Ansys 计算刚柔耦合矩阵系数
Ansys 计算刚柔耦合系数矩阵
文章目录
- Ansys 计算刚柔耦合系数矩阵
- 卫星的刚柔耦合动力学模型
- 采用 ANSYS 的 APDL 语言的计算方法
- 系统转动惯量的求解方法
- 参考文献
卫星的刚柔耦合动力学模型
-
柔性航天器的刚柔耦合动力学模型可以表示为
m v ˙ + B t r a n η ¨ = F J ω ˙ + ω × J ω + B r o t η ¨ + ω × B r o t η ˙ = T η ¨ + 2 ξ Ω η ˙ + Ω 2 η + B r o t T ω ˙ + B t r a n T v ˙ = 0 \begin{align} \boldsymbol{m}\dot{\boldsymbol{v}} + \boldsymbol{B}_{tran}\ddot{\boldsymbol{\eta}} &= \boldsymbol{F}\\ \boldsymbol{J}\dot{\boldsymbol{\omega}}+\boldsymbol{\omega}^\times\boldsymbol{J}\boldsymbol{\omega}+\boldsymbol{B}_{rot}\ddot{\boldsymbol{\eta}}+\boldsymbol{\omega}^\times\boldsymbol{B}_{rot}\dot{\boldsymbol{\eta}}&=\boldsymbol{T}\\ \ddot{\boldsymbol{\eta}}+2\boldsymbol{\xi}\boldsymbol{\Omega}\dot{\boldsymbol{\eta}}+\boldsymbol{\Omega}^2\boldsymbol{\eta}+\boldsymbol{B}_{rot}^T\dot{\boldsymbol{\omega}} + \boldsymbol{B}_{tran}^T\dot{\boldsymbol{v}}&=\boldsymbol{0} \end{align} mv˙+Btranη¨Jω˙+ω×Jω+Brotη¨+ω×Brotη˙η¨+2ξΩη˙+Ω2η+BrotTω˙+BtranTv˙=F=T=0
式中:- m \boldsymbol{m} m, J J J 分别表示柔性航天器的质量和转动惯量矩阵;
- v \boldsymbol{v} v, ω \boldsymbol{\omega} ω 分别表示航天器本体相对于惯性系的线速度和角速度矢量;
- F \boldsymbol{F} F, T \boldsymbol{T} T 分别表示航天受到的三轴控制力和控制力矩;
- η \boldsymbol{\eta} η, ξ \boldsymbol{\xi} ξ, Ω \boldsymbol{\varOmega} Ω 分别表示航天器的模态位移向量,柔性振动的阻尼比和频率矩阵;
- B t r a n = A ⋅ B t r a n b \boldsymbol{B}_{tran}=A\cdot \boldsymbol{B}_{tran}^b Btran=A⋅Btranb 为柔性附件在航天器坐标系中相对于航天器本体的平动耦合系数矩阵, A \boldsymbol{A} A为柔性附件坐标系到卫星坐标系的转移矩阵, B t r a n b \boldsymbol{B}_{tran}^b Btranb 为柔性附件在自身坐标系中相对于航天器本体的平动耦合系数矩阵;
- B r o t = l p × B t r a n + A B r o t b \boldsymbol{B}_{rot} = \boldsymbol{l}_p^\times \boldsymbol{B}_{tran} + \boldsymbol{A}\boldsymbol{B}_{rot}^b Brot=lp×Btran+ABrotb 为柔性附件在航天器坐标系中相对于坐标原点的转动耦合矩阵, l p \boldsymbol{l}_p lp 为由航天器质心指向柔性附件坐标原点的向量, × ^\times × 表示反对称矩阵, B r o t b \boldsymbol{B}_{rot}^b Brotb 为柔性附件在自身坐标系中相对于坐标原点的转动耦合系数。
-
B t r a n \boldsymbol{B}_{tran} Btran 和 B r o t \boldsymbol{B}_{rot} Brot 的表达式如式(4)和式(5)所示
B t r a n = [ B t r a n 1 B t r a n 2 ⋯ B t r a n i ⋯ B t r a n m ] T B r o t = [ B r o t 1 B r o t 2 ⋯ B r o t i ⋯ B r o t m ] \begin{align} \boldsymbol{B}_{tran} &= \begin{bmatrix} \boldsymbol{B}_{tran}^1 & \boldsymbol{B}_{tran}^2 & \cdots & \boldsymbol{B}_{tran}^i & \cdots & \boldsymbol{B}_{tran}^m \end{bmatrix}^T \\ \boldsymbol{B}_{rot} &= \begin{bmatrix} \boldsymbol{B}_{rot}^1 & \boldsymbol{B}_{rot}^2 & \cdots & \boldsymbol{B}_{rot}^i & \cdots & \boldsymbol{B}_{rot}^m \end{bmatrix} \end{align} BtranBrot=[Btran1Btran2⋯Btrani⋯Btranm]T=[Brot1Brot2⋯Broti⋯Brotm]
其中, m m m 为模态截断阶数;每个元素 B t r a n / r o t i \boldsymbol{B}_{tran/rot}^i Btran/roti 为 3 × 1 3\times1 3×1 的向量。 -
B t r a n i \boldsymbol{B}_{tran}^i Btrani 和 B r o t i \boldsymbol{B}_{rot}^i Broti 的表达式如式(6)和式(7)所示
B t r a n i = ∑ k = 1 n m k Φ k i = ∑ k = 1 n m k [ u k x i u k y i u k z i ] B r o t i = ∑ k = 1 m m k r k × Φ k i = ∑ k = 1 n m k [ 0 − r k z r k y r k z 0 − r k − r k y r k x 0 ] [ u k x i u k y i u k z i ] \begin{align} \boldsymbol{B}_{tran}^i &= \sum_{k=1}^nm_k\boldsymbol{\varPhi}_k^i = \sum_{k=1} ^n m_k\begin{bmatrix} u_{kx}^i \\ u_{ky}^i \\ u_{kz}^i\end{bmatrix} \\ \boldsymbol{B}_{rot}^i &= \sum_{k=1}^m m_k \boldsymbol{r}_k^\times\boldsymbol{\varPhi}_k^i = \sum_{k=1}^n m_k \begin{bmatrix} 0 & -r_{kz} & r_{ky} \\ r_{kz} & 0 & -r_k \\ -r_{ky} & r_{kx} & 0 \end{bmatrix} \begin{bmatrix} u_{kx}^i \\ u_{ky}^i \\ u_{kz}^i \end{bmatrix} \end{align} BtraniBroti=k=1∑nmkΦki=k=1∑nmk ukxiukyiukzi =k=1∑mmkrk×Φki=k=1∑nmk 0rkz−rky−rkz0rkxrky−rk0 ukxiukyiukzi
其中, n n n 为柔性结构离散后单元总数, m k m_k mk 为第 k k k 个单元的质量, u k u_k uk 为第 k k k 个单元质心的位移, r k r_k rk 为第 k k k 个单元质心的位置。上述参量中,单元的质量和质心位置可直接从有限元模型中读取;单元的质心处位移需要在每阶模态的振型结果中读取。
采用 ANSYS 的 APDL 语言的计算方法
-
程序主要分为四部分
- 第一部分是建立结构有限元模型进行模态分析,不再赘述。
- 第二部分是采用 *get 命令提取所有单元的质量、质心坐标。
- 第三部分是在每阶振型下分别计算所有单元的位移,每个单元的位移取为单元所有节点的位移平均值。
- 第四部分是把所有单元质量、质心坐标和位移代入公式(4)和式(5)计算 B t r a n \boldsymbol{B}_{tran} Btran 和 B r o t \boldsymbol{B}_{rot} Brot 。
-
参考APDL代码
! ———————————————————— 计算平动耦合系数矩阵和转动耦合系数矩阵 ———————————————————— !!!!!!!!!!!!!!!!!!!! /POST1!——————————! 提取所有单元的质量、质心坐标 !——————————! *GET, Num_Element, ELEM, ,COUNT ! 获取模型中单元总数 *GET, cnt_element, ELEM, ,NUM,MIN ! 获取模型中第一个单元的编号 *DIM, Amat2, ,Num_Element,5 ! 定义一个二维矩阵 *DO, NE, 1,Num_Element,1 ! 遍历所有单元Amat2(NE, 1) = cnt_element ! 第1列存储当前单元编号*GET, volu_e, ELEM, cnt_element, VOLU ! 获取当前单元的体积*GET, mat_e, ELEM, cnt_element, ATTR,MAT ! 获取材料编号dens_e = mat_mp(mat_e,1) ! 密度 !! 注意,如果涉及多种密度,需要自定义一个矩阵,按材料序号顺序存放密度信息,比如这里的矩阵mat_mp,其第一列是密度信息。!!Amat2(NE, 2) = volu_e*dens_e ! 第2列存储当前单元质量! 获取单元质心位置*GET, cent_x, ELEM, cnt_element,CENT,X*GET, cent_y, ELEM, cnt_element,CENT,Y*GET, cent_z, ELEM, cnt_element,CENT,ZAmat2(NE, 3) = cent_x ! 第3列存储单元质心X轴位置Amat2(NE, 4) = cent_y ! 第4列存储单元质心Y轴位置Amat2(NE, 5) = cent_z ! 第5列存储单元质心Z轴位置*GET, cnt_element, ELEM,cnt_element,NXTH ! 获取下一个单元编号 *ENDDO *DMAT, TableA, D, ALLOC, Num_Element,5 *DO, i,1,Num_Element,1*DO,j,1,5,1TableA(i,j) = Amat2(i, j)*ENDDO *ENDDO *PRINT, TableA,TableA.txt!——————————! 从模态分析每一阶结果中提取单元的质心位移 !——————————! *DIM, Bmat3, ,Num_Element,4,Num_Modal ! 定义一个三维矩阵 !! Num_Modal为自定义 !! *DO, NM, 1,Num_Modal,1 ! 遍历所有模态SET,,,,,,,NM ! 从结果文件中读取指定编号的数据集*GET, cnt_element, ELEM, ,NUM,MIN ! 获取模型中第一个单元的编号*DO, NE, 1,Num_Element,1 ! 遍历所有单元Bmat3(NE, 1, NM) = cnt_element ! 第1列存储当前单元编号! 重置单元位移elem_x = 0elem_y = 0elem_z = 0ESEL,S,,,cnt_element ! 选择指定单元编号的单元NSLE,S,ALL ! 选择附属在单元上的所有节点*GET, Num_Node, NODE,,COUNT ! 获取节点总数*GET, cnt_node, NODE,,NUM,MIN ! 获取第一个节点的编号*DO,NN, 1,Num_Node,1 ! 遍历所有节点! 获取节点的位移*GET, node_x, NODE, cnt_node,U,X*GET, node_y, NODE, cnt_node,U,Y*GET, node_z, NODE, cnt_node,U,Z! 计算该单元中节点位移的总和elem_x = elem_x+node_xelem_y = elem_y+node_yelem_z = elem_z+node_zcnt_node = NDNEXT(cnt_node) ! 获取下一个节点编号*ENDDOBmat3(NE,2,NM) = elem_x/Num_Node ! 第2列存储当前单元X轴位移Bmat3(NE,3,NM) = elem_y/Num_Node ! 第3列存储当前单元Y轴位移Bmat3(NE,4,NM) = elem_z/Num_Node ! 第4列存储当前单元Z轴位移ESEL,ALL ! 重新选择所有单元*GET, cnt_element, ELEM,cnt_element,NXTH! 获取下一个单元编号*ENDDO *ENDDO *DMAT, TableB1, D, ALLOC, Num_Element,4 *DMAT, TableB2, D, ALLOC, Num_Element,4 *DO, i,1,Num_Element,1*DO,j,1,4,1TableB1(i,j) = Bmat3(i,j,1)TableB2(i,j) = Bmat3(i,j,2)*ENDDO *ENDDO *PRINT, TableB1,TableB.txt *PRINT, TableB2,TableB.txt!——————————! 计算平动与转动耦合系数矩阵 !——————————! *DMAT, Btran, D, ALLOC, 3,Num_Modal ! 定义平动耦合系数矩阵 *DMAT, Brot, D, ALLOC, 3,Num_Modal ! 定义转动耦合系数矩阵 !*DIM, Btran, ,3,Num_Modal !*DIM, Brot, ,3,Num_Modal *DO, NM,1,Num_Modal,1 ! 遍历模态! 重置平动标量tran_x = 0tran_y = 0tran_z = 0! 重置转动标量rot_x = 0rot_y = 0rot_z = 0*DO,NE,1,Num_Element,1 ! 遍历单元! 平动tran_x = tran_x+Amat2(NE,2)*Bmat3(NE,2,NM)tran_y = tran_y+Amat2(NE,2)*Bmat3(NE,3,NM)tran_z = tran_z+Amat2(NE,2)*Bmat3(NE,4,NM)! 临时变量tmp_x = Amat2(NE,4)*Bmat3(NE,4,NM)-Amat2(NE,5)*Bmat3(NE,3,NM)tmp_y = Amat2(NE,5)*Bmat3(NE,2,NM)-Amat2(NE,3)*Bmat3(NE,4,NM)tmp_z = Amat2(NE,3)*Bmat3(NE,3,NM)-Amat2(NE,4)*Bmat3(NE,2,NM)! 转动rot_x = rot_x+Amat2(NE,2)*tmp_xrot_y = rot_y+Amat2(NE,2)*tmp_yrot_z = rot_z+Amat2(NE,2)*tmp_z*ENDDOBtran(1,NM) = tran_xBtran(2,NM) = tran_yBtran(3,NM) = tran_zBrot(1,NM) = rot_xBrot(2,NM) = rot_yBrot(3,NM) = rot_z *ENDDO!——————————! 输出平动与转动耦合系数矩阵 !——————————! *PRINT, Btran, Btran.txt *PRINT,Brot,Brot.txtFINISH
系统转动惯量的求解方法
-
采用apdl命令
!——————————! 续:求总质量及质心坐标 !——————————! ! mass_total = 0 sum_mx = 0 sum_my = 0 sum_mz = 0 *DO, i, 1, Num_Element, 1 mass_total = mass_total + Amat2(i, 2) ! 累加总质量 sum_mx = sum_mx + Amat2(i, 2)*Amat2(i, 3) ! 累加 X 坐标的加权值 sum_my = sum_my + Amat2(i, 2)*Amat2(i, 4) ! 累加 Y 坐标的加权值 sum_mz = sum_mz + Amat2(i, 2)*Amat2(i, 5) ! 累加 Z 坐标的加权值 *ENDDO ! 计算质心坐标 centriod_x = sum_mx/mass_total ! 计算质心 X 坐标 centriod_y = sum_my/mass_total ! 计算质心 Y 坐标 centriod_z = sum_mz/mass_total ! 计算质心 Z 坐标 ! 输出 *DMAT, MassCentriod, D, ALLOC, 1,4 MassCentriod(1,1) = mass_total MassCentriod(1,2) = centriod_x MassCentriod(1,3) = centriod_y MassCentriod(1,4) = centriod_z *PRINT, MassCentriod, MassCentriod.txt !——————————! 续:求整个模型所有单元的总转动惯量 !——————————! ! 相对原点 Io_xx = 0 $ Io_yy = 0 $ Io_zz = 0 Io_xy = 0 $ Io_xz = 0 $ Io_yz = 0 *DO, i, 1, Num_Element, 1 mass_e = Amat2(i, 2)cent_x = Amat2(i, 3)cent_y = Amat2(i, 4)cent_z = Amat2(i, 5)Io_xx = Io_xx + mass_e*(cent_y*cent_y+cent_z*cent_z)Io_yy = Io_yy + mass_e*(cent_x*cent_x+cent_z*cent_z)Io_zz = Io_zz + mass_e*(cent_x*cent_x+cent_y*cent_y)Io_xy = Io_xy + mass_e*(cent_x*cent_y)Io_xz = Io_xz + mass_e*(cent_x*cent_z)Io_yz = Io_yz + mass_e*(cent_y*cent_z) *ENDDO ! 相对质心 Ic_xx = 0 $ Ic_yy = 0 $ Ic_zz = 0 Ic_xy = 0 $ Ic_xz = 0 $ Ic_yz = 0 *DO, i, 1, Num_Element, 1 mass_e = Amat2(i, 2)cent_x = Amat2(i, 3) - centriod_xcent_y = Amat2(i, 4) - centriod_ycent_z = Amat2(i, 5) - centriod_zIc_xx = Ic_xx + mass_e*(cent_y*cent_y+cent_z*cent_z)Ic_yy = Ic_yy + mass_e*(cent_x*cent_x+cent_z*cent_z)Ic_zz = Ic_zz + mass_e*(cent_x*cent_x+cent_y*cent_y)Ic_xy = Ic_xy + mass_e*(cent_x*cent_y)Ic_xz = Ic_xz + mass_e*(cent_x*cent_z)Ic_yz = Ic_yz + mass_e*(cent_y*cent_z) *ENDDO ! 输出 *DMAT, Io, D, ALLOC, 3,3 Io(1,1)=Io_xx $ Io(1,2)=-Io_xy $ Io(1,3)=-Io_xz Io(2,1)=-Io_xy $ Io(2,2)=Io_yy $ Io(2,3)=-Io_yz Io(3,1)=-Io_xz $ Io(3,2)=-Io_yz $ Io(3,3)=Io_zz *PRINT, Io, Io.txt *DMAT, Ic, D, ALLOC, 3,3 Ic(1,1)=Ic_xx $ Ic(1,2)=-Ic_xy $ Ic(1,3)=-Ic_xz Ic(2,1)=-Ic_xy $ Ic(2,2)=Ic_yy $ Ic(2,3)=-Ic_yz Ic(3,1)=-Ic_xz $ Ic(3,2)=-Ic_yz $ Ic(3,3)=Ic_zz *PRINT, Ic, Ic.txt
参考文献
[^1]: 卫晓娜,董云峰.基于ANSYS的平动和转动耦合系数矩阵计算[C]//北京力学会,北京振动工程学会.北京力学会第21届学术年会暨北京振动工程学会第22届学术年会论文集.北京航空航天大学宇航学院;,2015:758-760.
[^2]: 郭江.卫星挠性附件平动转动耦合系数的有限元分析[D].南京理工大学,2019.DOI:10.27241/d.cnki.gnjgu.2019.002186.
相关文章:

Ansys 计算刚柔耦合矩阵系数
Ansys 计算刚柔耦合系数矩阵 文章目录 Ansys 计算刚柔耦合系数矩阵卫星的刚柔耦合动力学模型采用 ANSYS 的 APDL 语言的计算方法系统转动惯量的求解方法参考文献 卫星的刚柔耦合动力学模型 柔性航天器的刚柔耦合动力学模型可以表示为 m v ˙ B t r a n η F J ω ˙ ω J…...
)
微服务八股(自用)
微服务 SpringCloud 注册中心:Eureka 负载均衡:Ribbon 远程调用:Feign 服务熔断:Hystrix 网关:Gateway/Zuul Alibaba 配置中心:Nacos 负载均衡:Ribbon 服务调用:Feign 服务…...

指定elf文件dwarf 版本以及查看dwarf版本号
背景: 在实际项目开发过程中,为了让低版本的CANape 工具识别elf 文件,需要在编译elf文件时,指定dwarf的版本。 使用方法: 需要再CMakeLists.txt中指定dwarf 版本 add_compile_options(-g -gdwarf-2) #-gdwarf-4 验…...
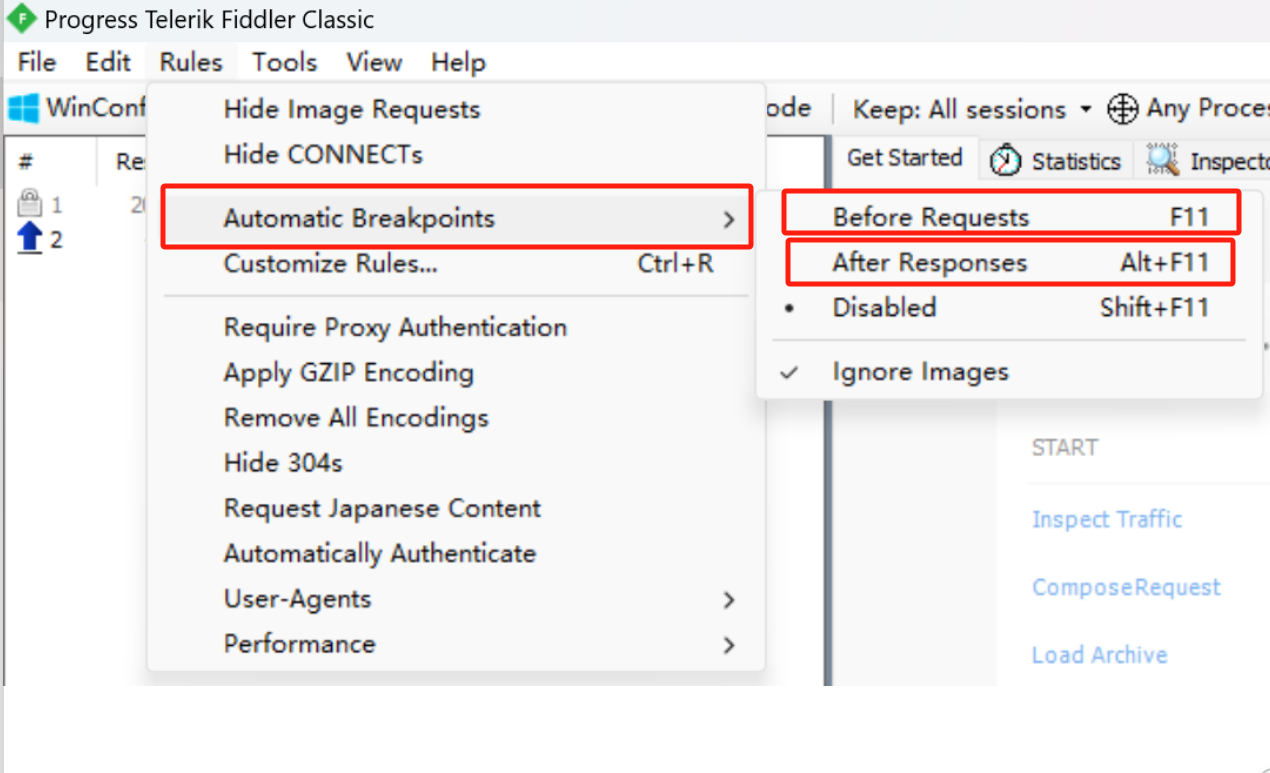
Fidder基本操作
1.抓取https请求 Fidder默认不能抓取https请求,我们必须通过相应的设置才能抓取https请求 1.选择tools下的option 2.选择https选项,并且勾选下面的选项 3.点击Actions导出信任证书到桌面(expert root certificate to desktop) 4.在浏览器中添加对应的证…...
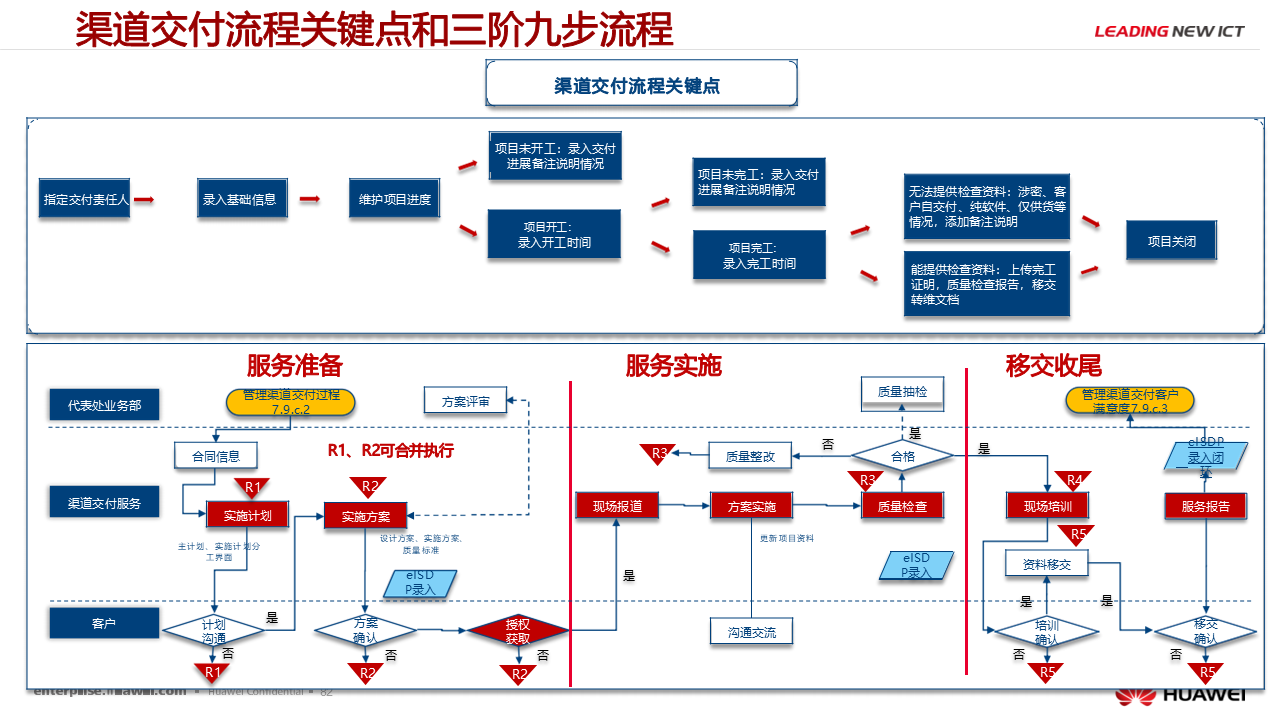
项目管理进阶:精读 78页华为项目管理高级培训教材【附全文阅读】
本文概述了华为项目管理(高级)课程的学习目标及学习方法。学习该课程后,学员应能: 1. **深刻理解项目管理**:掌握项目管理的基本概念与方法,构建项目管理思维框架。 2. **应用IBEST理念**:结合I…...
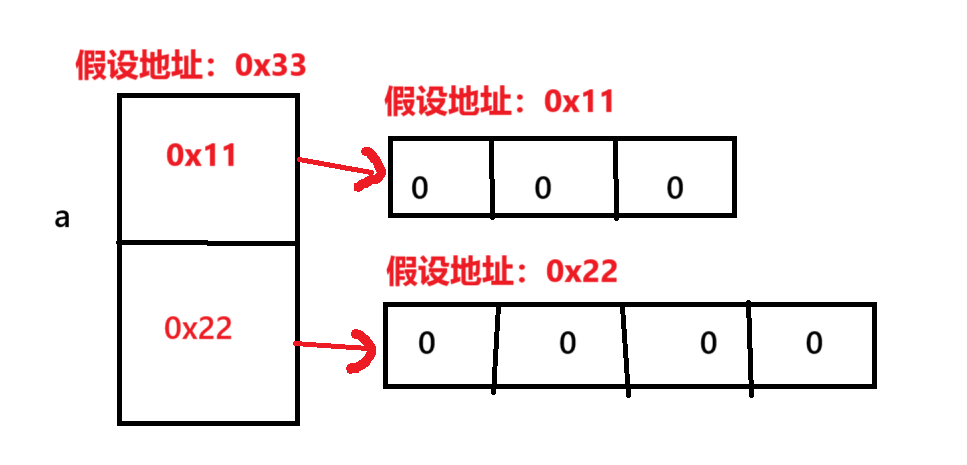
[Java] 方法和数组
目录 1. 方法 1.2 什么是方法 1.2 方法的定义 1.3 方法的调用 1.4 方法的重载 1.5 递归 2. 一维数组 2.1 什么是数组 2.2 数组的创建 2.3 数组的初始化 2.4 遍历数组 2.5 引用数据类型 2.6 关于null 2.7 数组转字符串 2.8 数组元素的查找 2.9 数组的排序 2.10…...

微软家各种copilot的AI产品:Github copilot、Microsoft copilot
背景 大家可能听到很多copilot,比如 Github Copilot,Microsoft Copilot、Microsoft 365 Copilot,有什么区别 Github Copilot:有网页版、有插件(idea、vscode等的插件),都是面向于程序员的。Mi…...
)
KL散度 (Kullback-Leibler Divergence)
KL散度,也称为相对熵 (Relative Entropy),是信息论中一个核心概念,用于衡量两个概率分布之间的差异。给定两个概率分布 P ( x ) P(x) P(x) 和 Q ( x ) Q(x) Q(x)(对于离散随机变量)或 p ( x ) p(x) p(x) 和 q ( x …...

深入解析:java.sql.SQLException: No operations allowed after statement closed 报错
在 Java 应用程序开发过程中,尤其是涉及数据库交互时,开发者常常会遇到各种各样的异常。其中,java.sql.SQLException: No operations allowed after statement closed是一个较为常见且容易令人困惑的错误。本文将深入剖析这一报错,…...

DAY 23 训练
DAY 23 训练 DAY23 机器学习管道 pipeline基础概念转换器(Transformer)估计器(Estimator) 管道(Pipeline)代码演示没有 pipeline 的代码pipeline 的代码教学导入库和数据加载分离特征和标签,划分…...

wordcount程序
### 在 IntelliJ IDEA 中编写和运行 Spark WordCount 程序 要使用 IntelliJ IDEA 编写并运行 Spark 的 WordCount 程序,需按照以下流程逐步完成环境配置、代码编写以及任务提交。 --- #### 1. **安装与配置 IntelliJ IDEA** 确保已正确安装 IntelliJ IDEA&#x…...
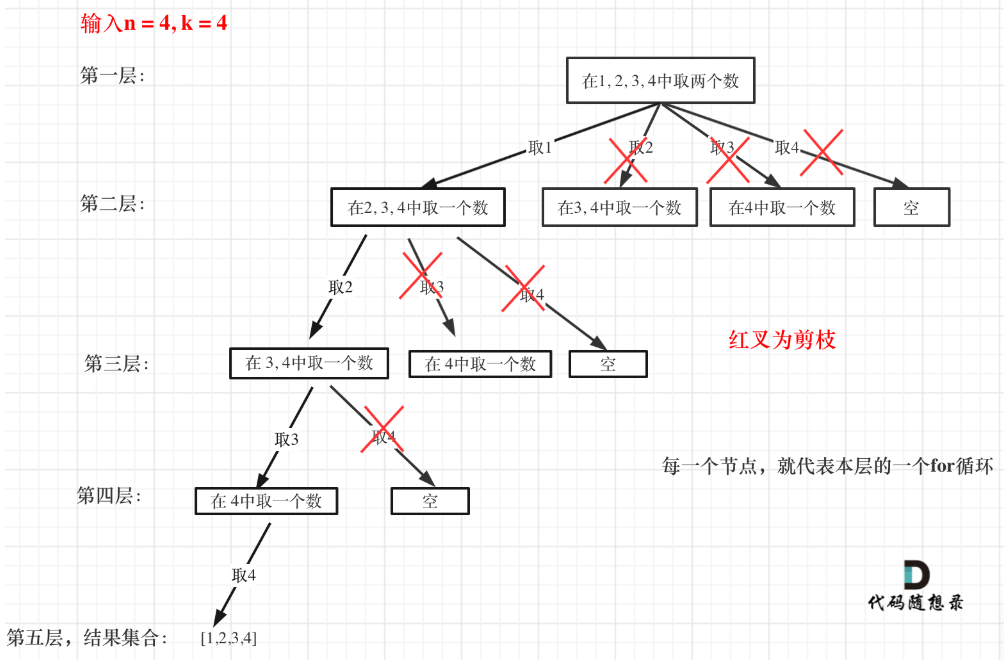
回溯法理论基础 LeetCode 77. 组合 LeetCode 216.组合总和III LeetCode 17.电话号码的字母组合
目录 回溯法理论基础 回溯法 回溯法的效率 用回溯法解决的问题 如何理解回溯法 回溯法模板 LeetCode 77. 组合 回溯算法的剪枝操作 LeetCode 216.组合总和III LeetCode 17.电话号码的字母组合 回溯法理论基础 回溯法 回溯法也可以叫做回溯搜索法,它是一…...
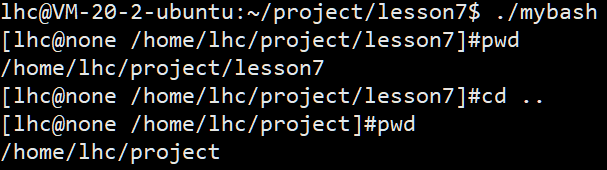
【进程控制二】进程替换和bash解释器
【进程控制二】进程替换 1.exec系列接口2.execl系列2.1execl接口2.2execlp接口2.3execle 3.execv系列3.1execv3.2总结 4.实现一个bash解释器4.1内建命令 通过fork创建的子进程,会继承父进程的代码和数据,因此本质上还是在执行父进程的代码 进程替换可以将…...

线性回归策略
一种基于ATR(平均真实范围)、线性回归和布林带的交易策略。以下是对该策略的全面总结和分析: 交易逻辑思路 1. 过滤条件: - 集合竞价过滤:在每个交易日的开盘阶段,过滤掉集合竞价产生的异常数据。 - 价格异常过滤:排除当天开盘价与最高价或最低价相同的情况,这…...

Linux下的c/c++开发之操作Redis数据库
C/C 操作 Redis 的常用库 在 C/C 开发中操作 Redis 有多种方式,最主流的选择是使用第三方客户端库。由于 Redis 官方本身是使用 C 编写的,提供的 API 非常适合 C/C 调用。常见的 Redis C/C 客户端库包括: hiredis:官方推荐的轻量…...

Bitmap、Roaring Bitmap、HyperLogLog对比介绍
一、Bitmap(位图)概述 Bitmap 是一种用位(bit)来表示集合元素是否存在的数据结构。每个位代表一个元素的状态(0或1),非常节省空间且支持快速集合操作。 常见Bitmap类型: 普通Bitmap 最简单的位数组,适合元素范围固定且不稀疏的场景。例如,元素范围是0~1000,用1001…...
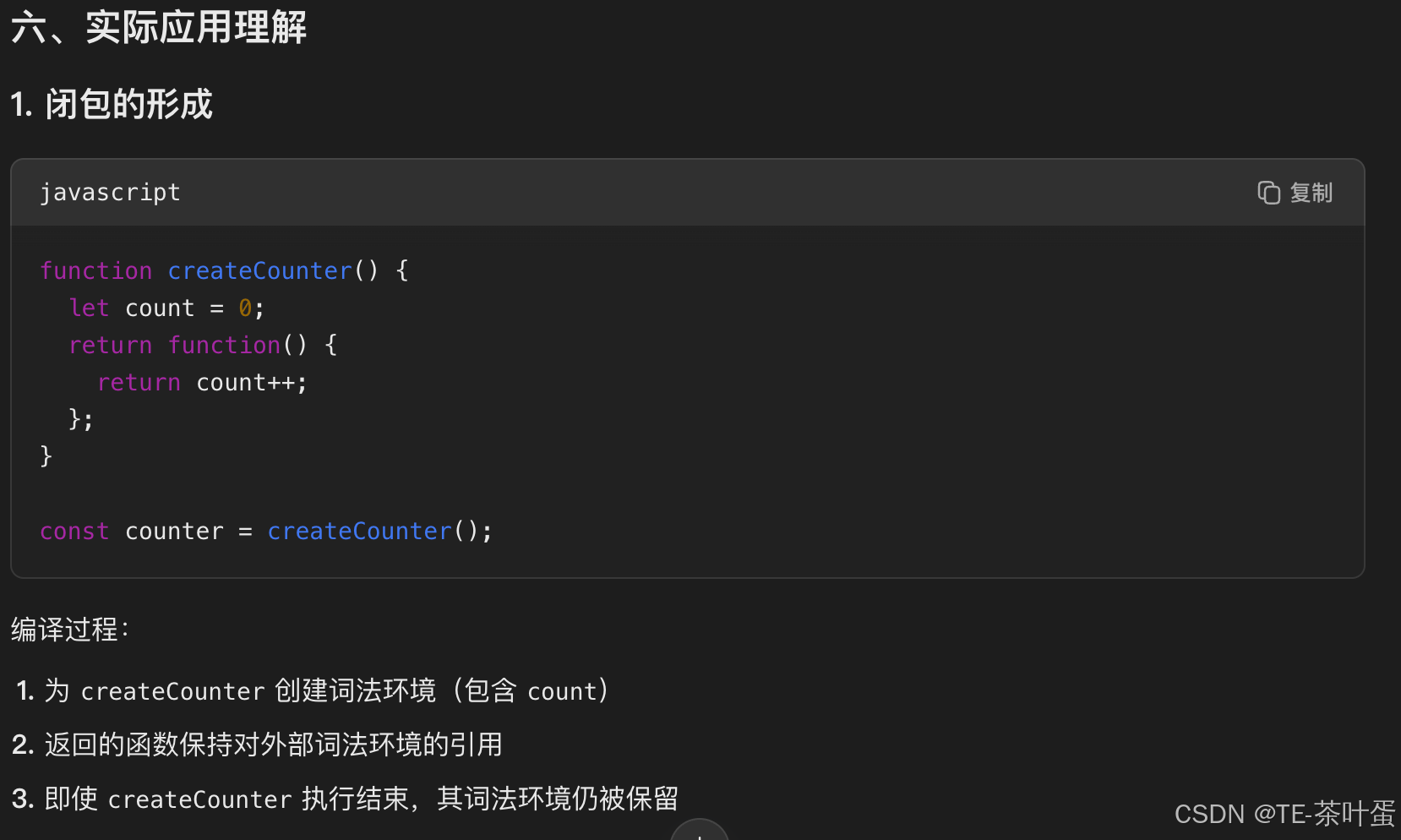
JavaScript 的编译与执行原理
文章目录 前言🧠 一、JavaScript 编译与执行过程1. 编译阶段(发生在代码执行前)✅ 1.1 词法分析(Lexical Analysis)✅ 1.2 语法分析(Parsing)✅ 1.3 语义分析与生成执行上下文 🧰 二…...

fastapi项目中数据流转架构设计规范
一、数据库层设计 1.1 ORM模型定义 class SysUser(Base):__table_args__ {"mysql_engine": "InnoDB","comment": "用户表"}id: Mapped[int] mapped_column(Integer, primary_keyTrue, autoincrementTrue, comment"用户ID&quo…...
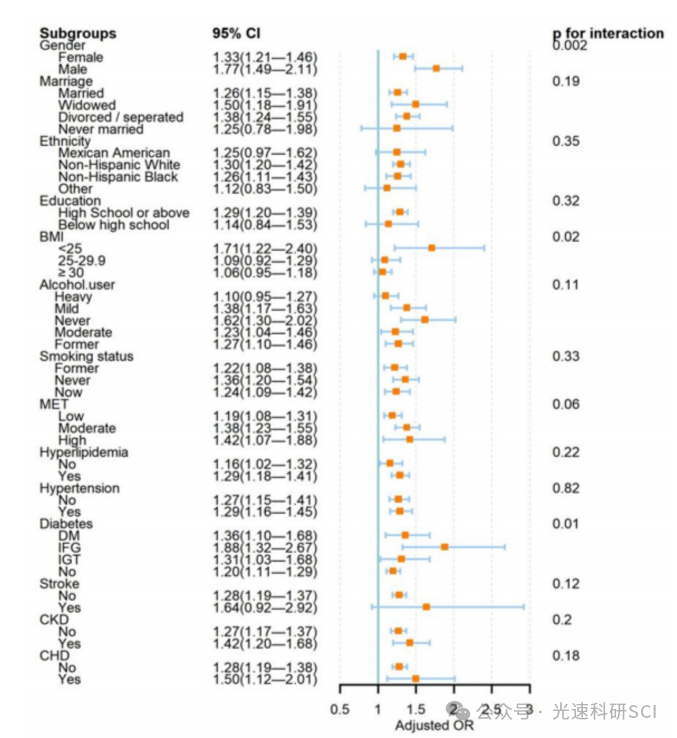
NHANES指标推荐:FMI
文章题目:Exploring the relationship between fat mass index and metabolic syndrome among cancer patients in the U.S: An NHANES analysis DOI:10.1038/s41598-025-90792-9 中文标题:探索美国癌症患者脂肪量指数与代谢综合征之间的关系…...
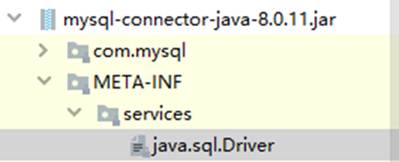
【JDBC】JDBC常见错误处理方法及驱动的加载
MySQL8中数据库连接的四个参数有两个发生了变化 String driver "com.mysql.cj.jdbc.Driver"; String url "jdbc:mysql://127.0.0.1:3306/mydb?useSSLfalse&useUnicodetrue&characterEncodingutf8&serverTimezoneAsia/Shanghai"; 或者Strin…...

React中useState中更新是同步的还是异步的?
文章目录 前言一、useState 的基本用法二、useState 的更新机制1. 内部状态管理2. 状态初始化3. 状态更新 三、useState 的更新频率与异步行为1. 异步更新与批量更新2. 为什么需要异步更新? 四、如何正确处理 useState 的更新1. 使用回调函数形式的更新2. 理解异步更…...

Vim编辑器命令模式操作指南
Vim 的命令模式(即 Normal 模式)是 Vim 的核心操作模式,用于执行文本编辑、导航、搜索、保存等操作。以下是命令模式下的常用操作总结: 1. 模式切换 进入命令模式:在任何模式下按 Esc 键(可能需要多次按&a…...
车载以太网驱动智能化:域控架构设计与开发实践
title: 车载以太网驱动专用车智能化:域控架构设计与开发实践 date: 2023-12-01 categories: 新能源汽车 tags: [车载以太网, 电子电气架构, 域控架构, 专用车智能化, SOME/IP, AUTOSAR] 引言:专用车智能化转型的挑战与机遇 专用车作为城市建设与工业运输…...
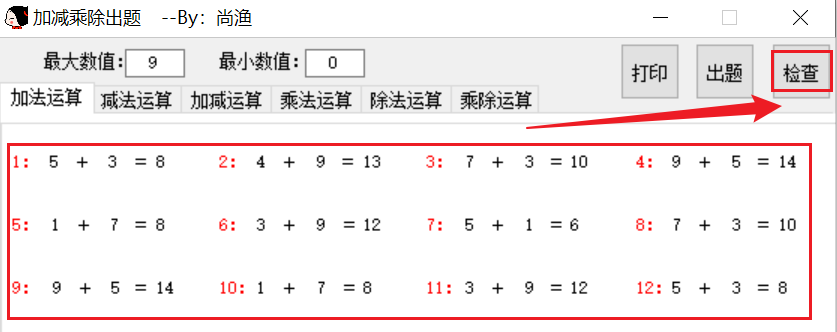
如何利用技术手段提升小学数学练习效率
在日常辅导孩子数学作业的过程中,我发现了一款比较实用的练习题生成工具。这个工具的安装包仅1.8MB大小,但基本能满足小学阶段的数学练习需求。 主要功能特点: 参数化出题 可自由设置数字范围(如10以内、100以内) 支…...

C# DataGrid功能总览
目录 前言一、DataGrid基础功能1.DataGrid基础属性2.DataGridTextColumn属性3.DataGridTemplateColumn属性4.表DataGrid点击单元格或行时弹出两个按钮 二、其他功能1.表行DataGrid出现斑马纹效果2.表行DataGrid字体、行背景标红 前言 最近所实现的功能里,表DataGri…...
BGP路由策略 基础实验
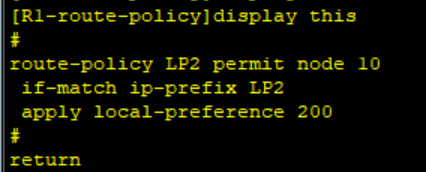
要求: 1.使用Preva1策略,确保R4通过R2到达192.168.10.0/24 2.用AS_Path策略,确保R4通过R3到达192.168.11.0/24 3.配置MED策略,确保R4通过R3到达192.168.12.0/24 4.使用Local Preference策略,确保R1通过R2到达192.168.1.0/24 …...
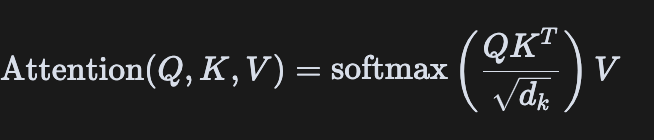
第9讲、深入理解Scaled Dot-Product Attention
Scaled Dot-Product Attention是Transformer架构的核心组件,也是现代深度学习中最重要的注意力机制之一。本文将从原理、实现和应用三个方面深入剖析这一机制。 1. 基本原理 Scaled Dot-Product Attention的本质是一种加权求和机制,通过计算查询(Query…...

2025B难题练习
1.启动多任务排序 拓扑排序 每次选入度为0的点 对每次选的点进行排序 package mainimport ("bufio""fmt""os""slices""strings" )func main() {scanner : bufio.NewScanner(os.Stdin)scanner.Scan()text : scanner.Text()…...
双向长短期记忆网络-BiLSTM
5月14日复盘 二、BiLSTM 1. 概述 双向长短期记忆网络(Bi-directional Long Short-Term Memory,BiLSTM)是一种扩展自长短期记忆网络(LSTM)的结构,旨在解决传统 LSTM 模型只能考虑到过去信息的问题。BiLST…...
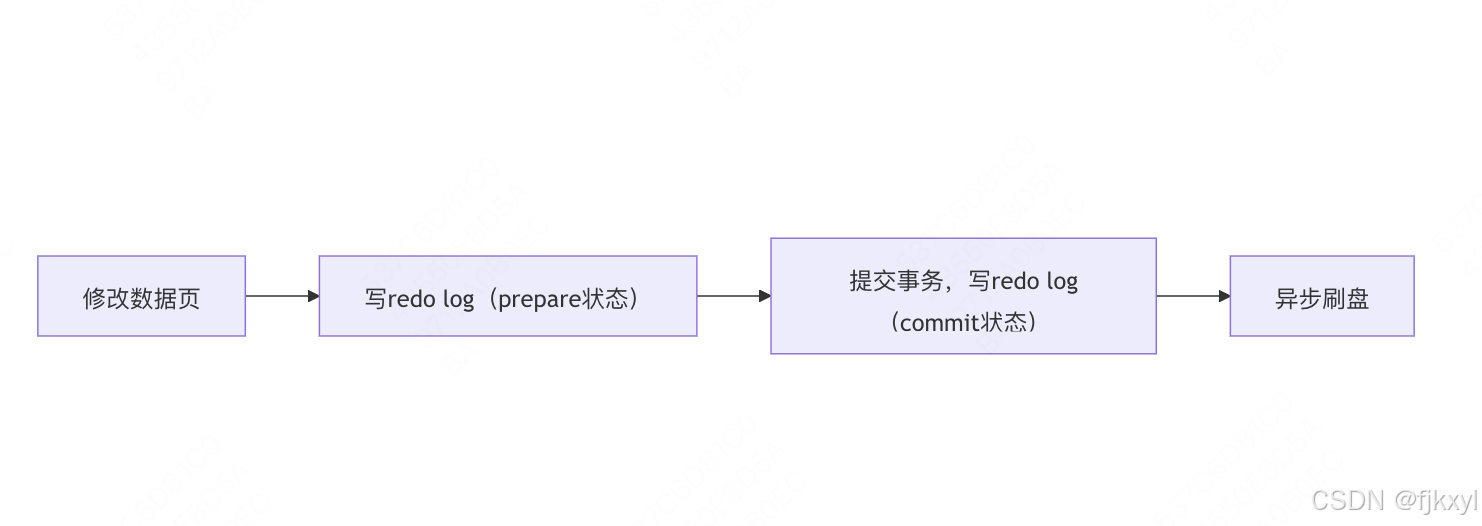
MySQL UPDATE 执行流程全解析
引言 当你在 MySQL 中执行一条 UPDATE 语句时,背后隐藏着一套精密的协作机制。从解析器到存储引擎,从锁管理到 WAL 日志,每个环节都直接影响数据一致性和性能。 本文将通过 Mermaid 流程图 和 时序图,完整还原 UPDATE 语句的执行…...