关键点检测--使用YOLOv8对Leeds Sports Pose(LSP)关键点检测
目录
- 1. Leeds Sports Pose数据集下载
- 2. 数据集处理
- 2.1 获取标签
- 2.2 将图像文件和标签文件处理成YOLO能使用的格式
- 3. 用YOLOv8进行训练
- 3.1 训练
- 3.2 预测
1. Leeds Sports Pose数据集下载
从kaggle官网下载这个数据集,地址为link,下载好的数据集文件如下:
| |——archive
|——images 这个文件夹中放了2000张运动图像
|——visualized 这个文件夹放的是带关键点的图像
|——joints.mat 存放的是关键点标签
|——README.txt 存放对数据集的介绍
2. 数据集处理
2.1 获取标签
原图像的关键点标签以joints.mat格式存放,用python脚本对其进行解析,这里注意每张图像的大小不同,因此不同图像的宽高不同要注意。 解析代码如下,注意更换里面的图像路径。
import os
import cv2
import numpy as np
import scipy.io as sio# 加载 joints.mat 文件
mat_path = "joints.mat"
data = sio.loadmat(mat_path)# 查看所有键
print(data.keys())# 获取 joints 数据 (假设其结构为 (3, num_keypoints, num_samples))
joints = data['joints']# 路径配置
output_dir = r"LSP\labels"
image_dir = r"LSP\images" # 图像目录路径
os.makedirs(output_dir, exist_ok=True)# 解析 joints 数据
num_samples = joints.shape[2]for idx in range(num_samples):# 构建图像路径image_path = os.path.join(image_dir, f"im{idx + 1:04d}.jpg")# 检查图像是否存在if not os.path.exists(image_path):print(f"图像 {image_path} 不存在,跳过该样本。")continue# 获取当前样本的关键点数据keypoints = joints[:, :, idx]x_coords = keypoints[0, :]y_coords = keypoints[1, :]visibility = keypoints[2, :]# 读取图像获取实际尺寸img = cv2.imread(image_path)if img is None:print(f"无法读取图像 {image_path},跳过该样本。")continueimg_height, img_width = img.shape[:2]# 归一化关键点坐标x_coords /= img_widthy_coords /= img_height# 计算边界框x_min, x_max = np.min(x_coords), np.max(x_coords)y_min, y_max = np.min(y_coords), np.max(y_coords)bbox_width = x_max - x_minbbox_height = y_max - y_minx_center = x_min + bbox_width / 2y_center = y_min + bbox_height / 2# 构建标签行:class_id x_center y_center width height x1 y1 x2 y2 ...label = f"0 {x_center:.6f} {y_center:.6f} {bbox_width:.6f} {bbox_height:.6f} "label += " ".join([f"{x:.6f} {y:.6f}" for x, y in zip(x_coords, y_coords)])label += "\n"# 保存标签文件label_path = os.path.join(output_dir, f"im{idx + 1:04d}.txt")with open(label_path, "w") as f:f.write(label)print(f"所有关键点数据已转换为 YOLOv8 格式,保存至 {output_dir}")
获取的关键点标签如下图:
对应的图像如下图:

2.2 将图像文件和标签文件处理成YOLO能使用的格式
我是按照8比2将数据集分成训练集和测试集,划分代码如下:
import os
import random
import shutil# 数据集路径images_path = r"LSP\images"
labels_path = r"LSP\labels"# 输出路径
train_img_dir = os.path.join(images_path, "train")
val_img_dir = os.path.join(images_path, "val")
train_lbl_dir = os.path.join(labels_path, "train")
val_lbl_dir = os.path.join(labels_path, "val")# 创建输出文件夹
os.makedirs(train_img_dir, exist_ok=True)
os.makedirs(val_img_dir, exist_ok=True)
os.makedirs(train_lbl_dir, exist_ok=True)
os.makedirs(val_lbl_dir, exist_ok=True)# 获取所有图像文件名(不带扩展名)
image_files = sorted([f.split('.')[0] for f in os.listdir(images_path) if f.endswith('.jpg')])# 设置划分比例
train_ratio = 0.8
val_ratio = 0.2# 随机打乱文件列表
random.shuffle(image_files)# 划分数据集
train_count = int(len(image_files) * train_ratio)
train_files = image_files[:train_count]
val_files = image_files[train_count:]def move_files(file_list, img_dir, lbl_dir):for filename in file_list:img_src = os.path.join(images_path, f"{filename}.jpg")lbl_src = os.path.join(labels_path, f"{filename}.txt")img_dst = os.path.join(img_dir, f"{filename}.jpg")lbl_dst = os.path.join(lbl_dir, f"{filename}.txt")if os.path.exists(img_src) and os.path.exists(lbl_src):shutil.move(img_src, img_dst)shutil.move(lbl_src, lbl_dst)# 移动文件
move_files(train_files, train_img_dir, train_lbl_dir)
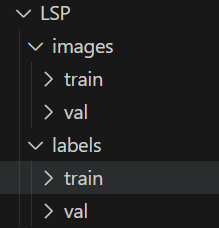
move_files(val_files, val_img_dir, val_lbl_dir)print(f"数据集划分完成:\n 训练集:{len(train_files)} 张\n 验证集:{len(val_files)} 张")划分后的文件格式图:
| | |——LSP 文件名
| |——images
|——train 训练数据
|——val 测试数据
| |——val
|——train 训练标签
|——val 测试标签
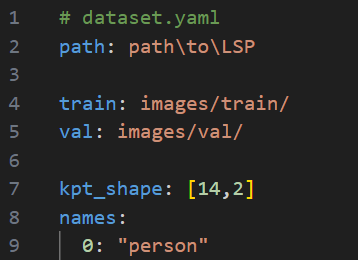
数据集的yaml格式如下:
3. 用YOLOv8进行训练
3.1 训练
下面是我进行训练的代码
# Ultralytics YOLO 🚀, AGPL-3.0 licensefrom copy import copyfrom ultralytics.models import yolo
from ultralytics.nn.tasks import PoseModel
from ultralytics.utils import DEFAULT_CFG, LOGGER
from ultralytics.utils.plotting import plot_images, plot_resultsclass PoseTrainer(yolo.detect.DetectionTrainer):"""A class extending the DetectionTrainer class for training based on a pose model.Example:```pythonfrom ultralytics.models.yolo.pose import PoseTrainerargs = dict(model='yolov8n-pose.pt', data='coco8-pose.yaml', epochs=3)trainer = PoseTrainer(overrides=args)trainer.train()```"""def __init__(self, cfg=DEFAULT_CFG, overrides=None, _callbacks=None):"""Initialize a PoseTrainer object with specified configurations and overrides."""if overrides is None:overrides = {}overrides["task"] = "pose"super().__init__(cfg, overrides, _callbacks)if isinstance(self.args.device, str) and self.args.device.lower() == "mps":LOGGER.warning("WARNING ⚠️ Apple MPS known Pose bug. Recommend 'device=cpu' for Pose models. ""See https://github.com/ultralytics/ultralytics/issues/4031.")def get_model(self, cfg=None, weights=None, verbose=True):"""Get pose estimation model with specified configuration and weights."""model = PoseModel(cfg, ch=3, nc=self.data["nc"], data_kpt_shape=self.data["kpt_shape"], verbose=verbose)if weights:model.load(weights)return modeldef set_model_attributes(self):"""Sets keypoints shape attribute of PoseModel."""super().set_model_attributes()self.model.kpt_shape = self.data["kpt_shape"]def get_validator(self):"""Returns an instance of the PoseValidator class for validation."""self.loss_names = "box_loss", "pose_loss", "kobj_loss", "cls_loss", "dfl_loss"return yolo.pose.PoseValidator(self.test_loader, save_dir=self.save_dir, args=copy(self.args), _callbacks=self.callbacks)def plot_training_samples(self, batch, ni):"""Plot a batch of training samples with annotated class labels, bounding boxes, and keypoints."""images = batch["img"]kpts = batch["keypoints"]cls = batch["cls"].squeeze(-1)bboxes = batch["bboxes"]paths = batch["im_file"]batch_idx = batch["batch_idx"]plot_images(images,batch_idx,cls,bboxes,kpts=kpts,paths=paths,fname=self.save_dir / f"train_batch{ni}.jpg",on_plot=self.on_plot,)def plot_metrics(self):"""Plots training/val metrics."""plot_results(file=self.csv, pose=True, on_plot=self.on_plot) # save results.pngif __name__ == "__main__":args = dict(model=r'E:\postgraduate\bolt_lossen_project\ultralytics-8.1.0\yolov8n-pose.pt', epochs= 100, mode='train')trains = PoseTrainer(overrides=args)trains.train()#predictor.predict_cli()
3.2 预测
预测代码:
# Ultralytics YOLO 🚀, AGPL-3.0 licensefrom ultralytics.engine.results import Results
from ultralytics.models.yolo.detect.predict import DetectionPredictor
from ultralytics.utils import DEFAULT_CFG, LOGGER, ops
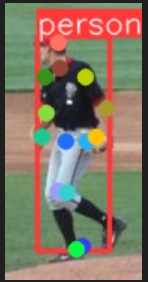
import cv2class PosePredictor(DetectionPredictor):"""A class extending the DetectionPredictor class for prediction based on a pose model.Example:```pythonfrom ultralytics.utils import ASSETSfrom ultralytics.models.yolo.pose import PosePredictorargs = dict(model='yolov8n-pose.pt', source=ASSETS)predictor = PosePredictor(overrides=args)predictor.predict_cli()```"""def __init__(self, cfg=DEFAULT_CFG, overrides=None, _callbacks=None):"""Initializes PosePredictor, sets task to 'pose' and logs a warning for using 'mps' as device."""super().__init__(cfg, overrides, _callbacks)self.args.task = "pose"if isinstance(self.args.device, str) and self.args.device.lower() == "mps":LOGGER.warning("WARNING ⚠️ Apple MPS known Pose bug. Recommend 'device=cpu' for Pose models. ""See https://github.com/ultralytics/ultralytics/issues/4031.")def postprocess(self, preds, img, orig_imgs):"""Return detection results for a given input image or list of images."""preds = ops.non_max_suppression(preds,self.args.conf,self.args.iou,agnostic=self.args.agnostic_nms,max_det=self.args.max_det,classes=self.args.classes,nc=len(self.model.names),)if not isinstance(orig_imgs, list): # input images are a torch.Tensor, not a listorig_imgs = ops.convert_torch2numpy_batch(orig_imgs)results = []for i, pred in enumerate(preds):orig_img = orig_imgs[i]pred[:, :4] = ops.scale_boxes(img.shape[2:], pred[:, :4], orig_img.shape).round()pred_kpts = pred[:, 6:].view(len(pred), *self.model.kpt_shape) if len(pred) else pred[:, 6:]pred_kpts = ops.scale_coords(img.shape[2:], pred_kpts, orig_img.shape)img_path = self.batch[0][i]results.append(Results(orig_img, path=img_path, names=self.model.names, boxes=pred[:, :6], keypoints=pred_kpts))return resultsif __name__ == "__main__":img = r'E:\postgraduate\bolt_lossen_project\ultralytics-8.1.0\archive\LSP\images\train\im0089.jpg'args = dict(model=r'E:\postgraduate\bolt_lossen_project\ultralytics-8.1.0\runs\pose\train\weights\best.pt', source=img, task = 'pose')predictor = PosePredictor(overrides=args)predictor.predict_cli()预测结果图:
相关文章:
关键点检测--使用YOLOv8对Leeds Sports Pose(LSP)关键点检测
目录 1. Leeds Sports Pose数据集下载2. 数据集处理2.1 获取标签2.2 将图像文件和标签文件处理成YOLO能使用的格式 3. 用YOLOv8进行训练3.1 训练3.2 预测 1. Leeds Sports Pose数据集下载 从kaggle官网下载这个数据集,地址为link,下载好的数据集文件如下…...

Elasticsearch内存管理与JVM优化:原理剖析与最佳实践
#作者:孙德新 文章目录 一、Elasticsearch缓存分类1、Node Query Cache:2、Shard Request Cache:3、Fielddata Cache: 三、内存常见的问题案例一案例二案例三案例四 四、内参分配最佳实践1、jvm heap分配2、将机器上少于一半的内…...
独立按键控制LED
目录 1.独立按键介绍 2.原理图 3.C51数据运输 解释:<< >> 编辑 解释:& | 解释:^ ~ 编辑 4.C51基本语句 5.按键的跳动 6.独立按键控制LED亮灭代码 第一步: 第二步: 第三步࿱…...
计算机科技笔记: 容错计算机设计03 系统可信性的度量 偶发故障期 浴盆曲线 韦布尔分布
可靠性 简化表达式 偶发故障期,系统发生故障概率趋近于一个常数 浴盆曲线 MTTF和计算 韦布尔分布 马尔可夫链 可靠度...
爬虫准备前工作
1.Pycham的下载 网址:PyCharm: The only Python IDE you need 2.Python的下载 网址:python.org(python3.9版本之后都可以) 3.node.js的下载 网址:Node.js — 在任何地方运行 JavaScript(版本使用18就可…...
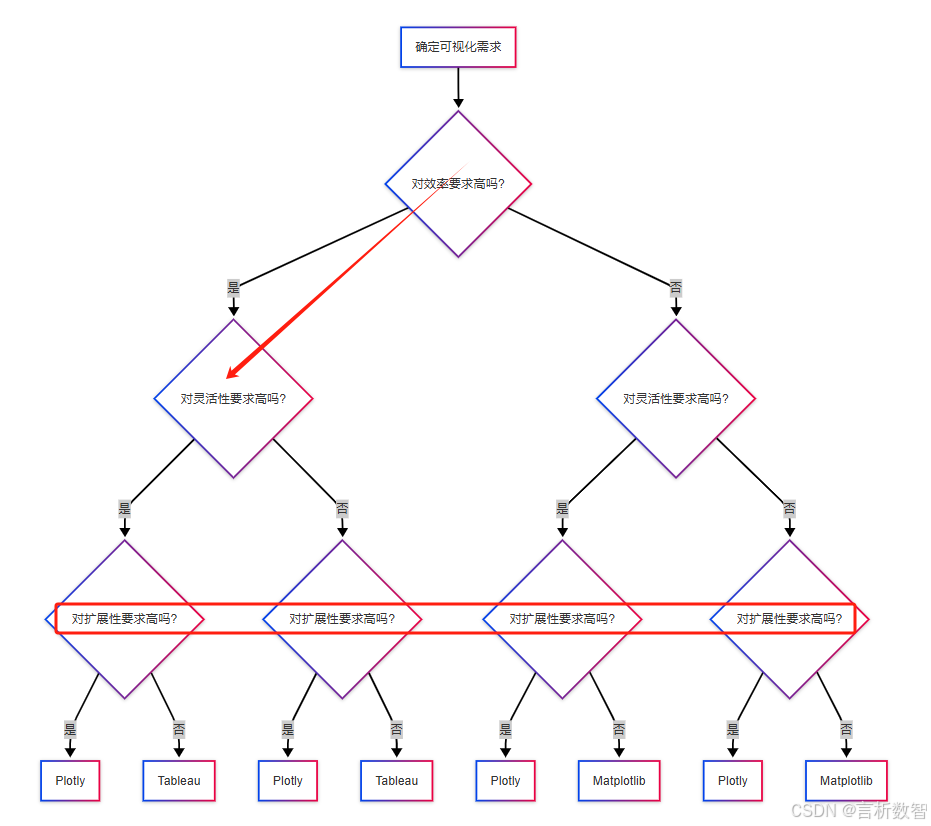
【PostgreSQL数据分析实战:从数据清洗到可视化全流程】7.1 主流可视化工具对比(Tableau/Matplotlib/Python库)
👉 点击关注不迷路 👉 点击关注不迷路 👉 点击关注不迷路 文章大纲 第七章 可视化工具集成:Tableau、Matplotlib与Python库深度对比7.1 主流可视化工具对比:技术选型的决策框架7.1.1 工具定位与核心能力矩阵7.1.2 数据…...
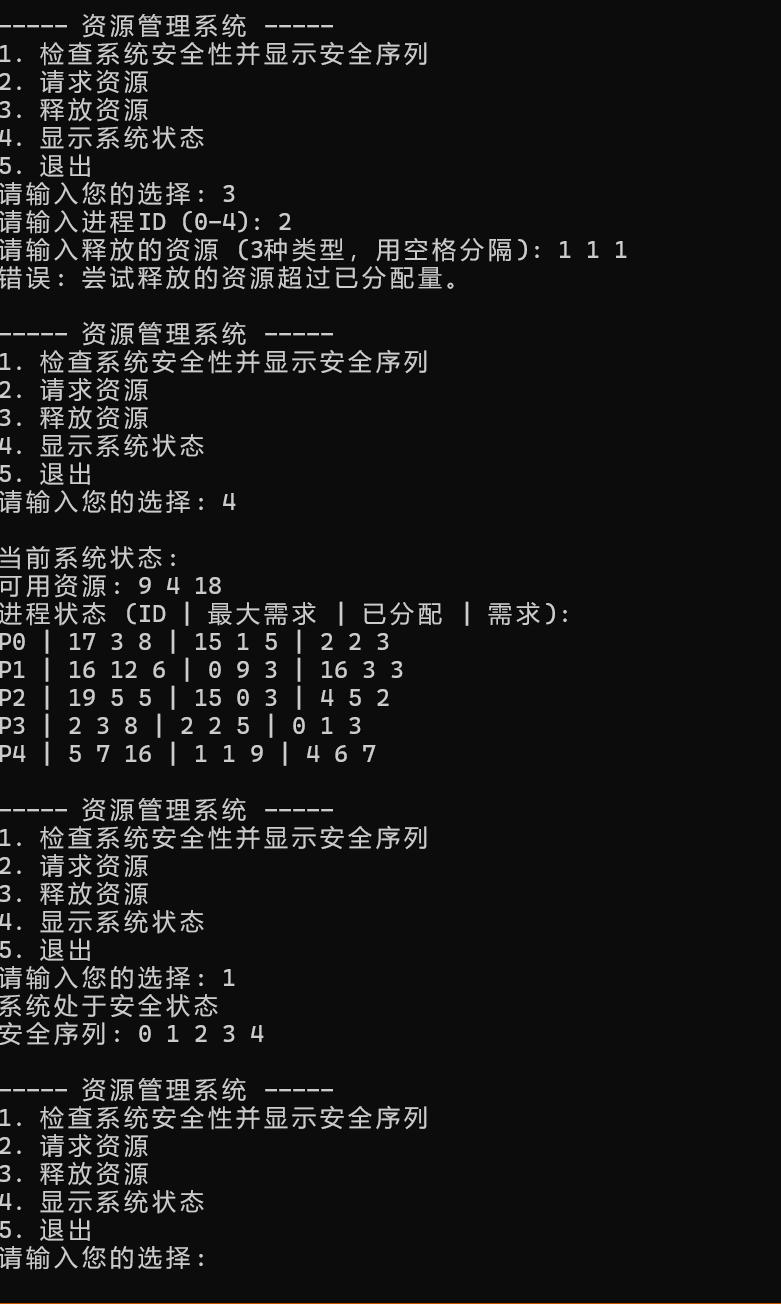
操作系统实验习题解析 上篇
孤村落日残霞,轻烟老树寒鸦,一点飞鸿影下。 青山绿水,白草红叶黄花。 ————《天净沙秋》 白朴 【元】 目录 实验一: 代码: 解析: 运行结果: 实验二: 代码解析 1. 类设计 …...

复习javascript
1.修改元素内的内容 <div>zsgh</div> <script> const box1document.querySelector("div") box1.innerText"ppp" box1.innerHtml<h1>修改</h1> </script> 2.随机点名练习 <!DOCTYPE html> <html lang…...
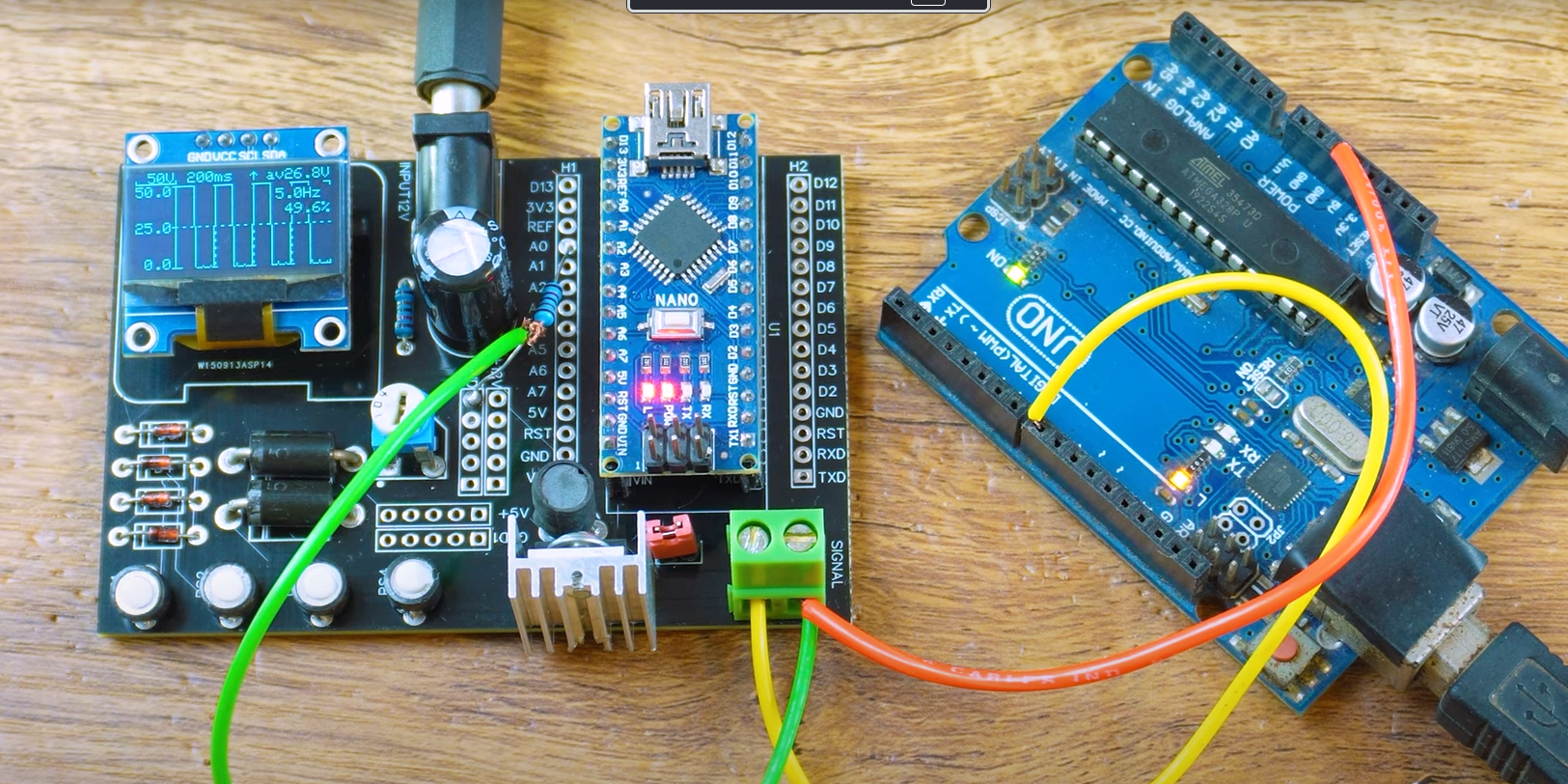
基于Arduino Nano的DIY示波器
基于Arduino Nano的DIY示波器:打造属于你的口袋实验室 前言 在电子爱好者的世界里,示波器是不可或缺的工具之一。它能够帮助我们观察和分析各种电子信号的波形,从而更好地理解和调试电路。然而,市面上的示波器价格往往较高&…...
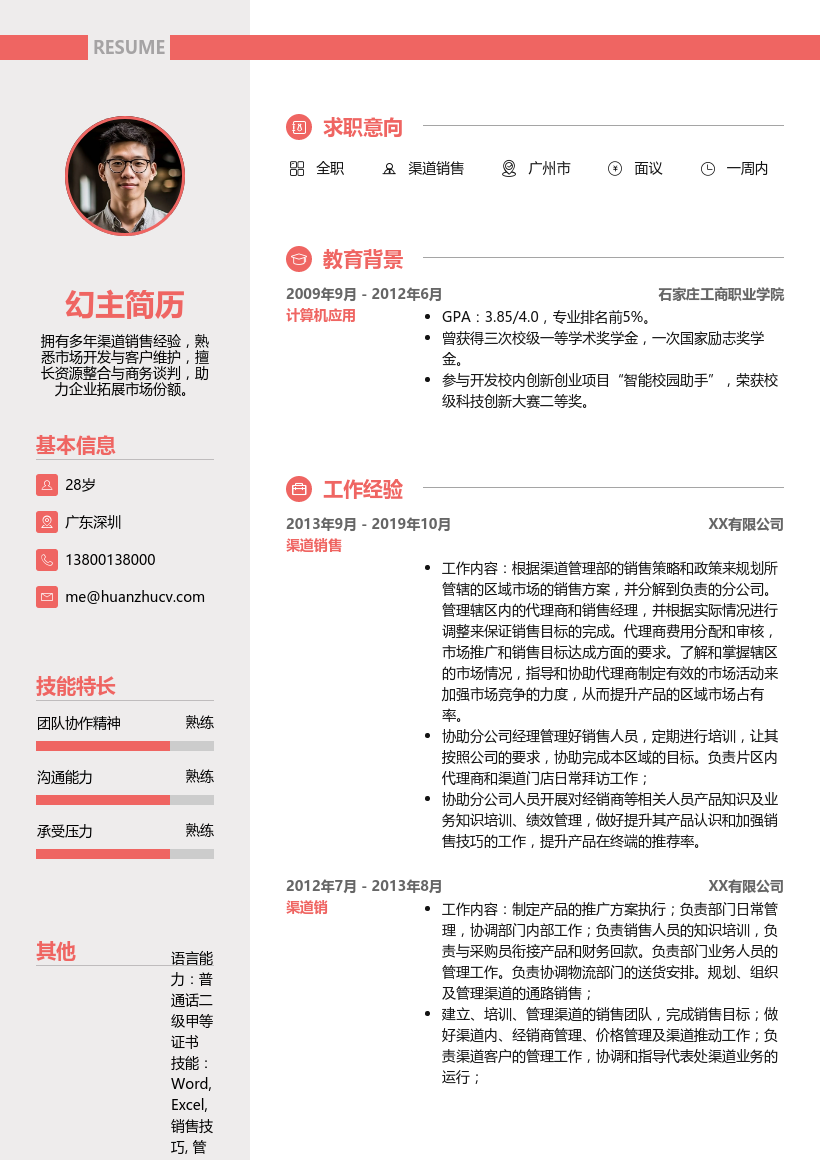
渠道销售简历模板范文
模板信息 简历范文名称:渠道销售简历模板范文,所属行业:其他 | 职位,模板编号:KRZ3J3 专业的个人简历模板,逻辑清晰,排版简洁美观,让你的个人简历显得更专业,找到好工作…...
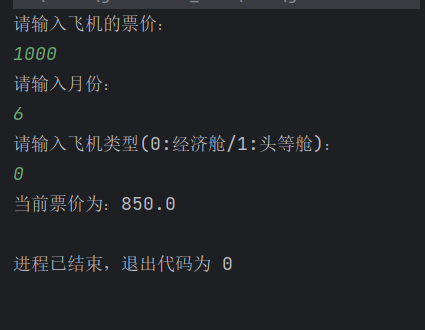
JAVA练习题(1) 卖飞机票
import java.util.Scanner; public class Main {public static void main(String[] args) {Scanner scnew Scanner(System.in);System.out.println("请输入飞机的票价:");int pricesc.nextInt();System.out.println("请输入月份:");…...
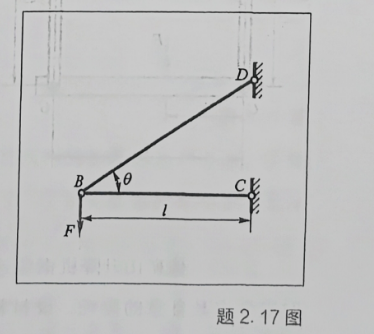
杆件的拉伸与压缩变形
杆件的拉伸与压缩 第一题 Q u e s t i o n \mathcal{Question} Question 图示拉杆沿斜截面 m − m m-m m−m由两部分胶合而成。设在胶合面上许用拉应力 [ σ ] 100 MPa [\sigma]100\text{MPa} [σ]100MPa,许用切应力 [ τ ] 50 MPa [\tau]50\text{MPa} [τ]50MP…...

深入解析Vue3中ref与reactive的区别及源码实现
深入解析Vue3中ref与reactive的区别及源码实现 前言 Vue3带来了全新的响应式系统,其中ref和reactive是最常用的两个API。本文将从基础使用、核心区别到源码实现,由浅入深地分析这两个API。 一、基础使用 1. ref import { ref } from vueconst count…...

Makefile中 链接库,同一个库的静态库与动态库都链接了,生效的是哪个库
Makefile中 链接库,同一个库的静态库与动态库都链接了,生效的是哪个库 在 Makefile 中同时链接同一个库的静态库(.a)和动态库(.so)时,具体哪个库生效取决于链接顺序和编译器行为。以下是详细分析…...

企业开发平台大变革:AI 代理 + 平台工程重构数字化转型路径
在企业数字化转型的浪潮中,开发平台正经历着前所未有的技术革命。从 AST(抽象语法树)到 AI 驱动的智能开发,从微服务架构到信创适配,这场变革不仅重塑了软件开发的底层逻辑,更催生了全新的生产力范式。本文…...

《汽车噪声控制》复习重点
题型 选择 填空 分析 计算 第一章 噪声定义 不需要的声音,妨碍正常工作、学习、生活,危害身体健康的声音,统称为噪声 噪声污染 与大气污染、水污染并称现代社会三大公害 声波基本概念 定义 媒质质点的机械振动由近及远传播&am…...

Linux——MySQL约束与查询
表的约束 真正约束字段的是数据类型,但是数据类型约束很单一,需要有一些额外的约束,更好的保证数据的合 法性,从业务逻辑角度保证数据的正确性。比如有一个字段是email,要求是唯一的。 表的约束是为了防止插入不合法的…...
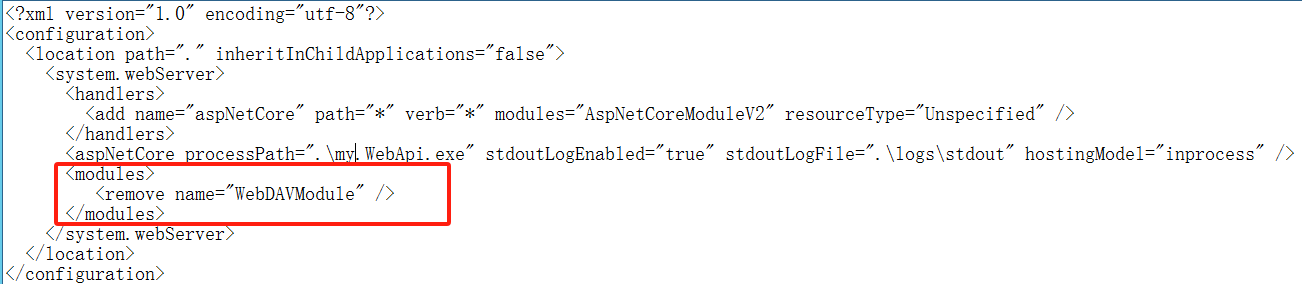
Asp.Net Core IIS发布后PUT、DELETE请求错误405
一、方案1 1、IIS管理器,处理程序映射。 2、找到aspNetCore,双击。点击请求限制...按钮,并在谓词选项卡上,添加两者DELETE和PUT. 二、方案2 打开web.config文件,添加<remove name"WebDAVModule" />&…...
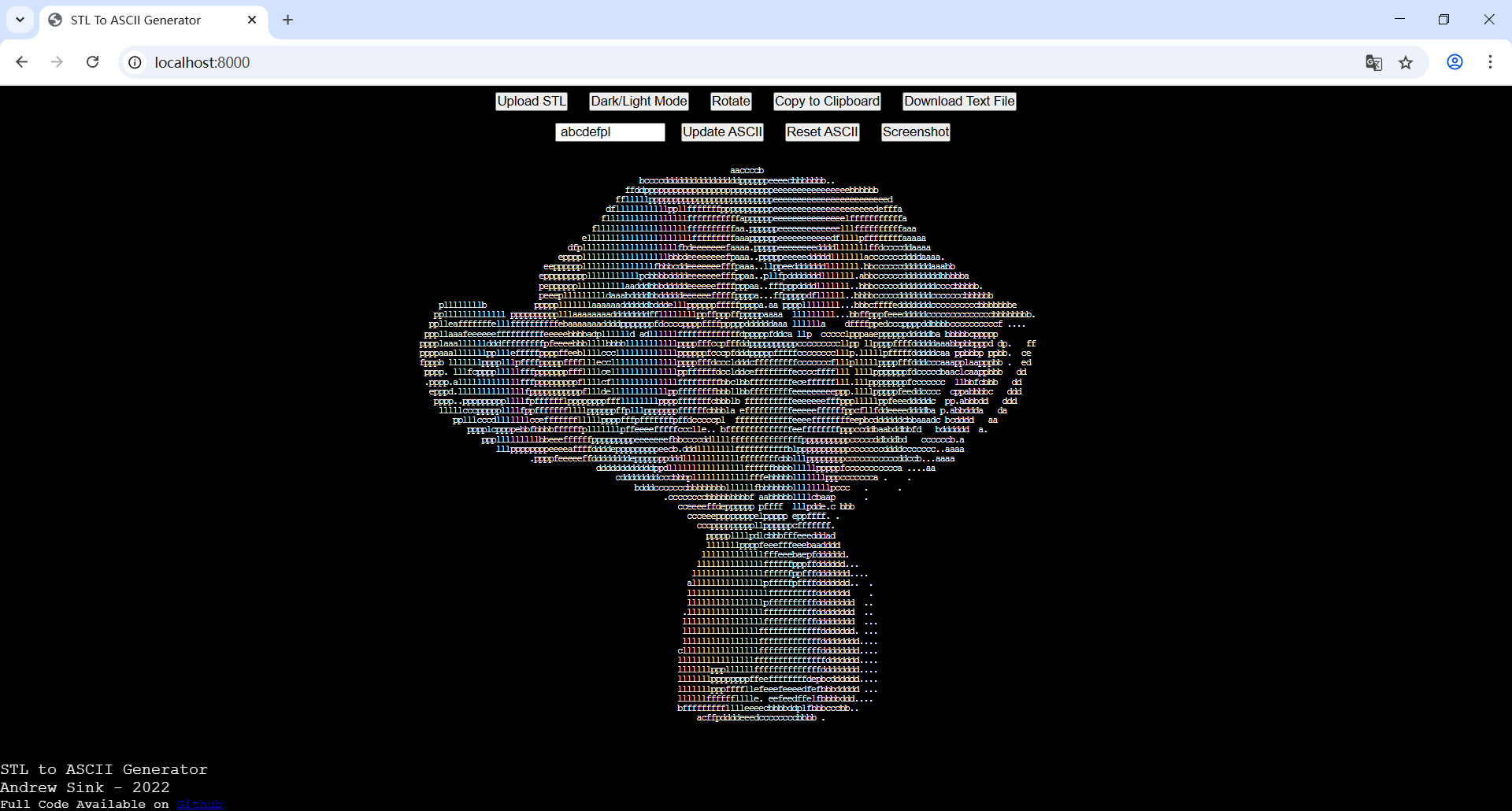
STL-to-ASCII-Generator 实用教程
参阅:STL-to-ASCII-Generator 使用教程 开源项目网址 下载 STL-to-ASCII-Generator-main.zip 解压到 D:\js\ index.html 如下 <!DOCTYPE html> <html lang"en"><head><meta charset"UTF-8"><meta id"ascii&q…...

关于数据库查询速度优化
本人接手了一个关于项目没有任何文档信息的代码,代码也没有相关文档说明信息!所以在做数据库查询优化的时候不敢改动。 原因1: 老板需要我做一个首页的统计查询。明明才几十万条数据,而且我加了筛选条件为什么会这么慢ÿ…...

sql serve 多表联合查询,根据一个表字段值动态改变查询条件
在SQL Server中进行多表联合查询时,如果需要根据一个表的字段值动态改变查询条件,可以采用几种不同的方法来实现这一需求。这里介绍两种常用的方法:CASE表达式和动态SQL。 方法1: 使用 CASE 表达式 这种方法适合于查询条件可以在单个SQL语句…...

巡检机器人数据处理技术的创新与实践
摘要 随着科技的飞速发展,巡检机器人在各行业中逐渐取代人工巡检,展现出高效、精准、安全等显著优势。当前,巡检机器人已从单纯的数据采集阶段迈向对采集数据进行深度分析的新阶段。本文探讨了巡检机器人替代人工巡检的现状及优势,…...
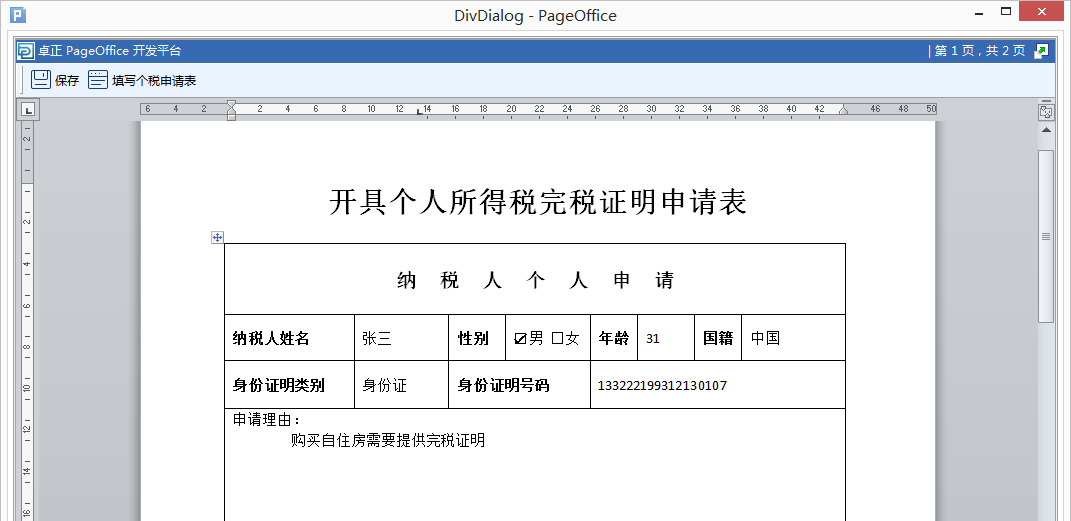
国产linux系统(银河麒麟,统信uos)使用 PageOffice 在线打开Word文件,并用前端对话框实现填空填表
不管是政府机关、公司企业,还是金融行业、教育行业等单位,在办公过程中都经常需要填写各种文书和表格,比如通知、报告、登记表、计划表、申请表等。这些文书和表格往往是用Word文件制作的模板,比方说一个通知模板中经常会有“关于…...

Kubernetes应用发布方式完整流程指南
Kubernetes(K8s)作为容器编排领域的核心工具,其应用发布流程体现了自动化、弹性和可观测性的优势。本文将通过一个Tomcat应用的示例,详细讲解从配置编写到高级发布的完整流程,帮助开发者掌握Kubernetes应用部署的核心步…...

视频编解码学习8之视频历史
视频技术的发展历史可以追溯到19世纪,至今已跨越近200年。以下是视频技术发展的主要阶段和里程碑: 1. 早期探索阶段(19世纪-1920年代) 1832年:约瑟夫普拉托(Joseph Plateau)发明"费纳奇镜&…...

RabbitMQ-高级特性1
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言消息确认机制介绍手动确认方法代码前言代码编写消息确认机制的演示自动确认automanual 持久化介绍交换机持久化队列持久化消息持久化 持久化代码持久化代码演示…...
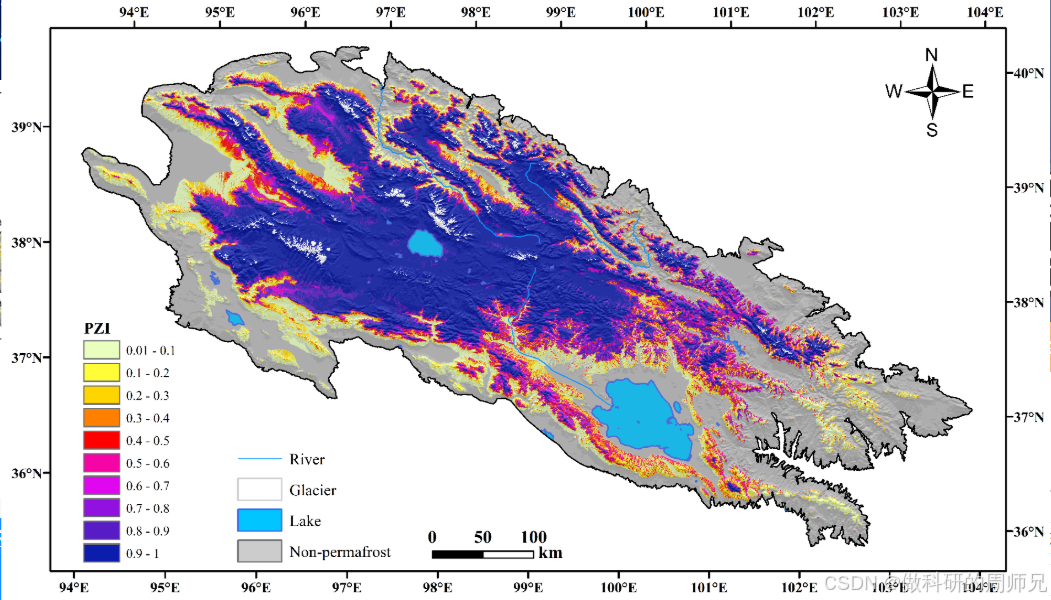
青藏高原东北部祁连山地区250m分辨率多年冻土空间分带指数图(2023)
时间分辨率:10年 < x < 100年空间分辨率:100m - 1km共享方式:开放获取数据大小:24.38 MB数据时间范围:近50年来元数据更新时间:2023-10-08 数据集摘要 多年冻土目前正在经历大规模的退化,…...

论文分享➲ arXiv2025 | TTRL: Test-Time Reinforcement Learning
TTRL: Test-Time Reinforcement Learning TTRL:测试时强化学习 https://github.com/PRIME-RL/TTRL 📖导读:本篇博客有🦥精读版、🐇速读版及🤔思考三部分;精读版是全文的翻译,篇幅较…...
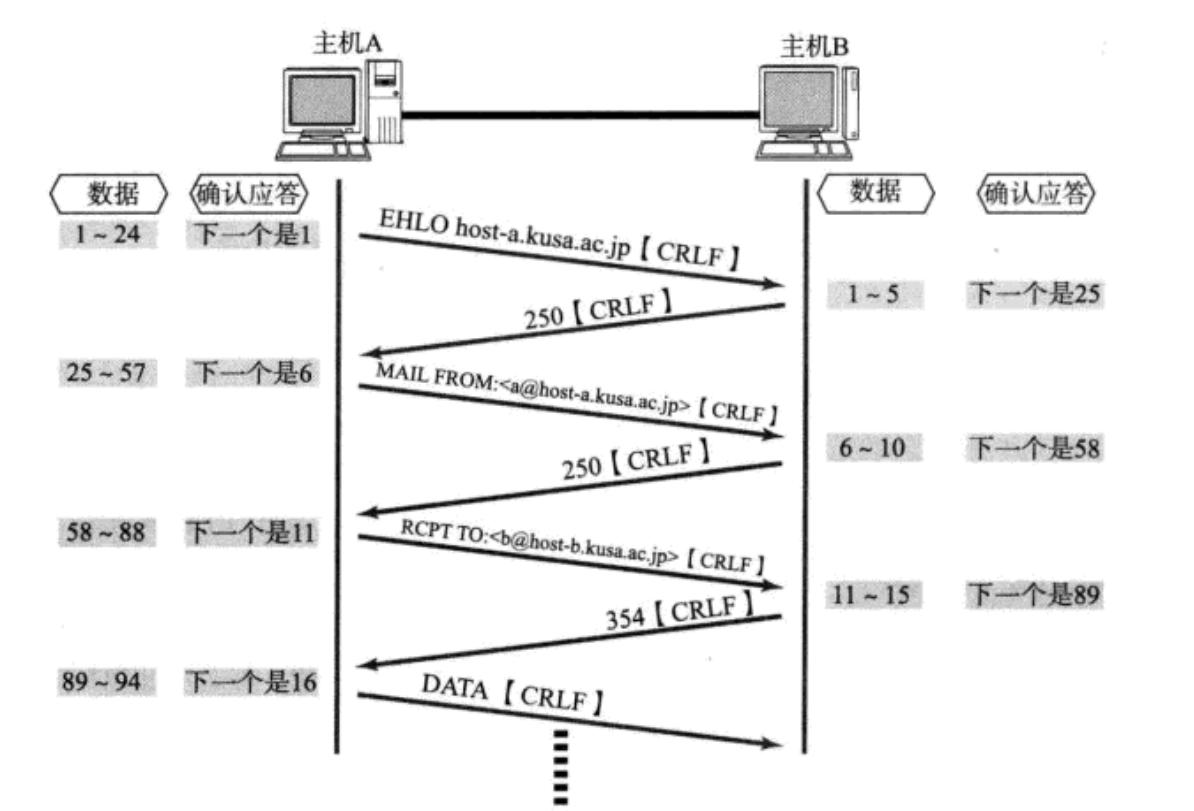
【计算机网络-传输层】传输层协议-TCP核心机制与可靠性保障
📚 博主的专栏 🐧 Linux | 🖥️ C | 📊 数据结构 | 💡C 算法 | 🅒 C 语言 | 🌐 计算机网络 上篇文章:传输层协议-UDP 下篇文章: 网络层 我们的讲解顺序是&…...

项目管理从专家到小白
敏捷开发 Scrum 符合敏捷开发原则的一种典型且在全球使用最为广泛的框架。 三个角色 产品负责人Product Ower:专注于了解业务、客户和市场要求,然后相应地确定工程团队需要完成的工作的优先顺序。 敏捷教练Scrum Master:确保 Scrum 流程顺…...