POSE识别 神经网络
Pose 识别模型介绍
Pose 识别是计算机视觉领域的一个重要研究方向,其目标是从图像或视频中检测出人体的关键点位置,从而估计出人体的姿态。这项技术在许多领域都有广泛的应用,如动作捕捉、人机交互、体育分析、安防监控等。
Pose 识别模型的发展历程
Pose 识别技术的发展经历了多个阶段,从早期的基于手工特征的方法,到后来的基于深度学习的方法,性能不断提升。以下是一些具有代表性的 Pose 识别模型:

-
OpenPose:由 CMU 团队开发,是第一个实现多人实时姿态估计的系统。它采用了自下而上的方法,先检测图像中的所有关键点,再通过 Part Affinity Fields (PAFs) 将关键点关联到不同的人身上。
-
AlphaPose:在 OpenPose 的基础上进行了改进,提出了参数化姿态非极大值抑制 (Parametric Pose NMS) 方法,提高了姿态估计的精度。
-
HRNet:通过高分辨率表征网络,能够在整个网络处理过程中保持高分辨率表征,从而获得更精确的关键点定位。
-
SimpleBaseline:证明了简单的卷积神经网络架构在姿态估计任务上也能取得很好的效果,强调了数据增强和模型集成的重要性。
-
DETR:将 Transformer 引入姿态估计任务,提出了 End-to-End 的姿态估计方法,避免了传统方法中的后处理步骤。
Pose 识别模型的原理
Pose 识别模型的原理可以分为两种主要方法:自下而上 (bottom-up) 和自上而下 (top-down)。
自下而上方法
自下而上方法先检测图像中的所有关键点,然后将这些关键点分组到不同的人身上。这种方法的优点是处理速度快,适合处理多人场景;缺点是关键点分组的准确性可能较低。
以 OpenPose 为例,其核心原理如下:
-
特征提取:使用卷积神经网络提取图像的特征。
-
关键点检测:网络输出两个分支,一个分支用于检测关键点的置信度图 (confidence maps),另一个分支用于检测 Part Affinity Fields (PAFs)。
-
关键点关联:通过 PAFs 将检测到的关键点关联到不同的人身上。PAFs 是一种二维向量场,表示两个关键点之间的关联程度和方向。
自上而下方法
自上而下方法先检测图像中的人,然后对每个人分别进行姿态估计。这种方法的优点是精度高,缺点是处理速度较慢,特别是在处理多人场景时。
以 SimpleBaseline 为例,其核心原理如下:
-
人体检测:使用目标检测算法检测图像中的人。
-
区域裁剪:根据检测到的人体边界框,裁剪出人体区域。
-
关键点估计:将裁剪出的人体区域输入到关键点估计网络中,输出人体关键点的位置。
Pose 识别模型的应用场景
Pose 识别技术在许多领域都有广泛的应用:
-
动作捕捉:在电影制作、游戏开发和虚拟现实中,用于捕捉演员或用户的动作。
-
人机交互:通过识别人体姿态,实现无需控制器的人机交互,如手势控制、姿态识别等。
-
体育分析:分析运动员的动作姿态,帮助教练和运动员改进技术,预防受伤。
-
健康监测:监测老年人或病人的姿态和动作,及时发现跌倒等异常情况。
-
安防监控:通过分析人员的姿态和行为,检测异常行为,如入侵、斗殴等。
Pose 识别模型的代码实现
下面我们将使用 Python 和 PyTorch 实现一个基于 HRNet 的 Pose 识别模型。HRNet 是一个高性能的姿态估计模型,能够保持高分辨率的特征表示,从而获得更精确的关键点定位。
首先,我们需要安装必要的库:
pip install torch torchvision torchaudio
pip install opencv-python numpy matplotlib
pip install pycocotools
接下来,我们实现 HRNet 模型的代码:
import torch
import torch.nn as nn
import torch.nn.functional as F
import numpy as np
import cv2
import matplotlib.pyplot as plt
from torchvision import transforms
from pycocotools.coco import COCO
import os# 定义HRNet的基本模块
class BasicBlock(nn.Module):expansion = 1def __init__(self, inplanes, planes, stride=1, downsample=None):super(BasicBlock, self).__init__()self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=3, stride=stride,padding=1, bias=False)self.bn1 = nn.BatchNorm2d(planes)self.relu = nn.ReLU(inplace=True)self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=1,padding=1, bias=False)self.bn2 = nn.BatchNorm2d(planes)self.downsample = downsampleself.stride = stridedef forward(self, x):residual = xout = self.conv1(x)out = self.bn1(out)out = self.relu(out)out = self.conv2(out)out = self.bn2(out)if self.downsample is not None:residual = self.downsample(x)out += residualout = self.relu(out)return outclass Bottleneck(nn.Module):expansion = 4def __init__(self, inplanes, planes, stride=1, downsample=None):super(Bottleneck, self).__init__()self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=1, bias=False)self.bn1 = nn.BatchNorm2d(planes)self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=stride,padding=1, bias=False)self.bn2 = nn.BatchNorm2d(planes)self.conv3 = nn.Conv2d(planes, planes * self.expansion, kernel_size=1, bias=False)self.bn3 = nn.BatchNorm2d(planes * self.expansion)self.relu = nn.ReLU(inplace=True)self.downsample = downsampleself.stride = stridedef forward(self, x):residual = xout = self.conv1(x)out = self.bn1(out)out = self.relu(out)out = self.conv2(out)out = self.bn2(out)out = self.relu(out)out = self.conv3(out)out = self.bn3(out)if self.downsample is not None:residual = self.downsample(x)out += residualout = self.relu(out)return out# 定义HRNet的多分辨率模块
class HighResolutionModule(nn.Module):def __init__(self, num_branches, blocks, num_blocks, num_inchannels,num_channels, multi_scale_output=True):super(HighResolutionModule, self).__init__()self._check_branches(num_branches, blocks, num_blocks, num_inchannels, num_channels)self.num_inchannels = num_inchannelsself.num_branches = num_branchesself.multi_scale_output = multi_scale_outputself.branches = self._make_branches(num_branches, blocks, num_blocks, num_channels)self.fuse_layers = self._make_fuse_layers()self.relu = nn.ReLU(True)def _check_branches(self, num_branches, blocks, num_blocks,num_inchannels, num_channels):if num_branches != len(num_blocks):error_msg = 'NUM_BRANCHES({}) <> NUM_BLOCKS({})'.format(num_branches, len(num_blocks))raise ValueError(error_msg)if num_branches != len(num_channels):error_msg = 'NUM_BRANCHES({}) <> NUM_CHANNELS({})'.format(num_branches, len(num_channels))raise ValueError(error_msg)if num_branches != len(num_inchannels):error_msg = 'NUM_BRANCHES({}) <> NUM_INCHANNELS({})'.format(num_branches, len(num_inchannels))raise ValueError(error_msg)def _make_one_branch(self, branch_index, block, num_blocks, num_channels,stride=1):downsample = Noneif stride != 1 or \self.num_inchannels[branch_index] != num_channels[branch_index] * block.expansion:downsample = nn.Sequential(nn.Conv2d(self.num_inchannels[branch_index],num_channels[branch_index] * block.expansion,kernel_size=1, stride=stride, bias=False),nn.BatchNorm2d(num_channels[branch_index] * block.expansion),)layers = []layers.append(block(self.num_inchannels[branch_index],num_channels[branch_index], stride, downsample))self.num_inchannels[branch_index] = \num_channels[branch_index] * block.expansionfor i in range(1, num_blocks[branch_index]):layers.append(block(self.num_inchannels[branch_index],num_channels[branch_index]))return nn.Sequential(*layers)def _make_branches(self, num_branches, block, num_blocks, num_channels):branches = []for i in range(num_branches):branches.append(self._make_one_branch(i, block, num_blocks, num_channels))return nn.ModuleList(branches)def _make_fuse_layers(self):if self.num_branches == 1:return Nonenum_branches = self.num_branchesnum_inchannels = self.num_inchannelsfuse_layers = []for i in range(num_branches if self.multi_scale_output else 1):fuse_layer = []for j in range(num_branches):if j > i:fuse_layer.append(nn.Sequential(nn.Conv2d(num_inchannels[j],num_inchannels[i],1,1,0,bias=False),nn.BatchNorm2d(num_inchannels[i]),nn.Upsample(scale_factor=2**(j-i), mode='nearest')))elif j == i:fuse_layer.append(None)else:conv3x3s = []for k in range(i-j):if k == i-j-1:num_outchannels_conv3x3 = num_inchannels[i]conv3x3s.append(nn.Sequential(nn.Conv2d(num_inchannels[j],num_outchannels_conv3x3,3, 2, 1, bias=False),nn.BatchNorm2d(num_outchannels_conv3x3)))else:num_outchannels_conv3x3 = num_inchannels[j]conv3x3s.append(nn.Sequential(nn.Conv2d(num_inchannels[j],num_outchannels_conv3x3,3, 2, 1, bias=False),nn.BatchNorm2d(num_outchannels_conv3x3),nn.ReLU(True)))fuse_layer.append(nn.Sequential(*conv3x3s))fuse_layers.append(nn.ModuleList(fuse_layer))return nn.ModuleList(fuse_layers)def get_num_inchannels(self):return self.num_inchannelsdef forward(self, x):if self.num_branches == 1:return [self.branches[0](x[0])]for i in range(self.num_branches):x[i] = self.branches[i](x[i])x_fuse = []for i in range(len(self.fuse_layers)):y = x[0] if i == 0 else self.fuse_layers[i][0](x[0])for j in range(1, self.num_branches):if i == j:y = y + x[j]else:y = y + self.fuse_layers[i][j](x[j])x_fuse.append(self.relu(y))return x_fuse# 定义HRNet模型
class PoseHighResolutionNet(nn.Module):def __init__(self, cfg, **kwargs):self.inplanes = 64super(PoseHighResolutionNet, self).__init__()# stem netself.conv1 = nn.Conv2d(3, 64, kernel_size=3, stride=2, padding=1,bias=False)self.bn1 = nn.BatchNorm2d(64)self.conv2 = nn.Conv2d(64, 64, kernel_size=3, stride=2, padding=1,bias=False)self.bn2 = nn.BatchNorm2d(64)self.relu = nn.ReLU(inplace=True)self.layer1 = self._make_layer(Bottleneck, 64, 4)# build stage 2self.stage2_cfg = cfg['MODEL']['EXTRA']['STAGE2']num_channels = self.stage2_cfg['NUM_CHANNELS']block = self._get_block(self.stage2_cfg['BLOCK'])num_channels = [num_channels[i] * block.expansion for i in range(len(num_channels))]self.transition1 = self._make_transition_layer([256], num_channels)self.stage2, pre_stage_channels = self._make_stage(self.stage2_cfg, num_channels)# build stage 3self.stage3_cfg = cfg['MODEL']['EXTRA']['STAGE3']num_channels = self.stage3_cfg['NUM_CHANNELS']block = self._get_block(self.stage3_cfg['BLOCK'])num_channels = [num_channels[i] * block.expansion for i in range(len(num_channels))]self.transition2 = self._make_transition_layer(pre_stage_channels, num_channels)self.stage3, pre_stage_channels = self._make_stage(self.stage3_cfg, num_channels)# build stage 4self.stage4_cfg = cfg['MODEL']['EXTRA']['STAGE4']num_channels = self.stage4_cfg['NUM_CHANNELS']block = self._get_block(self.stage4_cfg['BLOCK'])num_channels = [num_channels[i] * block.expansion for i in range(len(num_channels))]self.transition3 = self._make_transition_layer(pre_stage_channels, num_channels)self.stage4, pre_stage_channels = self._make_stage(self.stage4_cfg, num_channels, multi_scale_output=False)# final layerself.final_layer = nn.Conv2d(in_channels=pre_stage_channels[0],out_channels=cfg['MODEL']['NUM_JOINTS'],kernel_size=cfg['MODEL']['EXTRA']['FINAL_CONV_KERNEL'],stride=1,padding=1 if cfg['MODEL']['EXTRA']['FINAL_CONV_KERNEL'] == 3 else 0)self.pretrained_layers = cfg['MODEL']['EXTRA']['PRETRAINED_LAYERS']def _get_block(self, name):if name == 'BASIC':return BasicBlockelif name == 'BOTTLENECK':return Bottleneckelse:raise ValueError('Block name {} not supported'.format(name))def _make_transition_layer(self, num_channels_pre_layer, num_channels_cur_layer):num_branches_cur = len(num_channels_cur_layer)num_branches_pre = len(num_channels_pre_layer)transition_layers = []for i in range(num_branches_cur):if i < num_branches_pre:if num_channels_cur_layer[i] != num_channels_pre_layer[i]:transition_layers.append(nn.Sequential(nn.Conv2d(num_channels_pre_layer[i],num_channels_cur_layer[i],3,1,1,bias=False),nn.BatchNorm2d(num_channels_cur_layer[i]),nn.ReLU(inplace=True)))else:transition_layers.append(None)else:conv3x3s = []for j in range(i+1-num_branches_pre):inchannels = num_channels_pre_layer[-1]outchannels = num_channels_cur_layer[i] \if j == i-num_branches_pre else inchannelsconv3x3s.append(nn.Sequential(nn.Conv2d(inchannels, outchannels, 3, 2, 1, bias=False),nn.BatchNorm2d(outchannels),nn.ReLU(inplace=True)))transition_layers.append(nn.Sequential(*conv3x3s))return nn.ModuleList(transition_layers)def _make_layer(self, block, planes, blocks, stride=1):downsample = Noneif stride != 1 or self.inplanes != planes * block.expansion:downsample = nn.Sequential(nn.Conv2d(self.inplanes, planes * block.expansion,kernel_size=1, stride=stride, bias=False),nn.BatchNorm2d(planes * block.expansion),)layers = []layers.append(block(self.inplanes, planes, stride, downsample))self.inplanes = planes * block.expansionfor i in range(1, blocks):layers.append(block(self.inplanes, planes))return nn.Sequential(*layers)def _make_stage(self, layer_config, num_inchannels,multi_scale_output=True):num_modules = layer_config['NUM_MODULES']num_branches = layer_config['NUM_BRANCHES']num_blocks = layer_config['NUM_BLOCKS']num_channels = layer_config['NUM_CHANNELS']block = self._get_block(layer_config['BLOCK'])fuse_method = layer_config['FUSE_METHOD']modules = []for i in range(num_modules):# multi_scale_output is only used last moduleif not multi_scale_output and i == num_modules - 1:reset_multi_scale_output = Falseelse:reset_multi_scale_output = Truemodules.append(HighResolutionModule(num_branches,block,num_blocks,num_inchannels,num_channels,reset_multi_scale_output))num_inchannels = modules[-1].get_num_inchannels()return nn.Sequential(*modules), num_inchannelsdef forward(self, x):x = self.conv1(x)x = self.bn1(x)x = self.relu(x)x = self.conv2(x)x = self.bn2(x)x = self.relu(x)x = self.layer1(x)x_list = []for i in range(self.stage2_cfg['NUM_BRANCHES']):if self.transition1[i] is not None:x_list.append(self.transition1[i](x))else:x_list.append(x)y_list = self.stage2(x_list)x_list = []for i in range(self.stage3_cfg['NUM_BRANCHES']):if self.transition2[i] is not None:if i < self.stage2_cfg['NUM_BRANCHES']:x_list.append(self.transition2[i](y_list[i]))else:x_list.append(self.transition2[i](y_list[-1]))else:x_list.append(y_list[i])y_list = self.stage3(x_list)x_list = []for i in range(self.stage4_cfg['NUM_BRANCHES']):if self.transition3[i] is not None:if i < self.stage3_cfg['NUM_BRANCHES']:x_list.append(self.transition3[i](y_list[i]))else:x_list.append(self.transition3[i](y_list[-1]))else:x_list.append(y_list[i])y_list = self.stage4(x_list)x = self.final_layer(y_list[0])return xdef init_weights(self, pretrained=''):print('=> init weights from normal distribution')for m in self.modules():if isinstance(m, nn.Conv2d):# nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')nn.init.normal_(m.weight, std=0.001)for name, _ in m.named_parameters():if name in ['bias']:nn.init.constant_(m.bias, 0)elif isinstance(m, nn.BatchNorm2d):nn.init.constant_(m.weight, 1)nn.init.constant_(m.bias, 0)elif isinstance(m, nn.ConvTranspose2d):nn.init.normal_(m.weight, std=0.001)for name, _ in m.named_parameters():if name in ['bias']:nn.init.constant_(m.bias, 0)if os.path.isfile(pretrained):pretrained_state_dict = torch.load(pretrained)print('=> loading pretrained model {}'.format(pretrained))need_init_state_dict = {}for name, m in pretrained_state_dict.items():if name.split('.')[0] in self.pretrained_layers \or self.pretrained_layers[0] is '*':need_init_state_dict[name] = mself.load_state_dict(need_init_state_dict, strict=False)elif pretrained:print('=> unable to load pretrained model {}'.format(pretrained))# 配置文件
def get_cfg():cfg = {'MODEL': {'NAME': 'pose_hrnet','NUM_JOINTS': 17,'EXTRA': {'PRETRAINED_LAYERS': ['*'],'STEM_INPLANES': 64,'FINAL_CONV_KERNEL': 1,'STAGE2': {'NUM_MODULES': 1,'NUM_BRANCHES': 2,'BLOCK': 'BASIC','NUM_BLOCKS': [4, 4],'NUM_CHANNELS': [32, 64],'FUSE_METHOD': 'SUM',},'STAGE3': {'NUM_MODULES': 4,'NUM_BRANCHES': 3,'BLOCK': 'BASIC','NUM_BLOCKS': [4, 4, 4],'NUM_CHANNELS': [32, 64, 128],'FUSE_METHOD': 'SUM',},'STAGE4': {'NUM_MODULES': 3,'NUM_BRANCHES': 4,'BLOCK': 'BASIC','NUM_BLOCKS': [4, 4, 4, 4],'NUM_CHANNELS': [32, 64, 128, 256],'FUSE_METHOD': 'SUM',},}}}return cfg# 创建HRNet模型
def get_pose_net(cfg, is_train=True):model = PoseHighResolutionNet(cfg)if is_train and cfg['MODEL']['INIT_WEIGHTS']:model.init_weights(cfg['MODEL']['PRETRAINED'])return model# 加载COCO数据集
class COCODataset(torch.utils.data.Dataset):def __init__(self, root_dir, json_file, transform=None):self.root_dir = root_dirself.coco = COCO(json_file)self.img_ids = list(self.coco.imgs.keys())self.transform = transformself.joints_name = ['nose', 'left_eye', 'right_eye', 'left_ear', 'right_ear','left_shoulder', 'right_shoulder', 'left_elbow', 'right_elbow','left_wrist', 'right_wrist', 'left_hip', 'right_hip','left_knee', 'right_knee', 'left_ankle', 'right_ankle']def __len__(self):return len(self.img_ids)def __getitem__(self, idx):img_id = self.img_ids[idx]img_info = self.coco.loadImgs(img_id)[0]img_path = os.path.join(self.root_dir, img_info['file_name'])img = cv2.imread(img_path)img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)# 获取人体标注ann_ids = self.coco.getAnnIds(imgIds=img_id)anns = self.coco.loadAnns(ann_ids)# 只考虑第一个人if len(anns) > 0:ann = anns[0]bbox = ann['bbox']joints = ann['keypoints']# 裁剪人体区域x, y, w, h = bboximg_crop = img[int(y):int(y+h), int(x):int(x+w)]# 调整关节点坐标joints = np.array(joints).reshape(-1, 3)joints[:, 0] -= xjoints[:, 1] -= y# 应用变换if self.transform:img_crop = self.transform(img_crop)# 生成热图heatmaps = self._generate_heatmaps(joints, img_crop.shape[1:])return img_crop, heatmaps# 如果没有检测到人体,返回全零热图if self.transform:img = self.transform(img)heatmaps = torch.zeros(17, img.shape[1], img.shape[2])return img, heatmapsdef _generate_heatmaps(self, joints, img_size, sigma=2):"""生成关键点的热图"""num_joints = joints.shape[0]heatmaps = np.zeros((num_joints, img_size[0], img_size[1]), dtype=np.float32)for joint_id in range(num_joints):# 如果关键点不可见,跳过if joints[joint_id, 2] == 0:continue# 计算高斯核x, y = int(joints[joint_id, 0]), int(joints[joint_id, 1])if x < 0 or y < 0 or x >= img_size[1] or y >= img_size[0]:continue# 生成高斯热图xx, yy = np.meshgrid(np.arange(img_size[1]), np.arange(img_size[0]))heatmap = np.exp(-((xx - x) ** 2 + (yy - y) ** 2) / (2 * sigma ** 2))heatmap[heatmap > np.finfo(heatmap.dtype).eps] = 1# 将热图添加到结果中heatmaps[joint_id] = heatmapreturn torch.from_numpy(heatmaps)# 训练函数
def train_model(model, train_loader, criterion, optimizer, device, epochs):model.train()for epoch in range(epochs):running_loss = 0.0for i, (images, heatmaps) in enumerate(train_loader):images = images.to(device)heatmaps = heatmaps.to(device)# 前向传播outputs = model(images)loss = criterion(outputs, heatmaps)# 反向传播和优化optimizer.zero_grad()loss.backward()optimizer.step()running_loss += loss.item()# 打印训练信息print(f'Epoch {epoch+1}/{epochs}, Loss: {running_loss/len(train_loader):.4f}')print('Training finished.')# 测试函数
def test_model(model, test_loader, device):model.eval()with torch.no_grad():for images, heatmaps in test_loader:images = images.to(device)outputs = model(images)# 可视化结果for i in range(images.size(0)):img = images[i].cpu().permute(1, 2, 0).numpy()pred_heatmaps = outputs[i].cpu().numpy()# 显示原图plt.figure(figsize=(10, 5))plt.subplot(121)plt.imshow(img)plt.title('Input Image')# 显示预测的关键点plt.subplot(122)plt.imshow(img)for j in range(pred_heatmaps.shape[0]):# 找到热图中的最大值位置max_idx = np.unravel_index(np.argmax(pred_heatmaps[j]), pred_heatmaps[j].shape)plt.plot(max_idx[1], max_idx[0], 'ro', markersize=5)plt.title('Predicted Keypoints')plt.show()# 主函数
def main():# 设置设备device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')# 获取配置cfg = get_cfg()# 创建模型model = get_pose_net(cfg, is_train=True)model = model.to(device)# 定义数据变换transform = transforms.Compose([transforms.ToTensor(),transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]),])# 加载数据集# 注意:这里需要替换为实际的COCO数据集路径train_dataset = COCODataset(root_dir='path/to/coco/train2017',json_file='path/to/coco/annotations/person_keypoints_train2017.json',transform=transform)test_dataset = COCODataset(root_dir='path/to/coco/val2017',json_file='path/to/coco/annotations/person_keypoints_val2017.json',transform=transform)# 创建数据加载器train_loader = torch.utils.data.DataLoader(train_dataset, batch_size=16, shuffle=True, num_workers=4)test_loader = torch.utils.data.DataLoader(test_dataset, batch_size=4, shuffle=False, num_workers=4)# 定义损失函数和优化器criterion = nn.MSELoss()optimizer = torch.optim.Adam(model.parameters(), lr=0.001)# 训练模型train_model(model, train_loader, criterion, optimizer, device, epochs=10)# 测试模型test_model(model, test_loader, device)# 保存模型torch.save(model.state_dict(), 'hrnet_pose_estimation.pth')if __name__ == '__main__':main()
以上代码实现了一个基于 HRNet 的姿态估计模型,包括模型定义、数据加载、训练和测试等功能。这个模型可以从图像中检测出人体的 17 个关键点,包括鼻子、眼睛、耳朵、肩膀、肘部、手腕、臀部、膝盖和脚踝。
模型训练和评估
要训练这个模型,你需要准备 COCO 数据集,这是一个广泛用于姿态估计的数据集,包含约 20 万张图像和 80 个类别。你可以从 COCO 官方网站下载数据集,并按照上面代码中的路径设置进行配置。
训练过程中,模型会学习预测每个关键点的热图 (heatmap),热图中的峰值表示关键点的位置。训练完成后,你可以使用测试函数来评估模型的性能,并可视化预测结果。
模型应用
训练好的姿态估计模型可以应用于各种场景,如动作分析、体育训练、人机交互等。你可以根据自己的需求,将这个模型集成到更大的系统中,实现更复杂的功能。
相关文章:
POSE识别 神经网络
Pose 识别模型介绍 Pose 识别是计算机视觉领域的一个重要研究方向,其目标是从图像或视频中检测出人体的关键点位置,从而估计出人体的姿态。这项技术在许多领域都有广泛的应用,如动作捕捉、人机交互、体育分析、安防监控等。 Pose 识别模型的…...

CSS3 基础知识、原理及与CSS的区别
CSS3 基础知识、原理及与CSS的区别 CSS3 基础知识 CSS3 是 Cascading Style Sheets 的第3个版本,是CSS技术的升级版本,于1999年开始制订,2001年5月23日W3C完成了CSS3的工作草案。 CSS3 主要模块 选择器:更强大的元素选择方式盒…...

电能质量扰动信号信号通过hilbert变换得到瞬时频率
利用Hilbert变换从电能质量扰动信号中提取瞬时频率、瞬时幅值、Hilbert谱和边际谱的详细步骤及MATLAB代码实现。该流程适用于电压暂降、暂升、谐波、闪变等扰动分析。 1. Hilbert变换与特征提取流程 1.1 基本步骤 信号预处理:滤波去噪(如小波去噪&…...
)
Linux工作台文件操作命令全流程解析(高级篇之awk精讲)
全文目录 1 工具介绍2 核心优势3 命令格式3.1 命令格式说明3.2 组成部分详解3.2.1 选项3.2.2 模式3.2.3 动作3.2.4 输入文件 4 使用说明4.1 常用示例4.2 awk 编程解析4.2.1 基础说明4.2.2 编程进阶 4.3 温馨提示 5 内置变量6 参考文献 写在前面 前面一篇《Linux工作台文件操作命…...

力扣119题:杨辉三角II(滚动数组)
小学生一枚,自学信奥中,没参加培训机构,所以命名不规范、代码不优美是在所难免的,欢迎指正。 标签: 杨辉三角、滚动数组 语言: C 题目: 给定一个非负索引 rowIndex,返回「杨辉三角…...
)
c++:算法(Algorithms)
目录 常用 STL 算法 1️⃣ std::sort(排序) 2️⃣ std::find(查找等于某值的元素) 3️⃣ std::count(统计出现次数) 4️⃣ std::next(获取迭代器的下一个位置) 5️⃣ .erase(…...

大疆无人机(全系列,包括mini)拉流至电脑,实现直播
参考视频 【保姆级教程】大疆无人机rtmp推流直播教程_哔哩哔哩_bilibili VLC使用教程: VLC工具使用指南-CSDN博客 目录 实现效果: 电脑端 编辑 编辑 无人机端 VLC拉流 分析 实现效果: (实验机型:大疆mini4kRC-N2遥控器、大…...
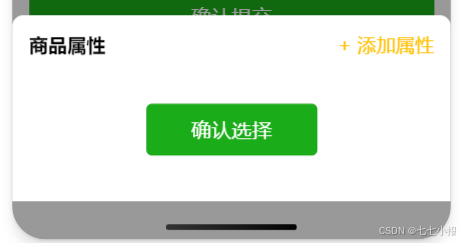
uniapp-商城-54-后台 新增商品(页面布局)
后台页面中还存在商品信息的添加和修改等。接下来我们逐步进行分析和展开。包含页面布局和数据库逻辑等等。 1、整体效果 样式效果如下,依然采用了表单形式来完成和商家信息差不多,但在商品属性上多做了一些弹窗等界面,样式和功能点表多。 …...

深入浅出MySQL 8.0:新特性与最佳实践
MySQL作为开源关系型数据库的佼佼者,近年来持续更新迭代,尤其是在8.0版本中引入了一系列令人兴奋的新特性。本文将介绍一些MySQL 8.0的关键新功能,并提供最佳实践,旨在帮助开发人员和DBA更好地利用这一强大的数据库管理系统。 一…...

JIT+Opcache如何配置才能达到性能最优
首先打开php.ini文件,进行配置 1、OPcache配置 ; 启用OPcache opcache.enable1; CLI环境下启用OPcache(按需配置) opcache.enable_cli0; 预加载脚本(PHP 7.4,加速常用类) ; opcache.preload/path/to/prel…...
python开发经验)
(2)python开发经验
文章目录 1 pyside6加载ui文件2 使用pyinstaller打包 更多精彩内容👉内容导航 👈👉Qt开发 👈👉python开发 👈 1 pyside6加载ui文件 方法1: 直接加载ui文件 from PySide6.QtWidgets import QAp…...

WebpackVite总结篇与进阶
模块化 Webpack Webpack 入口entry 分离app和第三方库入口 这是什么? 这是告诉 webpack 我们想要配置 2 个单独的入口点(例如上面的示例)。 为什么? 这样你就可以在 vendor.js 中存入未做修改的必要 library 或文件࿰…...

【python】基础知识点100问
以下是Python基础语法知识的30条要点整理,涵盖数据类型、函数、控制结构等核心内容,结合最新资料归纳总结: 基础30问 一、函数特性 函数多返回值 支持用逗号分隔返回多个值,自动打包为元组,接收时可解包到多个变量 def func(): return 1, "a" x, y = func()匿…...

uniapp 百家云直播插件打包失败
打包错误日志 Android自有证书 打包失败 错误日志: https://app.liuyingyong.cn/build/errorLog/cf41a610-effe-11ef-88db-05262d4c3e5d原因:需要导入插件依赖 依赖地址:https://ext.dcloud.net.cn/plugin?id16289 百家云直播插件地址 直播插…...
SpringBoot--springboot简述及快速入门
spring Boot是spring提供的一个子项目,用于快速构建spring应用程序 传统方式: 在众多子项目中,spring framework项目为核心子项目,提供了核心的功能,其他的子项目都需要依赖于spring framework,在我们实际…...
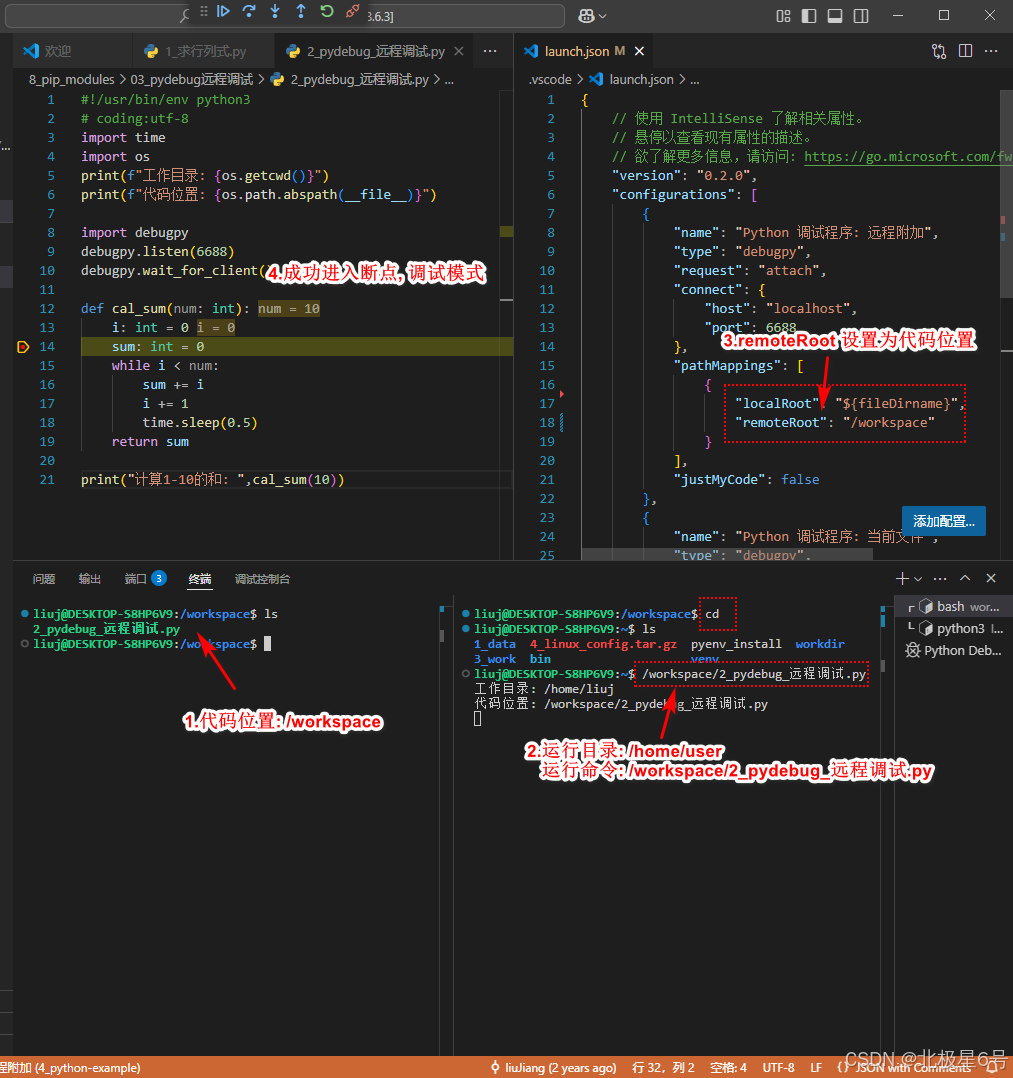
vscode_python远程调试_pathMappings配置说明
1.使用说明 vscode python 远程调试pathMappings 配置 launch.json "pathMappings": [{"localRoot": "本地代码目录","remoteRoot": "远程代码目录" # 注意不是运行目录, 是远程代码的目录}],2.测试验证 测试目的: 远程代…...

遨游5G-A防爆手机:赋能工业通信更快、更安全
在工业数字化转型与5G-A商用进程加速的双重驱动下,中国防爆手机市场正迎来历史性发展机遇。作为“危、急、特”场景通信解决方案服务商,遨游通讯深刻洞察到:当5G-A网络以超高速率、海量连接和毫秒级时延重塑行业生态时,防爆手机这…...
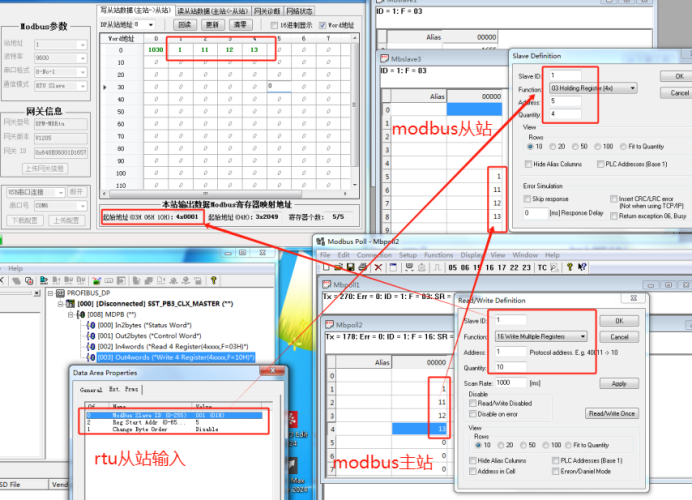
Profibus DP主站与Modbus RTU/TCP网关与海仕达变频器轻松实现数据交互
Profibus DP主站与Modbus RTU/TCP网关与海仕达变频器轻松实现数据交互 Profibus DP主站转Modbus RTU/TCP(XD-MDPBm20)网关在Profibus总线侧实现主站功能,在Modbus串口侧实现从站功能。可将ProfibusDP协议的设备(如:海…...

C++八股——智能指针
文章目录 1. 背景2. 原理与使用2.1 auto_ptr2.2 unique_ptr2.3 shared_ptr2.4 weak_ptr2.5 定制删除器 1. 背景 智能指针不是指针,是一个管理指针的类,用来存储指向动态分配对象的指针,负责自动释放动态分配的对象,防止堆内存泄漏…...
「华为」人形机器人赛道投资首秀!
温馨提示:运营团队2025年最新原创报告(共210页) —— 正文: 近日,【华为】完成具身智能赛道投资首秀,继续加码人形机器人赛道布局。 2025年3月31日,具身智能机器人头部创企【千寻智能&#x…...

格雷希尔G10和G15系列自动化快速密封连接器,适用于哪些管件的密封,以及它们相关的特性有哪些?
格雷希尔G10和G15系列快速密封连接器,用于自动化和半自动化过程中的外部或内部密封,通过使用气压驱动来挤压内部的密封圈,创造一个适用于各种管件的无泄漏密封连接,连接器内部的弹性密封圈可以提供其他产品不能提供的卓越密封性能…...

mac一键安装gpt-sovit教程中,homebrew卡住不动的问题
mac一键安装gpt-sovit教程 仅作为安装过程中解决homebrew卡住问题的记录 资源地址 https://www.yuque.com/baicaigongchang1145haoyuangong/ib3g1e/znoph9dtetg437xb#mlAoP 下载一键包 下载后并解压,找到install for mac.sh,终端执行bash空格拖拽in…...
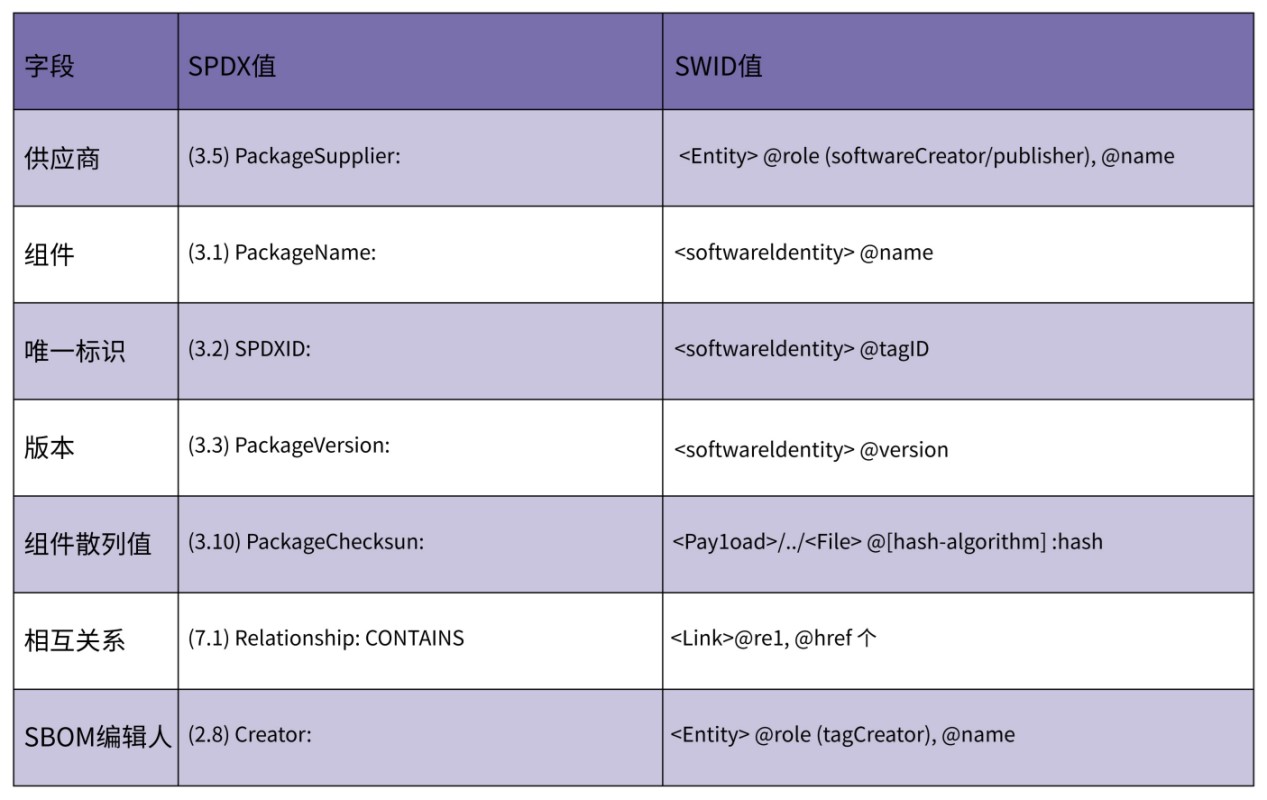
专栏特辑丨悬镜浅谈开源风险治理之SBOM与SCA
随着容器、微服务等新技术日新月异,开源软件成为业界主流形态,软件行业快速发展。但同时,软件供应链也越来越趋于复杂化和多样化,软件供应链安全风险不断加剧。 软件供应链安全主要包括软件开发生命周期和软件生存运营周期&#x…...
vue3项目创建-配置-elementPlus导入-路由自动导入
目录 方法一:create-vue 方法二 :Vite Vue Vite.config.ts配置 引入element-plus 安装 如何在项目中使用 Element Plus 完整引入 按需导入 vue3vite中自动配置路由的神器:vite-plugin-pages 1. 安装 2、修改vite.config.js中配置…...
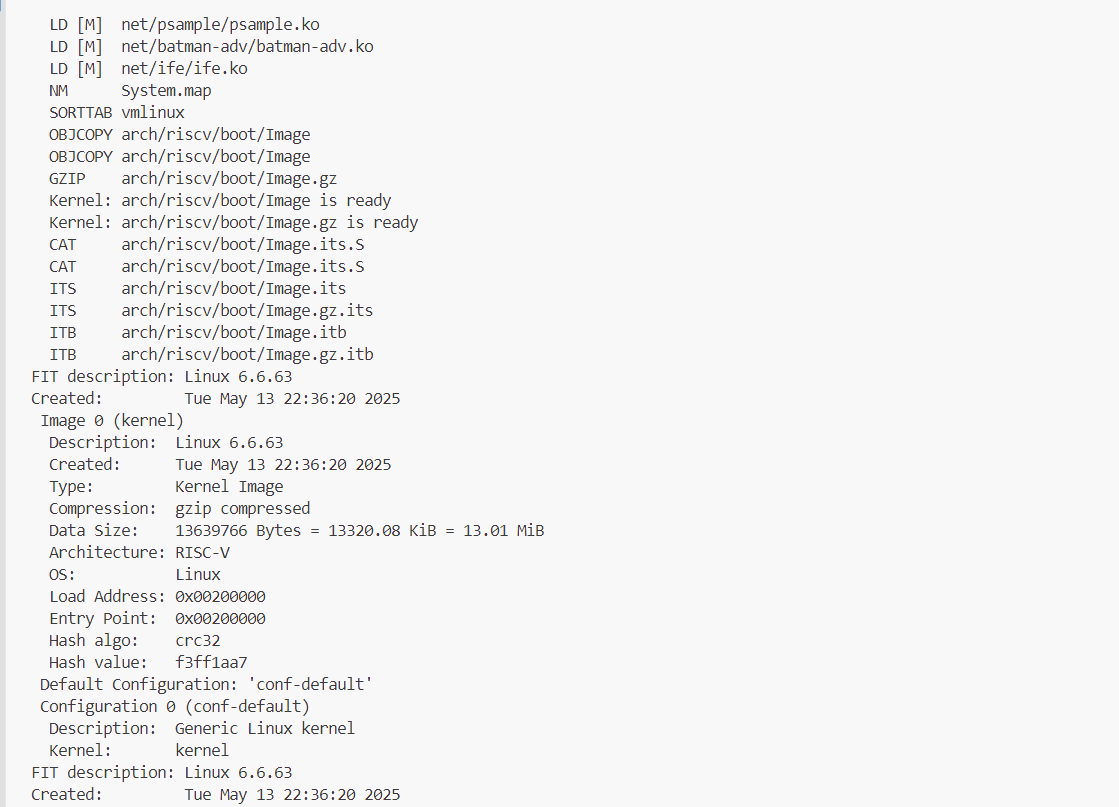
MUSE Pi Pro 编译kernel内核及创建自动化脚本进行环境配置
视频讲解: MUSE Pi Pro 编译kernel内核及创建自动化脚本进行环境配置 今天分享的主题为创建自动化脚本编译MUSE Pi Pro的kernel内核,脚本已经上传到中 GitHub - LitchiCheng/MUSE-Pi-Pro-Learning: MUSE-Pi-Pro-Learning ,有需要可以自行clon…...

Java大师成长计划之第20天:Spring Framework基础
📢 友情提示: 本文由银河易创AI(https://ai.eaigx.com)平台gpt-4o-mini模型辅助创作完成,旨在提供灵感参考与技术分享,文中关键数据、代码与结论建议通过官方渠道验证。 在Java开发领域,Spring …...
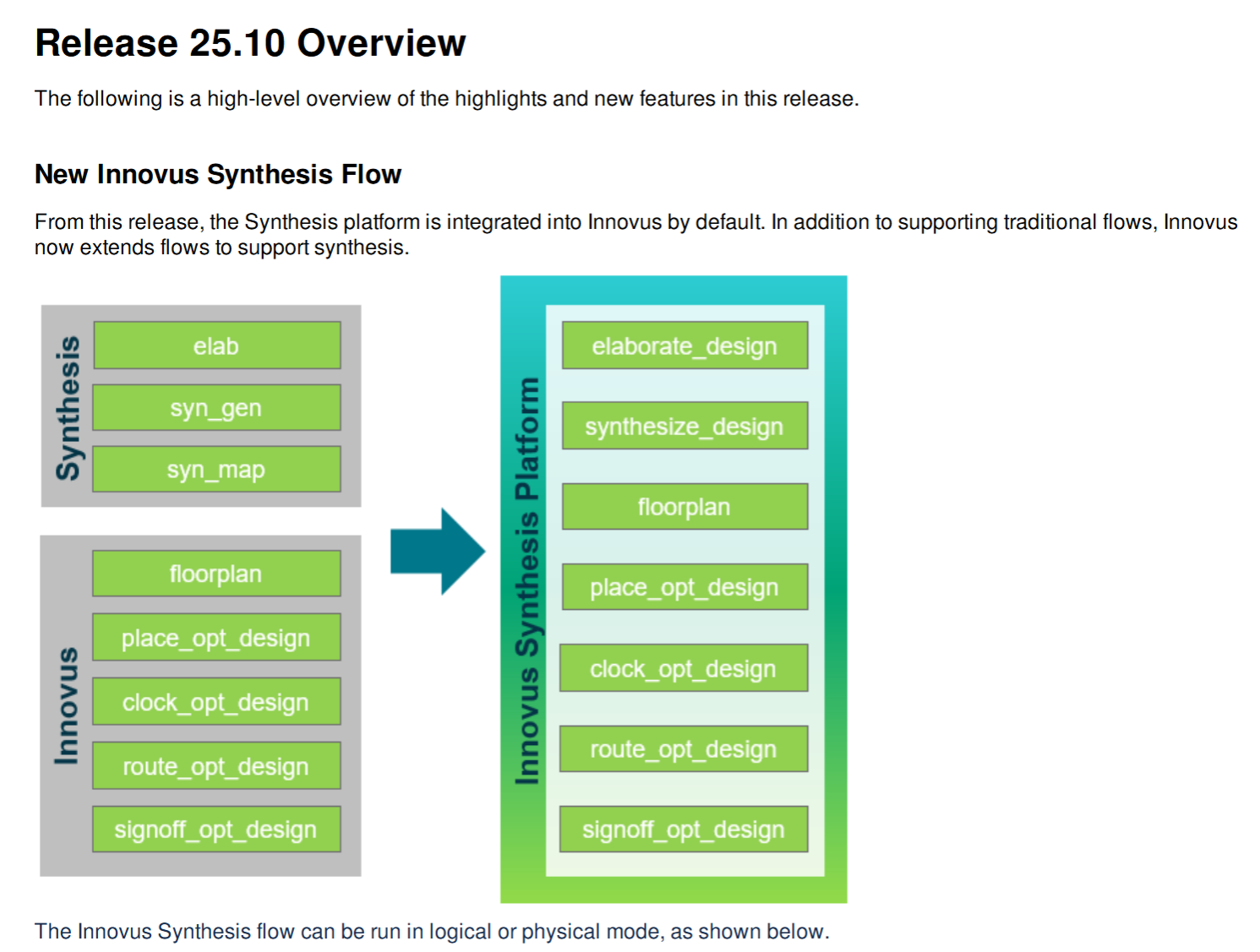
Innovus 25.1 版本更新:助力数字后端物理设计新飞跃
在数字后端物理设计领域,每一次工具的更新迭代都可能为项目带来巨大的效率提升与品质优化。今天,就让我们一同聚焦 Innovus 25.1 版本(即 25.10 版本)的更新要点,探寻其中蕴藏的创新能量。 一、核心功能的强势进 AI…...

FastAPI 和 MongoDB 实现请求头参数处理的示例,并在 React 中进行渲染
FastAPI 和 MongoDB 后端 安装必要的库 安装 FastAPI、Uvicorn、Motor(用于 MongoDB 的异步驱动)和 Pydantic(用于数据验证)。 pip install fastapi uvicorn motor pydantic创建 FastAPI 应用 创建一个文件 main.py,并…...
CodeBuddy 中国版 Cursor 实战:Redis+MySQL双引擎驱动〈王者荣耀〉战区排行榜
文章目录 一、引言二、系统架构设计2.1、整体架构概览2.2、数据库设计2.3、后端服务设计 三、实战:从零构建排行榜3.1、开发环境准备3.2、用户与战区 数据管理3.2.1、MySQL 数据库表创建3.2.2、实现用户和战区数据的 CURD 操作 3.3、实时分数更新3.4、排行榜查询3.5…...

码蹄集——分解、数组最大公约数、孪生质数、卡罗尔数、阶乘数
MT1158 分解 输入正整数N和M,判断N是否可以分解成M个不同的正整数的和,输出YES或者NO。 格式 输入格式:输入正整数N和M,空格分隔 输出格式:输出YES或者NO 样例 1 输入:5 2 输出:YES 思路…...