STC8H系列单片机STC8H_H头文件功能注释
#ifndef __STC8H_H__ // 条件编译:如果未定义__STC8H_H__宏
#define __STC8H_H__ // 则定义该宏,防止头文件被重复包含
/
//包含本头文件后,不用另外再包含"REG51.H" // 提示:本头文件已包含基本寄存器定义
sfr P0 = 0x80; // 定义特殊功能寄存器P0,地址为0x80
sbit P00 = P0^0; // 定义P0.0引脚,即P0寄存器的第0位
sbit P01 = P0^1; // 定义P0.1引脚,即P0寄存器的第1位
sbit P02 = P0^2; // 定义P0.2引脚,即P0寄存器的第2位
sbit P03 = P0^3; // 定义P0.3引脚,即P0寄存器的第3位
sbit P04 = P0^4; // 定义P0.4引脚,即P0寄存器的第4位
sbit P05 = P0^5; // 定义P0.5引脚,即P0寄存器的第5位
sbit P06 = P0^6; // 定义P0.6引脚,即P0寄存器的第6位
sbit P07 = P0^7; // 定义P0.7引脚,即P0寄存器的第7位
sfr SP = 0x81; // 堆栈指针寄存器,用于管理堆栈地址
sfr DPL = 0x82; // 数据指针低位寄存器,与DPH共同组成16位数据指针
sfr DPH = 0x83; // 数据指针高位寄存器,与DPL共同组成16位数据指针
sfr S4CON = 0x84; // 串口4控制寄存器,用于配置串口4的工作模式
sfr S4BUF = 0x85; // 串口4数据缓冲寄存器,用于存放串口4收发的数据
sfr PCON = 0x87; // 电源控制寄存器,用于配置单片机的电源模式和波特率倍增
sfr TCON = 0x88; // 定时器/计数器控制寄存器
sbit TF1 = TCON^7; // 定时器1溢出标志位
sbit TR1 = TCON^6; // 定时器1运行控制位
sbit TF0 = TCON^5; // 定时器0溢出标志位
sbit TR0 = TCON^4; // 定时器0运行控制位
sbit IE1 = TCON^3; // 外部中断1请求标志
sbit IT1 = TCON^2; // 外部中断1触发方式控制位
sbit IE0 = TCON^1; // 外部中断0请求标志
sbit IT0 = TCON^0; // 外部中断0触发方式控制位
sfr TMOD = 0x89; // 定时器/计数器模式控制寄存器,用于配置定时器工作模式
sfr TL0 = 0x8a; // 定时器0低位寄存器,存放定时器0的初始值
sfr TL1 = 0x8b; // 定时器1低位寄存器,存放定时器1的初始值
sfr TH0 = 0x8c; // 定时器0高位寄存器,存放定时器0的初始值
sfr TH1 = 0x8d; // 定时器1高位寄存器,存放定时器1的初始值
sfr AUXR = 0x8e; // 辅助寄存器,用于配置一些辅助功能
sfr INTCLKO = 0x8f; // 中断和时钟输出控制寄存器,用于配置中断和时钟输出
sfr P1 = 0x90; // 定义P1端口寄存器,地址为0x90
sbit P10 = P1^0; // 定义P1.0引脚,即P1寄存器的第0位
sbit P11 = P1^1; // 定义P1.1引脚,即P1寄存器的第1位
sbit P12 = P1^2; // 定义P1.2引脚,即P1寄存器的第2位
sbit P13 = P1^3; // 定义P1.3引脚,即P1寄存器的第3位
sbit P14 = P1^4; // 定义P1.4引脚,即P1寄存器的第4位
sbit P15 = P1^5; // 定义P1.5引脚,即P1寄存器的第5位
sbit P16 = P1^6; // 定义P1.6引脚,即P1寄存器的第6位
sbit P17 = P1^7; // 定义P1.7引脚,即P1寄存器的第7位
sfr P1M1 = 0x91; // P1端口模式寄存器1,用于配置P1口各引脚的工作模式
sfr P1M0 = 0x92; // P1端口模式寄存器0,与P1M1共同决定P1口引脚模式
sfr P0M1 = 0x93; // P0端口模式寄存器1,用于配置P0口各引脚的工作模式
sfr P0M0 = 0x94; // P0端口模式寄存器0,与P0M1共同决定P0口引脚模式
sfr P2M1 = 0x95; // P2端口模式寄存器1,用于配置P2口各引脚的工作模式
sfr P2M0 = 0x96; // P2端口模式寄存器0,与P2M1共同决定P2口引脚模式
sfr SCON = 0x98; // 串口1控制寄存器,用于配置串口1的工作模式和状态
sbit SM0 = SCON^7; // 串口1模式选择位0
sbit SM1 = SCON^6; // 串口1模式选择位1
sbit SM2 = SCON^5; // 串口1多机通信控制位
sbit REN = SCON^4; // 串口1接收使能位
sbit TB8 = SCON^3; // 串口1发送数据位8
sbit RB8 = SCON^2; // 串口1接收数据位8
sbit TI = SCON^1; // 串口1发送中断标志
sbit RI = SCON^0; // 串口1接收中断标志
sfr SBUF = 0x99; // 串口1数据缓冲寄存器,用于存放串口1收发的数据
sfr S2CON = 0x9a; // 串口2控制寄存器,用于配置串口2的工作模式和状态
sfr S2BUF = 0x9b; // 串口2数据缓冲寄存器,用于存放串口2收发的数据
sfr IRCBAND = 0x9d; // 内部RC振荡器频段控制寄存器,用于选择内部时钟的工作频段
sfr LIRTRIM = 0x9e; // 低频内部RC振荡器微调寄存器,用于精确调整低频内部时钟
sfr IRTRIM = 0x9f; // 内部RC振荡器微调寄存器,用于精确调整内部主时钟
sfr P2 = 0xa0; // 定义P2端口寄存器,地址为0xa0
sbit P20 = P2^0; // 定义P2.0引脚,即P2寄存器的第0位
sbit P21 = P2^1; // 定义P2.1引脚,即P2寄存器的第1位
sbit P22 = P2^2; // 定义P2.2引脚,即P2寄存器的第2位
sbit P23 = P2^3; // 定义P2.3引脚,即P2寄存器的第3位
sbit P24 = P2^4; // 定义P2.4引脚,即P2寄存器的第4位
sbit P25 = P2^5; // 定义P2.5引脚,即P2寄存器的第5位
sbit P26 = P2^6; // 定义P2.6引脚,即P2寄存器的第6位
sbit P27 = P2^7; // 定义P2.7引脚,即P2寄存器的第7位
sfr P_SW1 = 0xa2; // 外设端口切换寄存器1,用于切换UART、SPI等外设的IO口映射
sfr IE = 0xa8; // 中断使能寄存器,控制所有中断的开启和关闭
sbit EA = IE^7; // 全局中断使能位,1=开启所有中断,0=关闭所有中断
sbit ELVD = IE^6; // 低压检测中断使能位
sbit EADC = IE^5; // ADC转换完成中断使能位
sbit ES = IE^4; // 串口1(UART1)中断使能位
sbit ET1 = IE^3; // 定时器1中断使能位
sbit EX1 = IE^2; // 外部中断1使能位
sbit ET0 = IE^1; // 定时器0中断使能位
sbit EX0 = IE^0; // 外部中断0使能位
sfr SADDR = 0xa9; // 串口1从机地址寄存器,用于多机通信
sfr WKTCL = 0xaa; // 看门狗定时器低8位寄存器,用于配置看门狗定时时间
sfr WKTCH = 0xab; // 看门狗定时器高8位寄存器,用于配置看门狗定时时间
sfr S3CON = 0xac; // 串口3控制寄存器,用于配置串口3的工作模式和状态
sfr S3BUF = 0xad; // 串口3数据缓冲寄存器,用于存放串口3收发的数据
sfr TA = 0xae; // 特殊功能寄存器访问授权键,用于解锁某些特殊寄存器
sfr IE2 = 0xaf; // 中断使能寄存器2,控制额外中断源的开启和关闭
sfr P3 = 0xb0; // 定义P3端口寄存器,地址为0xb0
sbit P30 = P3^0; // 定义P3.0引脚(RXD/UART1接收端)
sbit P31 = P3^1; // 定义P3.1引脚(TXD/UART1发送端)
sbit P32 = P3^2; // 定义P3.2引脚(INT0/外部中断0)
sbit P33 = P3^3; // 定义P3.3引脚(INT1/外部中断1)
sbit P34 = P3^4; // 定义P3.4引脚(T0/定时器0外部输入)
sbit P35 = P3^5; // 定义P3.5引脚(T1/定时器1外部输入)
sbit P36 = P3^6; // 定义P3.6引脚(WR/外部数据存储器写选通)
sbit P37 = P3^7; // 定义P3.7引脚(RD/外部数据存储器读选通)
sfr P3M1 = 0xb1; // P3端口模式寄存器1,配置P3口各引脚工作模式
sfr P3M0 = 0xb2; // P3端口模式寄存器0,与P3M1共同决定P3口引脚模式
sfr P4M1 = 0xb3; // P4端口模式寄存器1,配置P4口各引脚工作模式
sfr P4M0 = 0xb4; // P4端口模式寄存器0,与P4M1共同决定P4口引脚模式
sfr IP2 = 0xb5; // 中断优先级控制寄存器2(低8位)
sfr IP2H = 0xb6; // 中断优先级控制寄存器2(高8位)
sfr IPH = 0xb7; // 中断优先级控制寄存器高8位
sfr IP = 0xb8; // 中断优先级控制寄存器低8位
sbit PPCA = IP^7; // PCA模块中断优先级控制位
sbit PLVD = IP^6; // 低压检测中断优先级控制位
sbit PADC = IP^5; // ADC转换中断优先级控制位
sbit PS = IP^4; // 串口1中断优先级控制位
sbit PT1 = IP^3; // 定时器1中断优先级控制位
sbit PX1 = IP^2; // 外部中断1优先级控制位
sbit PT0 = IP^1; // 定时器0中断优先级控制位
sbit PX0 = IP^0; // 外部中断0优先级控制位
sfr SADEN = 0xb9; // 串口1从机地址掩码寄存器,用于多机通信
sfr P_SW2 = 0xba; // 外设端口切换寄存器2,控制部分外设的IO口映射
sfr ADC_CONTR = 0xbc; // ADC控制寄存器,配置ADC工作模式和启动转换
sfr ADC_RES = 0xbd; // ADC转换结果高8位寄存器
sfr ADC_RESL = 0xbe; // ADC转换结果低2位寄存器
sfr P4 = 0xc0; // 定义P4端口寄存器,地址为0xc0
sbit P40 = P4^0; // 定义P4.0引脚
sbit P41 = P4^1; // 定义P4.1引脚
sbit P42 = P4^2; // 定义P4.2引脚
sbit P43 = P4^3; // 定义P4.3引脚
sbit P44 = P4^4; // 定义P4.4引脚
sbit P45 = P4^5; // 定义P4.5引脚(通常用作外部中断2)
sbit P46 = P4^6; // 定义P4.6引脚(通常用作外部中断3)
sbit P47 = P4^7; // 定义P4.7引脚
sfr WDT_CONTR = 0xc1; // 看门狗定时器控制寄存器
sfr IAP_DATA = 0xc2; // ISP/IAP数据寄存器,用于Flash数据读写
sfr IAP_ADDRH = 0xc3; // ISP/IAP地址高8位寄存器
sfr IAP_ADDRL = 0xc4; // ISP/IAP地址低8位寄存器
sfr IAP_CMD = 0xc5; // ISP/IAP命令寄存器
sfr IAP_TRIG = 0xc6; // ISP/IAP触发寄存器,写入特定序列触发命令
sfr IAP_CONTR = 0xc7; // ISP/IAP控制寄存器
sfr P5 = 0xc8; // 定义P5端口寄存器,地址为0xc8
sbit P50 = P5^0; // 定义P5.0引脚(部分型号用作XTAL2/外部晶振输出)
sbit P51 = P5^1; // 定义P5.1引脚(部分型号用作XTAL1/外部晶振输入)
sbit P52 = P5^2; // 定义P5.2引脚(部分型号用作RST/复位输入)
sbit P53 = P5^3; // 定义P5.3引脚(部分型号用作ALE/PROG/地址锁存使能)
sbit P54 = P5^4; // 定义P5.4引脚(部分型号用作PSEN/外部程序存储器读选通)
sbit P55 = P5^5; // 定义P5.5引脚(部分型号用作EA/VPP/外部程序存储器选择)
sbit P56 = P5^6; // 定义P5.6引脚(部分型号用作ADC10/第10通道ADC输入)
sbit P57 = P5^7; // 定义P5.7引脚(部分型号用作ADC11/第11通道ADC输入)
sfr P5M1 = 0xc9; // P5端口模式寄存器1,配置P5口各引脚工作模式
sfr P5M0 = 0xca; // P5端口模式寄存器0,与P5M1共同决定P5口引脚模式
sfr P6M1 = 0xcb; // P6端口模式寄存器1,配置P6口各引脚工作模式
sfr P6M0 = 0xcc; // P6端口模式寄存器0,与P6M1共同决定P6口引脚模式
sfr SPSTAT = 0xcd; // SPI状态寄存器,指示SPI通信状态
sfr SPCTL = 0xce; // SPI控制寄存器,配置SPI工作模式
sfr SPDAT = 0xcf; // SPI数据寄存器,存放SPI发送/接收的数据
sfr PSW = 0xd0; // 程序状态字寄存器,保存CPU状态信息
sbit CY = PSW^7; // 进位标志位,用于算术运算进位/借位
sbit AC = PSW^6; // 辅助进位标志位,用于BCD码运算
sbit F0 = PSW^5; // 用户标志位0,可由用户自定义使用
sbit RS1 = PSW^4; // 寄存器组选择位1
sbit RS0 = PSW^3; // 寄存器组选择位0
sbit OV = PSW^2; // 溢出标志位,用于带符号数运算
sbit F1 = PSW^1; // 用户标志位1,可由用户自定义使用
sbit P = PSW^0; // 奇偶校验标志位,反映累加器A中1的个数奇偶性
sfr T4T3M = 0xd1; // 定时器3/4模式控制寄存器
sfr T4H = 0xd2; // 定时器4高8位寄存器
sfr T4L = 0xd3; // 定时器4低8位寄存器
sfr T3H = 0xd4; // 定时器3高8位寄存器
sfr T3L = 0xd5; // 定时器3低8位寄存器
sfr T2H = 0xd6; // 定时器2高8位寄存器
sfr T2L = 0xd7; // 定时器2低8位寄存器
sfr USBCLK = 0xdc; // USB时钟控制寄存器(重复定义,与PLLCR地址冲突)
sfr PLLCR = 0xdc; // 锁相环控制寄存器,配置系统时钟倍频
sfr ADCCFG = 0xde; // ADC配置寄存器
sfr IP3 = 0xdf; // 中断优先级控制寄存器3
sfr ACC = 0xe0; // 累加器寄存器,8051核心寄存器之一
sfr P7M1 = 0xe1; // P7端口模式寄存器1,配置P7口各引脚工作模式
sfr P7M0 = 0xe2; // P7端口模式寄存器0,与P7M1共同决定P7口引脚模式
sfr DPS = 0xe3; // 数据指针选择寄存器,选择使用DPTR0还是DPTR1
sfr DPL1 = 0xe4; // 数据指针1低位寄存器
sfr DPH1 = 0xe5; // 数据指针1高位寄存器
sfr CMPCR1 = 0xe6; // 比较器控制寄存器1
sfr CMPCR2 = 0xe7; // 比较器控制寄存器2
sfr P6 = 0xe8; // 定义P6端口寄存器,地址为0xe8
sbit P60 = P6^0; // 定义P6.0引脚
sbit P61 = P6^1; // 定义P6.1引脚
sbit P62 = P6^2; // 定义P6.2引脚
sbit P63 = P6^3; // 定义P6.3引脚
sbit P64 = P6^4; // 定义P6.4引脚
sbit P65 = P6^5; // 定义P6.5引脚
sbit P66 = P6^6; // 定义P6.6引脚
sbit P67 = P6^7; // 定义P6.7引脚
/* USB控制器相关寄存器 */
sfr USBDAT = 0xec; /* USB数据寄存器 - 用于USB数据的读写操作 */
/* 中断相关寄存器 */
sfr IP3H = 0xee; /* 中断优先级控制寄存器3高8位 - 用于设置高级中断优先级 */
sfr AUXINTIF = 0xef; /* 辅助中断标志寄存器 - 包含各种辅助功能的中断标志位 */
/* 通用寄存器 */
sfr B = 0xf0; /* B寄存器 - 8051架构中的通用寄存器,常用于乘除法运算 */
/* USB控制器相关寄存器 */
sfr USBCON = 0xf4; /* USB控制寄存器 - 配置USB工作模式和状态控制 */
/* 通用寄存器 */
sfr IAP_TPS = 0xf5; /* IAP时间参数寄存器 - 用于设置IAP(在应用编程)操作的时序参数 */
/* I/O端口定义 */
sfr P7 = 0xf8; /* 端口7寄存器 - 8位I/O端口,可单独访问每个引脚 */
sbit P70 = P7^0; /* 端口7第0位 - 可单独操作的I/O引脚 */
sbit P71 = P7^1; /* 端口7第1位 - 可单独操作的I/O引脚 */
sbit P72 = P7^2; /* 端口7第2位 - 可单独操作的I/O引脚 */
sbit P73 = P7^3; /* 端口7第3位 - 可单独操作的I/O引脚 */
sbit P74 = P7^4; /* 端口7第4位 - 可单独操作的I/O引脚 */
sbit P75 = P7^5; /* 端口7第5位 - 可单独操作的I/O引脚 */
sbit P76 = P7^6; /* 端口7第6位 - 可单独操作的I/O引脚 */
sbit P77 = P7^7; /* 端口7第7位 - 可单独操作的I/O引脚 */
/**
* USB地址寄存器 (USB Address Register)
* 地址: 0xFC
* 功能: 用于配置USB端点地址和控制USB数据传输的地址相关操作
* 说明: 通过该寄存器可以设置USB设备的地址,影响USB通信的目标地址
*/
sfr USBADR = 0xfc;
/**
* 复位配置寄存器 (Reset Configuration Register)
* 地址: 0xFF
* 功能: 控制和配置单片机的复位源和复位行为
* 说明: 可以设置哪些事件会触发复位,以及复位后的系统状态
*/
sfr RSTCFG = 0xff;
//如下特殊功能寄存器位于扩展RAM区域
//访问这些寄存器,需先将P_SW2的BIT7设置为1,才可正常读写
/
//FF00H-FFFFH
/
/
//FE00H-FEFFH
/
/* 时钟源选择寄存器 */
#define CLKSEL (*(unsigned char volatile xdata *)0xfe00)
/* 功能:选择系统主时钟源及配置相关时钟输出
* 位定义:
* BIT7-BIT6: 主时钟源选择 (00=内部高精度IRC, 01=外部晶体, 10=32KHz振荡器, 11=保留)
* BIT5: 时钟输出使能位
* BIT4-BIT0: 时钟分频系数设置
*/
/* 时钟分频寄存器 */
#define CLKDIV (*(unsigned char volatile xdata *)0xfe01)
/* 功能:设置系统时钟分频系数
* 取值范围:0-255
* 系统时钟 = 时钟源频率 / (CLKDIV + 1)
*/
/* 内部高精度RC振荡器控制寄存器 */
#define HIRCCR (*(unsigned char volatile xdata *)0xfe02)
/* 功能:控制内部高精度RC振荡器(通常为24-33MHz)
* 位定义:
* BIT7: HIRC使能位 (1=使能, 0=禁用)
* BIT6: HIRC就绪标志位 (1=就绪, 0=未就绪)
* BIT5: HIRC频率微调方向
* BIT4-BIT0: HIRC频率微调值
*/
/* 外部晶振控制寄存器 */
#define XOSCCR (*(unsigned char volatile xdata *)0xfe03)
/* 功能:控制外部晶振(XTAL)工作
* 位定义:
* BIT7: XOSC使能位 (1=使能, 0=禁用)
* BIT6: XOSC就绪标志位 (1=就绪, 0=未就绪)
* BIT5: 外部时钟输入模式选择
* BIT4-BIT3: 晶振启动增益控制
* BIT2-BIT0: 保留
*/
/* 32KHz内部RC振荡器控制寄存器 */
#define IRC32KCR (*(unsigned char volatile xdata *)0xfe04)
/* 功能:控制内部32KHz RC振荡器
* 位定义:
* BIT7: IRC32K使能位 (1=使能, 0=禁用)
* BIT6: IRC32K就绪标志位 (1=就绪, 0=未就绪)
* BIT5-BIT0: IRC32K频率微调值
*/
/* 主时钟输出控制寄存器 */
#define MCLKOCR (*(unsigned char volatile xdata *)0xfe05)
/* 功能:控制主时钟输出(MCLKO)引脚
* 位定义:
* BIT7: MCLKO输出使能位
* BIT6-BIT4: 输出时钟源选择
* BIT3-BIT0: 输出时钟分频系数
*/
/* 内部RC振荡器数据缓冲区 */
#define IRCDB (*(unsigned char volatile xdata *)0xfe06)
/* 功能:存储内部RC振荡器的校准数据
* 说明:通常由ISP编程时自动写入,用户一般不需要修改
*/
/* 48MHz内部RC振荡器控制寄存器 */
#define IRC48MCR (*(unsigned char volatile xdata *)0xfe07)
/* 功能:控制内部48MHz RC振荡器(用于USB等高速通信)
* 位定义:
* BIT7: IRC48M使能位 (1=使能, 0=禁用)
* BIT6: IRC48M就绪标志位 (1=就绪, 0=未就绪)
* BIT5: IRC48M频率微调方向
* BIT4-BIT0: IRC48M频率微调值
*/
/* 32.768KHz外部晶振控制寄存器 */
#define X32KCR (*(unsigned char volatile xdata *)0xfe08)
/* 功能:控制外部32.768KHz晶振(通常用于RTC)
* 位定义:
* BIT7: X32K使能位 (1=使能, 0=禁用)
* BIT6: X32K就绪标志位 (1=就绪, 0=未就绪)
* BIT5: X32K低功耗模式
* BIT4-BIT0: 保留
*/
/* 高速时钟分频寄存器 */
#define HSCLKDIV (*(unsigned char volatile xdata *)0xfe0b)
/* 功能:设置高速外设时钟分频系数
* 说明:用于USB、SPI等高速外设的时钟分频
*/
/* 端口0上拉电阻控制寄存器 */
#define P0PU (*(unsigned char volatile xdata *)0xfe10)
/* 功能:控制P0端口各引脚的内部上拉电阻
* 位定义:
* BIT7: P0.7上拉控制 (1=使能上拉, 0=禁用上拉)
* BIT6: P0.6上拉控制
* ...
* BIT0: P0.0上拉控制
*/
/* 端口1上拉电阻控制寄存器 */
#define P1PU (*(unsigned char volatile xdata *)0xfe11)
/* 功能:控制P1端口各引脚的内部上拉电阻
* 位定义:
* BIT7: P1.7上拉控制
* ...
* BIT0: P1.0上拉控制
*/
/* 端口2上拉电阻控制寄存器 */
#define P2PU (*(unsigned char volatile xdata *)0xfe12)
/* 功能:控制P2端口各引脚的内部上拉电阻
* 位定义:
* BIT7: P2.7上拉控制
* ...
* BIT0: P2.0上拉控制
*/
/* 端口3上拉电阻控制寄存器 */
#define P3PU (*(unsigned char volatile xdata *)0xfe13)
/* 功能:控制P3端口各引脚的内部上拉电阻
* 位定义:
* BIT7: P3.7上拉控制
* ...
* BIT0: P3.0上拉控制
*/
/* 端口4上拉电阻控制寄存器 */
#define P4PU (*(unsigned char volatile xdata *)0xfe14)
/* 功能:控制P4端口各引脚的内部上拉电阻
* 位定义:
* BIT7: P4.7上拉控制
* ...
* BIT0: P4.0上拉控制
*/
/* 端口5上拉电阻控制寄存器 */
#define P5PU (*(unsigned char volatile xdata *)0xfe15)
/* 功能:控制P5端口各引脚的内部上拉电阻
* 位定义:
* BIT7: P5.7上拉控制
* ...
* BIT0: P5.0上拉控制
*/
/* 端口6上拉电阻控制寄存器 */
#define P6PU (*(unsigned char volatile xdata *)0xfe16)
/* 功能:控制P6端口各引脚的内部上拉电阻
* 位定义:
* BIT7: P6.7上拉控制
* ...
* BIT0: P6.0上拉控制
*/
/* 端口7上拉电阻控制寄存器 */
#define P7PU (*(unsigned char volatile xdata *)0xfe17)
/* 功能:控制P7端口各引脚的内部上拉电阻
* 位定义:
* BIT7: P7.7上拉控制
* ...
* BIT0: P7.0上拉控制
*/
/* 使用说明:
* 1. 当引脚配置为输入模式时,启用上拉可防止引脚浮空
* 2. 对于推挽输出模式,上拉设置无效
* 3. 外部已连接上拉电阻的情况下,可禁用内部上拉避免冲突
* 4. 低功耗应用中,未使用的引脚建议禁用上拉以降低功耗
*/
/* 端口0开漏输出控制寄存器 */
#define P0NCS (*(unsigned char volatile xdata *)0xfe18)
/* 功能:控制P0端口各引脚的开漏输出模式
* 位定义:
* BIT7: P0.7开漏控制 (1=开漏输出, 0=推挽/准双向)
* BIT6: P0.6开漏控制
* ...
* BIT0: P0.0开漏控制
* 说明:开漏输出模式下,引脚只能输出低电平或高阻态,需外部上拉电阻
*/
/* 端口1开漏输出控制寄存器 */
#define P1NCS (*(unsigned char volatile xdata *)0xfe19)
/* 功能:控制P1端口各引脚的开漏输出模式
* 位定义:
* BIT7: P1.7开漏控制
* ...
* BIT0: P1.0开漏控制
*/
/* 端口2开漏输出控制寄存器 */
#define P2NCS (*(unsigned char volatile xdata *)0xfe1a)
/* 功能:控制P2端口各引脚的开漏输出模式
* 位定义:
* BIT7: P2.7开漏控制
* ...
* BIT0: P2.0开漏控制
*/
/* 端口3开漏输出控制寄存器 */
#define P3NCS (*(unsigned char volatile xdata *)0xfe1b)
/* 功能:控制P3端口各引脚的开漏输出模式
* 位定义:
* BIT7: P3.7开漏控制
* ...
* BIT0: P3.0开漏控制
*/
/* 端口4开漏输出控制寄存器 */
#define P4NCS (*(unsigned char volatile xdata *)0xfe1c)
/* 功能:控制P4端口各引脚的开漏输出模式
* 位定义:
* BIT7: P4.7开漏控制
* ...
* BIT0: P4.0开漏控制
*/
/* 端口5开漏输出控制寄存器 */
#define P5NCS (*(unsigned char volatile xdata *)0xfe1d)
/* 功能:控制P5端口各引脚的开漏输出模式
* 位定义:
* BIT7: P5.7开漏控制
* ...
* BIT0: P5.0开漏控制
*/
/* 端口6开漏输出控制寄存器 */
#define P6NCS (*(unsigned char volatile xdata *)0xfe1e)
/* 功能:控制P6端口各引脚的开漏输出模式
* 位定义:
* BIT7: P6.7开漏控制
* ...
* BIT0: P6.0开漏控制
*/
/* 端口7开漏输出控制寄存器 */
#define P7NCS (*(unsigned char volatile xdata *)0xfe1f)
/* 功能:控制P7端口各引脚的开漏输出模式
* 位定义:
* BIT7: P7.7开漏控制
* ...
* BIT0: P7.0开漏控制
*/
/* 使用说明:
* 1. 开漏输出模式常用于I2C、SMBus等需要线与功能的总线接口
* 2. 配置为开漏模式后,需外部上拉电阻才能实现高电平输出
* 3. 开漏输出高阻态时,引脚电平由外部电路决定
* 4. 需配合端口模式寄存器(PnM1/PnM0)共同配置I/O模式
*/
/* 端口0输出速度控制寄存器 */
#define P0SR (*(unsigned char volatile xdata *)0xfe20)
/* 功能:控制P0端口各引脚的输出驱动速度
* 位定义:
* BIT7-BIT6: P0.7输出速度控制 (00=低速, 01=中速, 10=高速, 11=超高速)
* BIT5-BIT4: P0.6输出速度控制
* ...
* BIT1-BIT0: P0.0输出速度控制
* 说明:较高的输出速度可提高信号上升/下降沿速率,但会增加EMI和功耗
*/
/* 端口1输出速度控制寄存器 */
#define P1SR (*(unsigned char volatile xdata *)0xfe21)
/* 功能:控制P1端口各引脚的输出驱动速度
* 位定义:
* BIT7-BIT6: P1.7输出速度控制
* ...
* BIT1-BIT0: P1.0输出速度控制
*/
/* 端口2输出速度控制寄存器 */
#define P2SR (*(unsigned char volatile xdata *)0xfe22)
/* 功能:控制P2端口各引脚的输出驱动速度
* 位定义:
* BIT7-BIT6: P2.7输出速度控制
* ...
* BIT1-BIT0: P2.0输出速度控制
*/
/* 端口3输出速度控制寄存器 */
#define P3SR (*(unsigned char volatile xdata *)0xfe23)
/* 功能:控制P3端口各引脚的输出驱动速度
* 位定义:
* BIT7-BIT6: P3.7输出速度控制
* ...
* BIT1-BIT0: P3.0输出速度控制
*/
/* 端口4输出速度控制寄存器 */
#define P4SR (*(unsigned char volatile xdata *)0xfe24)
/* 功能:控制P4端口各引脚的输出驱动速度
* 位定义:
* BIT7-BIT6: P4.7输出速度控制
* ...
* BIT1-BIT0: P4.0输出速度控制
*/
/* 端口5输出速度控制寄存器 */
#define P5SR (*(unsigned char volatile xdata *)0xfe25)
/* 功能:控制P5端口各引脚的输出驱动速度
* 位定义:
* BIT7-BIT6: P5.7输出速度控制
* ...
* BIT1-BIT0: P5.0输出速度控制
*/
/* 端口6输出速度控制寄存器 */
#define P6SR (*(unsigned char volatile xdata *)0xfe26)
/* 功能:控制P6端口各引脚的输出驱动速度
* 位定义:
* BIT7-BIT6: P6.7输出速度控制
* ...
* BIT1-BIT0: P6.0输出速度控制
*/
/* 端口7输出速度控制寄存器 */
#define P7SR (*(unsigned char volatile xdata *)0xfe27)
/* 功能:控制P7端口各引脚的输出驱动速度
* 位定义:
* BIT7-BIT6: P7.7输出速度控制
* ...
* BIT1-BIT0: P7.0输出速度控制
*/
/* 使用说明:
* 1. 高速模式适用于高频信号传输,但可能增加电磁干扰
* 2. 低速模式可降低功耗和EMI,适合低频或对噪声敏感的应用
* 3. 每个引脚可独立配置输出速度,以优化系统性能
* 4. 对于容性负载或长线驱动,建议提高输出速度以保证信号质量
*/
/* 端口0驱动能力控制寄存器 */
#define P0DR (*(unsigned char volatile xdata *)0xfe28)
/* 功能:控制P0端口各引脚的输出驱动电流能力
* 位定义:
* BIT7: P0.7驱动能力控制 (1=强驱动, 0=标准驱动)
* BIT6: P0.6驱动能力控制
* ...
* BIT0: P0.0驱动能力控制
* 说明:强驱动模式可提供更大的输出电流,适用于驱动LED等负载
*/
/* 端口1驱动能力控制寄存器 */
#define P1DR (*(unsigned char volatile xdata *)0xfe29)
/* 功能:控制P1端口各引脚的输出驱动电流能力
* 位定义:
* BIT7: P1.7驱动能力控制
* ...
* BIT0: P1.0驱动能力控制
*/
/* 端口2驱动能力控制寄存器 */
#define P2DR (*(unsigned char volatile xdata *)0xfe2a)
/* 功能:控制P2端口各引脚的输出驱动电流能力
* 位定义:
* BIT7: P2.7驱动能力控制
* ...
* BIT0: P2.0驱动能力控制
*/
/* 端口3驱动能力控制寄存器 */
#define P3DR (*(unsigned char volatile xdata *)0xfe2b)
/* 功能:控制P3端口各引脚的输出驱动电流能力
* 位定义:
* BIT7: P3.7驱动能力控制
* ...
* BIT0: P3.0驱动能力控制
*/
/* 端口4驱动能力控制寄存器 */
#define P4DR (*(unsigned char volatile xdata *)0xfe2c)
/* 功能:控制P4端口各引脚的输出驱动电流能力
* 位定义:
* BIT7: P4.7驱动能力控制
* ...
* BIT0: P4.0驱动能力控制
*/
/* 端口5驱动能力控制寄存器 */
#define P5DR (*(unsigned char volatile xdata *)0xfe2d)
/* 功能:控制P5端口各引脚的输出驱动电流能力
* 位定义:
* BIT7: P5.7驱动能力控制
* ...
* BIT0: P5.0驱动能力控制
*/
/* 端口6驱动能力控制寄存器 */
#define P6DR (*(unsigned char volatile xdata *)0xfe2e)
/* 功能:控制P6端口各引脚的输出驱动电流能力
* 位定义:
* BIT7: P6.7驱动能力控制
* ...
* BIT0: P6.0驱动能力控制
*/
/* 端口7驱动能力控制寄存器 */
#define P7DR (*(unsigned char volatile xdata *)0xfe2f)
/* 功能:控制P7端口各引脚的输出驱动电流能力
* 位定义:
* BIT7: P7.7驱动能力控制
* ...
* BIT0: P7.0驱动能力控制
*/
/* 使用说明:
* 1. 强驱动模式可提供更大的拉/灌电流能力(典型值约20mA)
* 2. 标准驱动模式适合常规数字信号传输(典型值约8mA)
* 3. 所有引脚默认处于标准驱动模式
* 4. 过多使用强驱动模式可能增加系统功耗和电磁干扰
* 5. 驱动LED等大功率负载时,建议使用外部驱动电路
*/
/* 端口0中断使能控制寄存器 */
#define P0IE (*(unsigned char volatile xdata *)0xfe30)
/* 功能:控制P0端口各引脚的外部中断使能
* 位定义:
* BIT7: P0.7中断使能 (1=使能, 0=禁用)
* BIT6: P0.6中断使能
* ...
* BIT0: P0.0中断使能
* 说明:配合PIOIF寄存器使用,需设置相应的中断触发方式
*/
/* 端口1中断使能控制寄存器 */
#define P1IE (*(unsigned char volatile xdata *)0xfe31)
/* 功能:控制P1端口各引脚的外部中断使能
* 位定义:
* BIT7: P1.7中断使能
* ...
* BIT0: P1.0中断使能
*/
/* 端口2中断使能控制寄存器 */
#define P2IE (*(unsigned char volatile xdata *)0xfe32)
/* 功能:控制P2端口各引脚的外部中断使能
* 位定义:
* BIT7: P2.7中断使能
* ...
* BIT0: P2.0中断使能
*/
/* 端口3中断使能控制寄存器 */
#define P3IE (*(unsigned char volatile xdata *)0xfe33)
/* 功能:控制P3端口各引脚的外部中断使能
* 位定义:
* BIT7: P3.7中断使能
* ...
* BIT0: P3.0中断使能
*/
/* 端口4中断使能控制寄存器 */
#define P4IE (*(unsigned char volatile xdata *)0xfe34)
/* 功能:控制P4端口各引脚的外部中断使能
* 位定义:
* BIT7: P4.7中断使能
* ...
* BIT0: P4.0中断使能
*/
/* 端口5中断使能控制寄存器 */
#define P5IE (*(unsigned char volatile xdata *)0xfe35)
/* 功能:控制P5端口各引脚的外部中断使能
* 位定义:
* BIT7: P5.7中断使能
* ...
* BIT0: P5.0中断使能
*/
/* 端口6中断使能控制寄存器 */
#define P6IE (*(unsigned char volatile xdata *)0xfe36)
/* 功能:控制P6端口各引脚的外部中断使能
* 位定义:
* BIT7: P6.7中断使能
* ...
* BIT0: P6.0中断使能
*/
/* 端口7中断使能控制寄存器 */
#define P7IE (*(unsigned char volatile xdata *)0xfe37)
/* 功能:控制P7端口各引脚的外部中断使能
* 位定义:
* BIT7: P7.7中断使能
* ...
* BIT0: P7.0中断使能
*/
/* 使用说明:
* 1. 需配合PIOCR寄存器设置中断触发方式(上升沿/下降沿/双边沿/低电平)
* 2. 中断标志位位于PIOIF寄存器中,中断处理后需手动清除
* 3. 所有引脚默认禁用中断
* 4. 外部中断优先级由PIPO和PIPH寄存器共同控制
* 5. 低电平触发的中断需在中断处理函数中确保引脚电平恢复高电平
*/
/* LCD接口配置寄存器 */
#define LCMIFCFG (*(unsigned char volatile xdata *)0xfe50)
/* 功能:配置LCD接口的基本工作模式和参数
* 位定义:
* BIT7-BIT6: 接口类型选择 (00=8080并行, 01=SPI, 10=I2C, 11=保留)
* BIT5: 数据传输方向控制 (1=双向, 0=单向)
* BIT4: 自动刷新使能
* BIT3-BIT2: 数据宽度设置 (00=8位, 01=16位, 10=9位, 11=保留)
* BIT1: 帧同步信号极性
* BIT0: 时钟信号极性
*/
/* LCD接口配置寄存器2 */
#define LCMIFCFG2 (*(unsigned char volatile xdata *)0xfe51)
/* 功能:配置LCD接口的高级参数
* 位定义:
* BIT7: 硬件流控制使能
* BIT6: 双缓冲模式使能
* BIT5: 自动地址递增模式
* BIT4: 数据端对齐方式
* BIT3: 帧同步信号使能
* BIT2: 行同步信号极性
* BIT1: 像素时钟分频系数选择
* BIT0: 保留
*/
/* LCD接口控制寄存器 */
#define LCMIFCR (*(unsigned char volatile xdata *)0xfe52)
/* 功能:控制LCD接口的操作和状态
* 位定义:
* BIT7: 接口使能位 (1=使能, 0=禁用)
* BIT6: 开始数据传输
* BIT5: 复位接口
* BIT4: 暂停传输
* BIT3: 清空中断标志
* BIT2: DMA传输使能
* BIT1: 自动刷新开始
* BIT0: 自动刷新停止
*/
/* LCD接口状态寄存器 */
#define LCMIFSTA (*(unsigned char volatile xdata *)0xfe53)
/* 功能:反映LCD接口当前的工作状态
* 位定义:
* BIT7: 接口忙标志 (1=忙, 0=空闲)
* BIT6: 传输完成标志
* BIT5: 数据就绪标志
* BIT4: FIFO溢出标志
* BIT3: FIFO欠载标志
* BIT2: 帧错误标志
* BIT1: 行错误标志
* BIT0: 奇偶校验错误标志
*/
/* LCD接口数据寄存器低字节 */
#define LCMIFDATL (*(unsigned char volatile xdata *)0xfe54)
/* 功能:存储发送到LCD的数据的低8位
* 说明:
* - 当数据宽度为8位时,直接存储数据
* - 当数据宽度为16位时,存储低字节数据
* - 写操作:向LCD发送数据
* - 读操作:从LCD接收数据
*/
/* LCD接口数据寄存器高字节 */
#define LCMIFDATH (*(unsigned char volatile xdata *)0xfe55)
/* 功能:存储发送到LCD的数据的高8位
* 说明:
* - 仅在16位数据宽度模式下有效
* - 写操作:向LCD发送数据
* - 读操作:从LCD接收数据
*/
/* 使用说明:
* 1. 使用LCD接口前需先配置LCMIFCFG和LCMIFCFG2寄存器
* 2. 使能接口后通过LCMIFCR控制数据传输
* 3. 读取LCMIFSTA可获取接口当前状态
* 4. 数据传输通过LCMIFDATL和LCMIFDATH寄存器进行
* 5. 不同LCD控制器可能需要不同的时序和通信协议配置
*/
/* RTC控制寄存器 */
#define RTCCR (*(unsigned char volatile xdata *)0xfe60)
/* 功能:控制RTC的工作模式和时钟源
* 位定义:
* BIT7: RTC使能位 (1=使能RTC, 0=禁用)
* BIT6: 闹钟中断使能
* BIT5: 秒中断使能
* BIT4: 亚秒中断使能
* BIT3: 时钟源选择 (0=内部32KHz RC, 1=外部32.768KHz晶振)
* BIT2: 夏令时使能
* BIT1: RTC复位
* BIT0: 保留
*/
/* RTC配置寄存器 */
#define RTCCFG (*(unsigned char volatile xdata *)0xfe61)
/* 功能:配置RTC的工作参数
* 位定义:
* BIT7-BIT6: 时间格式选择 (00=24小时制, 01=12小时制AM, 10=12小时制PM)
* BIT5: 日期格式选择 (0=公历, 1=农历)
* BIT4: 闹钟匹配模式 (0=精确匹配, 1=忽略秒匹配)
* BIT3-BIT0: 亚秒分频系数 (0-15, 对应1/128s ~ 1/8192s)
*/
/* RTC中断使能寄存器 */
#define RTCIEN (*(unsigned char volatile xdata *)0xfe62)
/* 功能:使能RTC相关中断
* 位定义:
* BIT7: 保留
* BIT6: 闹钟中断使能
* BIT5: 秒中断使能
* BIT4: 亚秒中断使能
* BIT3-BIT0: 保留
*/
/* RTC中断标志寄存器 */
#define RTCIF (*(unsigned char volatile xdata *)0xfe63)
/* 功能:记录RTC中断事件
* 位定义:
* BIT7: 保留
* BIT6: 闹钟中断标志 (置1时触发中断,需软件清零)
* BIT5: 秒中断标志
* BIT4: 亚秒中断标志
* BIT3-BIT0: 保留
*/
/* 闹钟小时寄存器 (BCD码) */
#define ALAHOUR (*(unsigned char volatile xdata *)0xfe64)
/* 功能:设置闹钟小时值 (00-23或01-12,取决于RTCCFG设置) */
/* 闹钟分钟寄存器 (BCD码) */
#define ALAMIN (*(unsigned char volatile xdata *)0xfe65)
/* 功能:设置闹钟分钟值 (00-59) */
/* 闹钟秒寄存器 (BCD码) */
#define ALASEC (*(unsigned char volatile xdata *)0xfe66)
/* 功能:设置闹钟秒值 (00-59) */
/* 闹钟亚秒寄存器 (BCD码) */
#define ALASSEC (*(unsigned char volatile xdata *)0xfe67)
/* 功能:设置闹钟亚秒值 (00-99,取决于亚秒分频系数) */
/* 初始化年份寄存器 (BCD码,2000-2099对应00-99) */
#d
相关文章:

STC8H系列单片机STC8H_H头文件功能注释
#ifndef __STC8H_H__ // 条件编译:如果未定义__STC8H_H__宏 #define __STC8H_H__ // 则定义该宏,防止头文件被重复包含 / //包含本头文件后,不用另外再包含"REG51.H" // 提示:本头文件已包含基本寄存器定义 sfr P0 = …...

Python类的力量:第五篇:魔法方法与协议——让类拥有Python的“超能力”
文章目录 前言:从“普通对象”到“Python原生公民”的进化之路 一、魔法方法:赋予对象“超能力”的基因1. 构造与析构:对象生命周期的“魔法开关”2. 字符串表示:对象的“自我介绍”3. 运算符重载:让对象支持“数学魔法…...
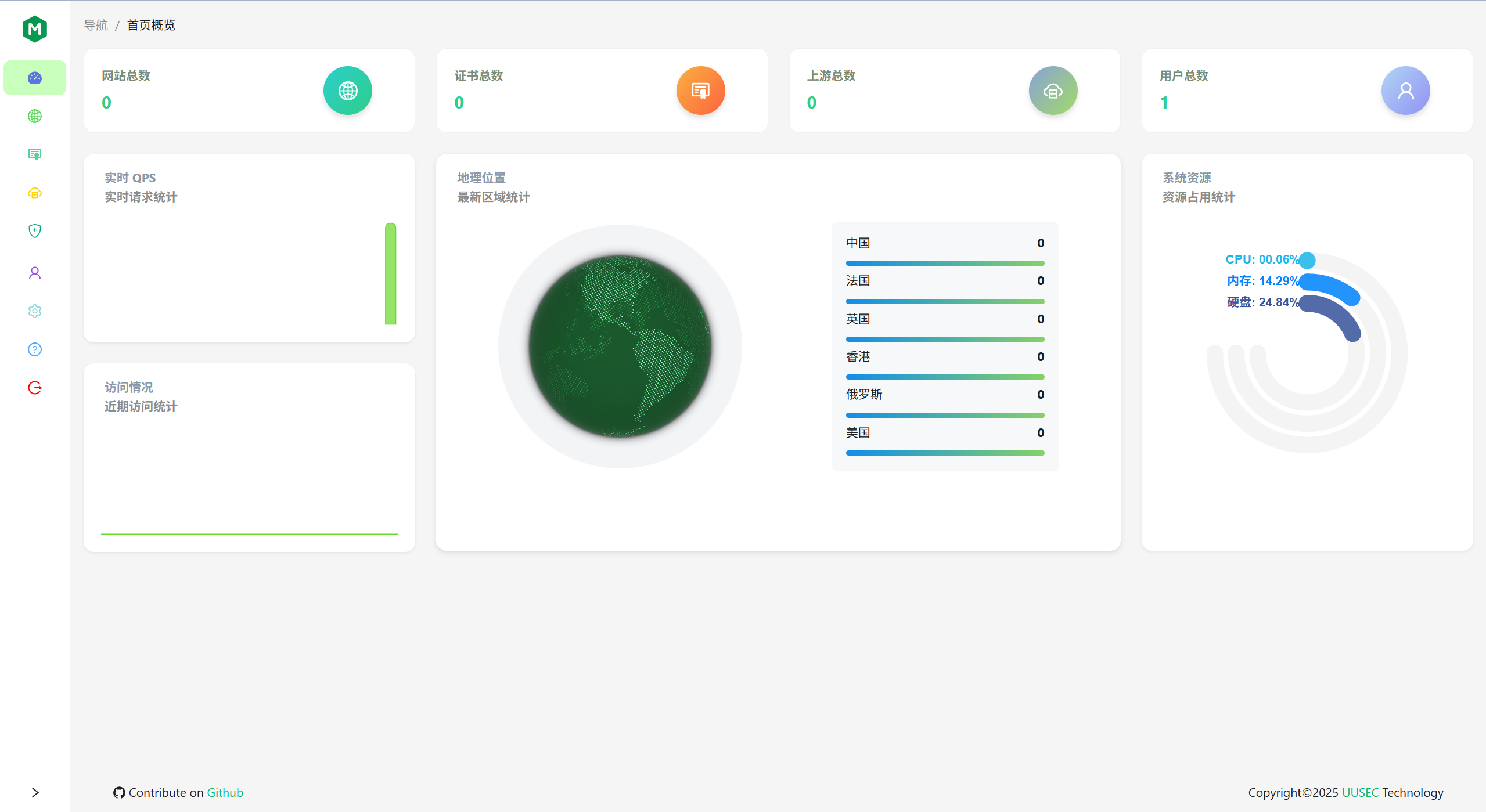
OpenResty Manager 介绍与部署(Docker部署)
概述 OpenResty-Manager 是一个基于 OpenResty 构建的开源 Web 管理平台。OpenResty 是一个高性能的 Web 平台,集成了 Nginx 和 LuaJIT,支持强大的脚本功能。OpenResty-Manager 由 Safe3 开发,提供了一个用户友好的界面,用于管理…...

深入解析HTTP协议演进:从1.0到3.0的全面对比
HTTP协议作为互联网的基础协议,经历了多个版本的迭代演进。本文将详细解析HTTP 1.0、HTTP 1.1、HTTP/2和HTTP/3的核心特性与区别,帮助开发者深入理解网络协议的发展脉络。 一、HTTP 1.0:互联网的奠基者 核心特点: 短连接模式&am…...
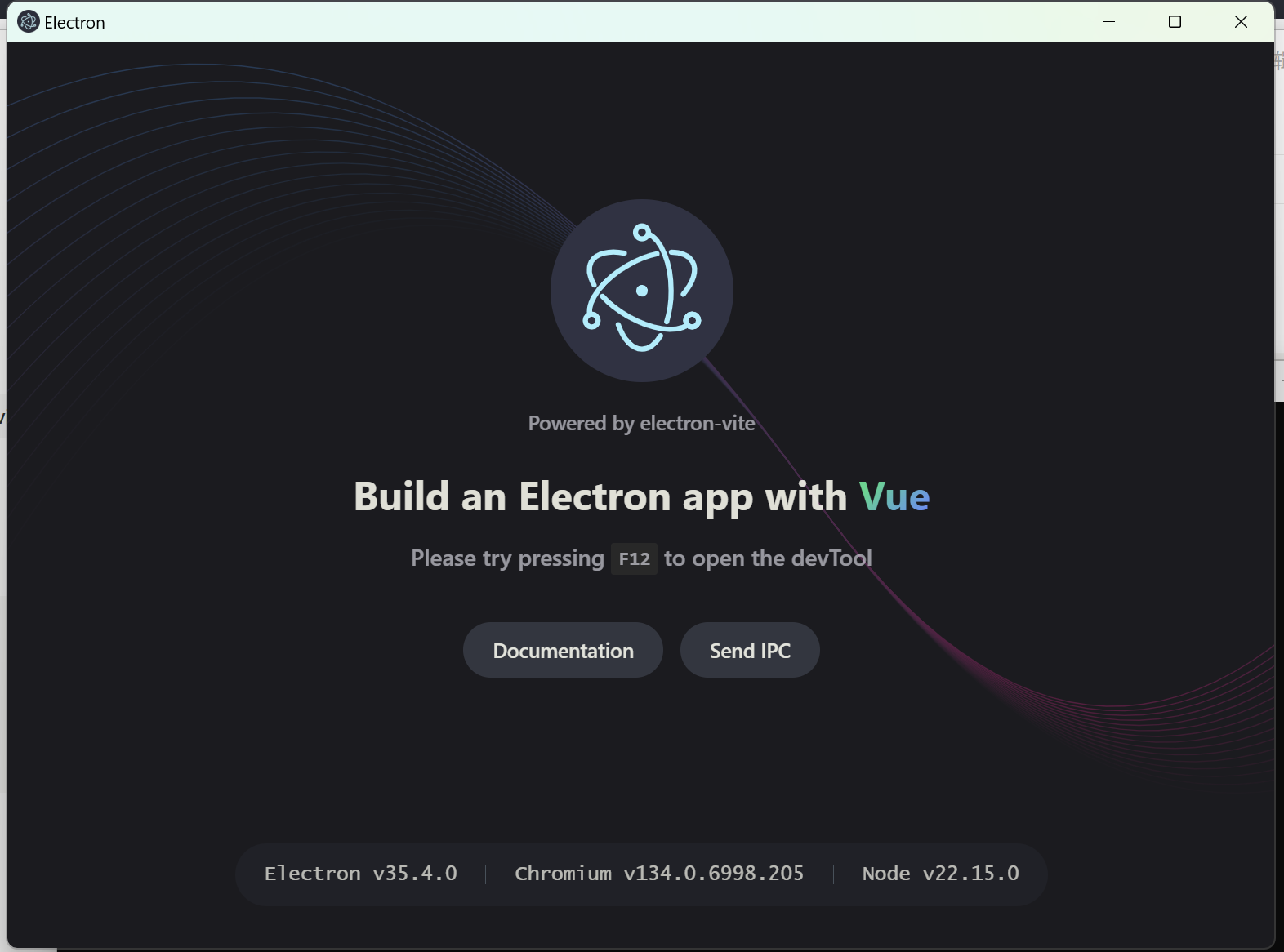
快速搭建一个electron-vite项目
1. 初始化项目 在命令行中运行以下命令 npm create quick-start/electronlatest也可以通过附加命令行选项直接指定项目名称和你想要使用的模版。例如,要构建一个 Electron Vue 项目,运行: # npm 7,需要添加额外的 --: npm cre…...

【Android】Android 实现一个依赖注入的注解
Android 实现一个依赖注入的注解 🎯 目标功能 自定义注解 Inject创建一个 Injector 类,用来扫描并注入对象支持 Activity 或其他类中的字段注入 🧩 步骤一:定义注解 import java.lang.annotation.ElementType; import java.lan…...
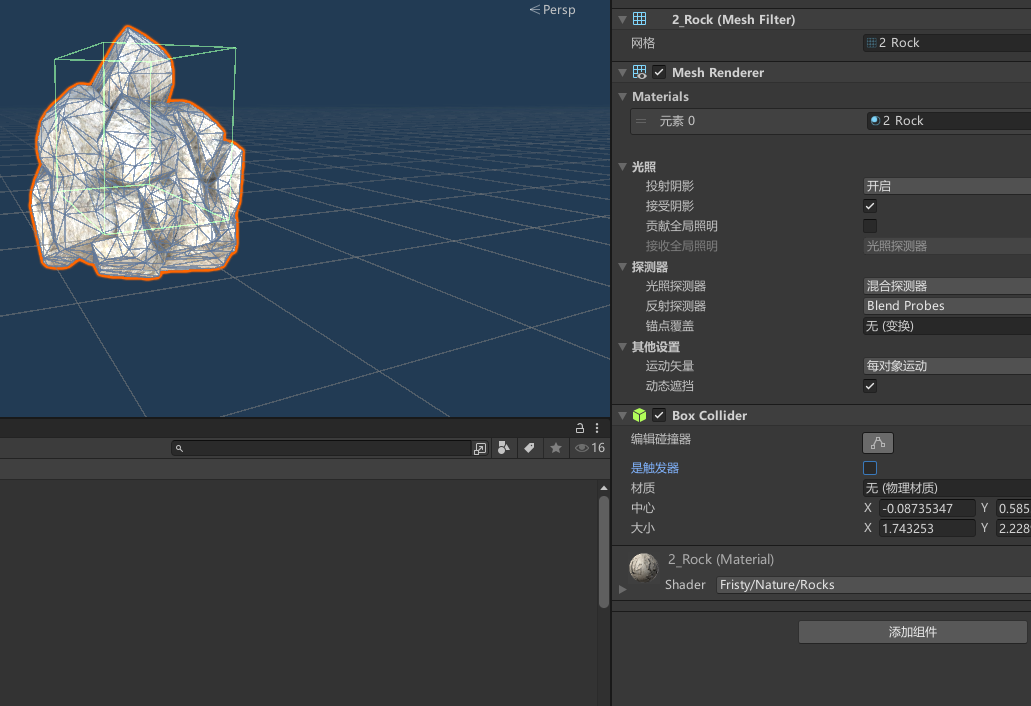
unity terrain 在生成草,树,石头等地形障碍的时候,无法触发碰撞导致人物穿过模型
1.terrain地形的草,石头之类要选择模型预制体 2.在人物身上挂碰撞器和刚体,或者单挂一个character controller组件也行 3.在预制体上挂碰撞盒就好了,挂载meshcollider会导致碰撞无效...

使用gitbook 工具编写接口文档或博客
步骤一:在项目目录中初始化一个 GitBook 项目 mkdir mybook && cd mybook git init npm init -y步骤二:添加书籍结构(如 book.json, README.md) echo "# 我的书" > README.md echo "{}" > bo…...
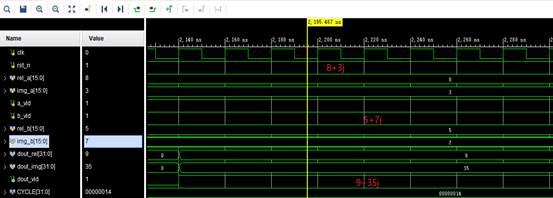
75.xilinx复数乘法器IP核调试
(83*j)*(57j) 935j 正确的是 1971j 分析出现的原因:(abj)* (cdj) (ac-bd)j(adbc) 其中a,b,c,d都是16bit的有符号数,乘积的结果为保证不溢出需要32bit存储,最终的复数乘法结果是两个32b…...

软件工程之软件产品的环境
比较正规的做法是分下面的三个 1.开发环境(Development Environment): 用途:这是软件开发人员编写和测试代码的地方。在开发环境中,开发者可以自由地试验、调试代码,以及进行初步的功能实现和测试。 特点&…...

8.ADC
目录 ADC 模拟信号和数字信号的区别和区别 信号的区别 如何采集信号 常见的接口 数字接口 模拟接口 ADC 实际应用 ADC 转换器的定义 ADC 相关的名词 ADC 采集的原理 ADC 的参考电压 相关的计算 如何实现 ADC STM32 内的 ADC 转换器讲解 STM32 的 ADC 简介 AD…...
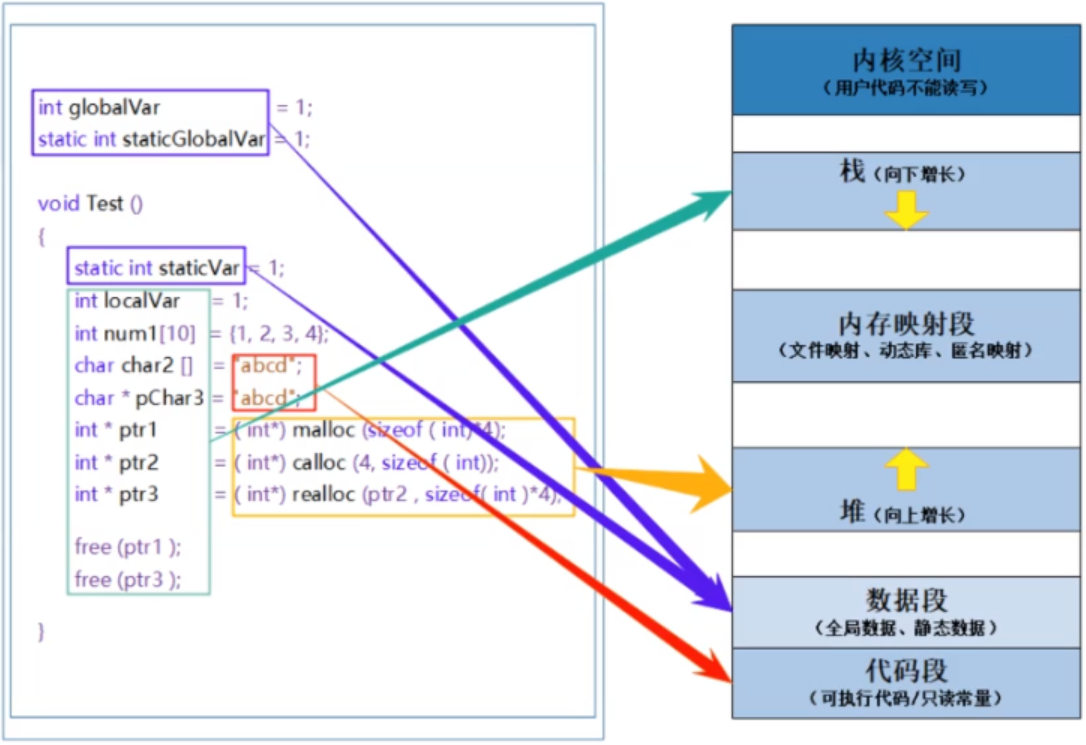
c/c++中程序内存区域的划分
c/c程序内存分配的几个区域: 1.栈区:在执行函数时,函数内局部变量的存储单元都可以在栈上创建,函数执行结束时这些存储单元自动被释放,栈内存分配运算内置于处理器的指令集中,效率很高但是分配的内存容量有…...
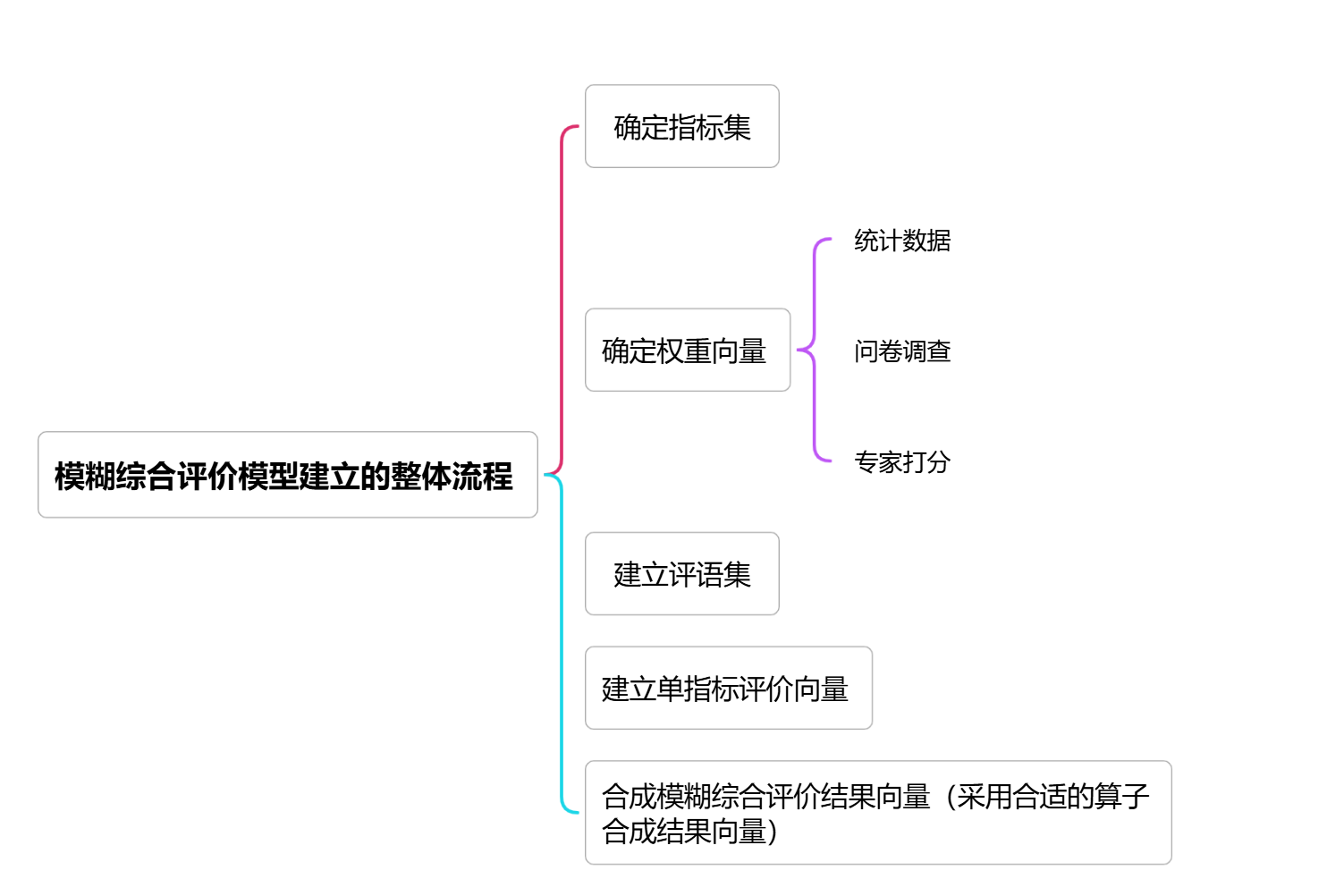
模糊综合评价模型建立
模糊综合评价模型建立 一、整体流程 二、代码实现(含大量注释) #程序文件ex14_4.py import numpy as npa np.loadtxt(data14_4.txt) # 使用定义匿名函数的形式来定义各个评价指标的隶属函数 f1 lambda x: x/8800 f2 lambda x: 1-x/8000 f3 lambda x: (x<5.5)(8-x)/(8-…...
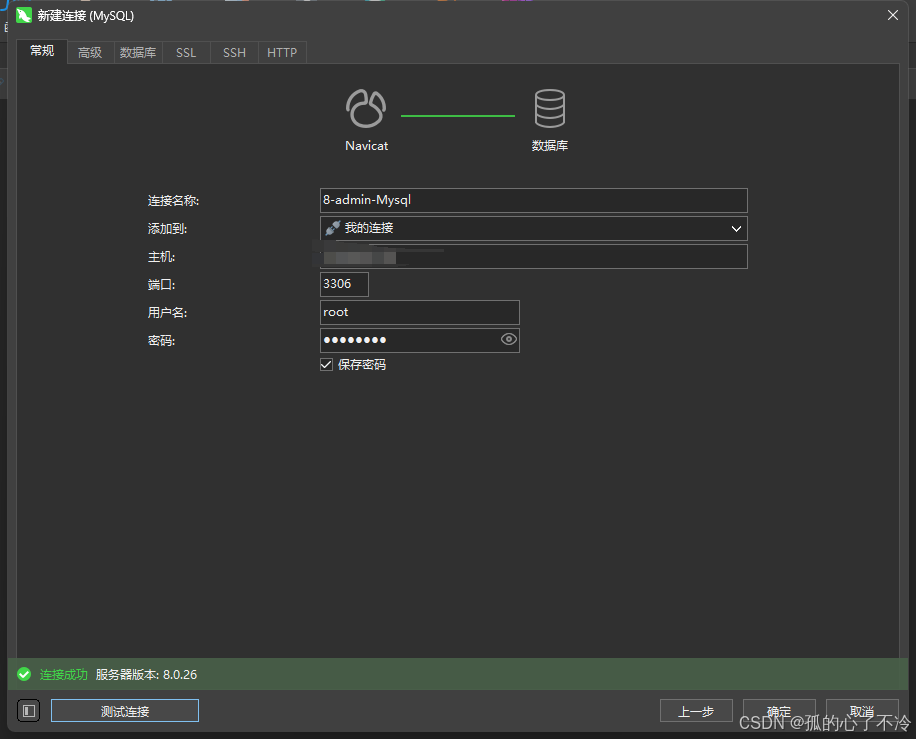
【Linux】Linux安装mysql
该教程是使用的 CentOS 8.2 安装 mysql。 1.删除原有mysql rpm -qa|grep mariadb 如果存在在mariadb,卸载命令如下: #rpm -e --nodeps是强制卸载指令 后面是查出的依赖名称rpm -e --nodeps mariadb-libs-5.5.64-1.el7.x86_64全部卸载完输入以下指令&am…...
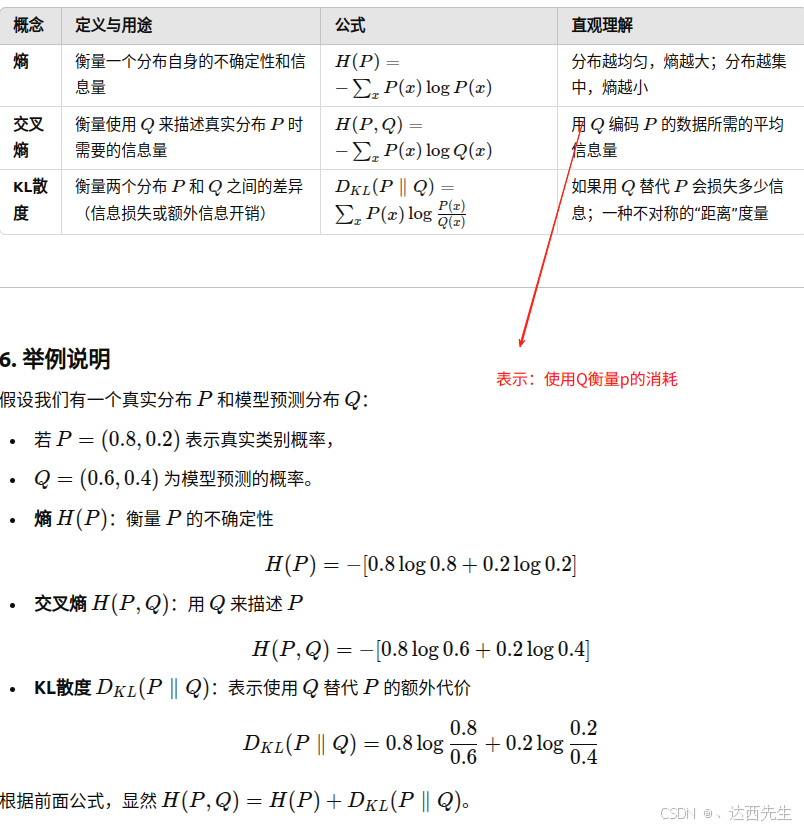
模仿学习笔记
模仿学习总共分两类: 行为克隆:BC,Dagger逆强化学习:又分为 2.1基于最大边际逆强化学习 (无法主要歧义问题):学徒学习 2.2 基于最大熵逆强化学习 (主要解决歧义问题):GAIL 学徒学习 基于最大熵…...
一文讲透 Vue3 + Three.js 材质属性之皮革篇【扫盲篇】
文章目录 前言一、Three.js材质系统基础1.1 为什么选择PBR材质?1.2 关键参数解析 二、不同类型皮革的材质配置2.1 牛皮材质实现2.2 羊皮材质实现2.3 仿皮材质实现 三、高级贴图技术3.1 贴图制作流程3.2 组合贴图实战 四、性能优化策略4.1 贴图压缩技术4.2 材质共享4…...
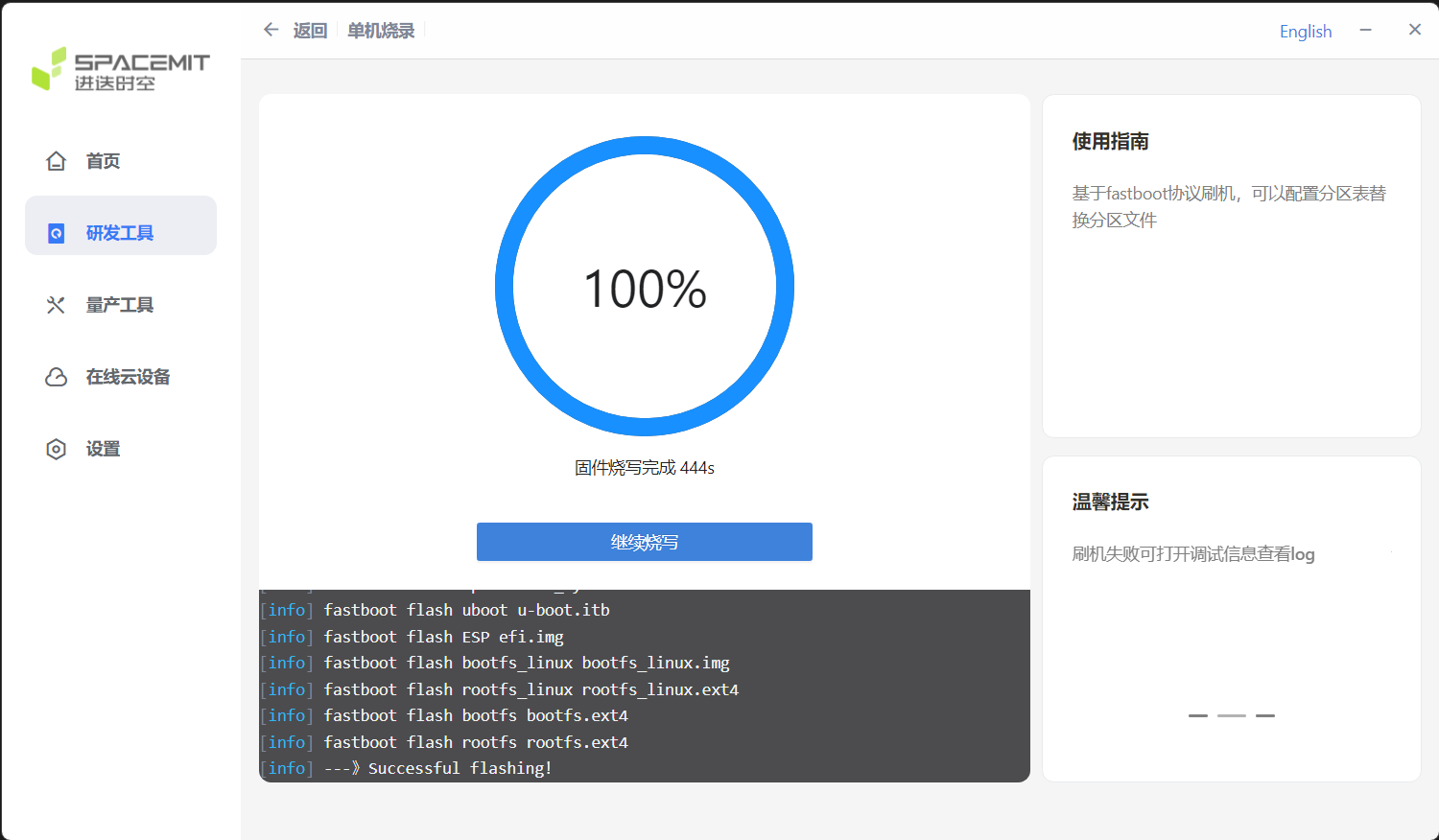
MUSE Pi Pro 使用TiTanTools烧录镜像
视频讲解: MUSE Pi Pro 使用TiTanTools烧录镜像 下载windows下的烧录工具 https://cloud.spacemit.com/prod-api/release/download/tools?tokentitantools_for_windows_X86_X64 下载镜像文件,zip后缀的即可 打开软件默认界面 按住FDL键,同时…...

奇变偶不变,符号看象限
三角函数诱导公式口诀详解:奇变偶不变,符号看象限 口诀解析 1. 口诀含义 奇变偶不变: 奇/偶:指角度加减的是π/2(90)的奇数倍还是偶数倍 奇数倍(如π/2, 3π/2)→ 函数名改变&…...
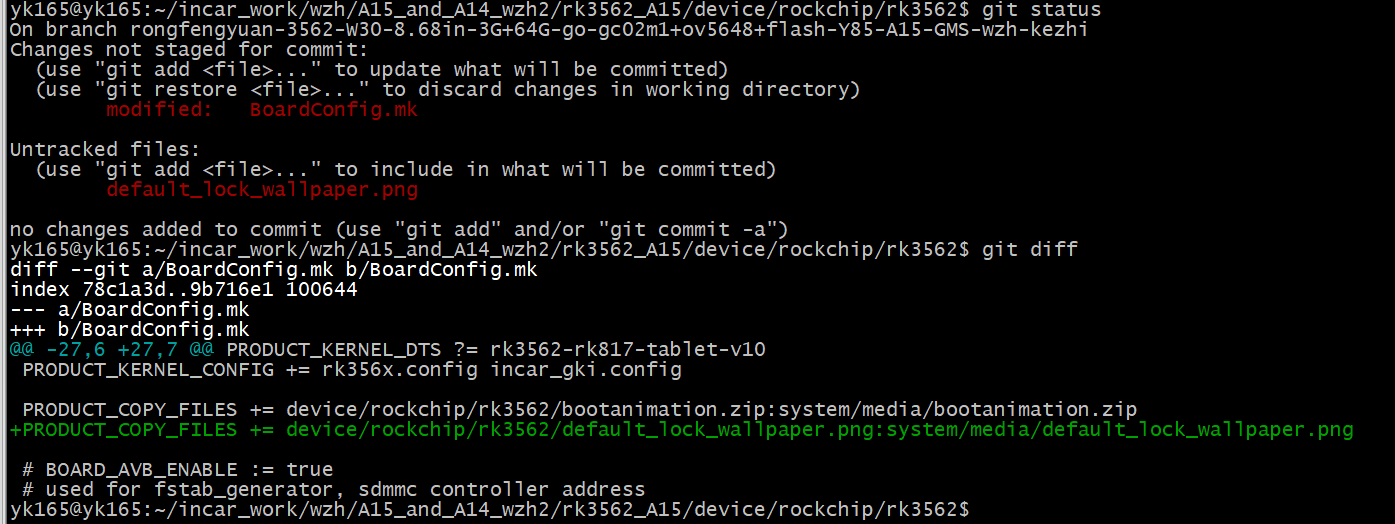
安卓A15系统实现修改锁屏界面默认壁纸功能
最近遇到一个A15系统项目,客户要求修改锁屏界面的默认壁纸,客户提供了一张壁纸图片,但是从A15系统的源代码查看时才知道谷歌已经去掉了相关的代码,已经不支持了,A13和A14系统好像是支持的,A15系统的Wallpap…...

IT系统的基础设施:流量治理、服务治理、资源治理,还有数据治理。
文章目录 引言I IT系统的基础设施流量治理、服务治理、资源治理,还有数据治理。开发语言的选择数据治理(监控系统):整体运维的数据其他II 基础知识的重要性第一,知道原理第二,当遇到一些比较难解的问题时,基础知识就会派上用场。例子III 大公司和小公司的权衡对比大公司…...

使用 TypeScript + dhtmlx-gantt 在 Next.js 中实现
1. 安装依赖(确保已安装) npm install dhtmlx-gantt2. 创建 pages/gantt.tsx use clientimport { useRef, useEffect } from react import { gantt } from dhtmlx-gantt import dhtmlx-gantt/codebase/dhtmlxgantt.cssinterface Task {id: number | st…...

解锁健康生活:现代养生实用方案
早上被闹钟惊醒后匆忙灌下咖啡,中午用外卖应付一餐,深夜刷着手机迟迟不肯入睡 —— 这样的生活模式,正在不知不觉侵蚀我们的健康。科学养生并非遥不可及的目标,只需从生活细节入手,就能逐步改善身体状态。 饮食管理…...
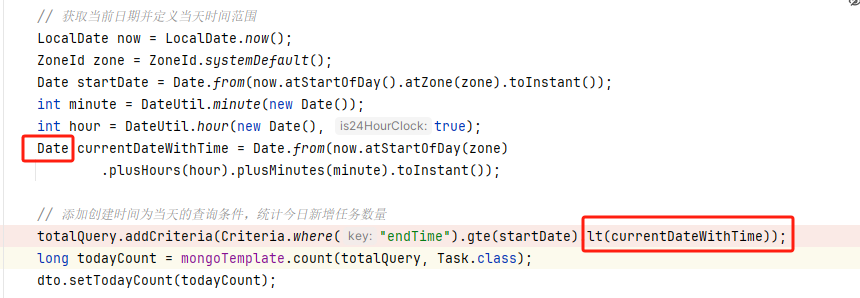
mongodb处理时区转换问题
1. 程序查询直接使用(java)Date即可, 因为直接支持 2. 若方便查看日期需要进行格式和时区转换 db.task.aggregate([{ $match: {userId: 113633}},{ $project: {userId: 1,endTime: 1,formattedDate: {$dateToString: {format: "%Y-%m-%d %H:%M:%S&…...

专项智能练习(定义判断)_DA_01
1. 单选题 热传导是介质内无宏观运动时的传热现象,其在固体、液体和气体中均可发生。但严格而言,只有在固体中才是纯粹的热传导,在流体(泛指液体和气体)中又是另外一种情况,流体即使处于静止状态࿰…...

linux dbus
Linux D-Bus(Desktop Bus)是一种进程间通信(IPC)机制,主要用于Linux桌面环境和系统服务之间的消息传递。它允许不同的应用程序或系统组件以高效、安全的方式相互通信,是现代Linux桌面(如GNOME、KDE)的核心基础设施之一。 1. D-Bus 的核心概念 消息总线(Message Bus):…...

基于“物理—事理—人理”的多源异构大数据融合探究
在大数据时代,海量数据作为各领域的重要资源,其更多的价值有待被挖掘,更大的潜能有待释放。此外,移动通信设备的深度普及、互联网的全面覆盖,以及5G、人工智能(AI)等的高速发展,不断推动大数据自身的更新和前进。从企业产生的内部数据在生产经营等环节中蕴含着重要价值…...
)
[学习]RTKLib详解:tle.c(系列终章)
本文是 RTKLlib详解 系列文章的一篇,目前该系列文章还在持续总结写作中,以发表的如下,有兴趣的可以翻阅。 [学习] RTKlib详解:功能、工具与源码结构解析 [学习]RTKLib详解:pntpos.c与postpos.c [学习]RTKLib详解&…...
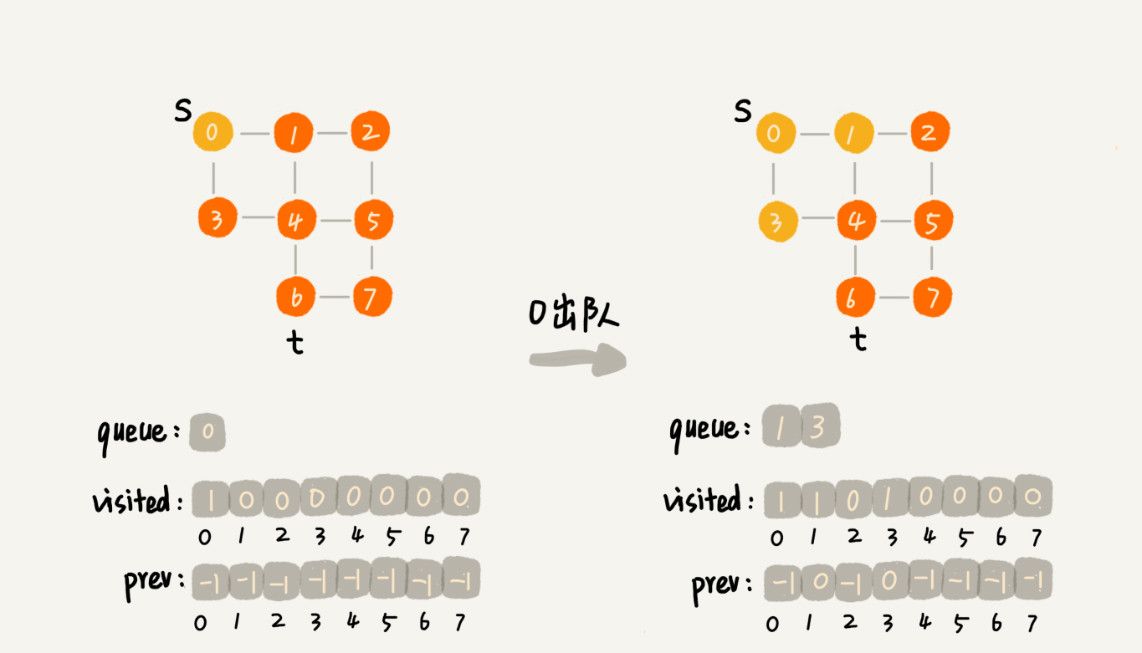
广度和深度优先搜索(BFS和DFS)
1. 广度和深度优先搜索(BFS和DFS) 1.1. Python实现BFS和DFS from collections import dequeclass Graph:"""无向图类,支持添加边,并实现了 BFS(广度优先搜索)和 DFS(深度优先搜…...
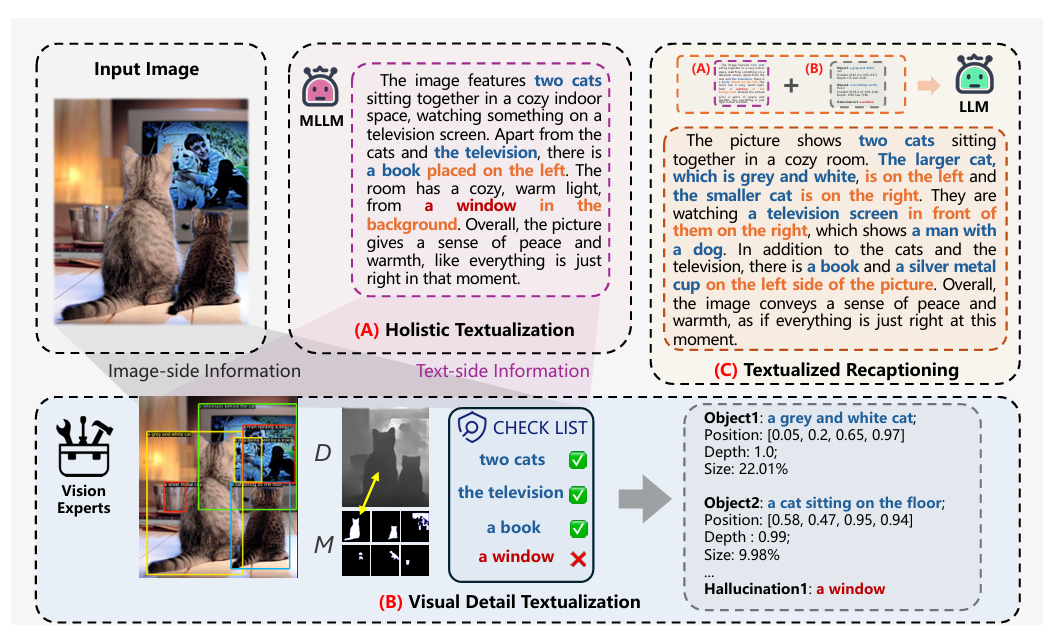
【计算机视觉】OpenCV实战项目:Text-Extraction-Table-Image:基于OpenCV与OCR的表格图像文本提取系统深度解析
Text-Extraction-Table-Image:基于OpenCV与OCR的表格图像文本提取系统深度解析 1. 项目概述2. 技术原理与算法设计2.1 图像预处理流水线2.2 表格结构检测算法2.3 OCR优化策略 3. 实战部署指南3.1 环境配置3.2 核心代码解析3.3 执行流程示例 4. 常见问题与解决方案4.…...
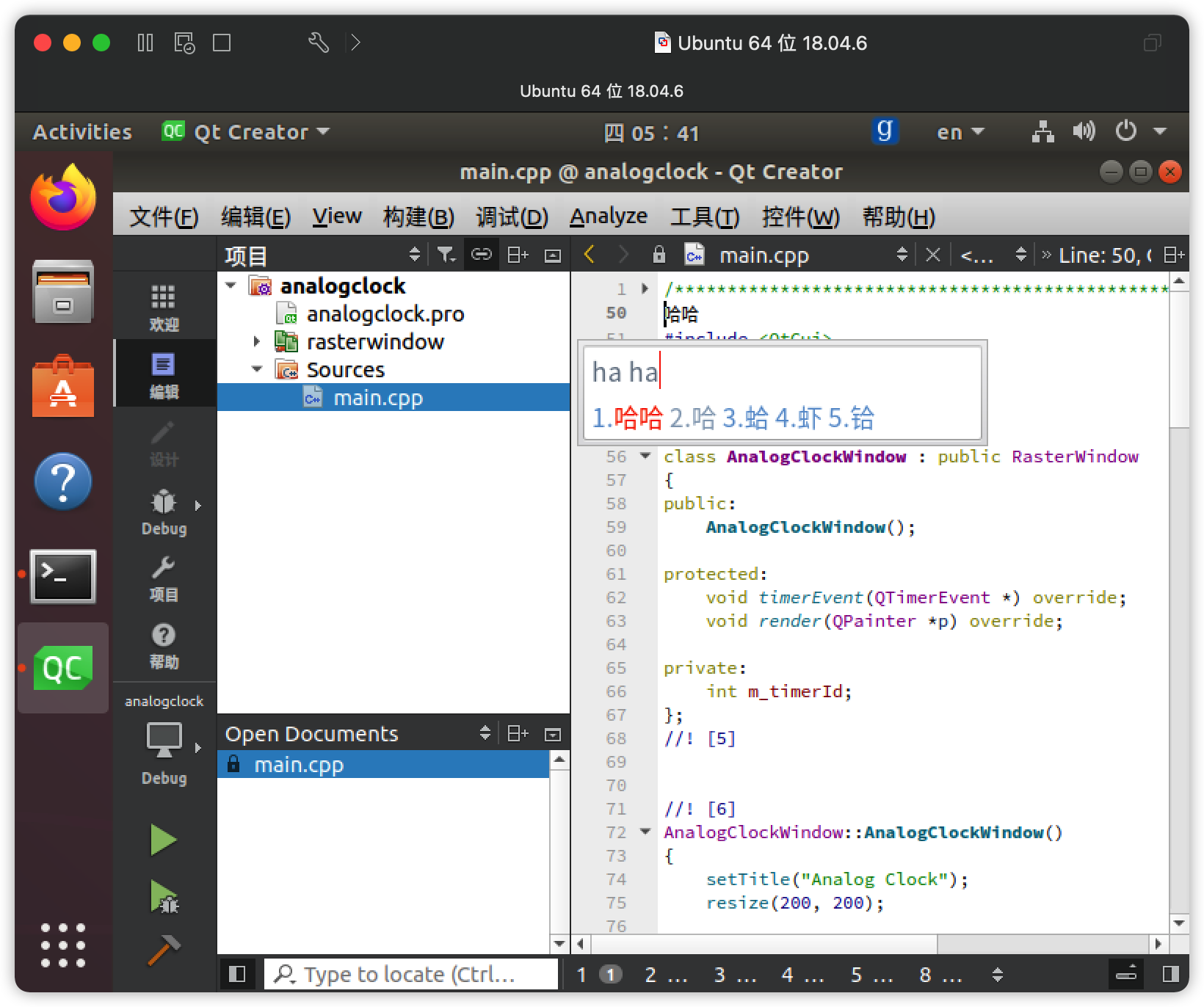
嵌入式Linux Qt开发:1、搭建基于ubuntu18.04的Qt开发环境及测试(解决Qt creator输入法问题)
一、前言 基本在我职业生涯开始时就已经在使用Qt进行一些上位机开发了,后续也有一些嵌入式设备用Qt开发,但是一直没有完整和系列的总结,包括C也是,这里慢慢补上一些总结,防止很多经验总结和学习过程又遗忘了ÿ…...