[学习]RTKLib详解:tle.c(系列终章)
本文是 RTKLlib详解 系列文章的一篇,目前该系列文章还在持续总结写作中,以发表的如下,有兴趣的可以翻阅。
[学习] RTKlib详解:功能、工具与源码结构解析
[学习]RTKLib详解:pntpos.c与postpos.c
[学习]RTKLib详解:rtkcmn.c与rtkpos.c
[学习]RTKLib详解:ppp.c与ppp_ar.c
[学习]RTKLib详解:ephemeris.c与rinex.c
[学习]RTKLib详解:sbas.c与rtcm.c
[学习]RTKLib详解:rtksvr.c与streamsvr.c
[学习]RTKLib详解:convkml.c、convrnx.c与geoid.c
[学习]RTKLib详解:datum.c、download.c与lambda.c
[学习]RTKLib详解:ionex.c、options.c与preceph.c
[学习] RTKLib详解:qzslex.c、rcvraw.c与solution.c
文章目录
- RTKLib详解:`tle.c`
- 一、文件整体说明
- 二、执行流程与函数调用关系
- 三、主要函数说明
- 3.1 `tle_init`
- 3.2 `tle_read_file`
- 3.3 `tle_propagate`
- 3.4 `tle_get_position`
- 四、关键算法数学原理与推导
- 1. 初始轨道参数转换
- 2. 开普勒方程求解
- 3. 真近点角计算
- 4. 位置与速度计算
- 5. 坐标系转换
- 五、终章
RTKLib详解:tle.c
一、文件整体说明
tle.c 是 RTKLIB 中用于处理 TLE(Two-Line Element)卫星轨道数据的核心模块。TLE 是描述卫星轨道状态的标准格式,广泛应用于近地轨道(LEO)和地球同步轨道(GEO)卫星的轨道预测。该文件实现了 TLE 数据的读取、解析、轨道传播及卫星位置计算功能。
主要功能:
- 解析 TLE 格式文件(两行轨道参数)。
- 支持 SGP4/SDP4 模型进行轨道传播。
- 计算任意时刻的卫星位置与速度(ECEF 坐标)。
主要特色:
- 兼容标准 TLE 格式(如 NORAD 提供的数据)。
- 支持多卫星批量处理。
- 高精度轨道预测(适用于 LEO/GEO 卫星)。
二、执行流程与函数调用关系
程序执行流程如下:
- 初始化 TLE 结构体。
- 读取并解析 TLE 文件内容。
- 设置目标时间并执行轨道传播。
- 输出卫星位置与速度。
函数调用关系如下:
三、主要函数说明
3.1 tle_init
int tle_init(tle_t *tle)
功能:
初始化 TLE 结构体,清空轨道参数与状态变量。
输入参数:
tle: TLE 数据结构体指针。
返回值:
- 成功返回 1,失败返回 0。
3.2 tle_read_file
int tle_read_file(FILE *fp, tle_t *tle)
功能:
从文件中读取 TLE 数据并解析为内部结构(支持多卫星 TLE 文件)。
输入参数:
fp: 文件指针。tle: 存储解析结果的结构体。
返回值:
- 成功返回 1,失败返回 0。
3.3 tle_propagate
int tle_propagate(tle_t *tle, double target_time)
功能:
基于 SGP4/SDP4 模型,将轨道参数传播到目标时间。
输入参数:
tle: TLE 数据结构体。target_time: 目标时间(相对于 TLE 历元的时间差,单位:分钟)。
返回值:
- 成功返回 1,失败返回 0。
3.4 tle_get_position
int tle_get_position(const tle_t *tle, double *pos, double *vel)
功能:
获取传播后卫星的位置与速度(ECEF 坐标系)。
输入参数:
tle: TLE 数据结构体。pos: 输出位置向量(3D,单位:km)。vel: 输出速度向量(3D,单位:km/min)。
返回值:
- 成功返回 1,失败返回 0。
四、关键算法数学原理与推导
SGP4 轨道传播模型
SGP4(Simplified General Perturbations Model 4)是 TLE 数据的标准轨道传播模型,适用于低轨道卫星(高度 < 5000 km)。其核心公式如下:
1. 初始轨道参数转换
从 TLE 中提取以下参数:
- 平均运动半长轴 a 0 a_0 a0(归一化单位)
- 偏心率 e 0 e_0 e0
- 平近点角 M 0 M_0 M0
- 轨道倾角 i 0 i_0 i0
- 升交点赤经 Ω 0 \Omega_0 Ω0
- 近地点幅角 ω 0 \omega_0 ω0
2. 开普勒方程求解
通过迭代法求解开普勒方程:
M = E − e sin E M = E - e \sin E M=E−esinE
其中 M M M 为平近点角, E E E 为偏近点角, e e e 为偏心率。
3. 真近点角计算
tan ( ν 2 ) = 1 + e 1 − e tan ( E 2 ) \tan\left(\frac{\nu}{2}\right) = \sqrt{\frac{1+e}{1-e}} \tan\left(\frac{E}{2}\right) tan(2ν)=1−e1+etan(2E)
4. 位置与速度计算
在轨道坐标系下:
r = a ( 1 − e 2 ) 1 + e cos ν r = \frac{a(1 - e^2)}{1 + e \cos \nu} r=1+ecosνa(1−e2)
v = μ ( 2 r − 1 a ) v = \sqrt{\mu \left( \frac{2}{r} - \frac{1}{a} \right)} v=μ(r2−a1)
其中 μ = 398600.4418 km 3 / s 2 \mu = 398600.4418 \, \text{km}^3/\text{s}^2 μ=398600.4418km3/s2 为地球引力常数。
5. 坐标系转换
通过欧拉角旋转将轨道坐标系转换为 ECEF 坐标系:
r E C E F = R 3 ( − Ω ) R 1 ( − i ) R 3 ( − ω ) ⋅ r o r b i t \mathbf{r}_{ECEF} = R_3(-\Omega) R_1(-i) R_3(-\omega) \cdot \mathbf{r}_{orbit} rECEF=R3(−Ω)R1(−i)R3(−ω)⋅rorbit
其中 R 1 R_1 R1、 R 3 R_3 R3 分别为绕第一轴与第三轴的旋转矩阵。
五、终章
到此为止,RTKLib/SRC目录下所有代码都已经解读介绍完整,这是RTKLib的技术核心,涵盖了GNSS卫星导航接收集方方面面的技术,包括信号处理、信息处理、定位解算、卡尔曼滤波、RTK高精度定位、区域增强定位、星基增强等等方方面面的知识,是学习和研究GNSS卫星导航技术的非常完美的一套开源代码。通过这些代码的研读,可以对整个卫星导航的了解十之八九,希望这系列文章,能够对大家研究RTKLib、研究GNSS卫星导航定位技术能够有所裨益,就不枉付出了。
剩下未详细介绍的代码主要是RTKLib/SRC/RCV目录下所有的代码为目前市面上各种GNSS接收机的控制管理以及数据解析文件,RTKLib/APP/目录下则为RTKLib提供的各种实用小工具,大部分工具都有可视化界面。这些工具为我们研究导航定位、进行数据分析提供了极大便利,但是因为已经不是导航定位的核心部分,就不再进行详细介绍了。
研究学习不易,点赞易。
工作生活不易,收藏易,点收藏不迷茫 :)
相关文章:
)
[学习]RTKLib详解:tle.c(系列终章)
本文是 RTKLlib详解 系列文章的一篇,目前该系列文章还在持续总结写作中,以发表的如下,有兴趣的可以翻阅。 [学习] RTKlib详解:功能、工具与源码结构解析 [学习]RTKLib详解:pntpos.c与postpos.c [学习]RTKLib详解&…...
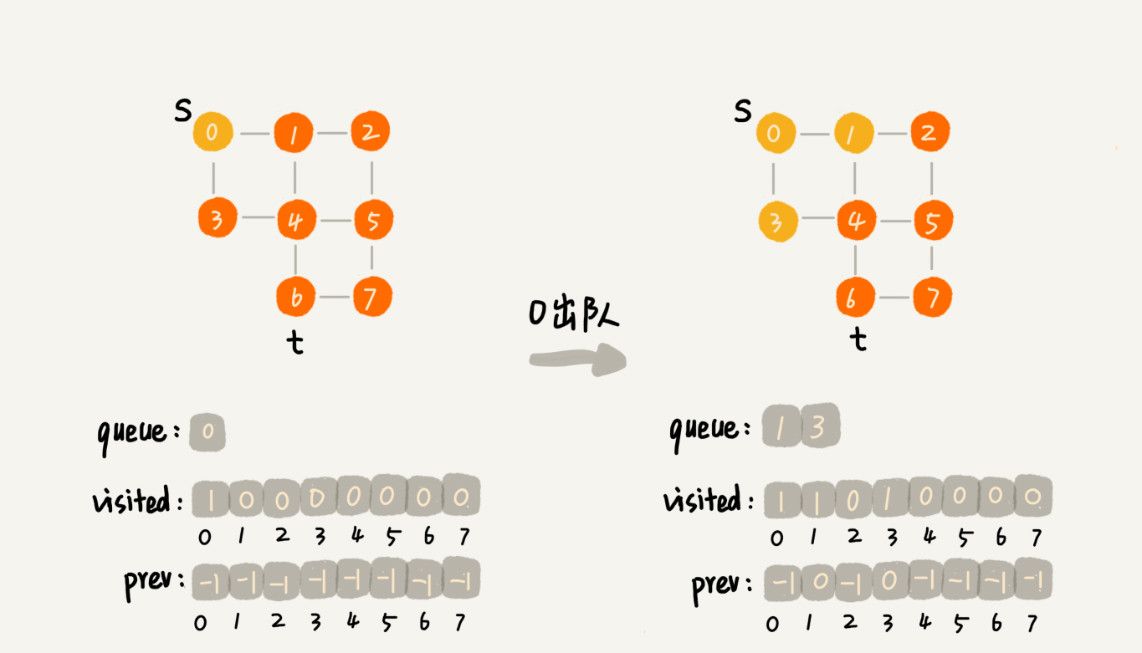
广度和深度优先搜索(BFS和DFS)
1. 广度和深度优先搜索(BFS和DFS) 1.1. Python实现BFS和DFS from collections import dequeclass Graph:"""无向图类,支持添加边,并实现了 BFS(广度优先搜索)和 DFS(深度优先搜…...
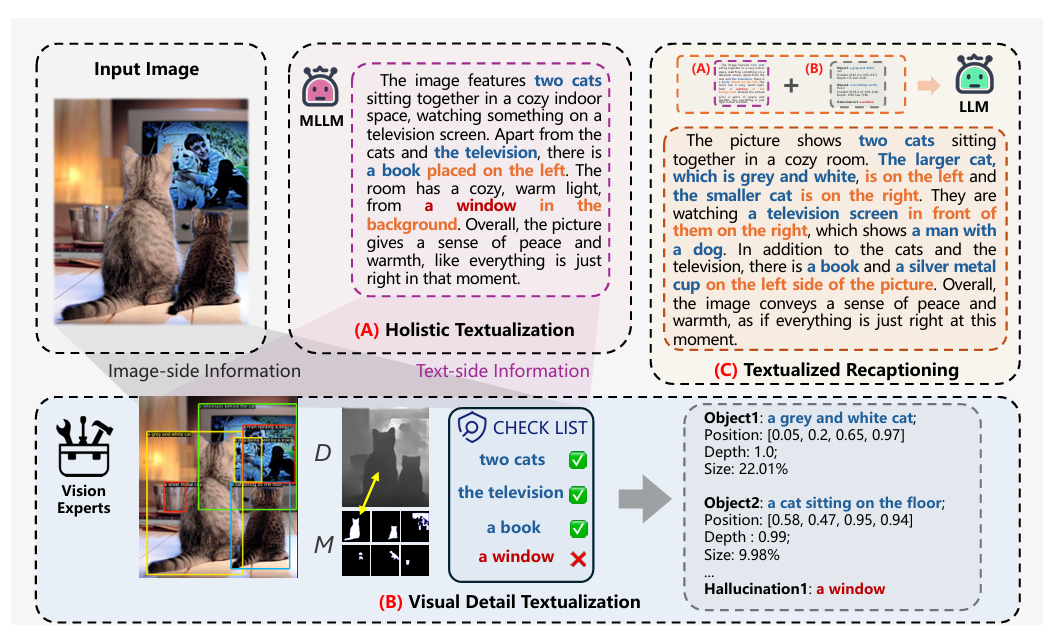
【计算机视觉】OpenCV实战项目:Text-Extraction-Table-Image:基于OpenCV与OCR的表格图像文本提取系统深度解析
Text-Extraction-Table-Image:基于OpenCV与OCR的表格图像文本提取系统深度解析 1. 项目概述2. 技术原理与算法设计2.1 图像预处理流水线2.2 表格结构检测算法2.3 OCR优化策略 3. 实战部署指南3.1 环境配置3.2 核心代码解析3.3 执行流程示例 4. 常见问题与解决方案4.…...
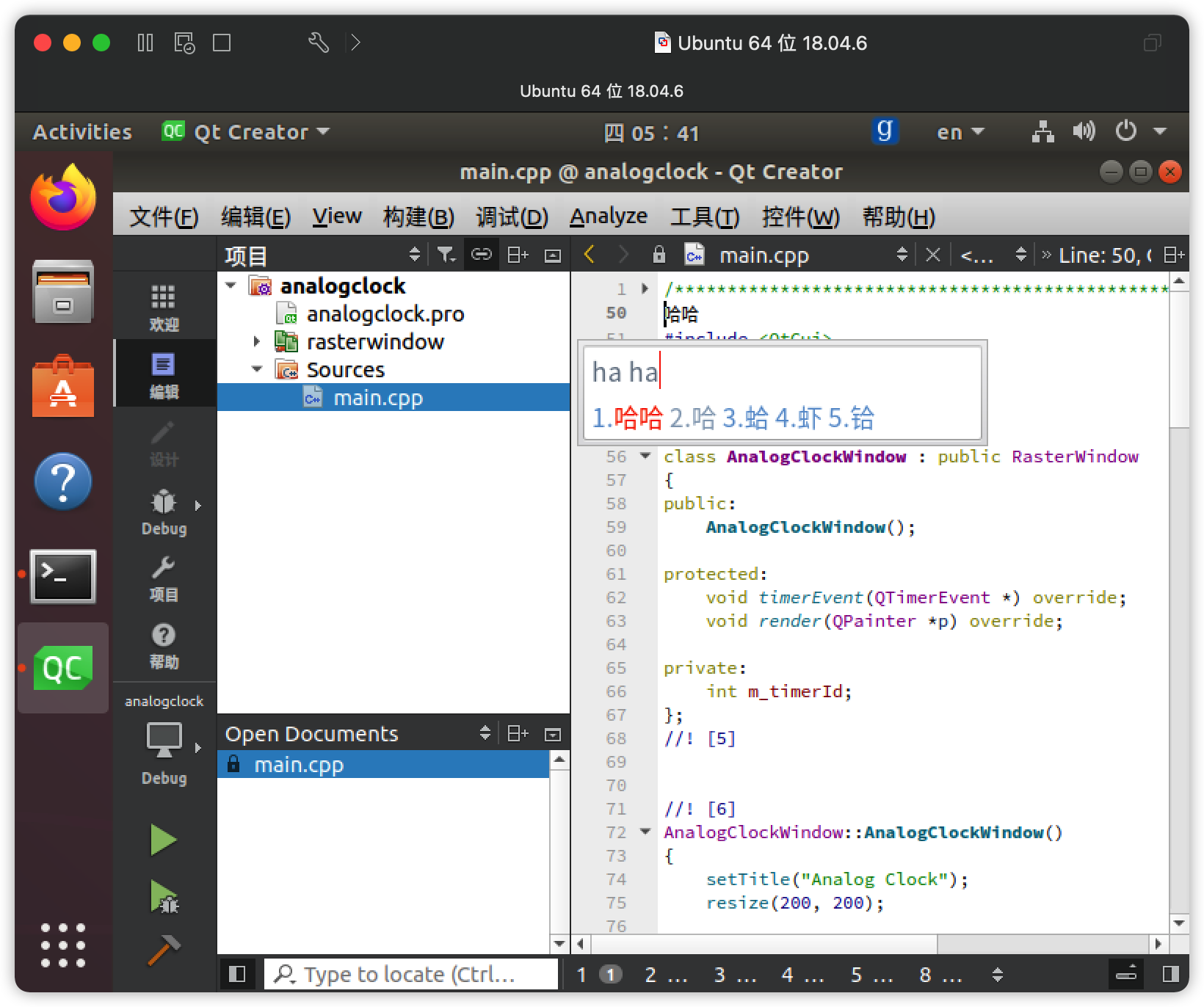
嵌入式Linux Qt开发:1、搭建基于ubuntu18.04的Qt开发环境及测试(解决Qt creator输入法问题)
一、前言 基本在我职业生涯开始时就已经在使用Qt进行一些上位机开发了,后续也有一些嵌入式设备用Qt开发,但是一直没有完整和系列的总结,包括C也是,这里慢慢补上一些总结,防止很多经验总结和学习过程又遗忘了ÿ…...
element-ui的el-cascader增加全选按钮实现(附源码)
最近遇到了在级联选择器上添加全选框的需求 ,但是项目使用的是Vue2 Element UI的架构,而我们都知道Element UI提供的级联选择器el-cascader是不支持全选框的,而我又没有在网上找到适合我项目的实现,索性自己实现一个组件…...

Scratch游戏 | 企鹅大乱斗
有没有过无聊到抓狂的时刻?试试这款 企鹅大乱斗 吧!超简单的玩法,让你瞬间告别无聊! 🎮 玩法超简单 等待屏幕出现 ”Go!” 疯狂点击,疯狂拍打企鹅! 💥 游戏特色 解压神器&#x…...

游戏行业DDoS攻击类型及防御分析
游戏行业作为DDoS攻击的高发领域,攻击类型复杂多样,结合多个来源的信息,以下是其主要攻击类型及特征分析: 1. 传统流量型DDoS攻击 UDP洪水攻击:通过大量UDP报文淹没服务器端口,消耗带宽资源,导…...
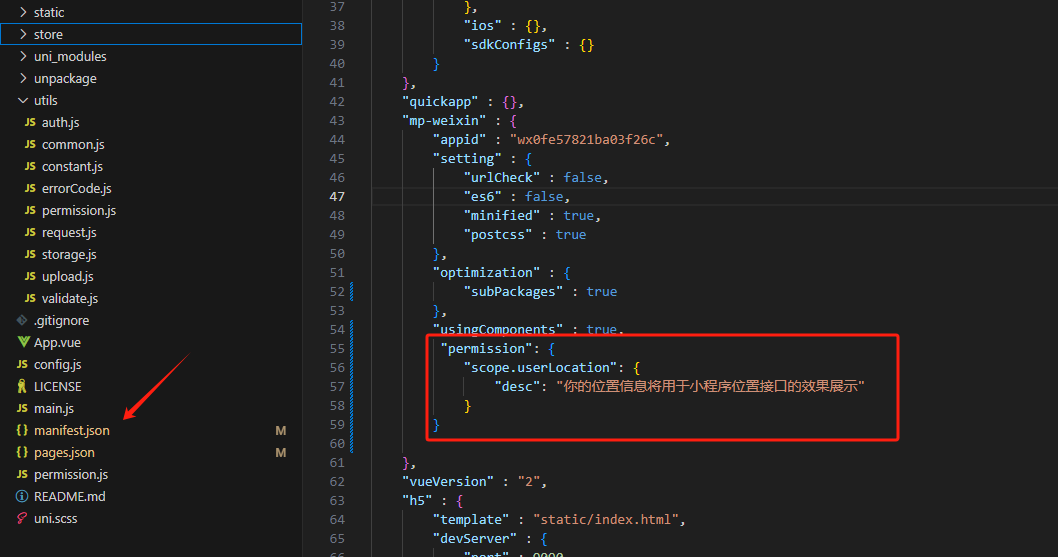
Uniapp中小程序调用腾讯地图(获取定位地址)
1、先配置权限: 这是上图的代码: "permission": { "scope.userLocation": { "desc": "你的位置信息将用于小程序位置接口的效果展示" } } 第二步:写代码: //下面是uniapp的模版代码 主…...
2025全网首发:ComfyUI整合GPT-Image-1完全指南 - 8步实现AI图像创作革命
ComfyUI整合GPT-Image-1完全指南:8步实现AI图像创作革命【2025最新】 OpenAI最新发布的GPT-Image-1模型(也就是ChatGPT-4o背后的图像生成技术)已经通过API开放使用,而令人惊喜的是,ComfyUI已经第一时间提供了完整支持&…...

利用SAP aATP产品分段策略应对订单关税挑战
本文探讨了如何通过在SAP S/4HANA系统中结合**产品分段(Product Segmentation)与高级可承诺性(aATP)**功能,帮助企业在全球化贸易中更有效地处理关税问题,并提升订单承诺的精准性。 产品分段与原产国&…...

工业4.0神经嫁接术:ethernet ip转profinet协议通信步骤图解
在现代工业自动化领域,不同品牌的设备和协议之间的兼容性问题一直是个挑战。我们的包装线项目就遇到了这样的难题:需要将Rockwell Allen-Bradley的EtherNet/IP伺服系统与西门子PLC的PROFINET主站进行无缝对接。为了解决这一问题,我们采用了et…...

深入理解反序列化攻击:原理、示例与利用工具实战
反序列化漏洞是现代 Web 安全中的一个高危攻击类型,常常导致远程代码执行(RCE)、文件读写、身份伪造等严重后果。本文将从基础原理讲起,结合实际代码和工具(PHPGGC、ysoserial)演示反序列化攻击的完整过程。…...

Qt原型模式实现与应用
在Qt中实现原型模式(Prototype Pattern)可以通过以下步骤完成。该模式的核心是通过克隆现有对象来创建新对象,而非通过传统的构造函数。以下是详细说明和示例: 1. 原型模式的核心概念 目的:避免重复初始化对象的高成本…...
:LeetCode 41. 缺失的第一个正数(First Missing Positive)详解)
Java详解LeetCode 热题 100(17):LeetCode 41. 缺失的第一个正数(First Missing Positive)详解
文章目录 1. 题目描述2. 理解题目3. 解法一:排序法(不满足题目要求)3.1 思路3.2 Java代码实现3.3 代码详解3.4 复杂度分析3.5 不足之处 4. 解法二:哈希表法4.1 思路4.2 Java代码实现4.3 代码详解4.4 复杂度分析4.5 不足之处 5. 解…...
)
[Java实战]Spring Boot + Netty 实现 TCP 长连接客户端及 RESTful 请求转发(二十六)
[Java实战]Spring Boot Netty 实现 TCP 长连接客户端及 RESTful 请求转发(二十六) 在现代微服务架构中,经常需要在不同服务之间进行高效、可靠的通信。本文将介绍如何使用 Spring Boot 结合 Netty 实现一个 TCP 长连接客户端,并…...
【Linux】动静态库的使用
📝前言: 这篇文章我们来讲讲Linux——动静态库的使用 🎬个人简介:努力学习ing 📋个人专栏:Linux 🎀CSDN主页 愚润求学 🌄其他专栏:C学习笔记,C语言入门基础&…...
Java基础(网络编程)
一、概述 目的:网络通信: 1、设备和设备 2、进程和进程 1)不同设备之间 2)本地设备之间 需要解决的问题: 如何准确地发送到对方的主机 - IP地址 - 唯一的定位网络中的一台主机 如何准确的发送到对方主机的进程 -…...
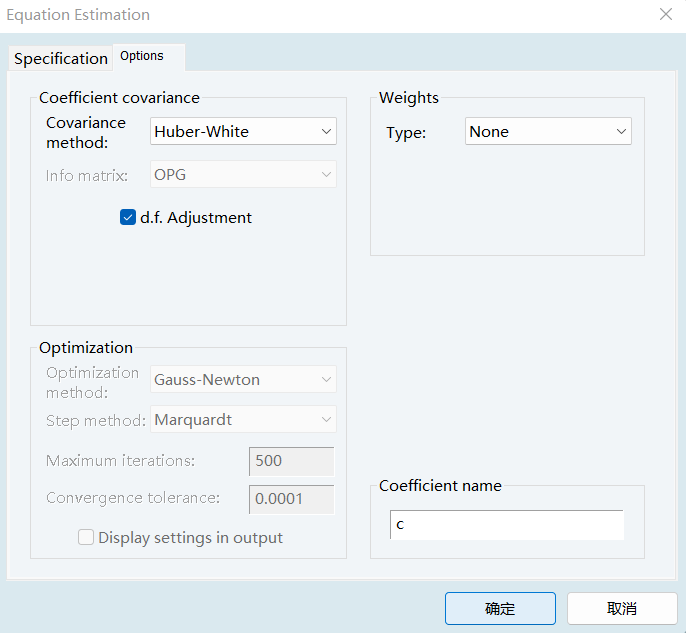
计量——异方差的检验及其修正
目录 1.异方差的检验 1 BP检验 2white检验 2.异方差的修正 1.异方差的检验 1 BP检验 选择检验方法:BP BP检验的实际步骤(非机器): 1.y对所有x进行回归,得到残差u。计算残差的平方u^2 2.u^2对所有x进行回归&#…...
学习C++的好书:C++编程之禅
历时四个月,把这本书看了一遍,受益匪浅,推荐给大家,系统的学习一遍C。...
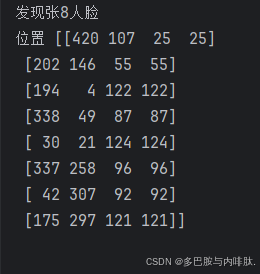
OpenCV进阶操作:人脸检测、微笑检测
文章目录 前言一、OpenCV如何实现人脸检测1、haar特征2、级联分类器3、级联分类器的使用 二、人脸检测、微笑检测 案例实现1、预处理2、加载分类器3、标注人脸4、运行结果:4、微笑检测 总结 前言 要实现人脸识别首先要判断当前图像中是否出现了人脸,这就…...

车载诊断进阶篇 --- 车载诊断概念
我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。 老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师: 钝感力的“钝”,不是木讷、迟钝,而是直面困境的韧劲和耐力,是面对外界噪音的通透淡然。 生活中有两种人,一种人格外在意别人的眼光;另一种人无论…...
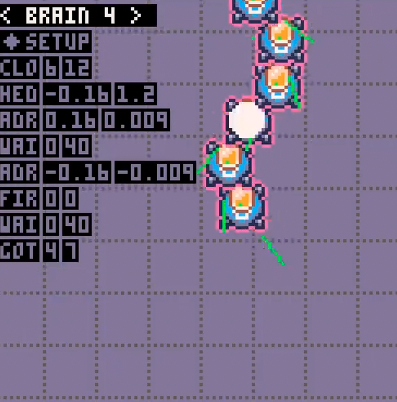
制作一款打飞机游戏49:敌人抖动
蛇形敌人 如果你玩过一些射击游戏(shmups),尤其是老式的射击游戏,你可能会遇到一种敌人,它们像蛇一样移动。我想在我们的游戏中实现这种效果。这种动态的感觉非常棒,我们完全有能力通过动画来实现它。 方…...

elementplus el-tree 二次封装支持配置删除后展示展开或折叠编辑复选框懒加载功能
本文介绍了基于 ElementPlus 的 el-tree 组件进行二次封装的 TreeView 组件,使用 Vue3 和 JavaScript 实现。TreeView 组件通过 props 接收树形数据、配置项等,支持懒加载、节点展开/收起、节点点击、删除、编辑等操作。组件内部通过 ref 管理树实例&…...

Pycharm IDEA加载大文件时报错:The file size exceeds configured limit
解决方案:配置一下idea.properties文件 文件里面写入代码: idea.max.intellisense.filesize50000重启IDEA即可;...

free void* 指令
https://stackoverflow.com/questions/2182103/is-it-ok-to-free-void free(ptr) 仅释放指针指向的内存,不会修改指针变量本身的值。调用后,ptr 仍然指向原来的地址(称为 "悬空指针"),但该地址对应的内存已…...

PDA手持终端应用有哪些?
随着技术进步不断拓展,PDA手持终端其便携性与多功能特性使其成为多行业数字化转型的核心工具。主要包括物流与仓储管理、零售行业、医疗行业以及制造业等。 1.物流与仓储管理 在物流与仓储管理中,PDA手持终端主要用于物品的实时跟踪、库存管理和拣货作业…...

Python模块化编程
Python模块化编程 记得我刚学Python那会儿,特别喜欢把所有代码都写在一个文件里。直到有一天,我的项目膨胀到了2000多行代码,每次修改都要翻半天…这才痛定思痛,开始研究模块化编程。今天就跟大家聊聊这个让代码变得优雅的魔法。…...

Linux性能分析工具perf
perf 工具详解 perf(Performance Counters for Linux)是 Linux 系统上的一个强大的性能分析工具,用于监控和分析系统及应用程序的性能。它基于 Linux 内核的 Performance Event Subsystem(perf_events),能…...

Android开发-使用内容组件获取通讯信息
在Android开发中,访问和处理用户的通讯信息(如联系人、通话记录等)是一项常见的需求。通过使用Android的内容提供者(ContentProvider),开发者可以方便地查询这些数据,并将其集成到自己的应用中。…...

文件目录与检索综合练习题
文章目录 前言一、基础部分二、参数应用三、参数进阶四、组合应用五、归档压缩六、统计与分析总结 前言 这部分练习题帮助大家更好的掌握命令 一、基础部分 1.用grep在error.log中查找所有含"Timeout"的行 2.使用find在/var/log下搜索7天内修改过的.log文件 3.对da…...