OpenCV中的光流估计方法详解
文章目录
- 一、引言
- 二、核心算法原理
- 1. 光流法基本概念
- 2. 算法实现步骤
- 三、代码实现详解
- 1. 初始化设置
- 2. 特征点检测
- 3. 光流计算与轨迹绘制
- 四、实际应用效果
- 五、优化方向
- 六、结语
一、引言
在计算机视觉领域,运动目标跟踪是一个重要的研究方向,广泛应用于视频监控、自动驾驶、人机交互等场景。本文将介绍如何使用OpenCV中的Lucas-Kanade光流法实现简单的运动目标轨迹跟踪,并详细解析代码实现。
二、核心算法原理
1. 光流法基本概念
光流(Optical Flow)是图像中物体运动造成的视觉"流动",描述了像素点在连续帧之间的运动模式。Lucas-Kanade算法是一种经典的稀疏光流算法,它基于以下三个假设:
- 亮度恒定(同一特征点的亮度不随时间变化)
- 时间持续性(运动随时间缓慢变化)
- 空间一致性(邻近点有相似运动)
2. 算法实现步骤
- 特征点检测:使用Shi-Tomasi角点检测
- 光流计算:金字塔Lucas-Kanade方法
- 轨迹绘制:连接连续帧中的特征点
三、代码实现详解
1. 初始化设置
import numpy as np
import cv2# 视频读取和参数初始化
cap = cv2.VideoCapture('test.avi')
color = np.random.randint(0,255,(100,3)) # 随机颜色用于轨迹绘制
2. 特征点检测
# 读取第一帧并转换为灰度图
ret, old_frame = cap.read()
old_gray = cv2.cvtColor(old_frame, cv2.COLOR_BGR2GRAY)# Shi-Tomasi角点检测参数
feature_params = dict(maxCorners=100, qualityLevel=0.3, minDistance=7)
p0 = cv2.goodFeaturesToTrack(old_gray, mask=None, **feature_params)
- 使用角点检测方法找到特征点
goodFeaturesToTrack(image,maxCorners,qualityLevel,minDistance,corners=None,mask=None,blockSize=None)
- image:输入单通道图像。用灰度图
- maxCorners:设定最大的角点个数,是最有可能的角点数,如果这个参数不大于0,那么表示没有角点数的限制。
- qualityLevel:图像角点的最小可接受参数,质量测量值乘以这个参数就是最小特征值,小于这个数的会被抛弃。
- minDistance:角点之间最小的欧氏距离
- mask:检测区域,如果图像不是空的,它指定检测角的区域。
- 返回所有角点坐标位置:corners
3. 光流计算与轨迹绘制
# LK光流参数
lk_params = dict(winSize=(15,15), maxLevel=2)while True:ret, frame = cap.read()if not ret:breakframe_gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)# 计算光流p1, st, err = cv2.calcOpticalFlowPyrLK(old_gray, frame_gray, p0, None, **lk_params)# 筛选成功跟踪的点good_new = p1[st==1]good_old = p0[st==1]# 绘制轨迹for i, (new, old) in enumerate(zip(good_new, good_old)):a, b = new.ravel().astype(int)c, d = old.ravel().astype(int)mask = cv2.line(mask, (a,b), (c,d), color[i].tolist(), 2)img = cv2.add(frame, mask)cv2.imshow('frame', img)# 更新前一帧数据old_gray = frame_gray.copy()p0 = good_new.reshape(-1,1,2)
计算光流,获取新的特征点位置和状态
calcOpticalFlowPyrLK(prevImg,nextImg,prevPts,nextPts,status=None,err=None,winSize=None,maxLevel=None,criteria=None,flags=None,minEigThreshold=None)
- prevImg:前一帧图像
- nextImg:当前帧图像
- prevPts:前一帧图像中特征点坐标位置
- nextPts:当前帧图像中特征点坐标,可以为None
- winSize:搜索窗口的大小
- maxLevel:金字塔层数
- criteria:停止迭代的准则
- 返回值:
- nextPts:在当前帧中估计出的特征点坐标
- status:一个与prevPts一样大小的状态向量,用于表示特征点是否被成功跟踪到。
- err:一个与prevPts一样大小的误差向量,用于表示估计误差
四、实际应用效果
运行程序后,可以看到视频中检测到的特征点及其运动轨迹。不同颜色的线条代表不同特征点的运动路径,直观展示了物体的运动情况。
显示效果如下:左边是一段有很多人在走动的视频,右边就是根据人物运动的轨迹画出的轨迹图。

五、优化方向
- 特征点选择优化:可以尝试其他特征检测算法如SIFT、SURF等
- 运动模型改进:引入卡尔曼滤波等预测算法提高跟踪稳定性
- 遮挡处理:添加特征点重新检测机制应对遮挡情况
- 性能优化:使用多线程处理提高实时性
六、结语
本文实现了一个基于OpenCV的简单运动目标跟踪系统,展示了光流法的基本应用。虽然实现相对简单,但包含了目标跟踪的核心思想。读者可以在此基础上进行扩展,开发更复杂的跟踪系统。
我们定能不负所托 不负所望!!!🚀🚀🚀
相关文章:
OpenCV中的光流估计方法详解
文章目录 一、引言二、核心算法原理1. 光流法基本概念2. 算法实现步骤 三、代码实现详解1. 初始化设置2. 特征点检测3. 光流计算与轨迹绘制 四、实际应用效果五、优化方向六、结语 一、引言 在计算机视觉领域,运动目标跟踪是一个重要的研究方向,广泛应用…...

OpenCL C++ 常见属性与函数
核心对象与属性 对象/属性描述示例cl::Platform表示OpenCL平台cl::Platform::get(&platforms)cl::Device表示计算设备cl::Device::getDefault()cl::Context管理设备、内存和命令队列的上下文cl::Context(contextDevices)cl::CommandQueue命令队列,用于提交命令cl::Command…...

Android核心系统服务:AMS、WMS、PMS 与 system_server 进程解析
1. 引言 在 Android 系统中,ActivityManagerService (AMS)、WindowManagerService (WMS) 和 PackageManagerService (PMS) 是三个最核心的系统服务,它们分别管理着应用的生命周期、窗口显示和应用包管理。 但你是否知道,这些服务并不是独立…...

18.自动化生成知识图谱的多维度质量评估方法论
文章目录 一、结构维度评估1.1 拓扑结构评估1.1.1 基础图论指标1.1.2 层级结构指标 1.2 逻辑一致性评估1.2.1 形式逻辑验证1.2.2 约束满足度 二、语义维度评估2.1 语义一致性评估2.1.1 标签语义分析2.1.2 关系语义评估 2.2 语义表示质量2.2.1 嵌入质量2.2.2 上下文语义评估 三、…...

【行为型之命令模式】游戏开发实战——Unity可撤销系统与高级输入管理的架构秘钥
文章目录 ⌨️ 命令模式(Command Pattern)深度解析一、模式本质与核心价值二、经典UML结构三、Unity实战代码(可撤销的建造系统)1. 定义命令接口与接收者2. 实现具体命令3. 命令管理器(Invoker)4. 客户端使…...
)
图论模板(部分)
图论模板(部分) maincpp #include <iostream> #include <climits> #include <limits>typedef unsigned long long ull; typedef long long ll; typedef long double ld; typedef std::pair<int, int> PII;#define rep(i, n) f…...
(技巧)(暴力解法;哈希集合;二分查找))
LeetCode 热题 100_寻找重复数(100_287_中等_C++)(技巧)(暴力解法;哈希集合;二分查找)
LeetCode 热题 100_寻找重复数(100_287_中等_C) 题目描述:输入输出样例:题解:解题思路:思路一(暴力解法):思路二(哈希集合):思路三&am…...

NBA足球赛事直播源码体育直播M33模板赛事源码
源码名称:体育直播赛事扁平自适应M33直播模板源码 开发环境:帝国cms7.5 空间支持:phpmysql 带软件采集,可以挂着自动采集发布,无需人工操作! 演示地址:NBA足球赛事直播源码体育直播M33模板赛事…...
)
【QT 项目部署指南】使用 Inno Setup 打包 QT 程序为安装包(超详细图文教程)
一、为什么需要打包成安装包? 在完成 QT 项目开发后,直接发布可执行文件(.exe)和依赖的 DLL 文件虽然可行,但存在以下问题: 用户体验差:用户需手动管理文件路径,容易因文件缺失导致…...

电子电器架构 --- 整车造车阶段四个重要节点
我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。 老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师: 钝感力的“钝”,不是木讷、迟钝,而是直面困境的韧劲和耐力,是面对外界噪音的通透淡然。 生活中有两种人,一种人格外在意别人的眼光;另一种人无论…...

黑马点评-用户登录
文章目录 用户登录发送短信验证码注册/登录校验登录 用户登录 发送短信验证码 public Result sendCode(String phone, HttpSession session) {// 1.校验手机号if (RegexUtils.isPhoneInvalid(phone)) {// 2.如果不符合,返回错误信息return Result.fail("手机…...

ecmascript 第6版特性 ECMA-262 ES6
https://blog.csdn.net/zlpzlpzyd/article/details/146125018 在之前写的文章基础上,ES6在export和import的基础外,还有如下特性 特性说明let/const块级作用域变量声明>箭头函数Promise异步编程...
十二、Hive 函数
作者:IvanCodes 日期:2025年5月1日 专栏:Hive教程 在数据处理的广阔天地中,我们常常需要对数据进行转换、计算、清洗或提取特定信息。Hive 提供了强大的内置运算符和丰富的内置函数库,它们就像魔法师手中的魔法棒&…...
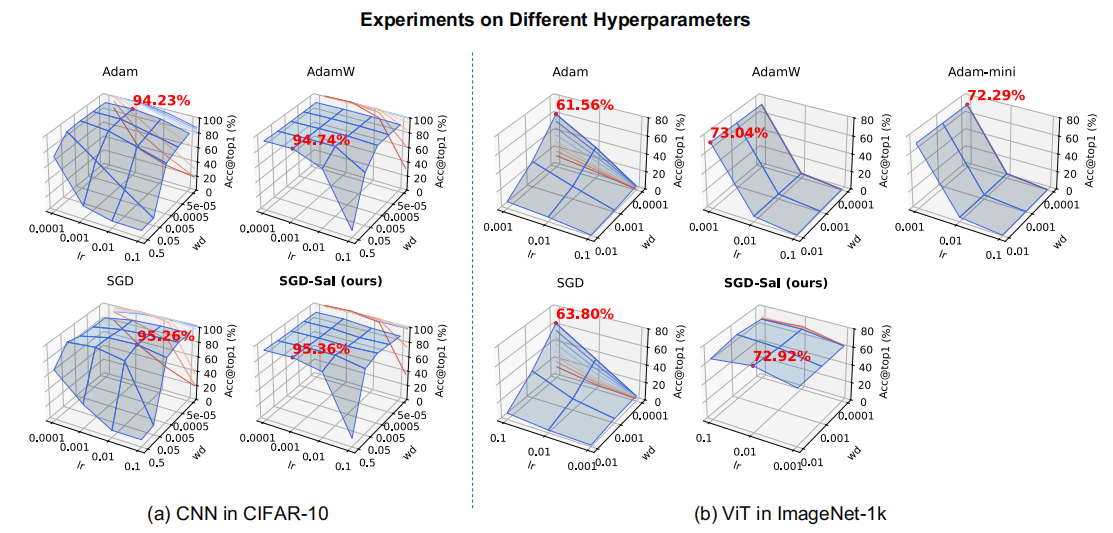
No More Adam: 新型优化器SGD_SaI
一.核心思想和创新点 2024年12月提出的SGD-SaI算法(Stochastic Gradient Descent with Scaling at Initialization)本质上是一种在训练初始阶段对不同参数块(parameter block)基于**梯度信噪比(g-SNR, Gradient Signa…...

数据结构【AVL树】
AVL树 1.AVL树1.AVL的概念2.平衡因子 2.AVl树的实现2.1AVL树的结构2.2AVL树的插入2.3 旋转2.3.1 旋转的原则 1.AVL树 1.AVL的概念 AVL树可以是一个空树。 它的左右子树都是AVL树,且左右子树的高度差的绝对值不超过1。AVL树是一颗高度平衡搜索二叉树,通…...

C#将1GB大图裁剪为8张图片
C#处理超大图片(1GB)需要特别注意内存管理和性能优化。以下是几种高效裁剪方案: 方法1:使用System.Drawing分块处理(内存优化版) using System; using System.Drawing; using System.Drawing.Imaging; us…...

数据库——SQL约束窗口函数介绍
4.SQL约束介绍 (1)主键约束 A、基本内容 基本内容 p r i m a r y primary primary k e y key key约束唯一表示数据库中的每条记录主键必须包含唯一的值(UNIQUE)主键不能包含NULL值(NOT NULL)每个表都应…...

Linux系统启动相关:vmlinux、vmlinuz、zImage,和initrd 、 initramfs,以及SystemV 和 SystemD
目录 一、vmlinux、vmlinuz、zImage、bzImage、uImage 二、initrd 和 initramfs 1、initrd(Initial RAM Disk) 2、initramfs(Initial RAM Filesystem) 3、initrd vs. initramfs 对比 4. 如何查看和生成 initramfs 三、Syste…...
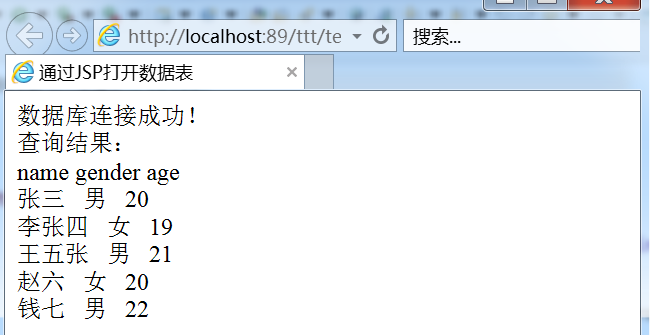
JSP链接MySQL8.0(Eclipse+Tomcat9.0+MySQL8.0)
所用环境 Eclipse Tomcat9.0 MySQL8.0.21(下载:MySQL Community Server 8.0.21 官方镜像源下载 | Renwole) mysql-connector-java-8.0.21(下载:MySQL :: Begin Your Download) .NET Framework 4.5.2(下…...

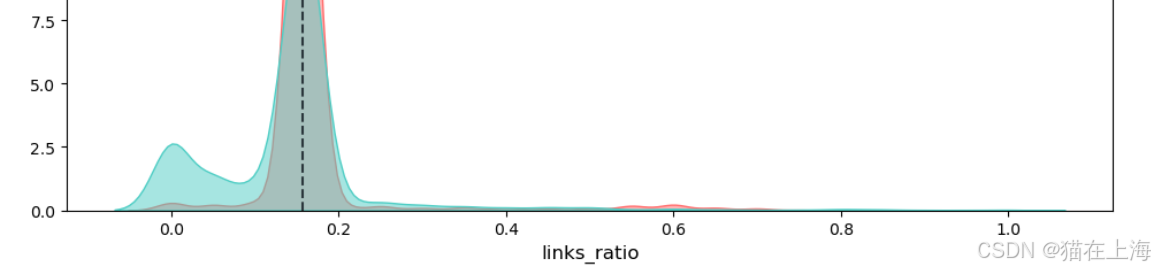
Python爬虫-爬取百度指数之人群兴趣分布数据,进行数据分析
前言 本文是该专栏的第56篇,后面会持续分享python爬虫干货知识,记得关注。 在本专栏之前的文章《Python爬虫-爬取百度指数之需求图谱近一年数据》中,笔者有详细介绍过爬取需求图谱的数据教程。 而本文,笔者将再以百度指数为例子,基于Python爬虫获取指定关键词的人群“兴…...

SEO长尾词与关键词优化实战
内容概要 在SEO优化体系中,长尾关键词与核心关键词的协同作用直接影响流量获取效率与用户转化路径。长尾词通常由3-5个词组构成,搜索量较低但意图明确,能精准触达细分需求用户;核心关键词则具备高搜索量与广泛覆盖能力࿰…...
机器学习-人与机器生数据的区分模型测试-数据处理1
附件为训练数据,总体的流程可以作为参考。 导入依赖 import pandas as pd import os import numpy as np from sklearn.model_selection import train_test_split,GridSearchCV from sklearn.ensemble import RandomForestClassifier,VotingClassifier from skle…...

HelloWorld
HelloWorld 新建一个java文件 文件后缀名为 .javahello.java【注意】系统可能没有显示文件后缀名,我们需要手动打开 编写代码 public class hello {public static void main(String[] args) {System.out.print(Hello,World)} }编译 javac java文件,会生…...

令牌桶和漏桶算法使用场景解析
文章目录 什么时候用令牌桶,什么时候用漏桶算法??先放结论 两个算法一眼看懂什么时候选令牌桶?什么时候选漏桶?组合用法(90% 的真实系统都会这么干)小结记忆 对令牌桶和漏桶组合用法再次详细叙述…...

轻量、优雅、高扩展的事件驱动框架——Hibiscus-Signal
在现代企业级应用中,事件驱动架构(EDA)已成为解耦系统、提升扩展性的利器。今天给大家推荐一个非常优秀的国产轻量级事件驱动框架 —— Hibiscus Signal,它不仅天然整合 Spring Boot,还提供完整的事件生命周期支持&…...
SEO 优化实战:ZKmall模板商城的 B2C商城的 URL 重构与结构化数据
在搜索引擎算法日益复杂的今天,B2C商城想要在海量信息中脱颖而出,仅靠优质商品和营销活动远远不够。ZKmall模板商城以实战为导向,通过URL 重构与结构化数据优化两大核心策略,帮助 B2C 商城实现从底层架构到搜索展示的全面升级&…...

2020CCPC河南省赛题解
A. 班委竞选 签到题,模拟。 #include <bits/stdc.h> #define x first #define y second #define int long long //#define double long doubleusing namespace std; typedef unsigned long long ULL ; typedef pair<int,int> PII ; typedef pair<d…...
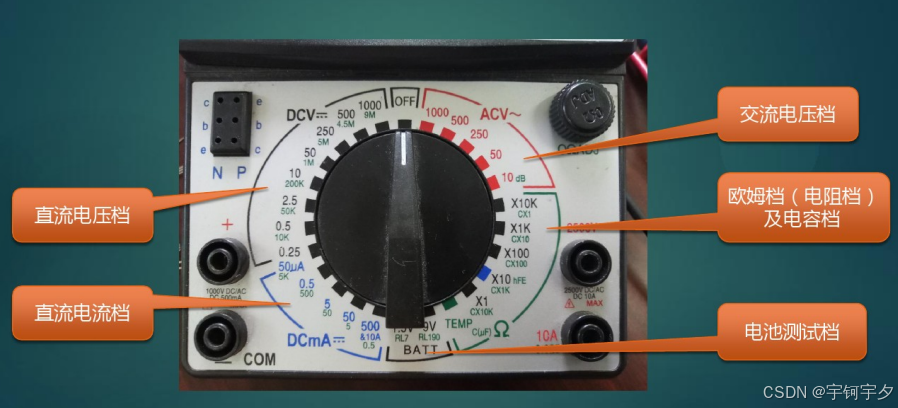
数字万用表与指针万用表使用方法及注意事项
在电子测量领域,万用表是极为常用的工具,数字万用表和指针万用表各具特点。熟练掌握它们的使用方法与注意事项,能确保测量的准确性与安全性。下面为您详细介绍: 一 、数字万用表按钮功能 > 进入及退出手动量程模式 每 按 […...

虚拟主播肖像权保护,数字时代的法律博弈
首席数据官高鹏律师团队 在虚拟主播行业蓬勃发展的表象之下,潜藏着一场关乎法律边界的隐形战争。当一位虚拟偶像的3D模型被非法拆解、面部数据被批量复制,运营方惊讶地发现——传统的肖像权保护体系,竟难以完全覆盖这具由代码与数据构成的“…...
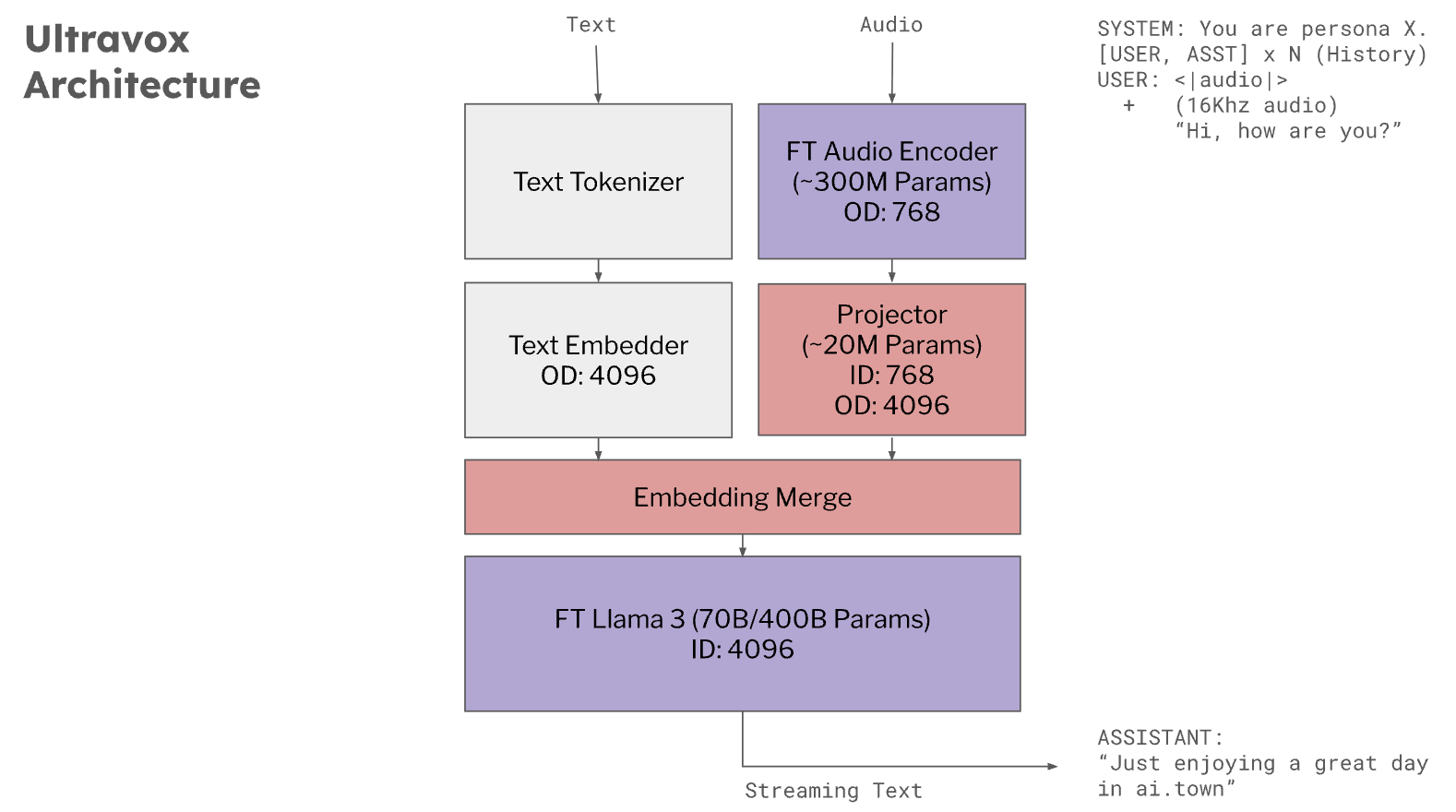
【读代码】端到端多模态语言模型Ultravox深度解析
一、项目基本介绍 Ultravox是由Fixie AI团队开发的开源多模态大语言模型,专注于实现音频-文本的端到端实时交互。项目基于Llama 3、Mistral等开源模型,通过创新的跨模态投影架构,绕过了传统语音识别(ASR)的中间步骤,可直接将音频特征映射到语言模型的高维空间。 核心优…...