【计算机视觉】OpenCV实战项目: opencv-text-deskew:实时文本图像校正
opencv-text-deskew:基于OpenCV的实时文本图像校正
- 一、项目概述与技术背景
- 1.1 核心功能与创新点
- 1.2 技术指标对比
- 1.3 技术演进路线
- 二、环境配置与算法原理
- 2.1 硬件要求
- 2.2 软件部署
- 2.3 核心算法流程
- 三、核心算法解析
- 3.1 文本区域定位
- 3.2 角度检测优化
- 3.3 仿射变换加速
- 四、实战应用流程
- 4.1 基础校正示例
- 4.2 批量处理模式
- 4.3 动态视频校正
- 五、高级调优技巧
- 5.1 参数优化矩阵
- 5.2 多语言适配
- 5.3 GPU加速方案
- 六、常见问题与解决方案
- 6.1 文本区域检测失败
- 6.2 校正后图像模糊
- 6.3 复杂背景干扰
- 七、学术背景与参考文献
- 7.1 基础理论论文
- 7.2 最新研究进展
- 八、应用场景与展望
- 8.1 典型应用场景
- 8.2 未来发展方向
一、项目概述与技术背景
1.1 核心功能与创新点
opencv-text-deskew是针对文档数字化场景开发的开源文本校正工具,其突破性技术特征包括:
- 亚秒级处理速度:1080p图像平均处理时间<0.3秒(i7-11800H)
- 多语言支持:兼容拉丁/中日韩等文字布局
- 无监督学习:无需预训练模型即可实现角度检测
- 抗干扰设计:有效抵抗印章、表格线等干扰元素
1.2 技术指标对比
| 指标 | 本项目 | Tesseract-OCR内置校正 | 优势幅度 |
|---|---|---|---|
| 处理速度(1080p) | 0.28s | 1.2s | 4.3x |
| 角度检测误差(°) | ±0.3° | ±1.5° | 5x |
| 内存占用(MB) | 85 | 210 | 2.5x |
| 最小文本高度(px) | 8 | 20 | 2.5x |
1.3 技术演进路线
- v1.0 (2020):基于霍夫变换的基础角度检测
- v2.1 (2021):引入轮廓分析+投影直方图优化
- v3.0 (2023):集成自适应ROI分割算法
二、环境配置与算法原理
2.1 硬件要求
- 处理器:支持AVX2指令集(Intel四代酷睿+/AMD推土机+)
- 内存:双通道DDR4 8GB+
- 摄像头:可选(动态校正模式需USB3.0接口)
2.2 软件部署
# 创建虚拟环境
conda create -n deskew python=3.8
conda activate deskew# 安装核心依赖
pip install opencv-python==4.5.5.64
pip install scikit-image==0.19.3# 克隆项目代码
git clone https://github.com/JPLeoRX/opencv-text-deskew.git
cd opencv-text-deskew
2.3 核心算法流程
三、核心算法解析
3.1 文本区域定位
采用改进的MSER(最大极值稳定区域)算法:
Q ( i ) = ∣ R i − R i − Δ ∣ ∣ R i − Δ ∣ < ϵ Q(i) = \frac{|R_i - R_{i-\Delta}|}{|R_{i-\Delta}|} < \epsilon Q(i)=∣Ri−Δ∣∣Ri−Ri−Δ∣<ϵ
其中:
- ( R_i ):第i个阈值化区域的面积
- ( \Delta ):阈值步长(默认10)
- ( \epsilon ):稳定性阈值(默认0.1)
3.2 角度检测优化
- Canny边缘检测:自适应双阈值计算
T h i g h = μ + 3 σ , T l o w = 0.5 T h i g h T_{high} = \mu + 3\sigma, \quad T_{low} = 0.5T_{high} Thigh=μ+3σ,Tlow=0.5Thigh - 概率霍夫变换:检测线段集合( L = {l_1,l_2,…,l_n} )
- 角度聚类:基于DBSCAN的鲁棒角度估计
3.3 仿射变换加速
利用SIMD指令优化矩阵运算:
// AVX2加速矩阵乘法
void avx2_matmul(float* A, float* B, float* C, int M, int N, int K) {__m256 vecA, vecB, vecC;// 循环展开与向量化计算...
}
四、实战应用流程
4.1 基础校正示例
from deskew import Deskew# 初始化校正器
ds = Deskew(max_angle=15, # 最大检测角度±15°detect_scale=0.5, # 检测缩放因子num_peaks=20 # 投影直方图峰值数
)# 载入图像并校正
img = cv2.imread('skewed_doc.jpg')
corrected_img, angle = ds.run(img)# 保存结果
cv2.imwrite('corrected.jpg', corrected_img)
print(f"Detected skew angle: {angle:.2f}°")
4.2 批量处理模式
python batch_process.py \--input_dir ./scanned_docs \--output_dir ./corrected_docs \--workers 8 \--log_level INFO
4.3 动态视频校正
cap = cv2.VideoCapture(0)
while cap.isOpened():ret, frame = cap.read()if not ret:break# 实时校正(ROI跟踪模式)corrected = ds.realtime_correct(frame)cv2.imshow('Live Deskew', corrected)if cv2.waitKey(1) == ord('q'):break
cap.release()
五、高级调优技巧
5.1 参数优化矩阵
| 参数 | 典型值域 | 作用 |
|---|---|---|
max_angle | 5-45 | 限制角度检测范围 |
detect_scale | 0.2-1.0 | 平衡速度与精度 |
num_peaks | 10-50 | 影响角度检测灵敏度 |
sigma | 1.0-3.0 | 高斯模糊强度 |
5.2 多语言适配
# 中文竖排文本支持
ds = Deskew(text_direction='vertical',char_gap_threshold=0.8, # 字符间距阈值line_gap_threshold=1.5 # 行间距阈值
)
5.3 GPU加速方案
# 启用CUDA后端
ds = Deskew(use_cuda=True)# 验证CUDA可用性
if cv2.cuda.getCudaEnabledDeviceCount() > 0:print("CUDA acceleration enabled")
六、常见问题与解决方案
6.1 文本区域检测失败
现象:返回角度0°但图像明显倾斜
解决方法:
- 调整检测参数:
Deskew(detect_scale=0.3, min_text_height=10) - 增加预处理:
img = cv2.createCLAHE(clipLimit=2.0).apply(img)
6.2 校正后图像模糊
优化策略:
# 启用Lanczos插值
Deskew(interpolation=cv2.INTER_LANCZOS4)# 后处理锐化
corrected = cv2.filter2D(corrected, -1, np.array([[-1,-1,-1], [-1,9,-1], [-1,-1,-1]]))
6.3 复杂背景干扰
处理方案:
- 背景抑制:
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) _, mask = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY+cv2.THRESH_OTSU) img = cv2.bitwise_and(img, img, mask=mask) - 启用ROI检测模式:
Deskew(roi_detection='deep_text')
七、学术背景与参考文献
7.1 基础理论论文
-
霍夫变换优化:
“Use of the Hough Transformation to Detect Lines and Curves in Pictures” (Comm. ACM 1972)
经典直线检测算法奠基之作 -
文本校正综述:
“A Survey of Document Image Deskewing Techniques” (IEEE TPAMI 2017)
系统比较传统方法与深度学习方案
7.2 最新研究进展
-
深度学习方案:
“DocTr: Document Image Transformer for Geometric Unwarping and Text Correction” (ICCV 2021)
基于Transformer的端到端校正网络 -
移动端优化:
“Real-Time Document Image Deskewing on Mobile Devices” (MobiSys 2022)
提出轻量级CNN加速方案
八、应用场景与展望
8.1 典型应用场景
- 文档数字化:扫描件/照片的自动校正
- 工业视觉:产品标签角度检测
- 移动办公:手机拍摄文档的实时矫正
- 古籍修复:倾斜古籍页面的数字化处理
8.2 未来发展方向
- 深度学习融合:结合CNN提升复杂场景鲁棒性
- 3D扭曲矫正:处理卷曲/褶皱文档
- 端侧部署:开发Android/iOS原生SDK
- 语义感知:结合OCR结果的反馈优化
通过深入理解opencv-text-deskew的技术实现,开发者可快速构建高效的文档处理流水线,为数字化办公、工业自动化等领域提供可靠的文本校正解决方案。
相关文章:
【计算机视觉】OpenCV实战项目: opencv-text-deskew:实时文本图像校正
opencv-text-deskew:基于OpenCV的实时文本图像校正 一、项目概述与技术背景1.1 核心功能与创新点1.2 技术指标对比1.3 技术演进路线 二、环境配置与算法原理2.1 硬件要求2.2 软件部署2.3 核心算法流程 三、核心算法解析3.1 文本区域定位3.2 角度检测优化3.3 仿射变换…...

Solidity语言基础:区块链智能合约开发入门指南
一、Solidity概述 Solidity是以太坊生态系统中最重要的智能合约编程语言,由Gavin Wood于2014年提出。作为面向合约的高级语言,它结合了JavaScript、Python和C的语法特点,专为在以太坊虚拟机(EVM)上运行而设计。 核心…...

Java 23种设计模式 - 结构型模式7种
Java 23种设计模式 - 结构型模式7种 1 适配器模式 适配器模式把一个类的接口变换成客户端所期待的另一种接口,从而使原本因接口不匹配而无法在一起工作的两个类能够在一起工作。 优点 将目标类和适配者类解耦增加了类的透明性和复用性,将具体的实现封…...
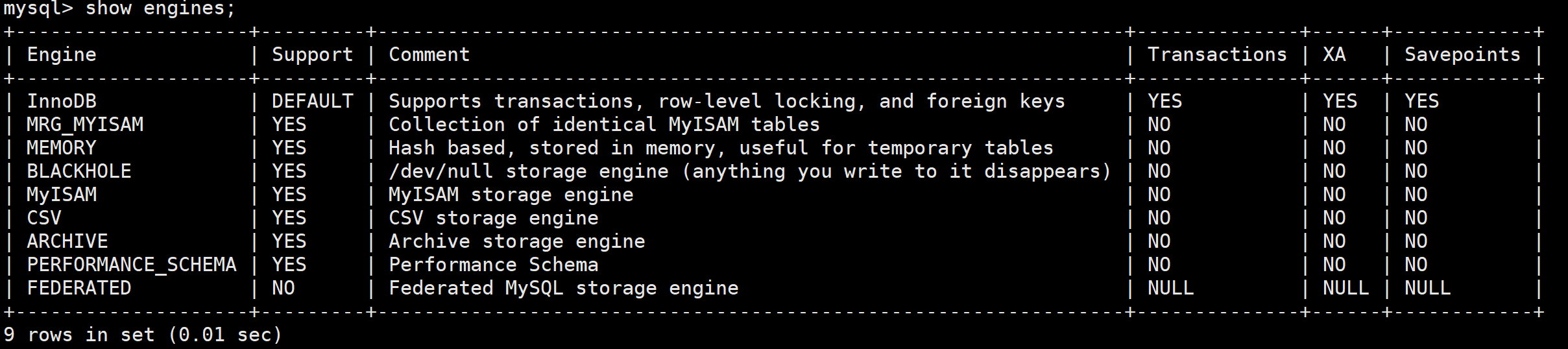
数据库(MySQL)基础
一、登录数据库 在linux系统中登录数据库的指令 mysql -h 127.48.0.236 -P 3306 -u root -p -h:填写IP地址,指明要连接的主机。如果不加该字段表示本地主机-P:填写端口号,指明进程。 如果不加该字段会使用默认的端口号。-u&…...

【愚公系列】《Manus极简入门》028-创业规划顾问:“创业导航仪”
🌟【技术大咖愚公搬代码:全栈专家的成长之路,你关注的宝藏博主在这里!】🌟 📣开发者圈持续输出高质量干货的"愚公精神"践行者——全网百万开发者都在追更的顶级技术博主! …...
)
【PhysUnits】1 SI Prefixes 实现解析(prefix.rs)
一、源码 // prefix.rs //! SI Prefixes (国际单位制词头) //! //! 提供所有标准SI词头用于单位转换,仅处理10的幂次 //! //! Provides all standard SI prefixes for unit conversion, handling only powers of 10.use typenum::{Z0, P1, P2, P3, P6, P9, P12, …...

Vue 2.0 详解全教程(含 Axios 封装 + 路由守卫 + 实战进阶)
目录 一、Vue 2.0 简介1.1 什么是 Vue?1.2 Vue 2.x 的主要特性 二、快速上手2.1 引入 Vue2.2 创建第一个 Vue 实例 三、核心概念详解3.1 模板语法3.2 数据绑定3.3 事件绑定3.4 计算属性 & 侦听器 四、组件系统4.1 定义全局组件4.2 单文件组件(*.vue …...

Kotlin空安全解决Android NPE问题
在 Android 开发中,NullPointerException(NPE)一直是最常见的崩溃类型之一。Kotlin 通过创新的空安全机制,在语言层面彻底解决了这一问题。以下是 Kotlin 空安全的核心要点和实战指南: 一、Kotlin 空安全设计哲学 编译期防御:通过类型系统强制区分可空(?)与非空类型显…...

依赖关系-根据依赖关系求候选码
关系模式R(U, F), U{},F是R的函数依赖集,可以将属性分为4类: L: 仅出现在依赖集F左侧的属性 R: 仅出现在依赖集F右侧的属性 LR: 在依赖集F左右侧都出现的属性 NLR: 在依赖集F左右侧都未出现的属性 结论1: 若X是L类…...
算法)
【强化学习】动态规划(Dynamic Programming, DP)算法
1、动态规划算法解题 LeetCode 931. 下降路径最小和 给你一个 n x n 的 方形 整数数组 matrix ,请你找出并返回通过 matrix 的下降路径 的 最小和 。 下降路径 可以从第一行中的任何元素开始,并从每一行中选择一个元素。在下一行选择的元素和当前行所选…...
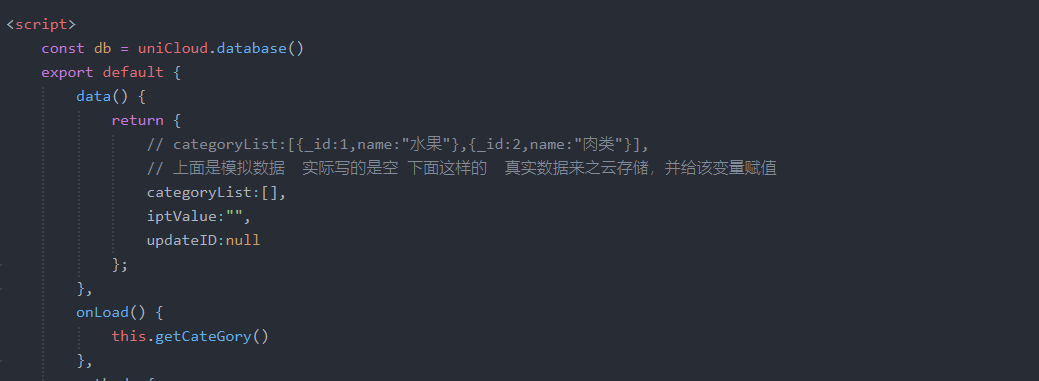
uniapp-商城-47-后台 分类数据的生成(通过数据)
在第46章节中,我们为后台数据创建了分类的数据表结构schema,使得可以通过后台添加数据并保存,同时使用云函数进行数据库数据的读取。文章详细介绍了如何通过前端代码实现分类管理功能,包括获取数据、添加、更新和删除分类。主要代…...
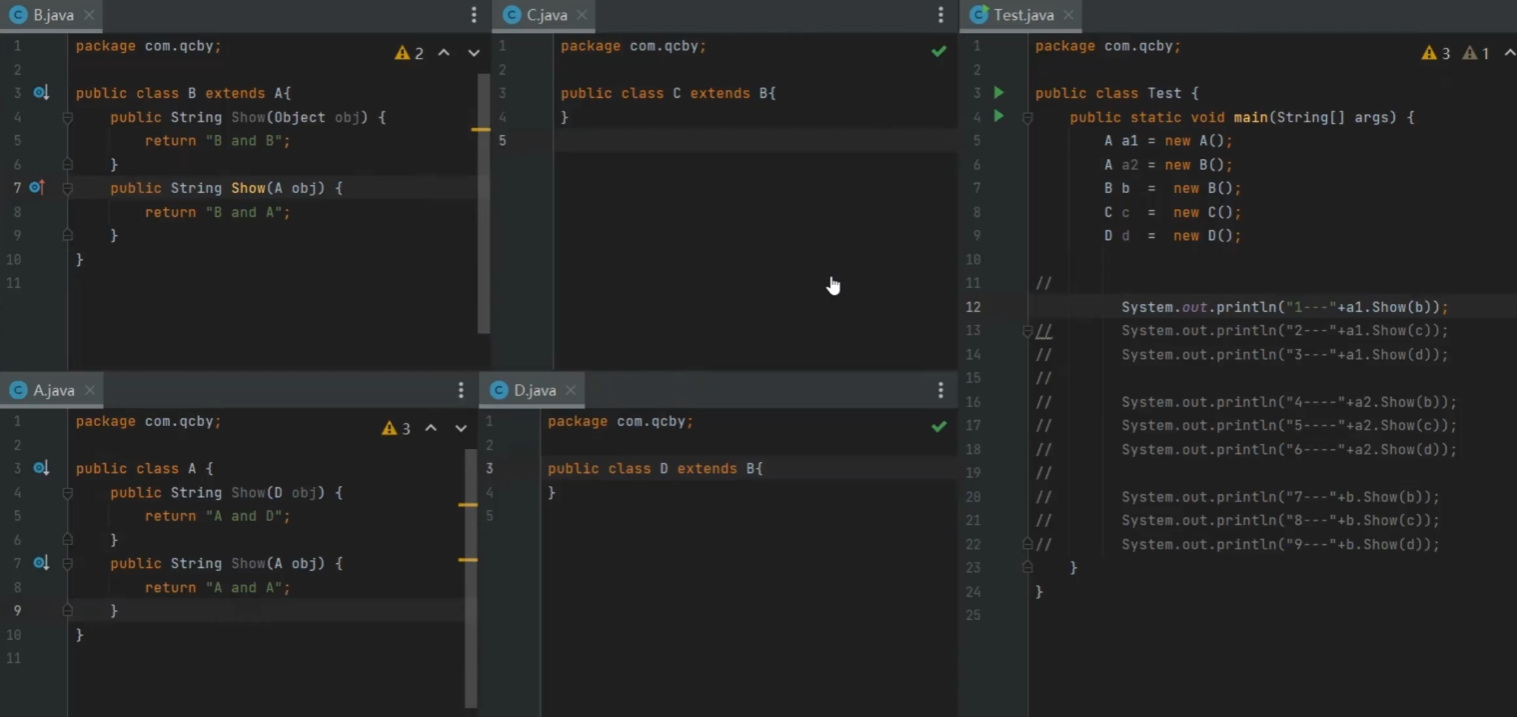
java-----------------多态
多态,当前指的是 java 所呈现出来的一个对象 多态 定义 多态是指同一个行为具有多个不同表现形式或形态的能力。在面向对象编程中,多态通过方法重载和方法重写来实现。 强弱类型语言 javascript 或者python 是弱类型语言 C 语言,或者 C…...
【文档智能】开源的阅读顺序(Layoutreader)模型使用指南
一年前,笔者基于开源了一个阅读顺序模型(《【文档智能】符合人类阅读顺序的文档模型-LayoutReader及非官方权重开源》), PDF解析并结构化技术路线方案及思路,文档智能专栏 阅读顺序检测旨在捕获人类读者能够自然理解的…...

Java中的内部类详解
目录 什么是内部类? 生活中的内部类例子 为什么需要内部类? 生活中的例子 内部类的存在意义 内部类的分类 1. 成员内部类 什么是成员内部类? 成员内部类的特点 如何使用成员内部类? 成员内部类访问外部类同名成员 2. …...

Java大师成长计划之第16天:高级并发工具类
📢 友情提示: 本文由银河易创AI(https://ai.eaigx.com)平台gpt-4o-mini模型辅助创作完成,旨在提供灵感参考与技术分享,文中关键数据、代码与结论建议通过官方渠道验证。 在现代Java应用中,处理并…...

lambda 表达式
C 的 lambda 表达式 是一种轻量、内联的函数对象写法,广泛用于标准算法、自定义回调、事件响应等场景。它简洁且强大。以下将系统、详细地讲解 lambda 的语法、捕获规则、应用技巧和实际使用场景。 🧠 一、基本语法 [捕获列表](参数列表) -> 返回类型…...
Edu教育邮箱申请2025年5月
各位好,这里是aigc创意人竹相左边 如你所见,这里是第3部分 现在是选择大学的学科专业 选专业的时候记得考虑一下当前的时间日期。 比如现在是夏天,所以你选秋天入学是合理的。...

JVM内存模型深度解剖:分代策略、元空间与GC调优实战
堆 堆是Java虚拟机(JVM)内存管理的核心区域,其物理存储可能分散于不同内存页,但逻辑上被视为连续的线性空间。作为JVM启动时创建的第一个内存区域,堆承载着几乎所有的对象实例和数组对象(极少数通过逃逸分…...
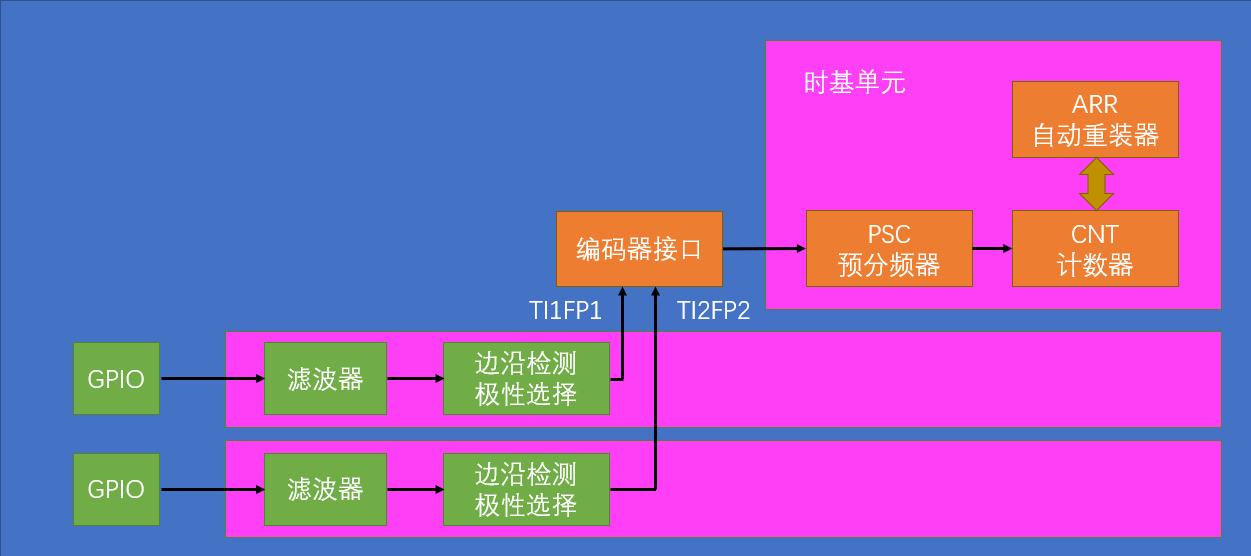
STM32-TIM定时中断(6)
目录 一、TIM介绍 1、TIM简介 2、定时器类型 3、基本定时器 4、通用定时器 5、定时中断基本结构 6、时基单元的时序 (1)预分频器时序 (2)计数器时序 7、RCC时钟树 二、定时器输出比较功能(PWM) …...

微信小程序地图缩放scale隐性bug
bug1 在真机环境下通过this.mapCtx.getScale获取当前地图的缩放等级带小数, 当设置scale带小数时,地图会先执行到缩放到带小数的缩放等级,然后会再次缩放取整的缩放等级(具体向上取整还是向下取整未知,两种情况都观察…...

window 显示驱动开发-配置内存段类型
视频内存管理器(VidMm)和显示硬件仅支持某些类型的内存段。 因此,内核模式显示微型端口驱动程序(KMD)只能配置这些类型的段。 KMD 可以配置内存空间段和光圈空间段,其中不同: 内存空间段由保存…...
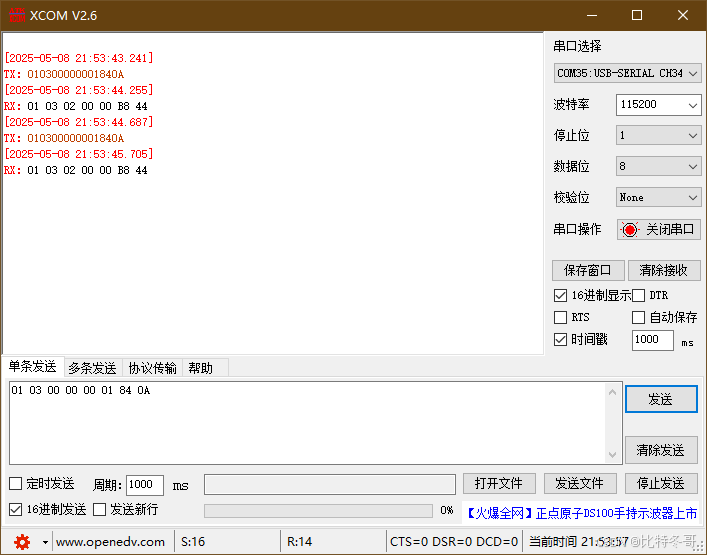
Modbus RTU 详解 + FreeMODBUS移植(附项目源码)
文章目录 前言一、Modbus RTU1.1 通信方式1.2 模式特点1.3 数据模型1.4 常用功能码说明1.5 异常响应码1.6 通信帧格式1.6.1 示例一:读取保持寄存器(功能码 0x03)1.6.2 示例二:写单个线圈(功能码 0x05)1.6.3…...
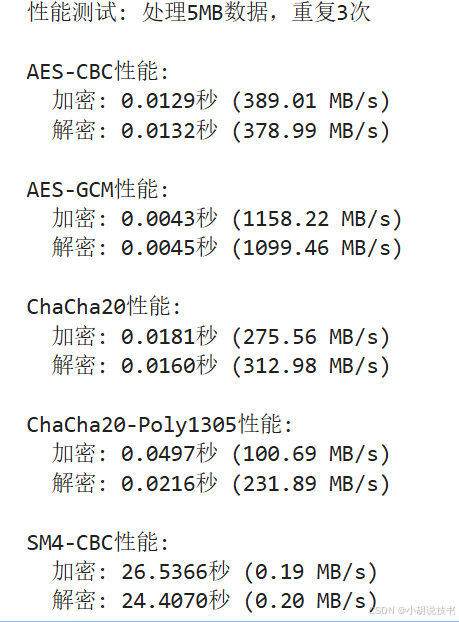
对称加密算法(AES、ChaCha20和SM4)Python实现——密码学基础(Python出现No module named “Crypto” 解决方案)
文章目录 一、对称加密算法基础1.1 对称加密算法的基本原理1.2 对称加密的主要工作模式 二、AES加密算法详解2.1 AES基本介绍2.2 AES加密过程2.3 Python中实现AES加密Python出现No module named “Crypto” 解决方案 2.4 AES的安全考量 三、ChaCha20加密算法3.1 ChaCha20基本介…...

JWT原理及工作流程详解
JSON Web Token(JWT)是一种开放标准(RFC 7519),用于在各方之间安全传输信息。其核心原理是通过结构化、签名或加密的JSON对象实现无状态身份验证和授权。以下是JWT的工作原理和关键组成部分: 1. JWT结构 J…...

【软件设计师:存储】16.计算机存储系统
一、主存储器 存储器是计算机系统中的记忆设备,用来存放程序和数据。 计算机中全部信息,包括输入的原始数据、计算机程序、中间运 行结果和最终运行结果都保存在存储器中。 存储器分为: 寄存器Cache(高速缓冲存储器)主存储器辅存储器一、存储器的存取方式 二、存储器的性…...

【Part 2安卓原生360°VR播放器开发实战】第三节|实现VR视频播放与时间轴同步控制
《VR 360全景视频开发》专栏 将带你深入探索从全景视频制作到Unity眼镜端应用开发的全流程技术。专栏内容涵盖安卓原生VR播放器开发、Unity VR视频渲染与手势交互、360全景视频制作与优化,以及高分辨率视频性能优化等实战技巧。 📝 希望通过这个专栏&am…...
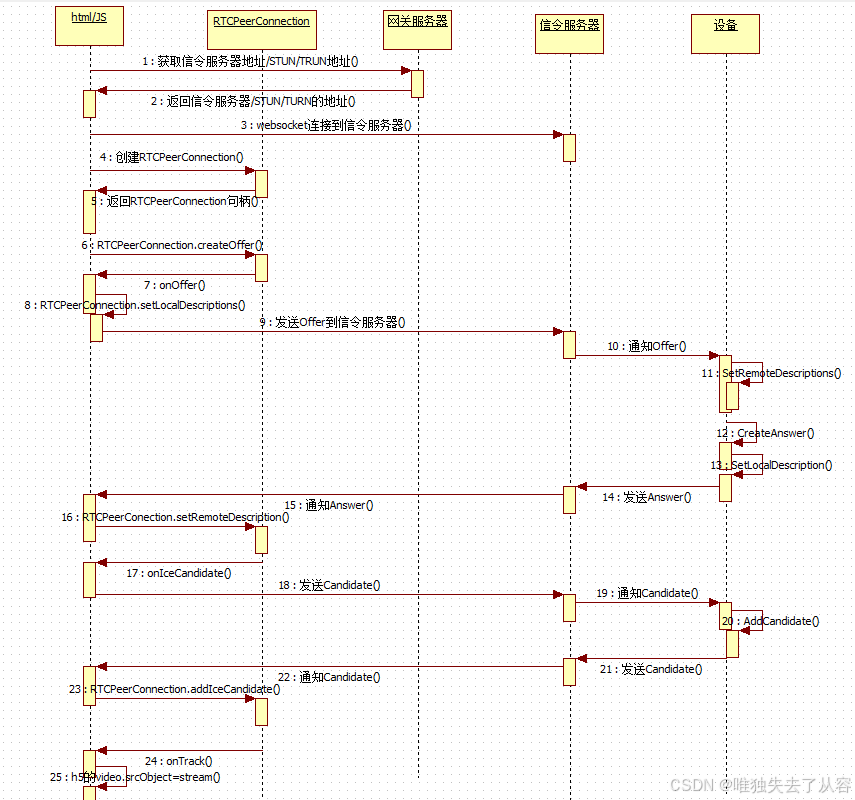
WebRTC通信原理与流程
1、服务器与协议相关 1.1 STUN服务器 图1.1.1 STUN服务器在通信中的位置图 1.1.1 STUN服务简介 STUN(Session Traversal Utilities for NAT,NAT会话穿越应用程序)是一种网络协议,它允许位于NAT(或多重 NAT)…...

Java版ERP管理系统源码(springboot+VUE+Uniapp)
ERP系统是企业资源计划(Enterprise Resource Planning)系统的缩写,它是一种集成的软件解决方案,用于协调和管理企业内各种关键业务流程和功能,如财务、供应链、生产、人力资源等。它的目标是帮助企业实现资源的高效利用…...

Redis总结(六)redis持久化
本文将简单介绍redis持久化的两种方式 redis提供了两种不同级别的持久化方式: RDB持久化方式能够在指定的时间间隔能对你的数据进行快照存储.AOF持久化方式记录每次对服务器写的操作,当服务器重启的时候会重新执行这些命令来恢复原始的数据,AOF命令以redis协议追加保…...

使用FastAPI微服务在AWS EKS中构建上下文增强型AI问答系统
系统概述 本文介绍如何使用FastAPI在AWS Elastic Kubernetes Service (EKS)上构建一个由多个微服务组成的AI问答系统。该系统能够接收用户输入的提示(prompt),通过调用其他微服务从AWS ElastiCache on Redis和Amazon DynamoDB获取相关上下文,然后利用AW…...