深入解析二维矩阵搜索:LeetCode 74与240题的两种高效解法对比
文章目录
- **引言**
- **一、问题背景与排序规则对比**
- **1. LeetCode 74. 搜索二维矩阵**
- **2. LeetCode 240. 搜索二维矩阵 II**
- **二、核心解法对比**
- **方法1:二分查找法(适用于LeetCode 74)**
- **方法2:线性缩小搜索范围法(适用于LeetCode 240)**
- **三、关键差异与适用场景**
- **四、为什么解法不能互换?**
- **1. 二分查找法在LeetCode 240中的失效示例**
- **2. 线性缩小法在LeetCode 74中的效率问题**
- **五、边界情况处理**
- **1. 空矩阵或空行**
- **2. 单元素矩阵**
- **3. 单行或单列矩阵**
- **六、总结与建议**
引言
在算法面试中,二维矩阵搜索问题频繁出现,其中 LeetCode 74. 搜索二维矩阵 和 LeetCode 240. 搜索二维矩阵 II 是两道经典的题目。尽管题目名称相似,但它们的矩阵排序规则和解题思路存在显著差异。本文将从问题本质出发,对比两种解法的核心思想、适用场景及实现细节,帮助读者深入理解并灵活应对类似问题。
一、问题背景与排序规则对比
1. LeetCode 74. 搜索二维矩阵
- 题目描述
在一个m x n的二维矩阵中,每一行元素严格递增,且下一行的第一个元素严格大于上一行的最后一个元素。要求判断目标值target是否存在于矩阵中。 - 排序特性
整个矩阵可以视为一个全局有序的一维数组,例如:
展开后为一维数组:[[1, 3, 5, 7],[10,11,16,20],[23,30,34,60]][1,3,5,7,10,11,16,20,23,30,34,60]。
2. LeetCode 240. 搜索二维矩阵 II
- 题目描述
在一个m x n的二维矩阵中,每一行元素从左到右递增,每一列元素从上到下递增,但行与行之间没有严格的大小关系。要求判断目标值是否存在。 - 排序特性
矩阵仅局部有序,无法直接展开为全局有序的一维数组,例如:[[1, 4, 7],[2, 5, 8],[3, 6, 9]]
二、核心解法对比
方法1:二分查找法(适用于LeetCode 74)
-
核心思想
将二维矩阵映射为一维数组,利用二分查找直接定位目标值。 -
时间复杂度
(O(\log(m \times n))),其中 (m) 为行数,(n) 为列数。 -
实现步骤
- 将二维索引映射为一维:
index = row * n + col。 - 通过一维索引的二分查找确定目标值的位置。
- 转换回二维索引进行值比较。
- 将二维索引映射为一维:
-
Java代码实现
class Solution {public boolean searchMatrix(int[][] matrix, int target) {if (matrix == null || matrix.length == 0 || matrix[0].length == 0) return false;int m = matrix.length, n = matrix[0].length;int left = 0, right = m * n - 1;while (left <= right) {int mid = left + (right - left) / 2;int row = mid / n; // 计算行坐标int col = mid % n; // 计算列坐标if (matrix[row][col] == target) {return true;} else if (matrix[row][col] < target) {left = mid + 1;} else {right = mid - 1;}}return false;} }
方法2:线性缩小搜索范围法(适用于LeetCode 240)
-
核心思想
从矩阵的右上角(或左下角)出发,通过逐步排除行或列缩小搜索范围。 -
时间复杂度
(O(m + n)),其中 (m) 为行数,(n) 为列数。 -
实现步骤
- 初始化位置为右上角
(0, n-1)。 - 若当前值等于目标值,返回
true。 - 若当前值大于目标值,向左移动一列;否则向下移动一行。
- 重复直至越界。
- 初始化位置为右上角
-
Java代码实现
class Solution {public boolean searchMatrix(int[][] matrix, int target) {if (matrix == null || matrix.length == 0 || matrix[0].length == 0) return false;int m = matrix.length, n = matrix[0].length;int row = 0, col = n - 1; // 从右上角开始搜索while (row < m && col >= 0) {int current = matrix[row][col];if (current == target) {return true;} else if (current > target) {col--; // 排除当前列} else {row++; // 排除当前行}}return false;} }
三、关键差异与适用场景
| 对比维度 | 二分查找法(LeetCode 74) | 线性缩小法(LeetCode 240) |
|---|---|---|
| 时间复杂度 | (O(\log(mn)))(对数级,高效) | (O(m + n))(线性级,适用于中等规模矩阵) |
| 空间复杂度 | (O(1))(原地操作) | (O(1))(原地操作) |
| 排序规则依赖 | 必须全局有序 | 仅需局部行列有序 |
| 适用题目 | 仅LeetCode 74 | 仅LeetCode 240(但LeetCode 74也可用) |
| 优势场景 | 大规模全局有序矩阵 | 局部有序或中等规模矩阵 |
四、为什么解法不能互换?
1. 二分查找法在LeetCode 240中的失效示例
- 矩阵示例
[[1, 3, 5],[2, 4, 6],[7, 8, 9] ] - 搜索目标:
2- 一维展开为
[1,3,5,2,4,6,7,8,9],二分查找时中间值可能跳过实际存在的元素,导致错误结果。
- 一维展开为
2. 线性缩小法在LeetCode 74中的效率问题
- 矩阵示例
[[1, 3, 5, 7],[10,11,16,20],[23,30,34,60] ] - 搜索目标:
60- 从右上角开始需遍历
7 → 20 → 60,时间复杂度为 (O(n)),而二分查找仅需 (O(\log 12) \approx 4) 次比较。
- 从右上角开始需遍历
五、边界情况处理
1. 空矩阵或空行
if (matrix == null || matrix.length == 0 || matrix[0].length == 0) return false;
2. 单元素矩阵
- 矩阵为
[[5]],目标值为5时直接返回true。
3. 单行或单列矩阵
- 单行矩阵
[[1,3,5]]或单列矩阵[[2],[4],[7]],两种方法均能正确处理。
六、总结与建议
-
LeetCode 74(全局有序)
- 优先选择二分查找法,时间复杂度更低,适合大规模数据。
- 若使用线性缩小法,虽然可行,但效率略低。
-
LeetCode 240(局部有序)
- 必须使用线性缩小法,二分查找法因全局无序可能失效。
- 从右上角或左下角出发均可,逻辑对称。
-
实际应用场景
- 数据库索引查询(全局有序场景)。
- 图像处理中的局部特征搜索(局部有序场景)。
通过深入理解矩阵的排序规则与算法特性,读者可以灵活选择最优解法,轻松应对二维矩阵搜索问题。无论是面试还是实际工程应用,清晰的思路和高效的代码实现都是解决问题的关键。
相关文章:

深入解析二维矩阵搜索:LeetCode 74与240题的两种高效解法对比
文章目录 **引言** **一、问题背景与排序规则对比****1. LeetCode 74. 搜索二维矩阵****2. LeetCode 240. 搜索二维矩阵 II** **二、核心解法对比****方法1:二分查找法(适用于LeetCode 74)****方法2:线性缩小搜索范围法࿰…...
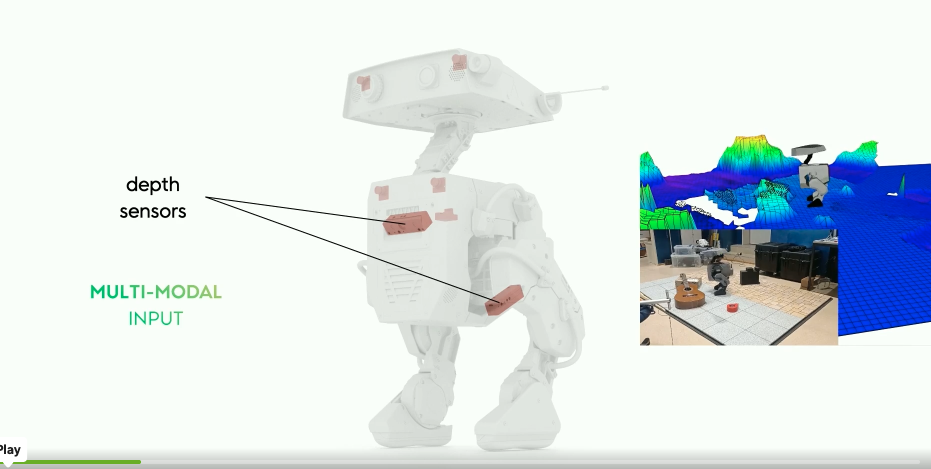
迪士尼机器人BD-X 概况
这些机器人代表着迪士尼故事叙述与非凡创新的完美结合。它们不仅栩栩如生,还配备了先进的技术。 -迪士尼幻想工程研发部高级副总裁凯尔劳克林 幕景 BDX 机器人是由华特迪士尼公司的研究和幻想工程部门利用NVIDIA人工智能技术 (AI)开发的现实世界机器人,…...
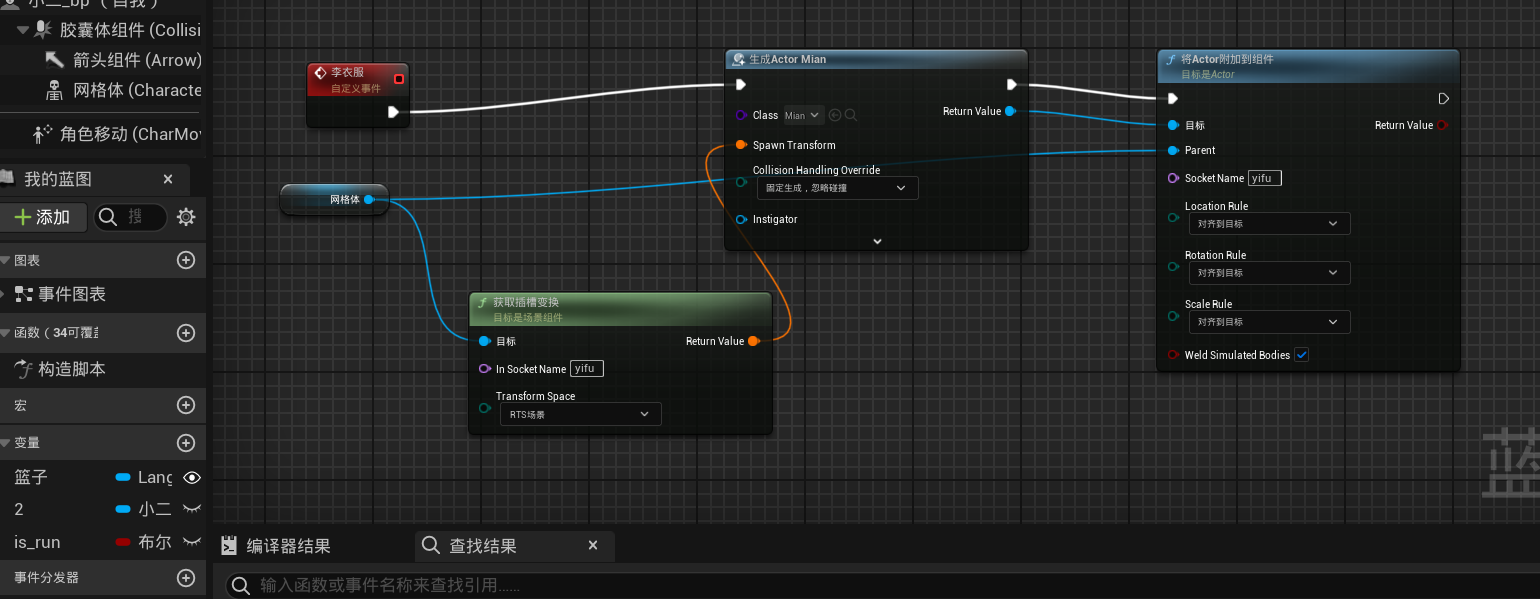
UE5骨骼插槽蓝图
首先在人物骨骼处添加插槽并命名,然后再选择添加预览资产把你要的模型(静态网格体)放上去。 选择绑定的骨骼再去右边相对位置、旋转等调整物体。 再去人物蓝图里面写就ok了...

移动应用开发:自定义 View 处理大量数据的性能与交互优化方案
实现 1 万条数据下流畅滑动与灵敏交互的完美平衡。 一、数据渲染优化:从 1 万条到丝滑体验 (一)视图复用机制 视图复用是提升大量数据渲染性能的关键策略。以一个简单的自定义列表视图为例,我们可以构建如下的复用池管理机制&a…...
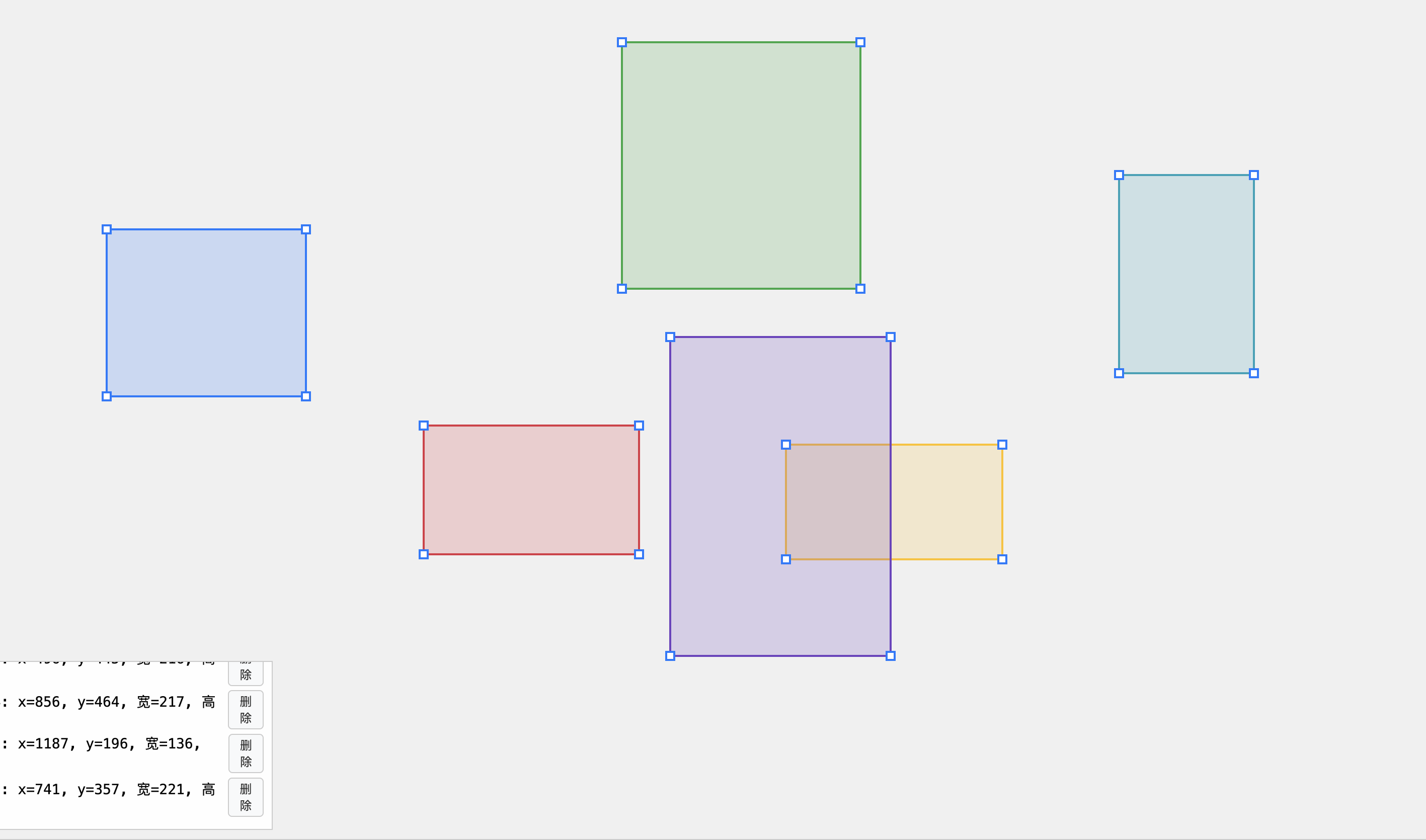
绘制拖拽html
<!DOCTYPE html> <html lang"zh-CN"> <head> <meta charset"UTF-8" /> <meta name"viewport" content"widthdevice-width, initial-scale1" /> <title>拖拽绘制矩形框 - 可移动可调整大小</ti…...

C++结构体介绍
结构体的定义 在C中,结构体(struct)是一种用户定义的数据类型,允许将不同类型的数据组合在一起。结构体的定义使用struct关键字,后跟结构体名称和一对花括号{},花括号内包含成员变量的声明。 struct Pers…...

ggplot2 | GO barplot with gene list
1. 效果图 2. 代码 数据是GO的输出结果,本文使用的是 metascape 输出的excel挑选的若干行。 # 1. 读取数据 datread.csv("E:\\research\\scPolyA-seq2\\GO-APA-Timepoint\\test.csv", sep"\t") head(dat)# 2. 选择所需要的列 dat.usedat[, c(…...

PostgreSQL 的 pg_advisory_lock 函数
PostgreSQL 的 pg_advisory_lock 函数 pg_advisory_lock 是 PostgreSQL 提供的一种应用级锁机制,它不锁定具体的数据库对象(如表或行),而是通过数字键值来协调应用间的并发控制。 锁的基本概念 PostgreSQL 提供两种咨询锁(advi…...
)
docker 镜像的导出和导入(导出完整镜像和导出容器快照)
一、导出原始镜像 1. 使用 docker save 导出完整镜像 适用场景:保留镜像的所有层、元数据、标签和历史记录,适合迁移或备份完整镜像环境。 操作命令 docker save -o <导出文件名.tar> <镜像名:标签>示例:docker save -o milvu…...

系统思考:短期困境与长期收益
最近在项目中,一直有学员会提到一个议题,如何平衡当前困境和长期收益? 我的思考是在商业和人生的路上,我们常常听到“鱼和熊掌不可兼得”的说法,似乎短期利益和长期目标注定是对立的。但事实上,鱼与熊掌是…...

4.2【LLaMA-Factory实战】金融财报分析系统:从数据到部署的全流程实践
【LLaMA-Factory实战】金融财报分析系统:从数据到部署的全流程实践 一、引言 在金融领域,财报分析是投资决策的核心环节。传统分析方法面临信息提取效率低、风险识别不全面等挑战。本文基于LLaMA-Factory框架,详细介绍如何构建一个专业的金…...
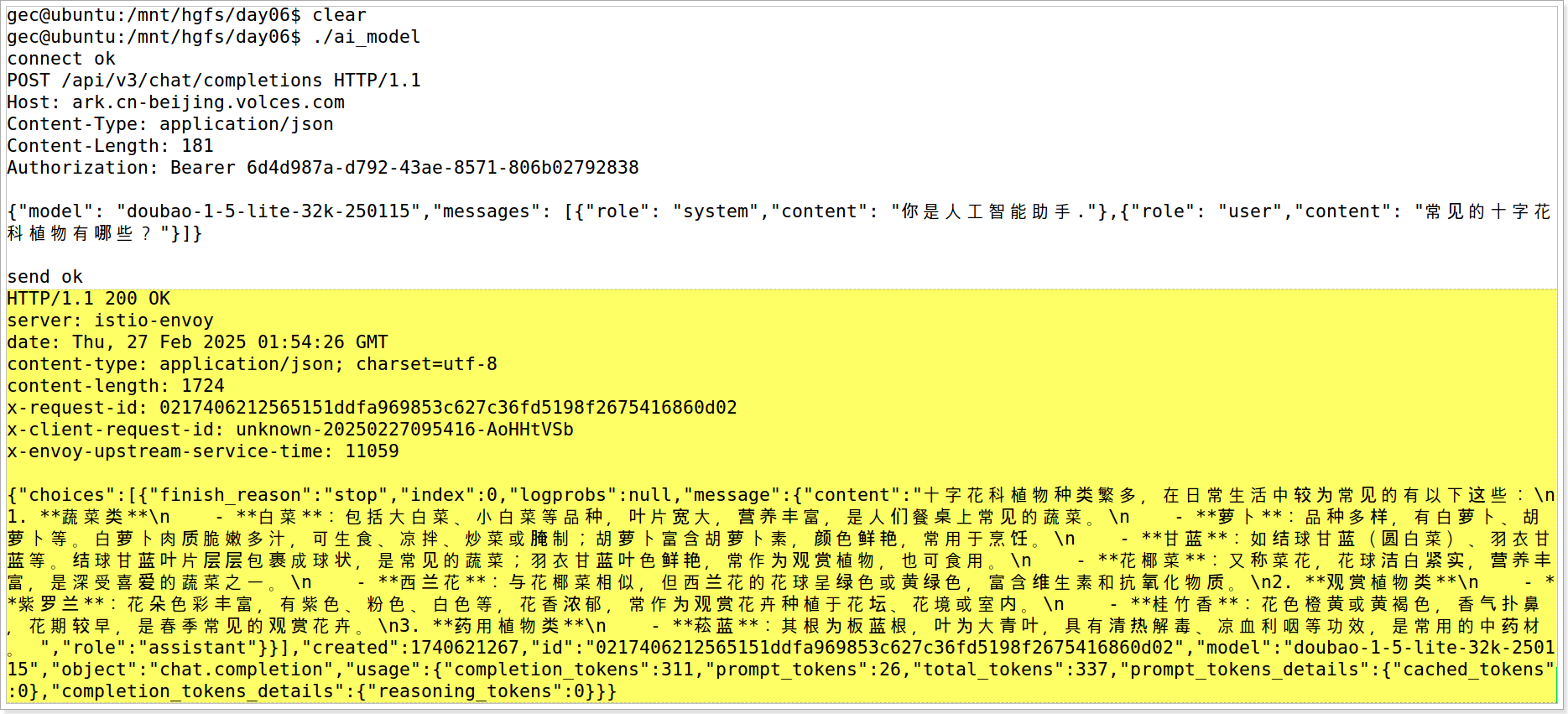
Cjson格式解析与接入AI大模型
JSON格式的解析与构造 基本概念 JSON是JavaScript Object Notation的简称,中文含义为“JavaScript 对象表示法”,它是一种数据交换的文本格式,而不是一种编程语言。 JSON 是一种轻量级的数据交换格式,采用完全独立于编程语言的…...
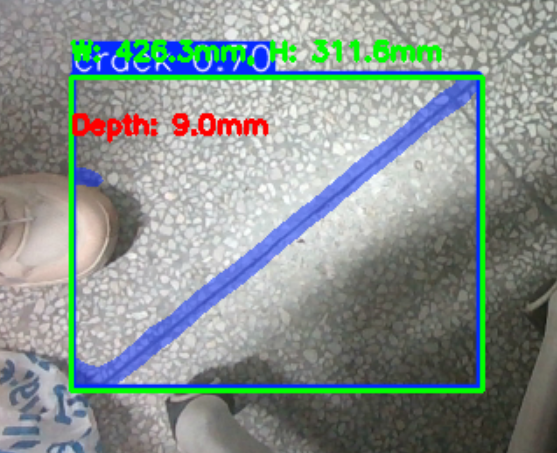
基于英特尔 RealSense D455 结构光相机实现裂缝尺寸以及深度测量
目录 一,相机参数规格 二,结合YOLO实例分割实现裂缝尺寸以及深度测量 2.1 应用场景 2.2 实现流程 2.3 效果展示 2.4 精度验证 2.5 实物裂缝尺寸以及深度测量效果展示 一,相机参数规格 英特尔 RealSense D455 是英特尔 RealSense D400 系…...
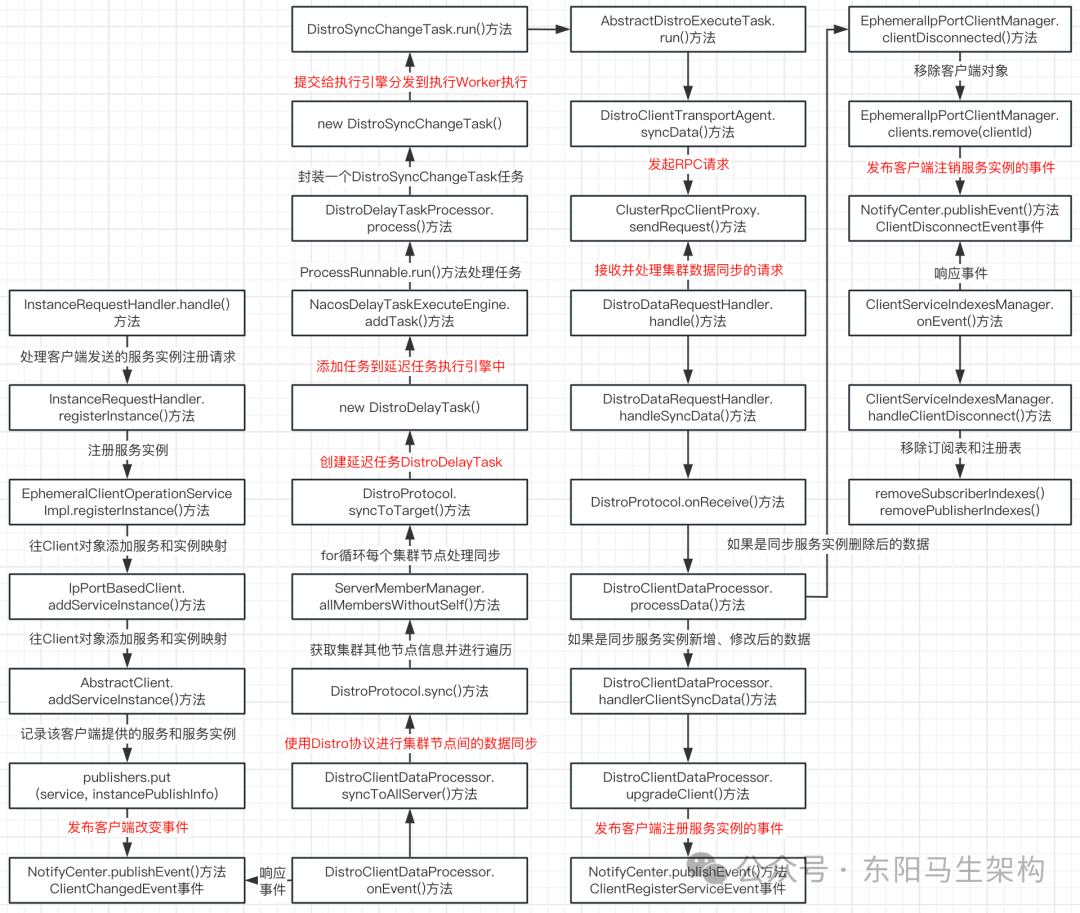
Nacos源码—7.Nacos升级gRPC分析四
大纲 5.服务变动时如何通知订阅的客户端 6.微服务实例信息如何同步集群节点 6.微服务实例信息如何同步集群节点 (1)服务端处理服务注册时会发布一个ClientChangedEvent事件 (2)ClientChangedEvent事件的处理源码 (3)集群节点处理数据同步请求的源码 (1)服务端处理服务注册…...

TIME - MoE 模型代码 3.2——Time-MoE-main/time_moe/datasets/time_moe_dataset.py
源码:GitHub - Time-MoE/Time-MoE: [ICLR 2025 Spotlight] Official implementation of "Time-MoE: Billion-Scale Time Series Foundation Models with Mixture of Experts" 这段代码定义了一个用于时间序列数据处理的 TimeMoEDataset 类,支…...
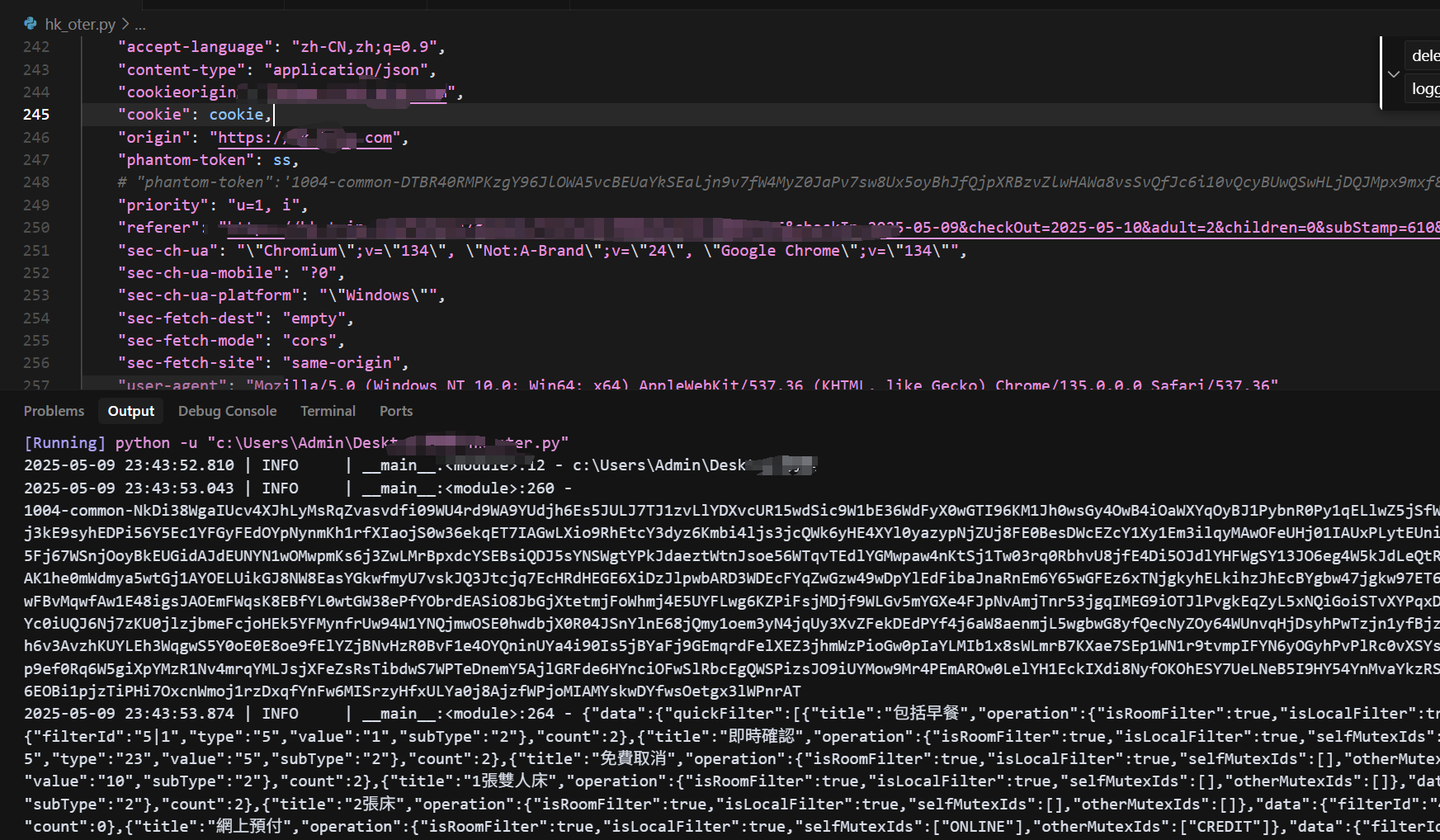
【某OTA网站】phantom-token 1004
新版1004 phantom-token 请求头中包含phantom-token 定位到 window.signature 熟悉的vmp 和xhs一样 最新环境检测点 最新检测 canvas 下的 toDataURL方法较严 过程中 会用setAttribute给canvas 设置width height 从而使toDataURL返回不同的值 如果写死toDataURL的返回值…...
OrangePi Zero 3学习笔记(Android篇)2 - 第一个C程序
目录 1. 创建项目文件夹 2. 创建c/cpp文件 3. 创建Android.mk/Android.bp文件 3.1 Android.mk 3.2 Android.bp 4. 编译 5. adb push 6. 打包到image中 在AOSP里面添加一个C或C程序,这个程序在Android中需要通过shell的方式运行。 1. 创建项目文件夹 首先需…...
DeepResearch深度搜索实现方法调研
DeepResearch深度搜索实现方法调研 Deep Research 有三个核心能力 能力一:自主规划解决问题的搜索路径(生成子问题,queries,检索)能力二:在探索路径时动态调整搜索方向(刘亦菲最好的一部电影是…...
)
使用大语言模型进行机器人规划(Robot planning with LLMs)
李升伟 编译 长期规划在机器人学领域可以从经典控制方法与大型语言模型在现实世界知识能力的结合中获益。 在20世纪80年代,机器人学和人工智能(AI)领域的专家提出了莫雷奇悖论,观察到人类看似简单的涉及移动和感知的任务&#x…...

【论文阅读】基于客户端数据子空间主角度的聚类联邦学习分布相似性高效识别
Efficient distribution similarity identification in clustered federated learning via principal angles between client data subspaces -- 基于客户端数据子空间主角度的聚类联邦学习分布相似性高效识别 论文来源TLDR背景与问题两个子空间之间的主角(Principa…...

Elasticsearch知识汇总之ElasticSearch部署
五 ElasticSearch部署 部署Elasticsearch,可以在任何 Linux、MacOS 或 Windows 机器上运行 Elasticsearch。在Docker 容器 中运行 Elasticsearch 。使用Elastic Cloud on Kubernetes 设置和管理 Elasticsearch、Kibana、Elastic Agent 以及 Kubernetes 上的 Elasti…...
ROBOVERSE:面向可扩展和可泛化机器人学习的统一平台、数据集和基准
25年4月来自UC Berkeley、北大、USC、UMich、UIUC、Stanford、CMU、UCLA 和 北京通用 AI 研究院(BIGAI)的论文“ROBOVERSE: Towards a Unified Platform, Dataset and Benchmark for Scalable and Generalizable Robot Learning”。 数据扩展和标准化评…...

LVGL的核心:lv_timer_handler
文章目录 🧠 一句话总结 LVGL 的运行核心:🔁 1. while(1) 主循环中的 lv_task_handler()⏱️ 2. lv_timer_handler() 定时器调度核心✅ 并发控制✅ 关键行为流程:🌀 任务执行逻辑:🧮 计算下一次…...

(41)VTK C++开发示例 ---qt使用vtk最小示例
文章目录 1. 概述2. CMake链接VTK3. main.cpp文件4. 演示效果 更多精彩内容👉内容导航 👈👉VTK开发 👈 1. 概述 本文演示了在Qt中使用VTK的最小示例程序,使用VTK创建显示一个锥体; 采用Cmake作为构建工具&a…...

⭐️⭐️⭐️【课时1:大模型是什么?】学习总结 ⭐️⭐️⭐️ for《大模型Clouder认证:基于百炼平台构建智能体应用》认证
一、学习目标 概要 通过学习《课时1:大模型是什么?》,全面了解大模型的基础概念、核心特点、发展脉络及阿里云在大模型领域的布局,为后续基于百炼平台构建智能体应用的实践操作打下坚实的理论基础。 具体目标列表 理解人工智能到大模型的演变逻辑,明确大模型在AI发展历…...
OS7.【Linux】基本指令入门(6)
目录 1.zip和unzip 配置指令 使用 两个名词:打包和压缩 打包 压缩 Linux下的操作演示 压缩和解压缩文件 压缩和解压缩目录 -d选项 2.tar Linux下的打包和压缩方案简介 czf选项 xzf选项 -C选项 tzf选项 3.bc 4.uname 不带选项的uname -a选项 -r选项 -v选项…...
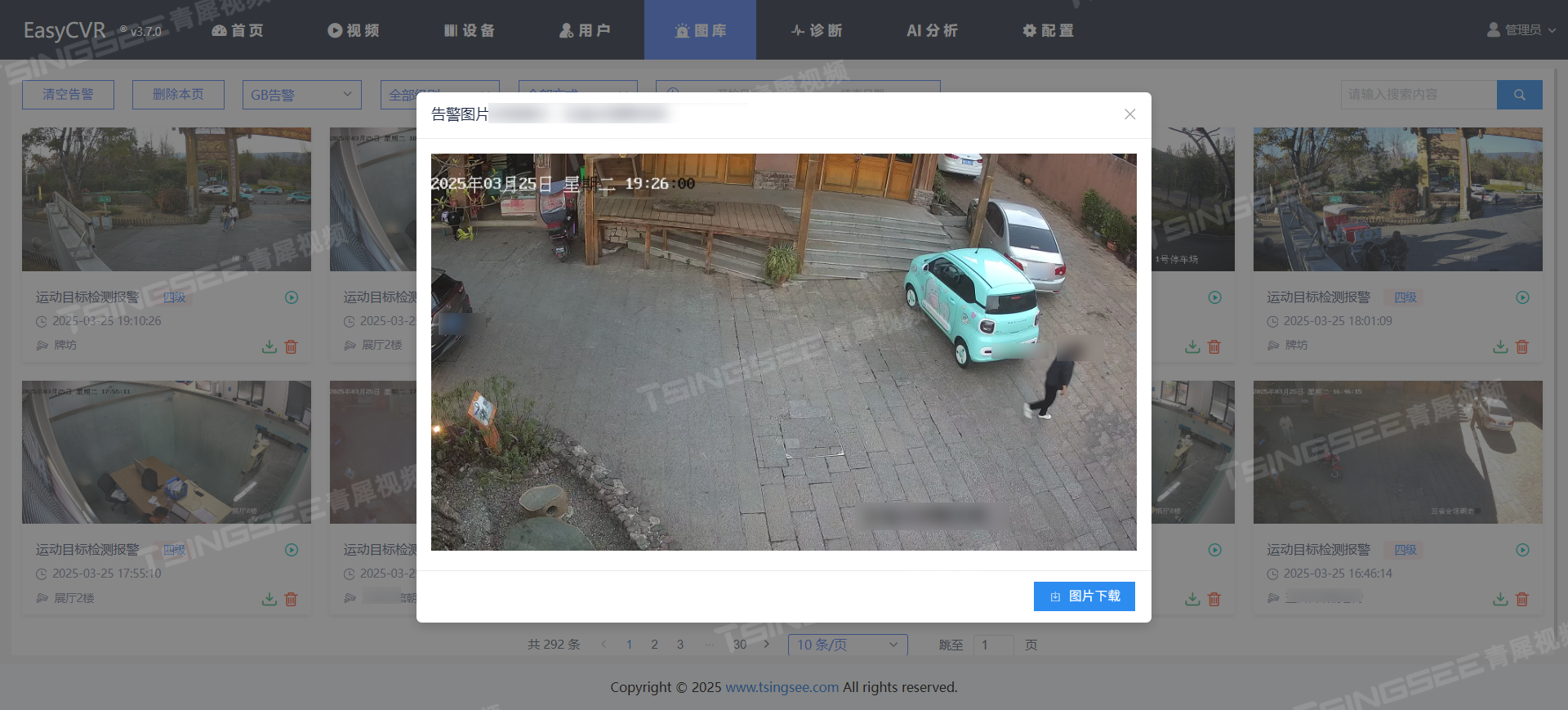
国标GB28181视频平台EasyCVR安防系统部署知识:如何解决异地监控集中管理和组网问题
在企业、连锁机构及园区管理等场景中,异地监控集中管控与快速组网需求日益迫切。弱电项目人员和企业管理者亟需整合分散监控资源,实现跨区域统一管理与实时查看。 一、解决方案 案例一:运营商专线方案 利用运营商专线,连接各分…...

O2O上门服务如何颠覆传统足浴行业?真实案例分析
在湖南经营传统足浴店的张总最近遇到了件让他哭笑不得的事。原本他的门店生意还算稳定,虽然这两年行情不好,但靠着老顾客还能勉强维持。可谁想到,一次好心帮忙,竟让他发现了行业的新天地。 几年前,张总的一位做砂石生意…...

金仓数据库永久增量备份技术原理与操作
先用一张图说明一下常见的备份方式 为什么需要永久增量备份 传统的数据库备份方案通常是间隔7天对数据库做一次全量备份(完整备份),每天会基于全量备份做一次增量备份,如此循环,这种备份方案在全备数据量过大场景下…...
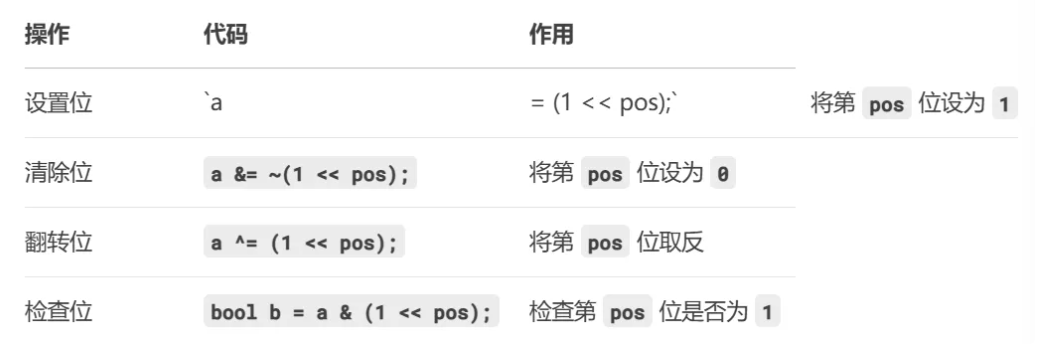
19、HashTable(哈希)、位图的实现和布隆过滤器的介绍
一、了解哈希【散列表】 1、哈希的结构 在STL中,HashTable是一个重要的底层数据结构, 无序关联容器包括unordered_set, unordered_map内部都是基于哈希表实现 哈希表又称散列表,一种以「key-value」形式存储数据的数据结构。哈希函数:负责将…...