Apollo10.0学习——planning模块(9)之参数详解一
planning.conf
--flagfile=modules/common/data/global_flagfile.txt # 加载全局通用配置,包含基础运行参数
--traffic_rule_config_filename=modules/planning/planning_component/conf/traffic_rule_config.pb.txt # 交通规则配置文件,定义信号灯、停车标志等处理逻辑
--planning_upper_speed_limit=20.00 # 巡航最大速度 m/s 约72 km/h
--default_cruise_speed=11.18 # m默认参数 默认巡航速度 m/s 约40 km/h
--ignore_overlapped_obstacle=true # 忽略与自车路径重叠的障碍物(如误检的静态障碍物)
--prioritize_change_lane # 优先执行变道操作,减少路径绕行
--min_length_for_lane_change=5.0 # 执行变道所需的最小前方直道长度
--nouse_multi_thread_to_add_obstacles # 禁用多线程添加障碍物(调试或低资源环境使用)
# --min_past_history_points_len=10
--enable_print_curve=true # 输出路径/速度曲线调试信息
--destination_check_distance=4.0 # 触发终点停车准备的距离阈值
# --smoother_config_filename=modules/planning/planning_component/conf/spiral_smoother_config.pb.txt
# --smoother_config_filename=modules/planning/planning_component/conf/qp_spline_smoother_config.pb.txt
--smoother_config_filename=modules/planning/planning_component/conf/discrete_points_smoother_config.pb.txt # 使用离散点平滑器(替代QP样条/螺旋线平滑器)
--enable_reference_line_stitching=false # 关闭参考线缝合功能(可能导致路径不连续)
# --speed_bump_speed_limit=3 # 通过减速带时的最大速度(默认禁用)
# --parking_inwards=false # 控制泊车方向(是否倒车入库)
# --use_dual_variable_warm_start=true
# --enable_record_debug=true # 记录调试数据
# --enable_parallel_hybrid_a=true
--export_chart=true # 生成可视化图表(用于分析规划结果)
# --use_front_axe_center_in_path_planning=true # 路径规划基准点使用前轴中心
--enable_smoother_failsafe # 启用平滑器故障保护机制(计算失败时回退到安全路径)
--enable_parallel_trajectory_smoothing # 并行处理轨迹平滑以提高效率
--nouse_s_curve_speed_smooth # 禁用S曲线速度平滑(改用线性或其他策略)
--use_iterative_anchoring_smoother # 使用迭代锚点平滑器优化路径
--nonstatic_obstacle_nudge_l_buffer=0.4 # 动态障碍物横向避让缓冲距离
--use_st_drivable_boundary=false
--enable_pull_over_at_destination=false # 禁用到达终点后自动靠边停车
全局配置
| 参数 | 类型 | 说明 |
|---|---|---|
--flagfile=modules/common/data/global_flagfile.txt | 文件路径 | 加载全局通用配置,包含基础运行参数 |
交通规则配置
| 参数 | 类型 | 说明 |
|---|---|---|
--traffic_rule_config_filename=modules/planning/.../traffic_rule_config.pb.txt | 文件路径 | 交通规则配置文件,定义信号灯、停车标志等处理逻辑 |
速度控制
| 参数 | 类型 | 默认值 | 说明 |
|---|---|---|---|
--planning_upper_speed_limit | 浮点数(m/s) | 20.00 | 巡航时允许的最大速度(约72 km/h) |
--default_cruise_speed | 浮点数(m/s) | 11.18 | 默认巡航速度(约40 km/h) |
# --speed_bump_speed_limit | 浮点数(m/s) | 3.0 | 通过减速带时的最大速度(默认禁用) |
车道变更策略
| 参数 | 类型 | 默认值 | 说明 |
|---|---|---|---|
--prioritize_change_lane | 布尔值 | - | 优先执行变道操作,减少路径绕行 |
--min_length_for_lane_change | 浮点数(米) | 5.0 | 执行变道所需的最小前方直道长度 |
障碍物处理
| 参数 | 类型 | 默认值 | 说明 |
|---|---|---|---|
--ignore_overlapped_obstacle | 布尔值 | true | 忽略与自车路径重叠的障碍物(如误检的静态障碍物) |
--nonstatic_obstacle_nudge_l_buffer | 浮点数(米) | 0.4 | 动态障碍物横向避让缓冲距离 |
路径平滑与优化
| 参数 | 类型 | 默认值 | 说明 |
|---|---|---|---|
--smoother_config_filename=.../discrete_points_smoother_config.pb.txt | 文件路径 | - | 使用离散点平滑器(替代QP样条/螺旋线平滑器) |
--enable_smoother_failsafe | 布尔值 | - | 启用平滑器故障保护机制(计算失败时回退到安全路径) |
--enable_parallel_trajectory_smoothing | 布尔值 | - | 并行处理轨迹平滑以提高效率 |
--nouse_s_curve_speed_smooth | 布尔值 | - | 禁用S曲线速度平滑(改用线性或其他策略) |
--use_iterative_anchoring_smoother | 布尔值 | - | 使用迭代锚点平滑器优化路径 |
参考线与多线程
| 参数 | 类型 | 默认值 | 说明 |
|---|---|---|---|
--enable_reference_line_stitching | 布尔值 | false | 关闭参考线缝合功能(可能导致路径不连续) |
--nouse_multi_thread_to_add_obstacles | 布尔值 | - | 禁用多线程添加障碍物(调试或低资源环境使用) |
调试与日志
| 参数 | 类型 | 默认值 | 说明 |
|---|---|---|---|
--enable_print_curve | 布尔值 | true | 输出路径/速度曲线调试信息 |
--export_chart | 布尔值 | true | 生成可视化图表(用于分析规划结果) |
目的地与停车
| 参数 | 类型 | 默认值 | 说明 |
|---|---|---|---|
--destination_check_distance | 浮点数(米) | 4.0 | 触发终点停车准备的距离阈值 |
--enable_pull_over_at_destination | 布尔值 | false | 禁用到达终点后自动靠边停车 |
未被启用的参数(注释项)
| 参数 | 功能推测 |
|---|---|
# --parking_inwards=false | 控制泊车方向(是否倒车入库) |
# --enable_record_debug=true | 记录调试数据 |
# --use_front_axe_center_in_path_planning | 路径规划基准点使用前轴中心 |
参数配置指南
-
性能调优
- 提升实时性:启用
--enable_parallel_trajectory_smoothing - 降低CPU负载:禁用多线程 (
--nouse_multi_thread_to_add_obstacles)
- 提升实时性:启用
-
安全调整
- 复杂道路:增大
--nonstatic_obstacle_nudge_l_buffer到 0.6 - 拥堵场景:降低
--planning_upper_speed_limit至 15 m/s
- 复杂道路:增大
-
调试建议
- 路径异常时:启用
--enable_print_curve分析曲线 - 避障失败时:检查
--ignore_overlapped_obstacle是否为 true
- 路径异常时:启用
global_flagfile.txt
# 车辆动态参数配置文件
--vehicle_config_path=modules/common/data/vehicle_param.pb.txt--log_dir=data/log
# 导航模式开关 - true:依赖实时路况动态生成参考线(需联网)- false:使用预加载的高精地图固定路径
--use_navigation_mode=false
# 高精地图加载路径
--map_dir=modules/map/data/sunnyvale_loop
# 仿真时间开关 - true:使用 Gazebo/Carla 等仿真器的时间戳 - false:使用物理机/车载计算机的实时时钟
--use_sim_time=false
# Cyber RT 时间同步 - 启用 Cyber RT 框架的全局时钟管理 - 依赖 Clock 模块确保多节点时间一致性
--use_cyber_time=true--map_dir=modules/map/data/sunnyvale--map_dir=modules/map/data/sunnyvale_big_loop核心路径配置
| 参数 | 类型 | 默认值 | 功能说明 |
|---|---|---|---|
--vehicle_config_path =modules/common/data/vehicle_param.pb.txt | 文件路径 | 必填项 | 车辆动态参数配置文件 - 包含轴距、轮距、转向比、最大加速度等关键参数 - 示例字段: wheel_base(轴距)、max_steer_angle(最大转向角)- 错误配置会导致控制失效(如转向不足) |
--log_dir =data/log | 目录路径 | 可选 | 日志存储路径 - 保存 Planning/Control 模块的运行时日志、轨迹数据 - 默认路径: /apollo/data/log/ |
地图配置
| 参数 | 类型 | 典型值 | 功能说明 |
|---|---|---|---|
--map_dir =modules/map/data/sunnyvale_loop | 目录路径 | 需指定 | 高精地图加载路径 - sunnyvale_loop:Apollo 默认测试环形道路(约 2km)- sunnyvale_big_loop:扩展版环线(覆盖更多复杂场景)- 注意:多 map_dir 参数同时存在时,后者会覆盖前者 |
--use_navigation_mode =false | 布尔值 | false | 导航模式开关 - true:依赖实时路况动态生成参考线(需联网)- false:使用预加载的高精地图固定路径 |
时间同步配置
| 参数 | 类型 | 默认值 | 功能说明 |
|---|---|---|---|
--use_sim_time =false | 布尔值 | false | 仿真时间开关 - true:使用 Gazebo/Carla 等仿真器的时间戳 - false:使用物理机/车载计算机的实时时钟 |
--use_cyber_time =true | 布尔值 | true | Cyber RT 时间同步 - 启用 Cyber RT 框架的全局时钟管理 - 依赖 Clock 模块确保多节点时间一致性 |
配置注意事项
-
车辆参数
- 关键性:直接影响动力学模型,错误配置可能导致翻车风险(如
max_steer_angle过大)。 - 修改建议:更换车型时需重新测量参数并生成
.pb.txt文件。
- 关键性:直接影响动力学模型,错误配置可能导致翻车风险(如
-
地图冲突处理
- 覆盖机制:若同时设置多个
map_dir,系统以最后一个为准。 - 典型错误示例:
--map_dir=modules/map/data/sunnyvale_loop # 被覆盖 --map_dir=modules/map/data/sunnyvale_big_loop # 实际生效
- 覆盖机制:若同时设置多个
-
时间模式互斥
- 规则:
use_sim_time与物理机时钟互斥,开启仿真时必须设为true。 - 典型场景:硬件在环(HIL)测试时需启用
use_sim_time=true。
- 规则:
调试建议
- 日志分析:通过
less data/log/planning.INFO查看规划模块警告(如VehicleParam not found)。 - 地图验证:使用
cyber_monitor检查/apollo/map频道是否正常发布数据。 - 时间同步检查:在
Cyber RT终端执行clock命令验证时间源(显示CYBER_TIME或SYSTEM_TIME)。
vehicle_param.pb.txt
vehicle_param {brand: LINCOLN_MKZ # 车辆品牌标识,关联默认动力学模型vehicle_id {other_unique_id: "mkz" # 车辆唯一标识符,用于多车协同场景}front_edge_to_center: 3.89 # 前保险杠到车辆中心的纵向距离(影响前向碰撞检测)back_edge_to_center: 1.043 # 后保险杠到车辆中心的纵向距离(计算总长:3.89+1.043=4.933)left_edge_to_center: 1.055 # 左侧车身到中心的横向距离(确定车辆宽度边界)right_edge_to_center: 1.055 # 右侧车身到中心的横向距离(总宽度 = 1.055*2=2.11)length: 4.933 # 车辆总长度(前后保险杠间距)width: 2.11 # 车辆总宽度(含后视镜展开状态)height: 1.48 # 车辆高度(用于限高区域规划)min_turn_radius: 5.05386147161 # 最小转弯半径(公式:轴距/(sin(最大转向角)))max_acceleration: 2.0 # 最大加速度(影响超车、汇入车流策略)max_deceleration: -6.0 # 最大减速度(紧急制动能力,负值表示减速)max_steer_angle: 8.20304748437 # 方向盘最大转向角(左右极限位置对应的角度) 度max_steer_angle_rate: 6.98131700798 # 转向角最大变化率(决定转向灵敏度)steer_ratio: 16 # 转向传动比(方向盘转1度对应车轮转向 1/16 度)wheel_base: 2.8448 # 轴距(前轮到后轮中心的距离,影响转弯稳定性)wheel_rolling_radius: 0.335 # 车轮滚动半径(用于速度计算:车速 = 轮速 × 半径)max_abs_speed_when_stopped: 0.2 # 静止判定阈值(速度低于此值视为停车状态)brake_deadzone: 14.5 # 刹车信号死区(抑制微小踏板抖动导致的误制动)throttle_deadzone: 15.7 # 油门信号死区(过滤噪音信号,提升控制平滑性)
}
车辆基础参数
| 参数 | 类型 | 示例值 | 单位 | 说明 |
|---|---|---|---|---|
brand | 枚举值 | LINCOLN_MKZ | - | 车辆品牌标识,关联默认动力学模型 |
vehicle_id.other_unique_id | 字符串 | "mkz" | - | 车辆唯一标识符,用于多车协同场景 |
几何尺寸参数
| 参数 | 类型 | 示例值 | 单位 | 说明 |
|---|---|---|---|---|
front_edge_to_center | 浮点数 | 3.89 | 米 | 前保险杠到车辆中心的纵向距离(影响前向碰撞检测) |
back_edge_to_center | 浮点数 | 1.043 | 米 | 后保险杠到车辆中心的纵向距离(计算总长:3.89+1.043=4.933) |
left_edge_to_center | 浮点数 | 1.055 | 米 | 左侧车身到中心的横向距离(确定车辆宽度边界) |
right_edge_to_center | 浮点数 | 1.055 | 米 | 右侧车身到中心的横向距离(总宽度 = 1.055*2=2.11) |
length | 浮点数 | 4.933 | 米 | 车辆总长度(前后保险杠间距) |
width | 浮点数 | 2.11 | 米 | 车辆总宽度(含后视镜展开状态) |
height | 浮点数 | 1.48 | 米 | 车辆高度(用于限高区域规划) |
动力学参数
| 参数 | 类型 | 示例值 | 单位 | 说明 |
|---|---|---|---|---|
min_turn_radius | 浮点数 | 5.054 | 米 | 最小转弯半径(公式: 轴距 / ( sin ( 最大转向角 ) ) \text{轴距}/(\sin(\text{最大转向角})) 轴距/(sin(最大转向角))) |
max_acceleration | 浮点数 | 2.0 | m/s² | 最大加速度(影响超车、汇入车流策略) |
max_deceleration | 浮点数 | -6.0 | m/s² | 最大减速度(紧急制动能力,负值表示减速) |
转向系统参数
| 参数 | 类型 | 示例值 | 单位 | 说明 |
|---|---|---|---|---|
max_steer_angle | 浮点数 | 8.203 | 度 | 方向盘最大转向角(左右极限位置对应的角度) |
max_steer_angle_rate | 浮点数 | 6.981 | 度/秒 | 转向角最大变化率(决定转向灵敏度) |
steer_ratio | 整数 | 16 | - | 转向传动比(方向盘转1度对应车轮转向 1 16 \frac{1}{16} 161 度) |
底盘与传动参数
| 参数 | 类型 | 示例值 | 单位 | 说明 |
|---|---|---|---|---|
wheel_base | 浮点数 | 2.8448 | 米 | 轴距(前轮到后轮中心的距离,影响转弯稳定性) |
wheel_rolling_radius | 浮点数 | 0.335 | 米 | 车轮滚动半径(用于速度计算:车速 = 轮速 × 半径) |
max_abs_speed_when_stopped | 浮点数 | 0.2 | m/s | 静止判定阈值(速度低于此值视为停车状态) |
控制死区参数
| 参数 | 类型 | 示例值 | 单位 | 说明 |
|---|---|---|---|---|
brake_deadzone | 浮点数 | 14.5 | % | 刹车信号死区(抑制微小踏板抖动导致的误制动) |
throttle_deadzone | 浮点数 | 15.7 | % | 油门信号死区(过滤噪音信号,提升控制平滑性) |
参数应用场景
-
路径规划
min_turn_radius限制路径曲率,确保车辆可执行生成的轨迹。front/back_edge_to_center用于计算车身包络线,避免碰撞。
-
控制模块
steer_ratio和max_steer_angle_rate决定转向响应速度。max_acceleration/deceleration约束速度规划器的输出范围。
-
感知融合
length/width用于目标匹配,区分车辆与其他障碍物。
参数校验公式
-
总长度校验
length= front_edge_to_center + back_edge_to_center4.933 = 3.89 + 1.043 4.933 = 3.89 + 1.043 4.933=3.89+1.043
-
最小转弯半径计算
min_turn_radius = wheel_base /sin( max_steer_angle)
5.054 ≈ 2.8448 sin ( 8.203 ∘ ) 5.054 \approx \frac{2.8448}{\sin(8.203^\circ)} 5.054≈sin(8.203∘)2.8448
相关文章:
之参数详解一)
Apollo10.0学习——planning模块(9)之参数详解一
planning.conf --flagfilemodules/common/data/global_flagfile.txt # 加载全局通用配置,包含基础运行参数 --traffic_rule_config_filenamemodules/planning/planning_component/conf/traffic_rule_config.pb.txt # 交通规则配置文件,定义信号灯、停车…...
)
Python-多进程编程 (multiprocessing 模块)
目录 一、创建进程1. Process 的语法结构2. 进程不共享全局变量 二、进程间通信1. 队列通信2. 管道通信 三、进程池1. 常用函数2. 进程池中的 Queue 四、应用:复制文件夹(多进程版)五、守护进程和进程同步六、注意事项 通过使用 multiprocess…...

GraphQL在.NET 8中的全面实践指南
一、GraphQL与.NET 8概述 GraphQL是一种由Facebook开发的API查询语言,它提供了一种更高效、更灵活的替代REST的方案。与REST不同,GraphQL允许客户端精确指定需要的数据结构和字段,避免了"过度获取"或"不足获取"的问题。…...

在mobaxterm下面执行shell脚本报错
关键步骤:在 MobaXterm 的 SSH 会话中强制指定 Bash 解释器 若你曾通过 高级 SSH 设置中的「执行命令」 填写 /bin/bash 解决脚本问题,以下是具体操作和原理说明: 1. 设置位置 打开 MobaXterm,选择需要配置的 SSH 会话࿰…...

系统集成项目管理工程师学习笔记之启动过程组
第十章 启动过程组 制定项目章程 定义 制定项目章程是编写一份正式批准项目并授权项目经理在项目活动中使用组织资源的文件的过程。 正式批准的项目文件 作用 1、明确项目与组织战略目标之间的直接联系 2、确立项目的正式地位 3、展示组织对项目的承诺 本过程仅开展一…...
)
OceanBase数据库全面指南(数据操作篇DML)
文章目录 一、OceanBase插入数据全指南1.1 INSERT语句基础用法1.2 高级INSERT用法1.2.1 插入查询结果1.2.2 多表插入1.2.3 条件插入1.3 INSERT性能优化技巧1.3.1 批量插入优化1.3.2 使用APPEND提示1.3.3 并行插入二、OceanBase批量插入优化2.1 多行插入语法详解2.2 批量绑定技术…...

深入解析AI中的Prompt工程:从理论到实践
目录 引言:Prompt在AI中的核心地位 第一部分:Prompt基础理论 1.1 什么是Prompt 1.2 ICIO框架:Prompt设计的结构化方法 1.3 为什么需要Prompt 1.4 Prompt的终极价值 第二部分:Prompt工程实践 2.1 Prompt工程概述 2.2 Prompt工程的具体内容 2.3 Prompt Engineer的工…...
软考中级软件设计师——设计模式篇
一、设计模式核心分类 设计模式分为 3 大类,共 23 种模式(考试常考约 10-15 种): 分类核心模式考试重点创建型模式工厂方法、抽象工厂、单例、生成器、原型单例模式的实现(懒汉、饿汉)、工厂模式的应用场…...

matlab二维随机海面模拟
二维随机海面模拟是一种重要的技术,广泛应用于海洋工程、船舶设计、雷达系统和光学通信等领域。利用蒙特卡罗方法结合二维海浪功率谱模型,可以生成符合实际海面特性的随机表面。 步骤 1: 定义海浪功率谱模型 海浪功率谱模型描述了海浪能量在不同频率和…...
Axure系统原型设计列表版方案
列表页面是众多系统的核心组成部分,承担着数据呈现与基础交互的重要任务。一个优秀的列表版设计,能够极大提升用户获取信息的效率,优化操作体验。下面,我们将结合一系列精心设计的列表版方案图片,深入探讨如何打造出实…...
微软全新开源命令行文本编辑器:Edit — 致敬经典,拥抱现代
名人说:博观而约取,厚积而薄发。——苏轼《稼说送张琥》 创作者:Code_流苏(CSDN)(一个喜欢古诗词和编程的Coder😊) 目录 一、引言:命令行的新利器二、Edit:致敬经典,拥抱现代1. 命令行的“新升级”2. 为什么要有 Edit?三、核心功能与特性一览1. 完全开源、MIT 许可证…...
年会招标抽奖活动软件———仙盟创梦IDE
年会是企业一年的总结与欢庆时刻,而抽奖环节更是点燃全场气氛的关键。如何让抽奖环节既大气又充满仪式感?选对抽奖软件至关重要!本文精心挑选了 3 款兼具实用性与氛围感的年会抽奖软件,从界面设计到功能特色,全方位为你…...
智防火灾,慧控能耗:物联网赋能金融行业电气安全革新
摘要 随着金融行业对电气安全需求的不断提升,传统用电管理模式已难以满足现代金融机构对火灾防控、能耗管理和智能运维的要求。本文基于物联网、云计算及大数据分析技术,提出一套针对金融行业的安全用电解决方案。该方案通过智能化硬件部署与平台化管理…...
)
Any类(C++17类型擦除,也称上帝类)
Any类(C17类型擦除,也称上帝类) 在C中,std::any 是C17标准引入的一个灵活的类型安全容器,用于存储任意类型的单个值。 1. std::any 的核心特性 类型安全:存储的值必须通过明确的类型转换(any_…...

jquery.table2excel方法导出
jquery提供了一个table2excel方法可以用来导出页面到xls等 $("#grid_595607").table2excel({exclude: ".noExport", // 排除类名为 noExport 的元素filename: "导出数据.xls",exclude_img: true, // 不导出图片exclude_links: true, // 不导…...

Spring Boot 多租户架构实现:基于上下文自动传递的独立资源隔离方案
一、核心设计思想 通过线程上下文自动传递租户ID,结合动态数据源路由和中间件连接工厂,实现MySQL、Redis、RocketMQ的完全自动化资源隔离。关键设计如下: #mermaid-svg-ZjXCGSWoCuNFMIch {font-family:"trebuchet ms",verdana,aria…...
在 JavaScript 中正确使用 Elasticsearch,第二部分
作者:来自 Elastic Jeffrey Rengifo 回顾生产环境中的最佳实践,并讲解如何在无服务器环境中运行 Elasticsearch Node.js 客户端。 想获得 Elastic 认证?查看下一期 Elasticsearch Engineer 培训的时间! Elasticsearch 拥有大量新…...
更新nvidia-container-toolkit 1.17.7-1后,运行--gpus all 卡死问题
用Arch每日一滚,结果今天用 sudo docker run -it --runtimenvidia --gpus all居然卡死了,排雷排了几小时,才从开源库发现问题 nvidia-container-toolkit 1.17.7-1 是有问题的,而且在ubuntu和arch上都存在问题。 只好Downgrade 1.…...

【Nginx学习笔记】:Fastapi服务部署单机Nginx配置说明
服务部署单机Nginx配置说明 服务.conf配置文件: upstream asr_backend {server 127.0.0.1:8010; }server {listen 80;server_name your_domain.com;location / {proxy_pass http://localhost:8000;proxy_set_header Host $host;proxy_set_header X-Real-IP $remot…...

相机标定与图像处理涉及的核心坐标系
坐标系相互关系 #mermaid-svg-QxaMjIcgWVap0awV {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg-QxaMjIcgWVap0awV .error-icon{fill:#552222;}#mermaid-svg-QxaMjIcgWVap0awV .error-text{fill:#552222;stroke:#552…...
是处理 HTTP 请求的核心组件)
在 ASP.NET 中,HTTP 处理程序(HttpHandler)是处理 HTTP 请求的核心组件
ASP.NET 中 HttpHandler 的用法详解 在 ASP.NET 中,HTTP 处理程序(HttpHandler)是处理 HTTP 请求的核心组件。根据你的配置文件,我将详细解释 <handlers> 节点的各种用法和配置选项。 1. HttpHandler 概述 HttpHandler 是…...
通义灵码 2.5 版深度评测:智能编程的边界在哪里?
通义灵码 2.5 版深度评测:智能编程的边界在哪里? 评测目标 全面测试智能体模式:是否真正具备自主决策能力?MCP 工具集成体验:能否提升开发效率?AI 记忆自感知能力:是否能真正理解开发者习惯&a…...

电商项目-商品微服务-规格参数管理,分类与品牌管理需求分析
本文章介绍:规格参数管理与分类与品牌管理的需求分析和表结构的设计。 一、规格参数管理 规格参数模板是用于管理规格参数的单元。规格是例如颜色、手机运行内存等信息,参数是例如系统:安卓(Android)后置摄像头像素&…...
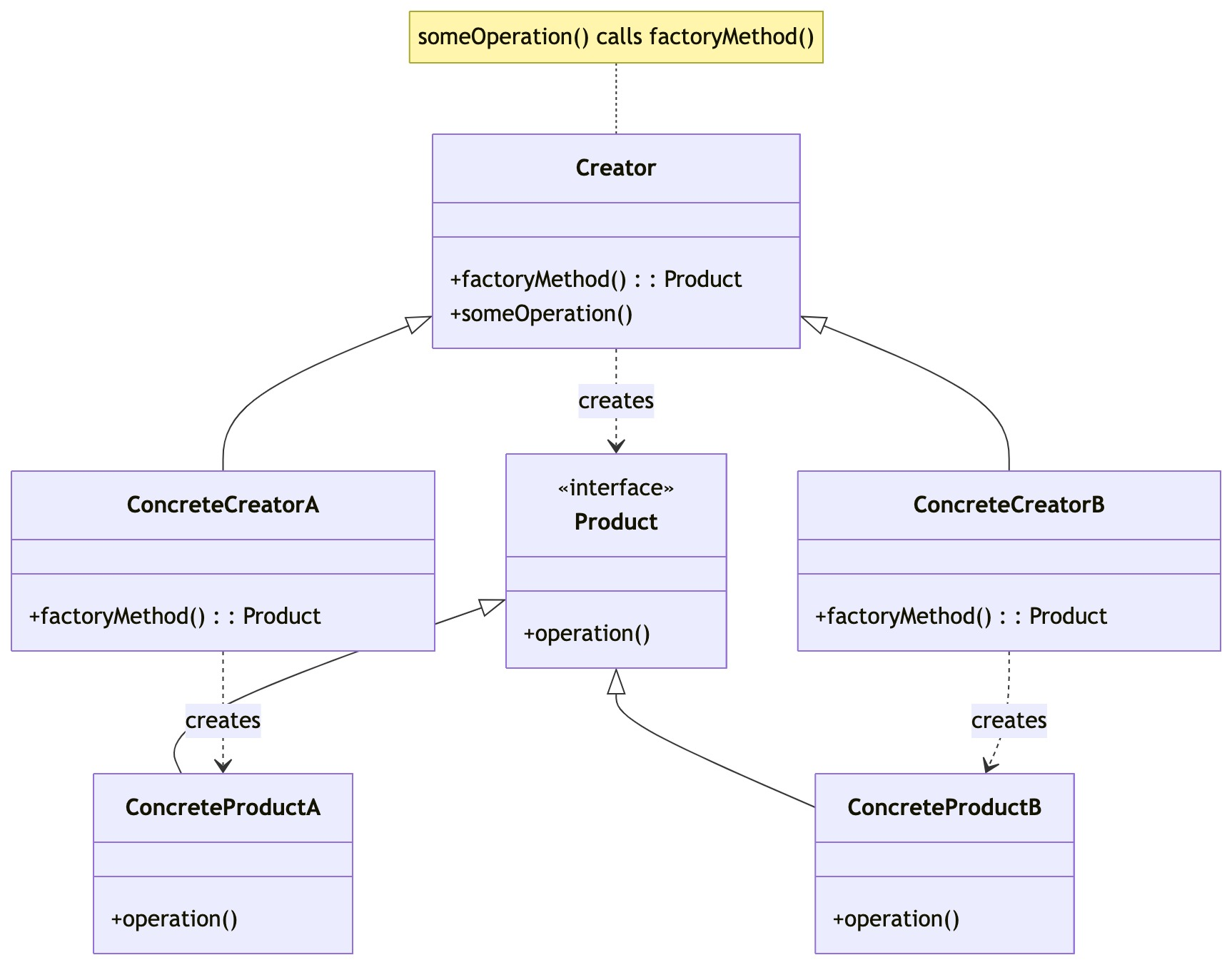
零基础设计模式——创建型模式 - 工厂方法模式
第二部分:创建型模式 - 工厂方法模式 (Factory Method Pattern) 上一节我们学习了单例模式,它关注如何保证一个类只有一个实例。现在,我们来看另一个重要的创建型模式——工厂方法模式。它关注的是如何创建对象,但将创建的决定权…...

LeetCode 404.左叶子之和的递归求解:终止条件与递归逻辑的深度剖析
一、题目解析:左叶子的定义与递归求解思路 题目描述 LeetCode 404. 左叶子之和要求计算二叉树中所有左叶子节点的值之和。左叶子的严格定义是:如果一个节点是其父节点的左子节点,并且它本身没有左右子节点,则称为左叶子。 关键…...
蓝桥杯5130 健身
问题描述 小蓝要去健身,他可以在接下来的 1∼n 天中选择一些日子去健身。 他有 m 个健身计划,对于第 i 个健身计划,需要连续的 天,如果成功完成,可以获得健身增益 si ,如果中断,得不到任何…...
电商虚拟户:重构资金管理逻辑,解锁高效归集与智能分账新范式
一、电商虚拟户的底层架构与核心价值 在数字经济浪潮下,电商交易的复杂性与日俱增,传统账户体系已难以满足平台企业对资金管理的精细化需求。电商虚拟户作为基于银行或持牌支付机构账户体系的创新解决方案,通过构建“主账户子账户”的虚拟账户…...

腾讯2025年校招笔试真题手撕(二)
一、题目 最近以比特币为代表的数字货币市场非常动荡,聪明的小明打算用马尔科夫链来建模股市。如图所示,该模型有三种状态:“行情稳定”,“行情大跌”以及“行情大涨”。每一个状态都以一定的概率转化到下一个状态。比如…...

DeepSeek快速搭建个人网页
一、环境准备 注册DeepSeek账号(https://www.deepseek.com/)安装VSCode插件:DeepSeek Coder准备基础开发环境:# 推荐使用Node.js环境 npm install -g live-server二、三步搭建基础框架 步骤1:生成基础模板 在DeepSeek对话框输入: 生成一个响应式个人网页的HTML模板,包…...
安装完dockers后就无法联网了,执行sudo nmcli con up Company-WiFi,一直在加载中
Docker服务状态检查 执行 systemctl status docker 确认服务是否正常 若未运行,使用 sudo systemctl start docker && sudo systemctl enable docker 网络配置冲突 Docker会创建docker0虚拟网桥,可能与宿主机网络冲突 检查路由表 ip route sho…...