MK米客方德SD NAND:无人机存储的高效解决方案
在无人机技术迅猛发展的当下,飞控系统的数据记录对于飞行性能剖析、故障排查以及飞行安全保障极为关键。以往,SD 卡是飞控 LOG 记录常见的存储介质,但随着技术的革新,新的存储方案不断涌现。本文聚焦于以 ESP32 芯片为主控制器的无人机,创新性采用 SD NAND 芯片 MKDV32GCL-STPA 芯片进行 SD NAND 存储,测试其在飞控 LOG 记录功能中的表现。
米客方德 SD NAND 芯片特性
免驱动优势:与普通存储设备不同,在该应用场景下,SD NAND 无需编写复杂的驱动程序。这极大地简化了开发流程,缩短了开发周期,减少了潜在的驱动兼容性问题,让开发者能够更专注于实现核心功能。
自带坏块管理功能:存储设备出现坏块难以避免,而 MKDV32GCL - STPA 芯片自带的坏块管理机制可自动检测并处理坏块。这确保了数据存储的可靠性,避免因坏块导致的数据丢失或错误写入,提升了整个存储系统的稳定性。
尺寸小巧与强兼容性:该 SD NAND 芯片尺寸小巧,对于空间有限的无人机内部布局而言,这一特性至关重要。它能轻松集成到无人机的飞控系统中,不占用过多宝贵空间。同时,其兼容性强,可与 ESP32 芯片以及整个飞控系统良好适配,无需进行过多硬件调整或优化。


米客方德 SD NAND 测试流程
飞机通电与姿态数据采集:无人机通电后,操作人员通过翻滚机身改变飞机姿态。在此过程中,飞控系统实时采集飞机的姿态角数据。ESP32 芯片作为主控制器,负责协调各传感器数据的采集与传输,并将姿态角数据按特定格式和协议整理,准备存储到 MK SD NAND 中。
LOG 目录创建:随着飞机姿态变化,飞控系统在 MK SD NAND 中成功建立 LOG 目录。该目录遵循特定的命名规则和文件结构,便于后续数据的有序存储与管理。目录的成功创建标志着 SD NAND 存储系统已准备好接收飞控 LOG 数据。
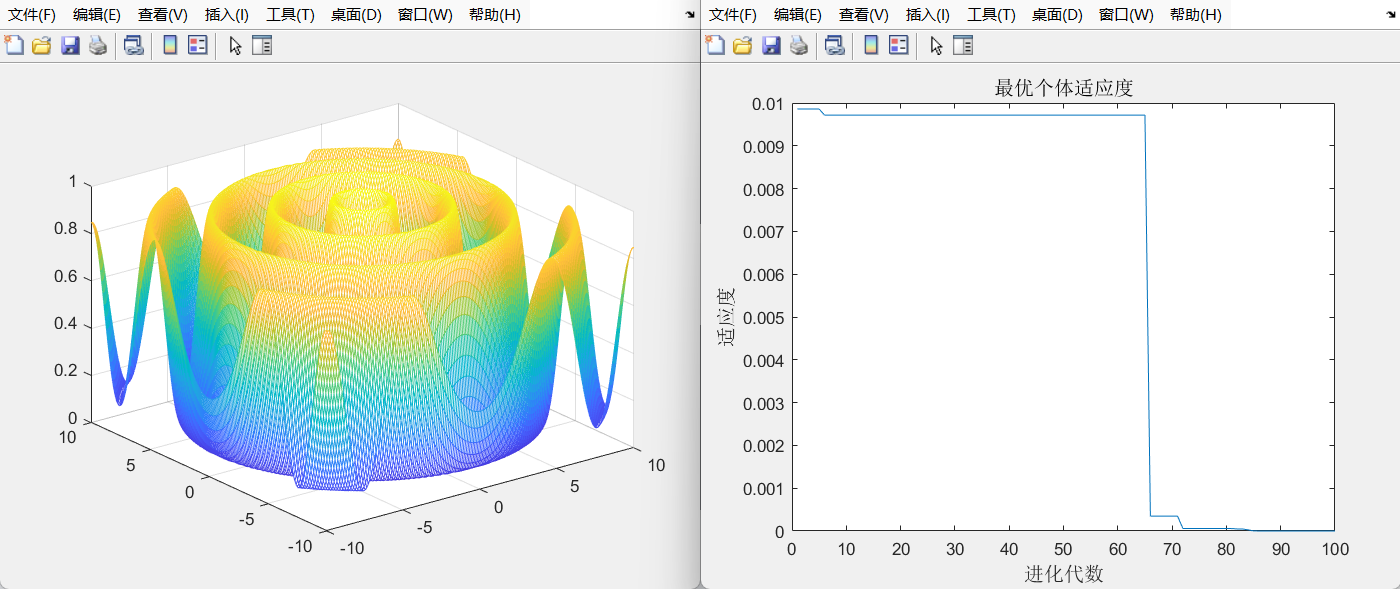
数据下载与分析:测试结束后,将 SD NAND 中的日志数据下载到 Mission Planner 软件中。Mission Planner 是一款功能强大的无人机地面站软件,广泛应用于无人机数据的分析与处理。在软件中,操作人员选中 ATT 字段中的 Roll(横滚角)和 Pitch(俯仰角),利用软件的绘图功能,可清晰看到曲线随飞机实际姿态变化。这些曲线直观反映了飞机飞行过程中的姿态变化,为后续飞行性能评估和问题诊断提供了重要依据。
测试成果与意义
通过本次测试,成功验证了使用 SD NAND 替代 SD 卡记录飞控 LOG 的功能。 米客方德的 SD NAND 在整个测试中展现出稳定性能。其可靠的数据存储能力确保了飞控 LOG 数据的完整性与准确性,曲线与飞机实际姿态的紧密贴合也证明了数据记录的实时性与有效性。这一成果不仅为无人机飞控数据记录提供了新的、更高效稳定的解决方案,也为未来无人机存储技术的进一步发展与优化奠定了基础,推动了无人机技术在更多领域的广泛应用与创新发展。
在无人机技术迅猛发展的当下,飞控系统的数据记录对于飞行性能剖析、故障排查以及飞行安全保障极为关键。以往,SD 卡是飞控 LOG 记录常见的存储介质,但随着技术的革新,新的存储方案不断涌现。本文聚焦于以 ESP32 芯片为主控制器的无人机,创新性采用 SD NAND 芯片 MKDV32GCL-STPA 芯片进行 SD NAND 存储,测试其在飞控 LOG 记录功能中的表现。
米客方德 SD NAND 芯片特性
免驱动优势:与普通存储设备不同,在该应用场景下,SD NAND 无需编写复杂的驱动程序。这极大地简化了开发流程,缩短了开发周期,减少了潜在的驱动兼容性问题,让开发者能够更专注于实现核心功能。
自带坏块管理功能:存储设备出现坏块难以避免,而 MKDV32GCL - STPA 芯片自带的坏块管理机制可自动检测并处理坏块。这确保了数据存储的可靠性,避免因坏块导致的数据丢失或错误写入,提升了整个存储系统的稳定性。
尺寸小巧与强兼容性:该 SD NAND 芯片尺寸小巧,对于空间有限的无人机内部布局而言,这一特性至关重要。它能轻松集成到无人机的飞控系统中,不占用过多宝贵空间。同时,其兼容性强,可与 ESP32 芯片以及整个飞控系统良好适配,无需进行过多硬件调整或优化。
米客方德 SD NAND 测试流程
飞机通电与姿态数据采集:无人机通电后,操作人员通过翻滚机身改变飞机姿态。在此过程中,飞控系统实时采集飞机的姿态角数据。ESP32 芯片作为主控制器,负责协调各传感器数据的采集与传输,并将姿态角数据按特定格式和协议整理,准备存储到 MK SD NAND 中。
LOG 目录创建:随着飞机姿态变化,飞控系统在 MK SD NAND 中成功建立 LOG 目录。该目录遵循特定的命名规则和文件结构,便于后续数据的有序存储与管理。目录的成功创建标志着 SD NAND 存储系统已准备好接收飞控 LOG 数据。
数据下载与分析:测试结束后,将 SD NAND 中的日志数据下载到 Mission Planner 软件中。Mission Planner 是一款功能强大的无人机地面站软件,广泛应用于无人机数据的分析与处理。在软件中,操作人员选中 ATT 字段中的 Roll(横滚角)和 Pitch(俯仰角),利用软件的绘图功能,可清晰看到曲线随飞机实际姿态变化。这些曲线直观反映了飞机飞行过程中的姿态变化,为后续飞行性能评估和问题诊断提供了重要依据。
测试成果与意义
通过本次测试,成功验证了使用 SD NAND 替代 SD 卡记录飞控 LOG 的功能。 米客方德的 SD NAND 在整个测试中展现出稳定性能。其可靠的数据存储能力确保了飞控 LOG 数据的完整性与准确性,曲线与飞机实际姿态的紧密贴合也证明了数据记录的实时性与有效性。这一成果不仅为无人机飞控数据记录提供了新的、更高效稳定的解决方案,也为未来无人机存储技术的进一步发展与优化奠定了基础,推动了无人机技术在更多领域的广泛应用与创新发展。
在无人机技术迅猛发展的当下,飞控系统的数据记录对于飞行性能剖析、故障排查以及飞行安全保障极为关键。以往,SD 卡是飞控 LOG 记录常见的存储介质,但随着技术的革新,新的存储方案不断涌现。本文聚焦于以 ESP32 芯片为主控制器的无人机,创新性采用 SD NAND 芯片 MKDV32GCL-STPA 芯片进行 SD NAND 存储,测试其在飞控 LOG 记录功能中的表现。
米客方德 SD NAND 芯片特性
免驱动优势:与普通存储设备不同,在该应用场景下,SD NAND 无需编写复杂的驱动程序。这极大地简化了开发流程,缩短了开发周期,减少了潜在的驱动兼容性问题,让开发者能够更专注于实现核心功能。
自带坏块管理功能:存储设备出现坏块难以避免,而 MKDV32GCL - STPA 芯片自带的坏块管理机制可自动检测并处理坏块。这确保了数据存储的可靠性,避免因坏块导致的数据丢失或错误写入,提升了整个存储系统的稳定性。
尺寸小巧与强兼容性:该 SD NAND 芯片尺寸小巧,对于空间有限的无人机内部布局而言,这一特性至关重要。它能轻松集成到无人机的飞控系统中,不占用过多宝贵空间。同时,其兼容性强,可与 ESP32 芯片以及整个飞控系统良好适配,无需进行过多硬件调整或优化。
米客方德 SD NAND 测试流程
飞机通电与姿态数据采集:无人机通电后,操作人员通过翻滚机身改变飞机姿态。在此过程中,飞控系统实时采集飞机的姿态角数据。ESP32 芯片作为主控制器,负责协调各传感器数据的采集与传输,并将姿态角数据按特定格式和协议整理,准备存储到 MK SD NAND 中。
LOG 目录创建:随着飞机姿态变化,飞控系统在 MK SD NAND 中成功建立 LOG 目录。该目录遵循特定的命名规则和文件结构,便于后续数据的有序存储与管理。目录的成功创建标志着 SD NAND 存储系统已准备好接收飞控 LOG 数据。
数据下载与分析:测试结束后,将 SD NAND 中的日志数据下载到 Mission Planner 软件中。Mission Planner 是一款功能强大的无人机地面站软件,广泛应用于无人机数据的分析与处理。在软件中,操作人员选中 ATT 字段中的 Roll(横滚角)和 Pitch(俯仰角),利用软件的绘图功能,可清晰看到曲线随飞机实际姿态变化。这些曲线直观反映了飞机飞行过程中的姿态变化,为后续飞行性能评估和问题诊断提供了重要依据。
测试成果与意义
通过本次测试,成功验证了使用 SD NAND 替代 SD 卡记录飞控 LOG 的功能。 米客方德的 SD NAND 在整个测试中展现出稳定性能。其可靠的数据存储能力确保了飞控 LOG 数据的完整性与准确性,曲线与飞机实际姿态的紧密贴合也证明了数据记录的实时性与有效性。这一成果不仅为无人机飞控数据记录提供了新的、更高效稳定的解决方案,也为未来无人机存储技术的进一步发展与优化奠定了基础,推动了无人机技术在更多领域的广泛应用与创新发展。
相关文章:
MK米客方德SD NAND:无人机存储的高效解决方案
在无人机技术迅猛发展的当下,飞控系统的数据记录对于飞行性能剖析、故障排查以及飞行安全保障极为关键。以往,SD 卡是飞控 LOG 记录常见的存储介质,但随着技术的革新,新的存储方案不断涌现。本文聚焦于以 ESP32 芯片为主控制器的无…...
【vscode】解决vscode无法安装远程服务器插件问题,显示正在安装
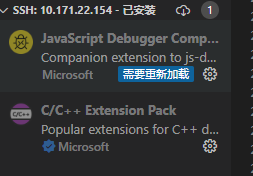
文章目录 现状分析采用VSIX离线安装第一步:离线下载插件包第二步:把下载好的插件文件上传到远程服务器上第三步:在windows下打开vscode,并链接远端,进行安装 现状分析 vscode无法远程安装扩展插件,显示正在…...

1688 数据接口调用秘籍:高效获取商品实时信息的开发指南
在电商行业竞争白热化的当下,企业想要抢占市场先机,实时掌握商品信息至关重要。作为国内 B2B 电商巨头,1688 平台汇聚海量商品资源,通过高效调用其数据接口获取商品实时信息,能为企业价格策略制定、库存管理、竞品分析…...
【Spring】Spring的请求处理
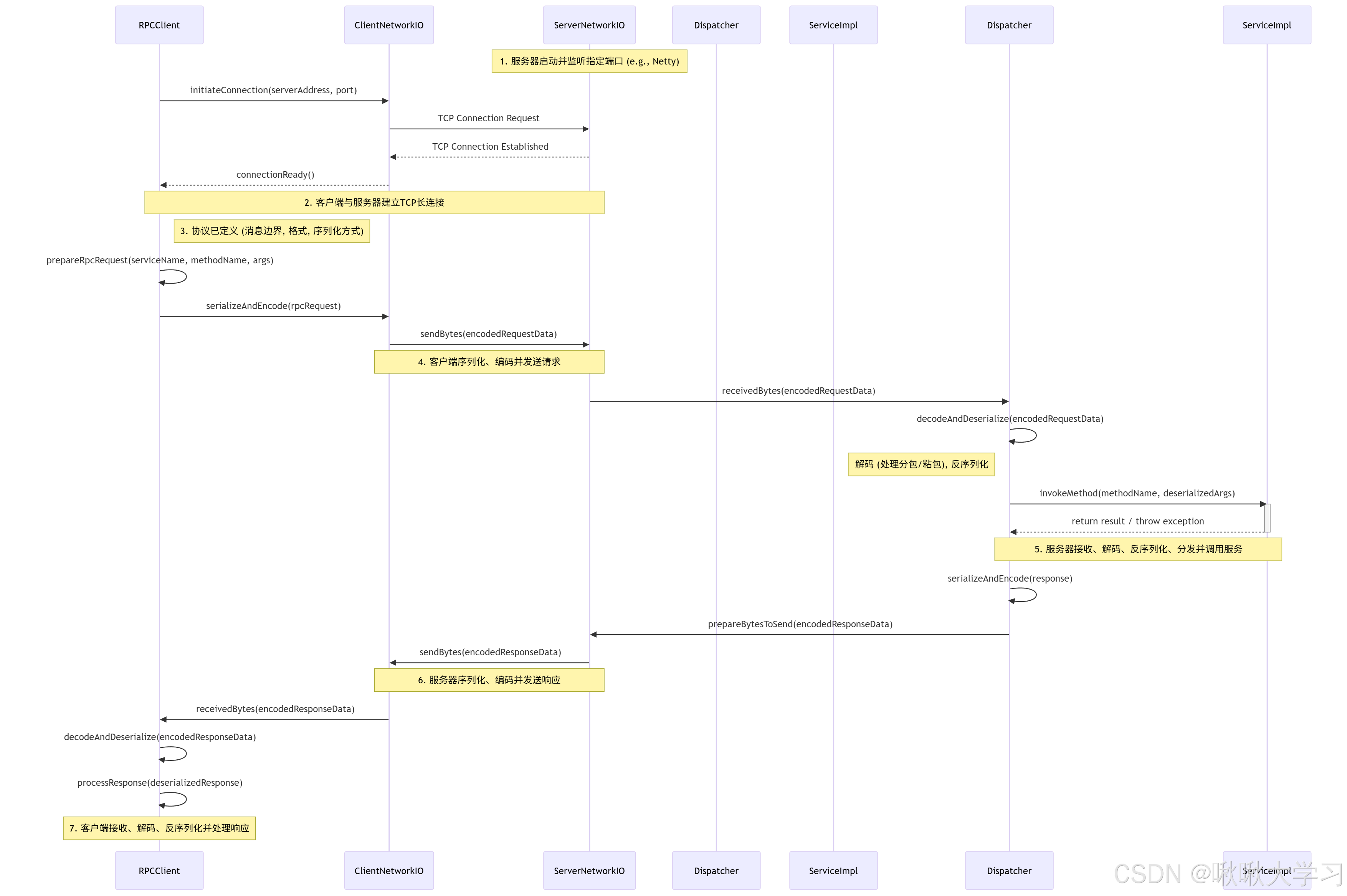
欢迎来到啾啾的博客🐱。 记录学习点滴。分享工作思考和实用技巧,偶尔也分享一些杂谈💬。 欢迎评论交流,感谢您的阅读😄。 目录 引言HTTP/HTTPS协议Spring Web与Spring Web MVCSpring WebFlux 自定义的TPC/IP协议FTP、S…...
粒子群算法(PSO算法)
粒子群算法概述 1.粒子群优化算法(Particle Swarm Optimization,简称PSO)。粒子群优化算法是在1995年由Kennedy博士和Eberhart博士一起提出的,它源于对鸟群捕食行为的研究。 2.基本核心是利用群体中的个体对信息的共享从而使得整…...

git提交库常用词
新功能 feat修改BUG fix文档修改 docs格式修改 style重构 refactor性能提升 perf测试 test构建系统 build对CI配置文件修改 ci修改构建流程、或增加依赖库、工具 chore回滚版本 revert...
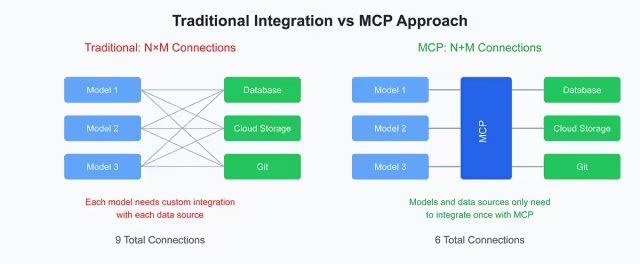
LLM智能体新纪元:深入解析MCP与A2A协议,赋能智能自动化协作
LLM智能体(LLM agents)是能够自主行动以实现特定目标的AI系统。在实际应用中,智能体能够将用户请求拆解为多个步骤,利用知识库或API获取数据,最终整合出答案。这让智能体相比于传统独立聊天机器人拥有更强大的能力——…...
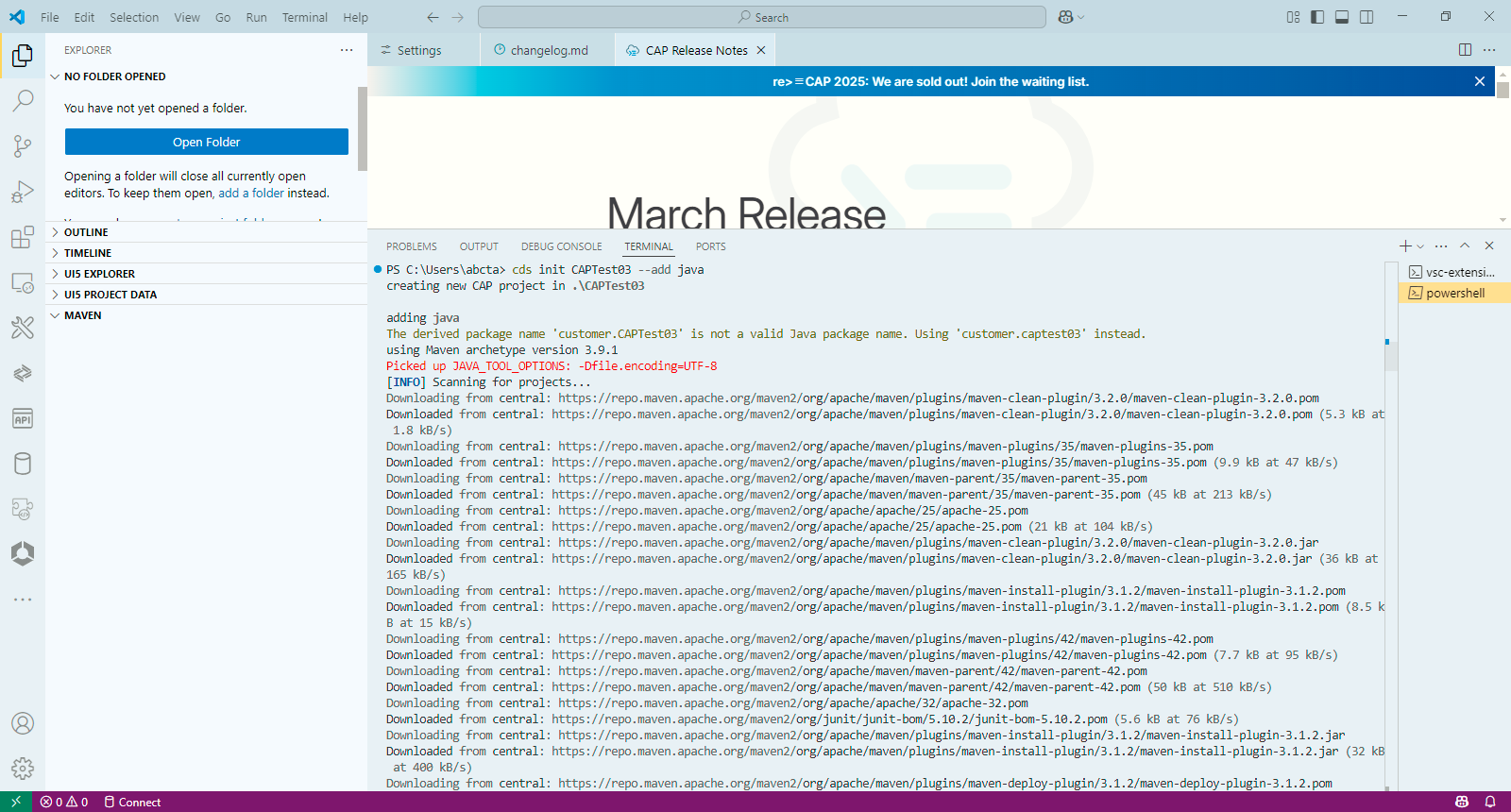
SAP学习笔记 - 开发豆知识01 - CDS SDK命令出乱码 (cds init CAP-Test03 --add java)
1,现象 安装完VSCode以及各种需要的插件(比如SAP CDS Language Support),就可以做CAP开发。 用这个命令创建Project:cds init CAP-Test03 --add java 然后出来一个乱码错误 adding java The derived package name c…...

(C语言)超市管理系统 (正式版)(指针)(数据结构)(清屏操作)(文件读写)(网页版预告)(html)(js)(json)
目录 前言: 源代码: product.h product.c fileio.h fileio.c main.c json_export.h json_export.c tasks.json idex.html script.js 相关步骤: 第一步: 第二步: 第三步: 第四步: 第五步…...
进阶-数据结构部分:2、常用排序算法
飞书文档https://x509p6c8to.feishu.cn/wiki/FfpIwIPtviMMb4kAn3Sc40ABnUh 常用排序算法 这几种算法都是常见的排序算法,它们的优劣和适用场景如下: 冒泡排序(Bubble Sort):简单易懂,时间复杂度较高&…...

解决 Three.js Raycaster 点击位置与实际交点偏差问题
当使用 Three.js 的 Raycaster 时,如果发现点击位置与显示的碰撞点之间存在较大偏差,这通常是由于坐标系统不匹配或参数设置不正确导致的。以下是系统性的排查和解决方案: 1. 检查鼠标坐标转换 最常见的偏差原因是鼠标坐标到标准化设备坐标…...
25、DeepSeek-R1论文笔记
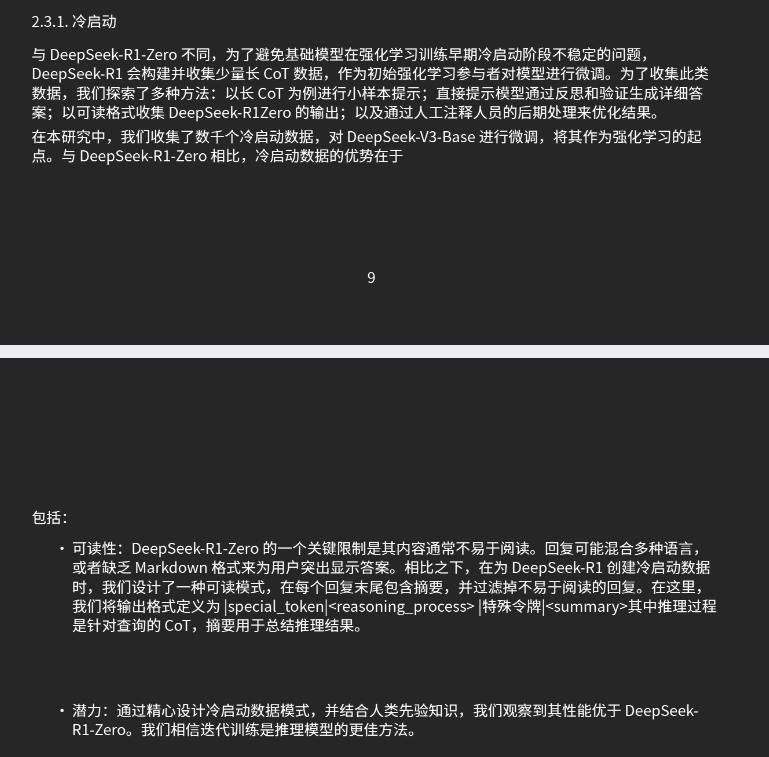
DeepSeek-R1论文笔记 1、研究背景与核心目标2、核心模型与技术路线3、蒸馏技术与小模型优化4、训练过程简介5、COT思维链(Chain of Thought)6、强化学习算法(GRPO)7、冷启动**1. 冷启动的目的****2. 冷启动的实现步骤****3. 冷启动…...
LeetCode --- 156双周赛
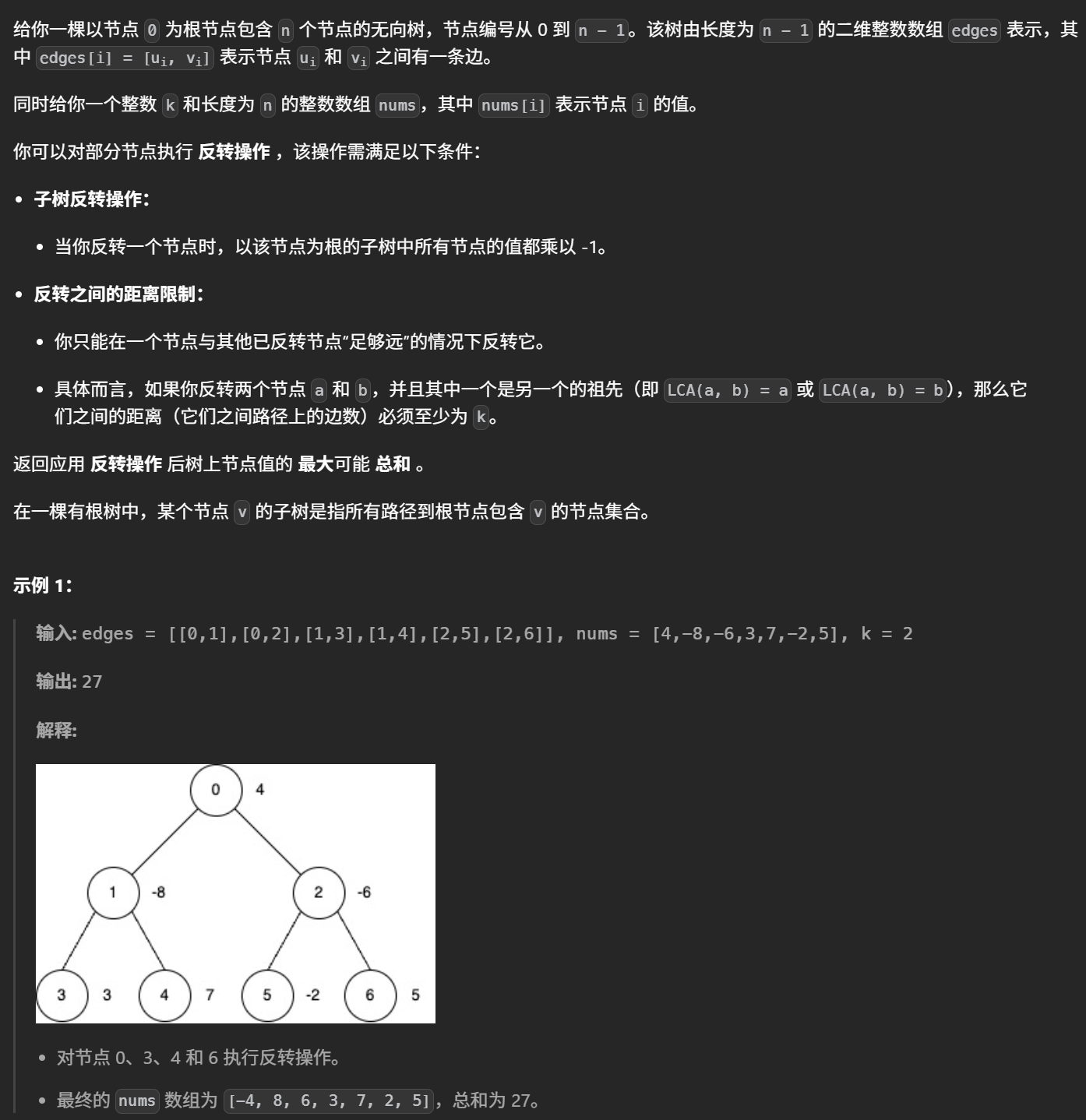
题目列表 3541. 找到频率最高的元音和辅音 3542. 将所有元素变为 0 的最少操作次数 3543. K 条边路径的最大边权和 3544. 子树反转和 一、找到频率最高的元音和辅音 分别统计元音和辅音的出现次数最大值,然后相加即可,代码如下 // C class Solution {…...

模型量化AWQ和GPTQ哪种效果好?
环境: AWQ GPTQ 问题描述: 模型量化AWQ和GPTQ哪种效果好? 解决方案: 关于AWQ(Adaptive Weight Quantization)和GPTQ(Generative Pre-trained Transformer Quantization)这两种量化方法的…...
npm 报错 gyp verb `which` failed Error: not found: python2 解决方案
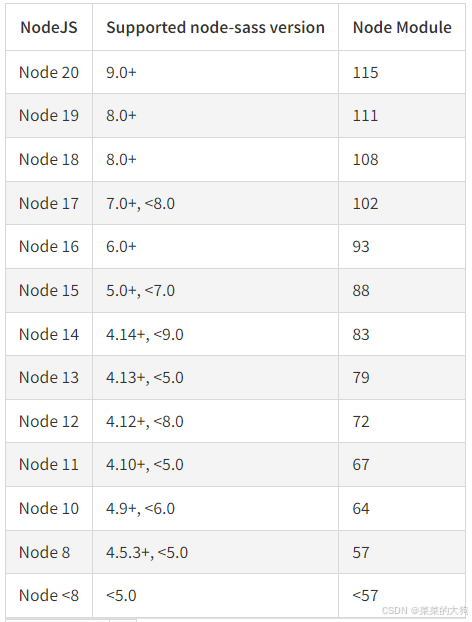
一、背景 npm 安装依赖报如下错: gyp verb check python checking for Python executable "python2" in the PATH gyp verb which failed Error: not found: python2 一眼看过去都觉得是Python环境问题,其实并不是你python环境问题…...
初识Linux · IP协议· 下
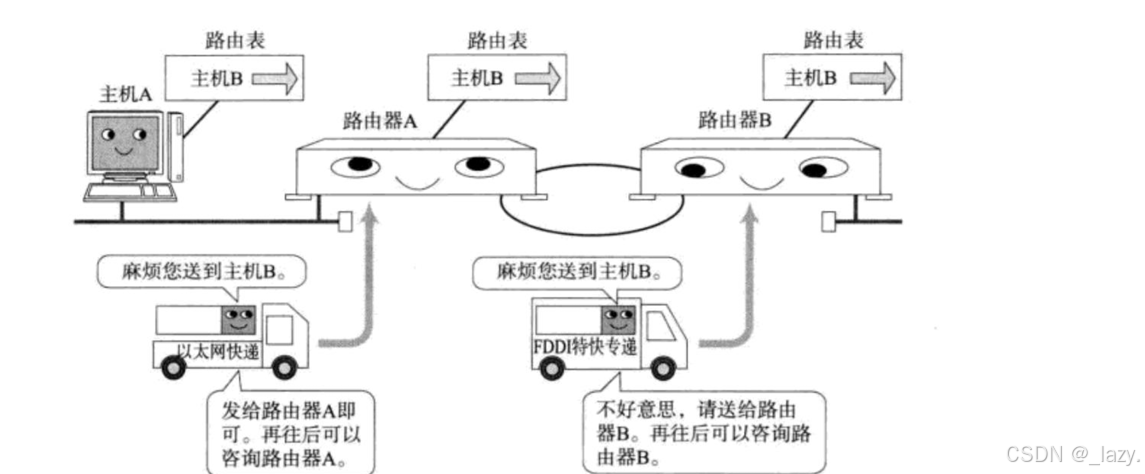
目录 前言: 内网IP和公网IP 内网IP 公网IP 路由 前言: 前文我们介绍了IP协议的协议头,通过源码等方式我们理解了IP协议中的字段,比如8位协议,比如通过环回问题引出的8位最大生存时间,比如8位协议&…...

5.27本日总结
一、英语 复习list2list29 二、数学 学习14讲部分内容 三、408 学习计组1.2内容 四、总结 高数和计网明天结束当前章节,计网内容学完之后主要学习计组和操作系统 五、明日计划 英语:复习lsit3list28,完成07年第二篇阅读 数学&#…...

JavaScript基础-创建对象的三种方式
在JavaScript中,对象是构建复杂数据结构和实现面向对象编程的核心。掌握如何创建对象对于每个开发者来说都是必不可少的技能。本文将介绍创建JavaScript对象的三种主要方式:对象字面量、构造函数以及类(ES6引入),并探讨…...
JAVA的常见API文档(上)
游戏打包 注意API文档中的方法不需要记忆!! 了解之后如果需要可以查询API文档 对Math的方法总结: 运用刚学的Math方法加快代码的运行效率 可以减少循环次数 找规律: 发现因子有规律: 必定一个大于平方根,…...

JavaScript 中的 for...in 和 for...of 循环详解
在 JavaScript 中,for...in 和 for...of 是两种常用的循环结构,但它们有着不同的用途和行为。很多初学者容易混淆这两者,本文将详细解析它们的区别、适用场景以及注意事项。 目录 for…in 循环 基本用法遍历对象属性注意事项 for…of 循环 …...

AtCoder AT_abc406_c [ABC406C] ~
前言 除了 A 题,唯一一道一遍过的题。 题目大意 我们定义满足以下所有条件的一个长度为 N N N 的序列 A ( A 1 , A 2 , … , A N ) A(A_1,A_2,\dots,A_N) A(A1,A2,…,AN) 为波浪序列: N ≥ 4 N\ge4 N≥4(其实满足后面就必须满足这…...
Spark,连接MySQL数据库,添加数据,读取数据
连接数据库 可以看到shell中我们读取出的数据 在IDEA中打代码如果能输出跟shell中一样的结果即证明连接成功 【出错反思】 像我前面出错的原因就是在打代码时将密码输入错误 添加数据 读取数据就是在上面代码中一起展示了,这里我就不单独说了...

Linux容器技术详解
容器技术基础 什么是容器 容器是一种轻量级的虚拟化技术,它将应用程序及其依赖(库、二进制文件、配置文件等)打包在一个独立的单元中,可以在任何支持容器运行时的环境中一致地运行。 Docker官网:https://www.docker…...
【EDA软件】【联合Modelsim仿真使用方法】
背景 业界EDA工具仿真功能是必备的,例如Vivado自带仿真工具,且无需联合外部仿真工具,例如MoodelSim。 FUXI工具仿真功能需要联合Modelsim,才能实现仿真功能。 方法一:FUXI联合ModelSim 1 添加testbench文件 新建to…...

STM32 __main
STM32开发中__main与用户main()函数的本质区别及工作机制 在STM32开发中,__main和用户定义的main()函数是启动过程中的两个关键节点,分别承担运行时初始化和用户程序入口的职责。以下是它们的核心差异及协作机制: 一、定义与层级差异 __ma…...
【离散化 线段树】P3740 [HAOI2014] 贴海报|普及+
本文涉及知识点 C线段树 [HAOI2014] 贴海报 题目描述 Bytetown 城市要进行市长竞选,所有的选民可以畅所欲言地对竞选市长的候选人发表言论。为了统一管理,城市委员会为选民准备了一个张贴海报的 electoral 墙。 张贴规则如下: electoral…...

Python训练营打卡Day28
浙大疏锦行 DAY 28 类的定义和方法 知识点回顾: 1.类的定义 2.pass占位语句 3.类的初始化方法 4.类的普通方法 5.类的继承:属性的继承、方法的继承 作业 题目1:定义圆(Circle)类 要求: 1.包含属性&#x…...

MODBUS RTU通信协议详解与调试指南
一、MODBUS RTU简介 MODBUS RTU(Remote Terminal Unit)是一种基于串行通信(RS-485/RS-232)的工业标准协议,采用二进制数据格式,具有高效、可靠的特点,广泛应用于PLC、传感器、变频器等工业设备…...
CSP 2024 提高级第一轮(CSP-S 2024)单选题解析
单选题解析 第 1 题 在 Linux 系统中,如果你想显示当前工作目录的路径,应该使用哪个命令?(A) A. pwd B. cd C. ls D. echo 解析:Linux 系统中,pwd命令可以显示当前工作目录的路径。pwd&#x…...

六、绘制图片
文章目录 1.创建一个红色图片2.加载bmp图片3.加载png、jpg图片 前面的几个示例,我们已经展示过如果在Linux系统下使用xlib接口向窗口中绘制文本、线、矩形;并设置文本、线条的颜色。并利用xlib提供的接口结合事件处理机制完成了一个自绘按钮控件功能。有…...