Regmap子系统之六轴传感器驱动-编写icm20607.c驱动
(一)在驱动中要操作很多芯片相关的寄存器,所以需要先新建一个icm20607.h的头文件,用来定义相关寄存器值。
| #ifndef ICM20607_H #define ICM20607_H /*************************************************************** 文件名 : icm20607.h 描述 : ICM20607寄存器地址描述头文件 ***************************************************************/ #define ICM20608G_ID 0XAF /* ID值 */ #define ICM20608D_ID 0XAE /* ID值 */ #define ICM20607_ID 0X05 /* ICM20607寄存器 *复位后所有寄存器地址都为0,除了 *Register 107(0x41) Power Management 1 *Register 117(0x05) WHO_AM_I *Register 26(0x80) CONFIG */ /* 陀螺仪和加速度自测(出产时设置,用于与用户的自检输出值比较) */ /* ICM20607 SELF TEST GYRO Modify 0x ->5x */ #define ICM20_SELF_TEST_X_GYRO 0x50 #define ICM20_SELF_TEST_Y_GYRO 0x51 #define ICM20_SELF_TEST_Z_GYRO 0x52 #define ICM20_SELF_TEST_X_ACCEL 0x0D #define ICM20_SELF_TEST_Y_ACCEL 0x0E #define ICM20_SELF_TEST_Z_ACCEL 0x0F /* 陀螺仪静态偏移 */ #define ICM20_XG_OFFS_USRH 0x13 #define ICM20_XG_OFFS_USRL 0x14 #define ICM20_YG_OFFS_USRH 0x15 #define ICM20_YG_OFFS_USRL 0x16 #define ICM20_ZG_OFFS_USRH 0x17 #define ICM20_ZG_OFFS_USRL 0x18 #define ICM20_SMPLRT_DIV 0x19 #define ICM20_CONFIG 0x1A #define ICM20_GYRO_CONFIG 0x1B #define ICM20_ACCEL_CONFIG 0x1C #define ICM20_ACCEL_CONFIG2 0x1D #define ICM20_LP_MODE_CFG 0x1E #define ICM20_ACCEL_WOM_THR 0x1F #define ICM20_FIFO_EN 0x23 #define ICM20_FSYNC_INT 0x36 #define ICM20_INT_PIN_CFG 0x37 #define ICM20_INT_ENABLE 0x38 #define ICM20_INT_STATUS 0x3A /* 加速度输出 */ #define ICM20_ACCEL_XOUT_H 0x3B #define ICM20_ACCEL_XOUT_L 0x3C #define ICM20_ACCEL_YOUT_H 0x3D #define ICM20_ACCEL_YOUT_L 0x3E #define ICM20_ACCEL_ZOUT_H 0x3F #define ICM20_ACCEL_ZOUT_L 0x40 /* 温度输出 */ #define ICM20_TEMP_OUT_H 0x41 #define ICM20_TEMP_OUT_L 0x42 /* 陀螺仪输出 */ #define ICM20_GYRO_XOUT_H 0x43 #define ICM20_GYRO_XOUT_L 0x44 #define ICM20_GYRO_YOUT_H 0x45 #define ICM20_GYRO_YOUT_L 0x46 #define ICM20_GYRO_ZOUT_H 0x47 #define ICM20_GYRO_ZOUT_L 0x48 #define ICM20_SIGNAL_PATH_RESET 0x68 #define ICM20_ACCEL_INTEL_CTRL 0x69 #define ICM20_USER_CTRL 0x6A #define ICM20_PWR_MGMT_1 0x6B #define ICM20_PWR_MGMT_2 0x6C #define ICM20_FIFO_COUNTH 0x72 #define ICM20_FIFO_COUNTL 0x73 #define ICM20_FIFO_R_W 0x74 #define ICM20_WHO_AM_I 0x75 /* 加速度静态偏移 */ #define ICM20_XA_OFFSET_H 0x77 #define ICM20_XA_OFFSET_L 0x78 #define ICM20_YA_OFFSET_H 0x7A #define ICM20_YA_OFFSET_L 0x7B #define ICM20_ZA_OFFSET_H 0x7D #define ICM20_ZA_OFFSET_L 0x7E #endif |
(二)icm20607.c文件编写
(1)头文件引用
| #include <linux/module.h> #include <linux/init.h> #include <linux/fs.h> // 包含文件系统相关函数的头文件 #include <linux/uaccess.h> // 包含用户空间数据访问函数的头文件 #include <linux/cdev.h> //包含字符设备头文件 #include <linux/device.h> #include <linux/delay.h> #include <linux/spi/spi.h> #include <linux/regmap.h> #include <linux/of.h> #include <linux/of_address.h> #include <linux/of_gpio.h> #include "icm20607.h" |
(2)创建相关宏定义和变量
| #define ICM20607_REG_WHOAMI 0x75 #define ICM20607_WHOAMI_VALUE 0xAF #define DEVICE_NAME "icm20607" // 设备名称 static dev_t dev_num; //分配的设备号 int major; //主设备号 int minor; //次设备号 struct icm20607_dev { struct spi_device *spi_dev; /* spi设备 */ dev_t dev_num; /* 设备号 */ struct cdev cdev; /* cdev */ struct class *class; /* 类 */ struct device *device; /* 设备 */ struct device_node *nd; /* 设备节点 */ int cs_gpio; /* 片选所使用的GPIO编号 */ signed int gyro_x_adc; /* 陀螺仪X轴原始值 */ signed int gyro_y_adc; /* 陀螺仪Y轴原始值 */ signed int gyro_z_adc; /* 陀螺仪Z轴原始值 */ signed int accel_x_adc; /* 加速度计X轴原始值 */ signed int accel_y_adc; /* 加速度计Y轴原始值 */ signed int accel_z_adc; /* 加速度计Z轴原始值 */ signed int temp_adc; /* 温度原始值 */ struct regmap *spi_regmap; /* regmap */ struct regmap_config regmap_config; }; |
(3)驱动模块的入口和出口
| module_init(icm20607_init); module_exit(icm20607_exit); |
(4)icm20607_init和icm20607_exit实现
| static int __init icm20607_init(void) { int ret; ret = spi_register_driver(&icm20607_driver); if (ret < 0) { pr_err("Failed to register ICM20607 driver: %d\n", ret); return ret; } pr_info("ICM20607 SPI device driver loaded\n"); return 0; } static void __exit icm20607_exit(void) { spi_unregister_driver(&icm20607_driver); pr_info("ICM20607 SPI device driver unloaded\n"); } |
在入口函数中调用了spi_register_driver函数,来注册SPI总线驱动程序。在出口函数中调用了spi_unregister_driver函数,来注销驱动程序。
spi_register_driver函数原型如下:
| int spi_register_driver(struct spi_driver *drv); |
该函数接受一个指向struct spi_driver结构体的指针作为参数,并返回一个整数值,表示注册是否成功。struct spi_driver结构体定义了SPI总线驱动程序的属性和回调函数。
以下是struct spi_driver结构体的常见成员:
driver:struct device_driver类型的成员,描述了驱动程序的基本信息,如名称、总线类型等。
probe:指向驱动程序的探测函数的指针。探测函数在与设备匹配时被调用,用于初始化设备并注册相关资源。
remove:指向驱动程序的移除函数的指针。移除函数在设备被卸载时被调用,用于清理和释放相关资源。
id_table:指向struct spi_device_id数组的指针,用于匹配驱动程序和设备之间的关联关系。
probe_new:指向新版的探测函数的指针。新版探测函数支持更多功能,并可以替代旧版的probe函数。
remove_new:指向新版的移除函数的指针。新版移除函数支持更多功能,并可以替代旧版的remove函数。
通过调用spi_register_driver函数并传入正确配置的struct spi_driver结构体,可以将SPI总线驱动程序注册到Linux内核,使其能够接收和处理SPI设备的相关操作。
(5)spi_driver类型结构体定义
| static struct spi_driver icm20607_driver = { .driver = { .name = "icm20607", .owner = THIS_MODULE, .of_match_table = icm20607_of__match, }, .probe = icm20607_probe, .remove = icm20607_remove, }; |
(6)icm20607_of__match实现,用来与设备树中的compatible匹配
| static const struct of_device_id icm20608_of_match[] = { { .compatible = "icm20607" }, { /* Sentinel */ } }; |
(7)remove函数实现,执行icm20607设备的清理操作
| static int icm20607_remove(struct spi_device *spi) { struct icm20607_dev *icm20607dev = spi_get_drvdata(spi); // 在此处执行 ICM20607 设备的清理操作 //删除cdev cdev_del(&icm20607dev->cdev); //注销设备号 unregister_chrdev_region(icm20607dev->dev_num, 1); //注销设备 device_destroy(icm20607dev->class, icm20608dev->dev_num); //注销类 class_destroy(icm20607dev->class); //删除regmap regmap_exit(icm20607dev->spi_regmap); pr_info("ICM20607 SPI device removed successfully\n"); return 0; } |
(8)probe函数实现,此处简略描述regmap注册的过程:
| static int icm20607_probe(struct spi_device *spi) { int ret; unsigned int whoami; struct icm20607_dev *icm20607dev; //分配icm20607dev对象的空间 icm20607dev = devm_kzalloc(&spi->dev, sizeof(*icm20607dev), GFP_KERNEL); if(!icm20607dev) return -ENOMEM; // 创建 ICM20607 设备的 regmap icm20608dev->spi_regmap = regmap_init_spi(spi, &spi_regmap_config); if (IS_ERR(icm20607dev->spi_regmap)) { dev_err(&spi->dev, "Failed to initialize regmap: %ld\n", PTR_ERR(icm20607dev->spi_regmap)); return PTR_ERR(icm20607dev->spi_regmap); } ...... /*初始化spi_device */ icm20607dev->spi_dev = spi; spi->mode = SPI_MODE_0; spi_setup(spi); /* 初始化ICM20607内部寄存器 */ icm20607_reginit(icm20607dev); /* 保存icm20607dev结构体 */ spi_set_drvdata(spi, icm20607dev); pr_info("ICM20607 SPI device probed successfully\n"); return 0; } |
probe函数中首先使用devm_kzalloc函数分配了icm20607dev的结构体空间,然后使用regmap_init_spi函数创建regmap实例,再进行spi控制器的初始化和配置,最后对ICM20607的内部寄存器进行配置。
其中regmap_init_spi函数中传入了“&spi_regmap_config”参数,前边有提到这个是用来配置regmap对象的,下边我们看这个参数是如何定义的。
(9)spi_regmap_config的定义
| static const struct regmap_config spi_regmap_config = { .reg_bits = 8, .val_bits = 8, .read_flag_mask = 0x80, .reg_read = icm20607_spi_read, .reg_write = icm20607_spi_write, .max_register = ICM20607_REG_WHOAMI, }; |
可以看到这其中规定了寄存器地址的位数,存储寄存器的位数,读寄存器掩码,读寄存器函数,写寄存器函数,最大寄存器地址。
(10)读写寄存器函数实现
| static int icm20607_spi_read(struct icm20608_dev *dev, unsigned int reg, unsigned int *val) { return regmap_read(dev->spi_regmap, reg, val); } static int icm20607_spi_write(struct icm20608_dev *dev, unsigned int reg, unsigned int val) { return regmap_write(dev->spi_regmap, reg, val); } |
可以看出读写函数非常简单明了,直接使用regmap_read和regmap_write函数即可。
①regmap_read函数原型如下:
| int regmap_read(struct regmap *map, unsigned int reg, unsigned int *val); |
该函数用于从给定的寄存器地址(reg)读取数据,并将读取的值存储在val指向的变量中。map参数是一个指向struct regmap的指针,表示寄存器映射对象。返回值为0表示读取成功,否则表示读取失败。
②regmap_write函数原型如下:
| int regmap_write(struct regmap *map, unsigned int reg, unsigned int val); |
该函数用于向给定的寄存器地址(reg)写入数据(val)。map参数是一个指向struct regmap的指针,表示寄存器映射对象。返回值为0表示写入成功,否则表示写入失败。
相关文章:

Regmap子系统之六轴传感器驱动-编写icm20607.c驱动
(一)在驱动中要操作很多芯片相关的寄存器,所以需要先新建一个icm20607.h的头文件,用来定义相关寄存器值。 #ifndef ICM20607_H #define ICM20607_H /*************************************************************** 文件名 : i…...

常见高危端口解析:网络安全中的“危险入口”
目录 1. 经典高危端口列表 2. 典型漏洞案例:445端口与永恒之蓝 攻击原理 防御方案 Linux命令 2. 防护策略建议 三、扩展思考:从端口到攻防体系 结语 1. 经典高危端口列表 端口号 协议/服务 风险场景 21 FTP 明文传输凭据、弱密码爆破、匿名…...
华为2025年校招笔试手撕真题教程(二)
一、题目 大湾区某城市地铁线路非常密集,乘客很难一眼看出选择哪条线路乘坐比较合适,为了解决这个问题,地铁公司希望你开发一个程序帮助乘客挑选合适的乘坐线路,使得乘坐时间最短,地铁公司可以提供的数据是各相邻站点…...
征程 6 J6E/M linear 双int16量化支持替代方案
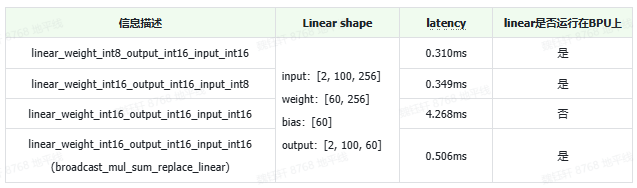
1.背景简介 当发现使用 plugin 精度 debug 工具定位到是某个 linear 敏感时,示例如下: op_name sensitive_type op_type L1 quant_dty…...
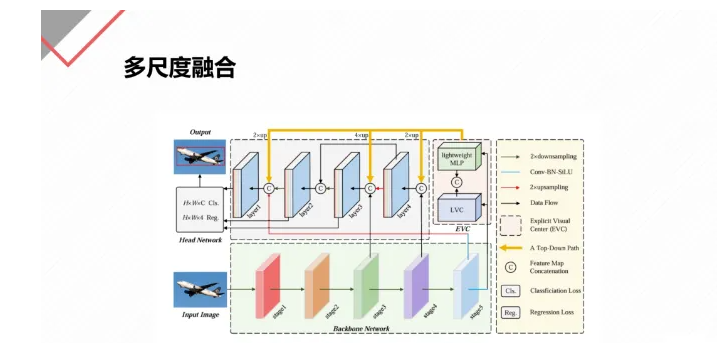
深度学习模块缝合拼接方法套路+即插即用模块分享
前言 在深度学习中,模型的设计往往不是从头开始,而是通过组合不同的模块来构建。这种“模块缝合”技术,就像搭积木一样,把不同的功能模块拼在一起,形成一个强大的模型。今天,我们就来聊聊四种常见的模块缝…...
改写视频生产流程!快手SketchVideo开源:通过线稿精准控制动态分镜的AI视频生成方案
Sketch Video 的核心特点 Sketch Video 通过手绘生成动画的形式,将复杂的信息以简洁、有趣的方式展现出来。其核心特点包括: 超强吸引力 Sketch Video 的手绘风格赋予了视频一种质朴而真实的质感,与常见的精致特效视频形成鲜明对比。这种独…...

Graphics——基于.NET 的 CAD 图形预览技术研究与实现——CAD c#二次开发
一、Graphics 类的本质与作用 Graphics 是 .NET 框架中 System.Drawing 命名空间下的核心类,用于在二维画布(如 Bitmap 图像)上绘制图形、文本或图像。它相当于 “绘图工具”,提供了一系列方法(如 DrawLine、FillElli…...

ElasticSearch 8.x 快速上手并了解核心概念
目录 核心概念概念总结 常见操作索引的常见操作常见的数据类型指定索引库字段类型mapping查看索引库的字段类型最高频使用的数据类型 核心概念 在新版Elasticsearch中,文档document就是一行记录(json),而这些记录存在于索引库(index)中, 索引名称必须是…...

AI神经网络降噪 vs 传统单/双麦克风降噪的核心优势对比
1. 降噪原理的本质差异 对比维度传统单/双麦克风降噪AI神经网络降噪技术基础基于固定规则的信号处理(如谱减法、维纳滤波)基于深度学习的动态建模(DNN/CNN/Transformer)噪声样本依赖预设有限噪声类型训练数据覆盖数十万种真实环境…...
04-Web后端基础(基础知识)
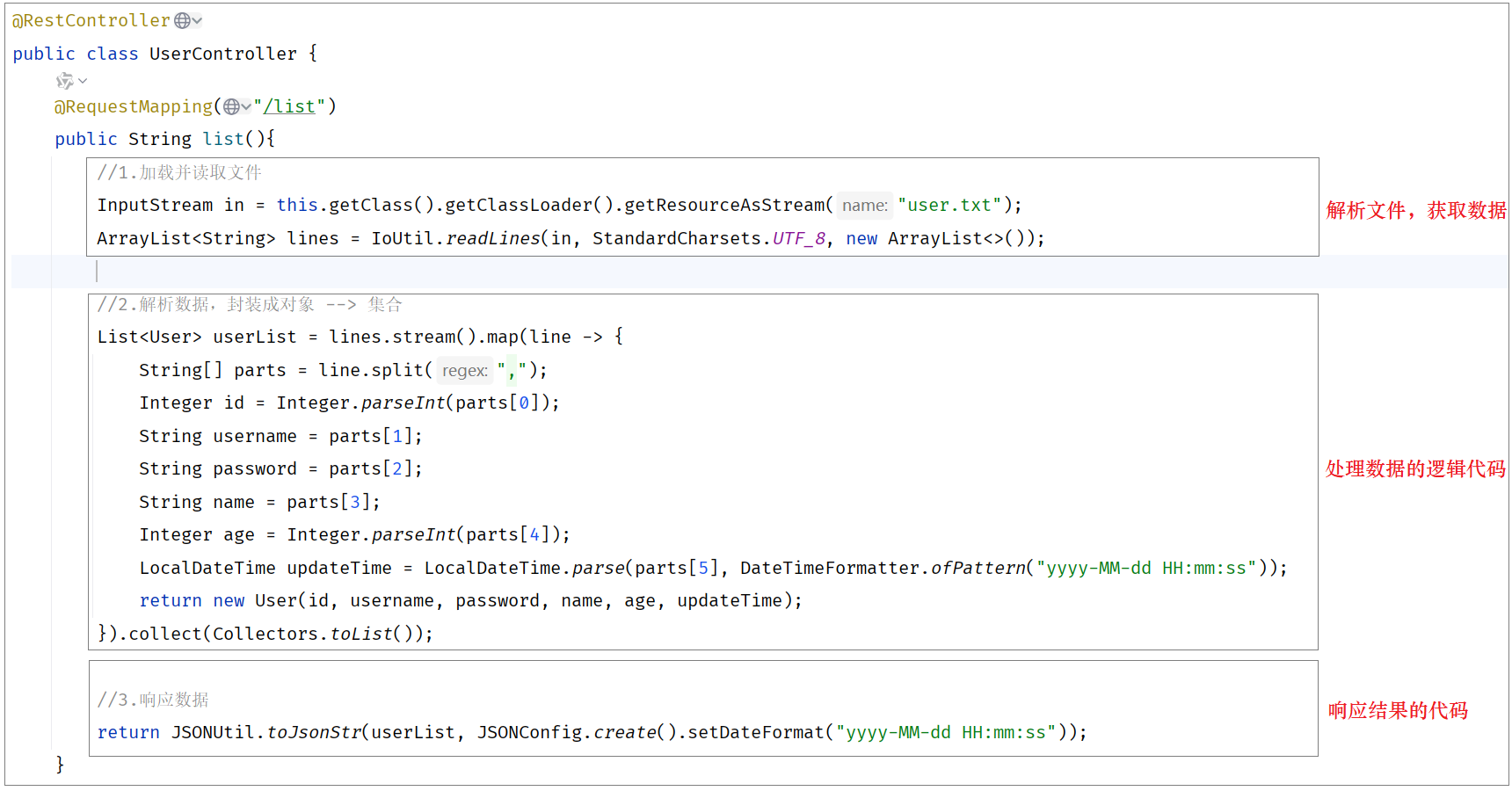
而像HTML、CSS、JS 以及图片、音频、视频等这些资源,我们都称为静态资源。 所谓静态资源,就是指在服务器上存储的不会改变的数据,通常不会根据用户的请求而变化。 那与静态资源对应的还有一类资源,就是动态资源。那所谓动态资源&…...
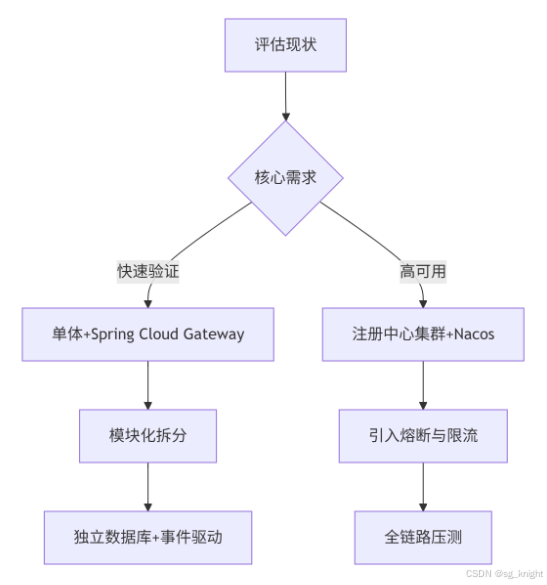
Spring Cloud生态与技术选型指南:如何构建高可用的微服务系统?
引言:为什么选择Spring Cloud? 作为全球开发者首选的微服务框架,Spring Cloud凭借其开箱即用的组件、与Spring Boot的无缝集成,以及活跃的社区生态,成为企业级微服务架构的基石。但在实际项目中,如何从众多…...
手写简单的tomcat
首先,Tomcat是一个软件,所有的项目都能在Tomcat上加载运行,Tomcat最核心的就是Servlet集合,本身就是HashMap。Tomcat需要支持Servlet,所以有servlet底层的资源:HttpServlet抽象类、HttpRequest和HttpRespon…...

高等数学-积分
一、不定积分 定理:如果函数f(x)在区间I上连续,那么f(x)在区间I上一定有原函数,即一定存在区间I上的可导函数F(x),使得F(x)f(x) ,x∈I 简单地说:连续函数必有原函数。 极限lim*0->x {[∫*0^x sin(t^2)…...
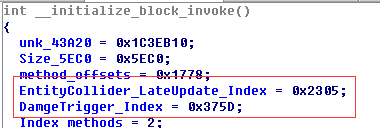
IOS平台Unity3D AOT全局模块结构分析
分析背景 由于IOS平台中不允许执行动态代码,Unity 4.6之前的版本在IOS平台中采用了AOT的处理方式,提前将C#代码静态编译为机器识别的二进制机器码。Unity引擎4.6之前的版本中IOS框架采用了Mono的AOT机制实现静态编译和处理,本文针对全局AOT模…...

Vue 3.0中自定义指令
自定义指令是增强 Vue 组件的重要手段。常见的内置指令有: v-if、v-show、v-model、v-bind、v-on等。 本文将详细讲解如何创建和使用自定义指令,关注以下几个关键点: 1. 指令的钩子函数:类似于生命周期钩子函数。 2. 指令钩子函…...

在 语义分割 和 图像分类 任务中,image、label 和 output 的形状会有所不同。
1. 图像分类 (Image Classification) 图像分类 任务是将整个图像分类为一个类别。通常,output 是对整个图像的类别的预测,而 label 是该图像的真实类别。 1.1 image 的形状 image 是输入图像数据,通常是一个四维张量: 形状&…...

C++面试4-sizeof解析
C++sizeof关键字的深度解析 一、本质认知:编译器的尺度 1. 编译期操作符的基因 int arr[5]; cout << sizeof(arr); // 输出20(假设int为4字节)非运行时特性:在编译阶段完成计算,不会生成任何机器指令表达式不求值:sizeof(++i)不会改变i的值类型感知:对类型名使…...

CyberSecAsia专访CertiK首席安全官:区块链行业亟需“安全优先”开发范式
近日,权威网络安全媒体CyberSecAsia发布了对CertiK首席安全官Wang Tielei博士的专访,双方围绕企业在进军区块链领域时所面临的关键安全风险与防御策略展开深入探讨。 Wang博士在采访中指出,跨链桥攻击、智能合约漏洞以及私钥管理不当&#x…...

uniapp如何设置uni.request可变请求ip地址
文章目录 简介方法一:直接在请求URL中嵌入变量方法二:使用全局变量方法三:使用环境变量方法四:服务端配置方法五:使用配置文件(如config.js):总结 简介 在uni-app中,uni.request 用…...

文件操作和IO-3 文件内容的读写
文件内容的读写——数据流 流是操作系统提供的概念,Java对操作系统的流进行了封装。 数据流就像水流,生生不息,绵延不断。 水流的特点:比如要100mL的水,可以一次接10mL,分10次接完,也可以一次接…...

架构的设计
搭建架构的最低前提 1.设计清晰: 需求文档: 有哪些界面 每个界面提够了哪些功能 这些功能是怎样操作的 会有哪些反馈 2.技术: 写架构的同学:这次项目设计的技术 都要有料及(用到的技术有哪些特点 有哪些缺点&…...

SpringAI 大模型应用开发篇-SpringAI 项目的新手入门知识
🔥博客主页: 【小扳_-CSDN博客】 ❤感谢大家点赞👍收藏⭐评论✍ 1.0 SpringAI 概述 目前大模型应用开发最常见的框架就是 LangChain,然而 LangChain 是基于 Python 语言,虽然有 LangChain4j,但是对于大量使…...

编程速递-RAD Studio 12.3 Athens五月补丁:May Patch Available
编程速递-RAD Studio 12.3 Athens四月补丁:关注软件性能的开发者,安装此补丁十分必要 今天 (2025 年 5 月 19 日)Embarcadero 发布了 RAD Studio、Delphi 和 CBuilder 12.3 Athens(雅典)的第二个补丁。 RA…...
)
Vue3实现轮播表(表格滚动)
在这之前,写过一篇Vue2实现该效果的博文:vue-seamless-scroll(一个简单的基于vue.js的无缝滚动) 有兴趣也可以去看下,这篇是用vue3实现,其实很简单,目的是方便后面用到直接复制既可以了。 安装: <...
Python爬虫高阶:动态页面破解与验证码OCR识别全流程实战)
Python爬虫(33)Python爬虫高阶:动态页面破解与验证码OCR识别全流程实战
目录 一、技术背景与行业痛点二、核心技术与实现路径2.1 动态页面处理方案对比2.2 Selenium深度集成实践2.3 OCR验证码破解方案1. 预处理阶段:2. 识别阶段:3. 后处理阶段 三、典型应用场景解析3.1 电商价格监控系统1. 技术架构2. 实现效果 3.2 社交媒体舆…...
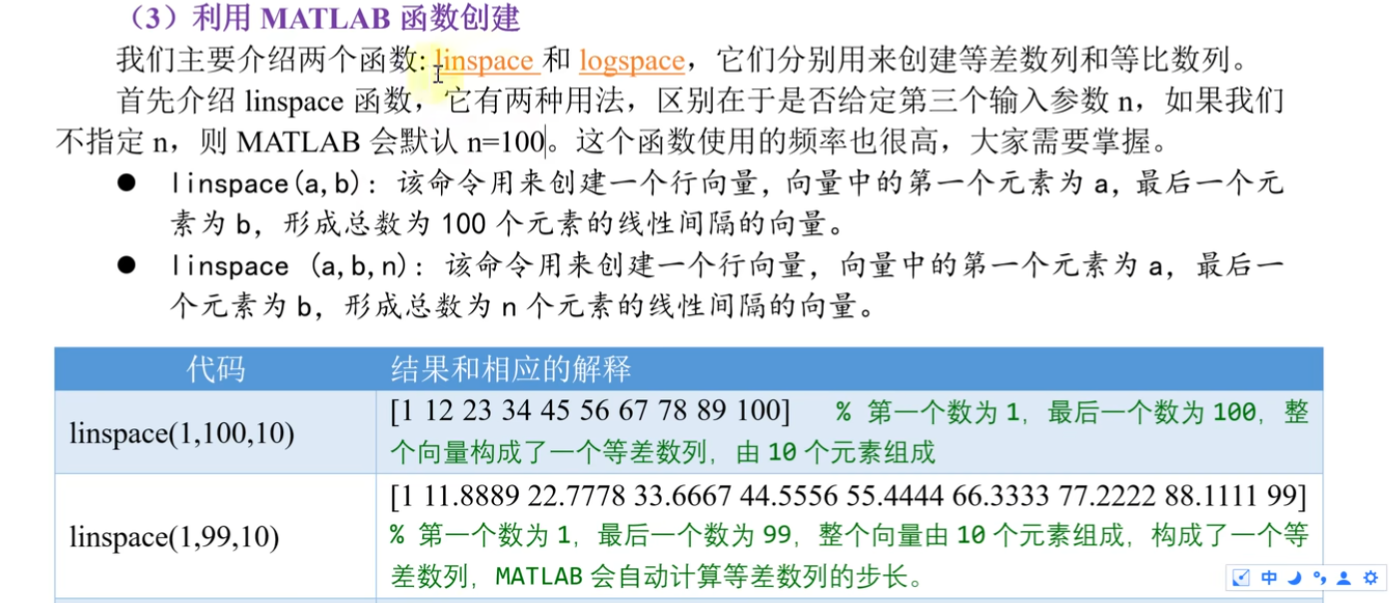
Matlab学习合集
1.变量 2.常见的数学函数 3. 向量 向量的创建: 直接创建:针对于数量少的情况 冒号法 函数创建:...
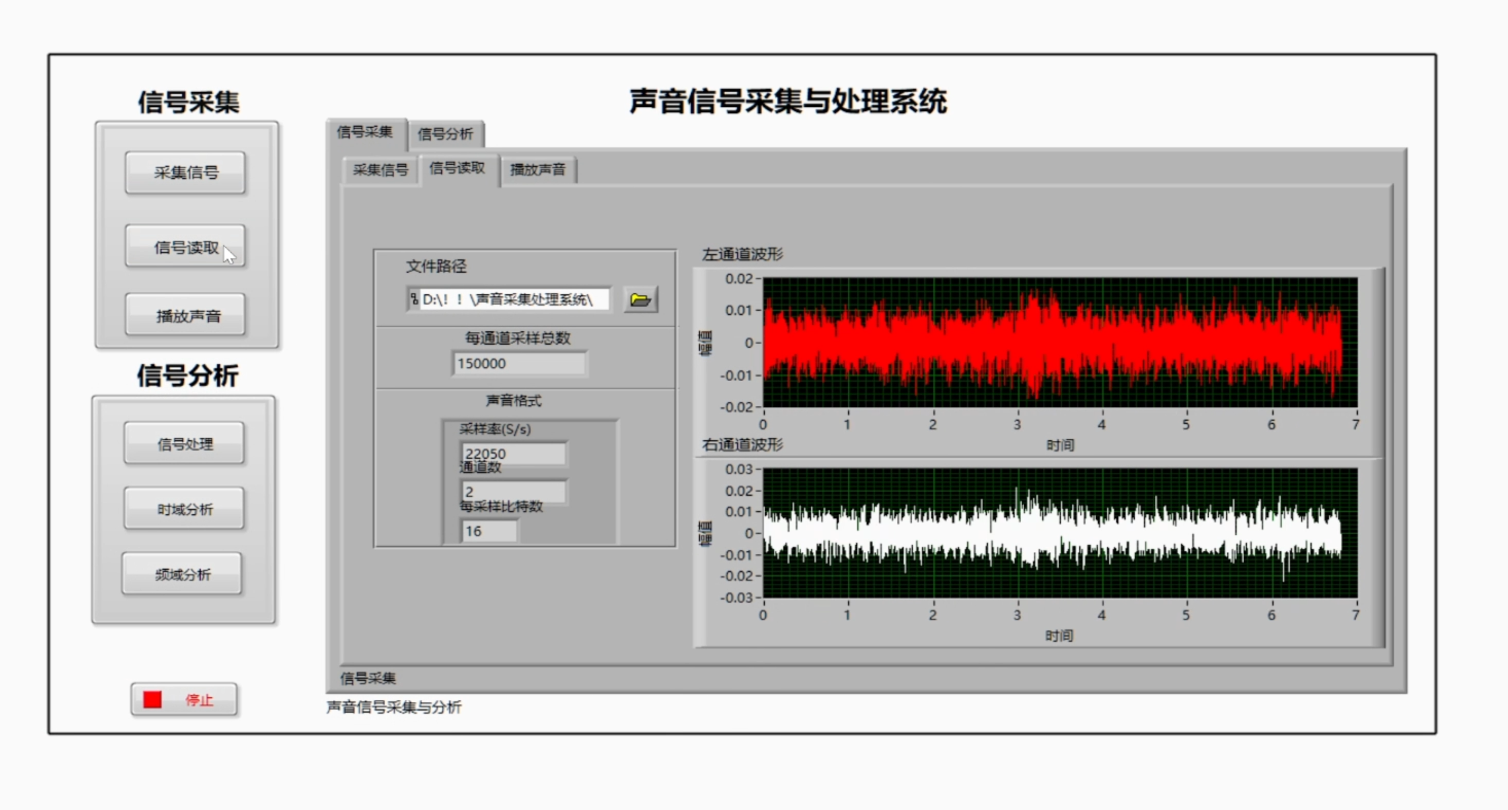
基于labview的声音采集与存储分析系统
基于LabVIEW的声音信号采集与存储分析系统开发实战:从原理到代码实现 (内含源码)基于labview的声音采集与处理系统 点击跳转工坊 点击跳转视频 引言 在音频技术与工业监测领域,声音信号的实时采集与分析是一项基础且关键的任务。…...
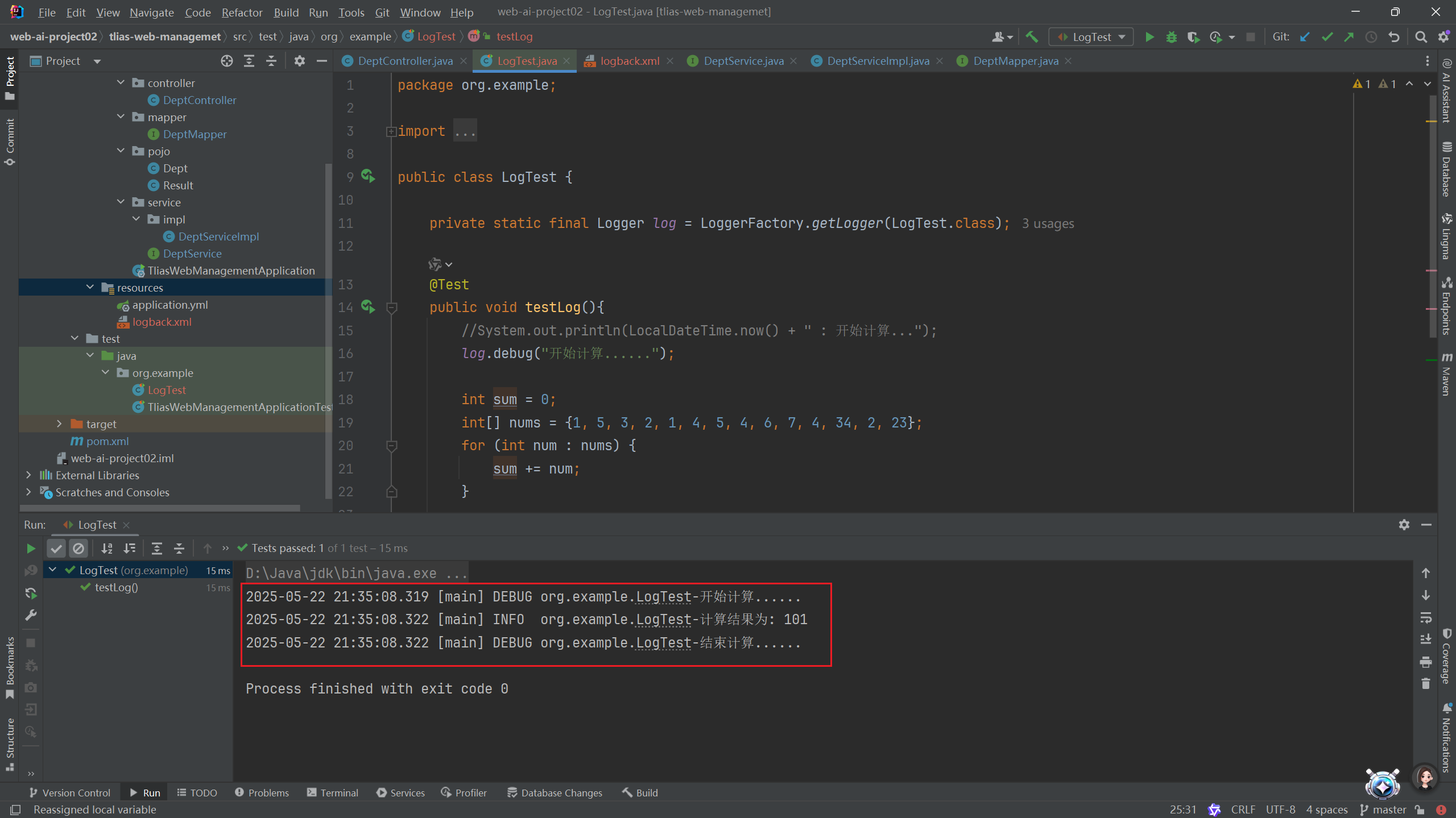
【项目记录】部门增删改及日志技术
1 删除部门 1.1 需求 删除部门数据。在点击 "删除" 按钮,会根据ID删除部门数据。 了解了需求之后,我们再看看接口文档中,关于删除部门的接口的描述,然后根据接口文档进行服务端接口的开发。 1.2 接口描述 1.2.1 基…...

TDengine 更多安全策略
简介 上一节我们介绍了 TDengine 安全部署配置建议,除了传统的这些配置外,TDengine 还有其他的安全策略,例如 IP 白名单、审计日志、数据加密等,这些都是 TDengine Enterprise 特有功能,其中白名单功能在 3.2.0.0 版本…...
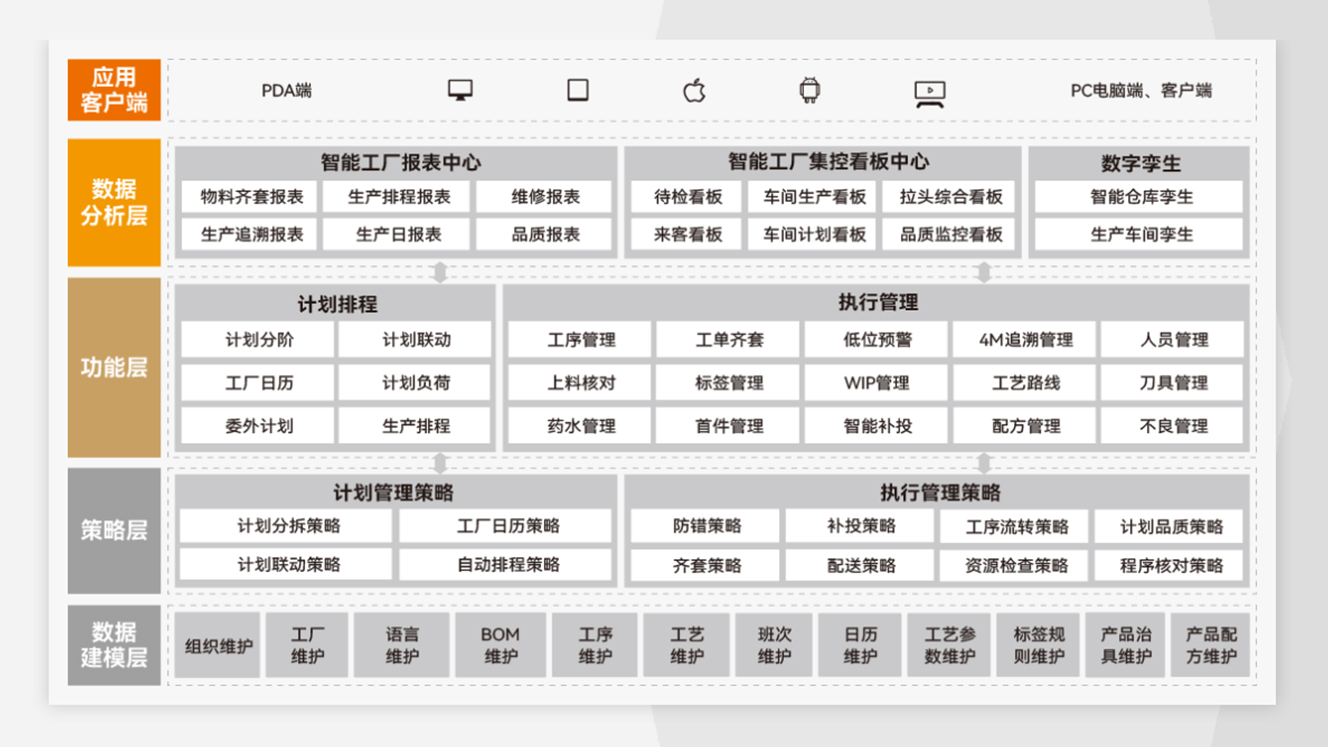
电子制造企业智能制造升级:MES系统应用深度解析
在全球电子信息产业深度变革的2025年,我国电子信息制造业正经历着增长与转型的双重考验。据权威数据显示,2025年一季度行业增加值同比增长11.5%,但智能手机等消费电子产量同比下降1.1%,市场竞争白热化趋势显著。叠加关税政策调整、…...