存在是为了什么
1. <></> 是什么? <></> 是 React 的Fragment(片段)语法糖,等价于 <React.Fragment></React.Fragment>。 2. 它的作用 主要作用: 允许你在组件里返回多个元素,而不需…...
详解)
Android Build Variants(构建变体)详解
Android Build Variants(构建变体)是 Android 开发中用于生成不同版本应用程序的一种机制。它允许开发者根据不同的需求,如不同的应用市场、不同的功能模块、不同的环境配置等,从同一个代码库中生成多个不同的 APK。 组成部分 B…...
Visual Studio Code 使用tab键往左和往右缩进内容
使用VSCode写东西,经常遇到多行内容同时缩进的情况,今天写文档的时候就碰到,记录下来: 往右缩进 选中多行内容,点tab键,会整体往右缩进: 往左缩进 选中多行内容,按shifttab&am…...

【KWDB 创作者计划】_嵌入式硬件篇---寄存器与存储器截断与溢出
文章目录 前言一、寄存器与存储器1. 定义与基本概念寄存器(Register)位置功能特点存储器(Memory)位置功能特点2. 关键区别3. 层级关系与协作存储层次结构协作示例4. 为什么需要寄存器性能优化指令支持减少总线竞争5. 其他寄存器类型专用寄存器程序计数器(PC)栈指针(SP)…...

Python中的 for 与 迭代器
文章目录 一、for 循环的底层机制示例:手动模拟 for 循环 二、可迭代对象 vs 迭代器关键区别: 三、for 循环的典型应用场景1. 遍历序列类型2. 遍历字典3. 结合 range() 生成数字序列4. 遍历文件内容 四、迭代器的自定义实现示例:生成斐波那契…...

C语言编程--15.四数之和
题目: 给你一个由 n 个整数组成的数组 nums ,和一个目标值 target 。请你找出并返回满足下述全部条件且不重复的四元组 [nums[a], nums[b], nums[c], nums[d]] (若两个四元组元素一一对应,则认为两个四元组重复)&…...

HTML、XHTML 和 XML区别
HTML、XHTML 和 XML 这三兄弟的区别 HTML: 老大哥,负责网页长啥样,性格比较随和,有点小错误也能容忍。XHTML: 二哥,看着像 HTML,但规矩严,是按 XML 的规矩来的 HTML,更规范。XML: 小弟,负责存储和传输数据,非常灵活,标签可以自己随便定,但规矩最严。它们仨长啥样?(…...
)
LeetCode 2799.统计完全子数组的数目:滑动窗口(哈希表)
【LetMeFly】2799.统计完全子数组的数目:滑动窗口(哈希表) 力扣题目链接:https://leetcode.cn/problems/count-complete-subarrays-in-an-array/ 给你一个由 正 整数组成的数组 nums 。 如果数组中的某个子数组满足下述条件&am…...

【高中数学/古典概率】4红2黑六选二,求取出两次都是红球的概率
【问题】 袋子里装4只红球,2只黑球,大小完全相同,抽两次球,每次抽一只,抽出后不再放回,求取出的两次都是红球的概率。 【来源】 数林外传系列之《概率与期望》P20 单埻著 中国科学技术大学出版社 【数学…...

QLExpress 深度解析:构建动态规则引擎的利器
QLExpress 深度解析:构建动态规则引擎的利器 在现代业务系统中,“规则变更快、逻辑复杂、发布要求高”已成为常态。传统硬编码已无法满足这种需求。本文以阿里巴巴开源的轻量级表达式引擎 QLExpress 为例,从实际应用、核心结构到落地建议,系统解析其强大能力和设计哲学。 …...
)
aarcpy 列表函数的使用(1)
arcpy.ListFeatureClasses() 该函数用于列出指定工作空间中的所有要素类。可以通过通配符和过滤条件进一步筛选结果。 语法: python arcpy.ListFeatureClasses(wild_cardNone, feature_typeNone)• wild_card:用于筛选要素类名称的通配符,…...
——STL之搜索算法)
C++学习笔记(三十七)——STL之搜索算法
STL 算法分类: 类别常见算法作用排序sort、stable_sort、partial_sort、nth_element等排序搜索find、find_if、count、count_if、binary_search等查找元素修改copy、replace、replace_if、swap、fill等修改容器内容删除remove、remove_if、unique等删除元素归约for…...

MySQL 9.3 正式发布!备份、用户管理与开发支持迎来革命性升级
开源数据库领域的标杆产品MySQL迎来重大更新——MySQL 9.3正式发布!作为企业级数据库的“扛把子”,此次版本更新聚焦备份效率、用户管理精细化、开发支持增强三大核心领域,同时在高可用性和性能优化上实现突破。以下为你逐一解读新版本的亮点…...
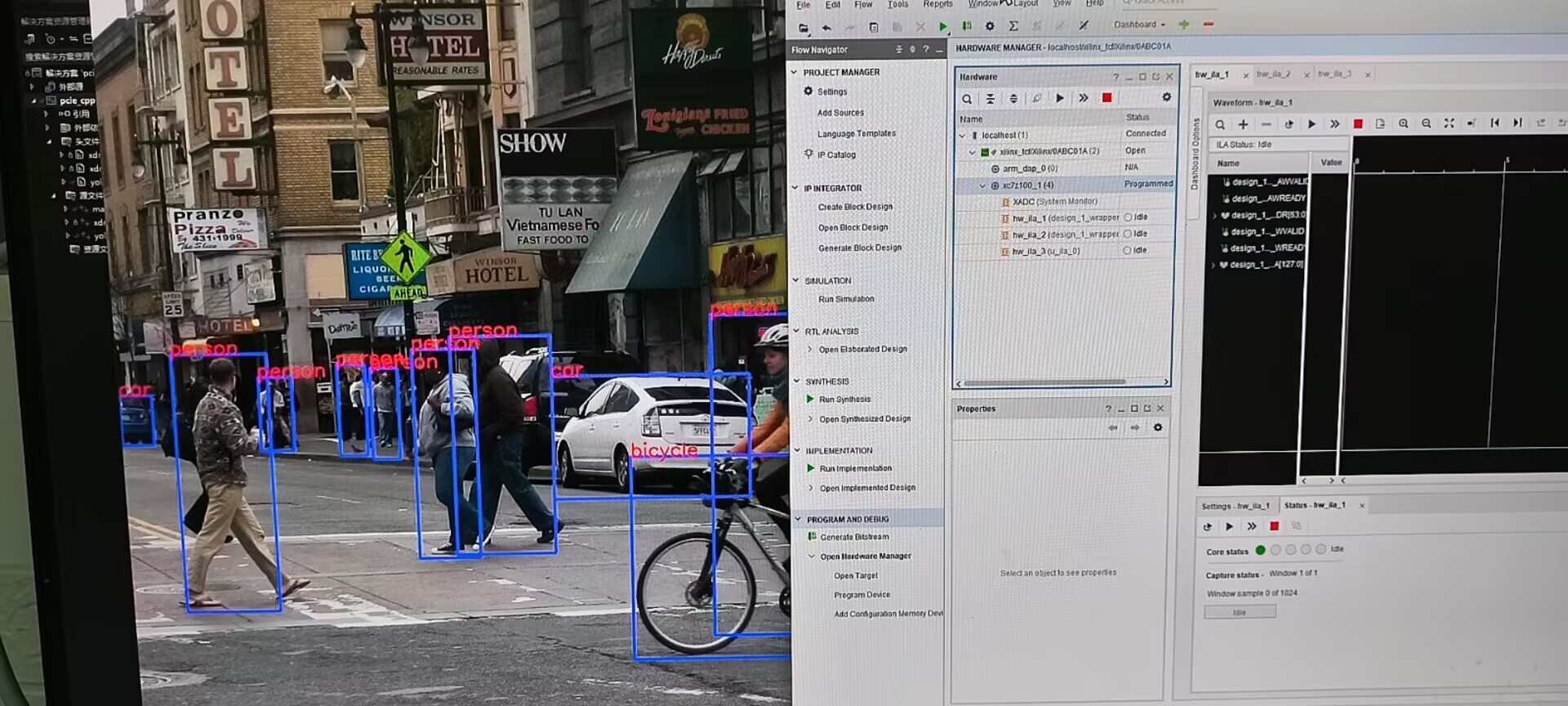
FPGA上实现YOLOv5的一般过程
在FPGA上实现YOLOv5 YOLO算法现在被工业界广泛的应用,虽说现在有很多的NPU供我们使用,但是我们为了自己去实现一个NPU所以在本文中去实现了一个可以在FPGA上运行的YOLOv5。 YOLOv5的开源代码链接为 https://github.com/ultralytics/yolov5 为了在FPGA中…...

4U带屏基于DSP/ARM+FPGA+AI的电力故障录波装置设计方案,支持全国产化
4U带屏DSP/ARMFPGAAI电力故障录波分析仪,支持国产化,含有CPU主控模块,96路模拟量采集,256路开关量,通讯扩展卡等#电力故障录波#4U带屏#新能源#电力监测 主要特点 1)是采用嵌入式图形系统,以及…...
数据库数据删除与修改实验
数据库数据删除与修改实验 在数据库原理的学习中,数据的删除与修改是核心操作技能。通过“删除修改数据”实验,我系统实践了 SQL 中 UPDATE 和 DELETE 语句的多种应用场景,从基础语法到复杂业务逻辑处理,积累了丰富的实战经验。本…...