西门子 S1500 博途软件舞台威亚 3D 控制方案
西门子 S1500 PLC 是工业自动化领域的主流控制器,适合高精度、高可靠性的舞台威亚控制。下面为你提供基于博途 (TIA Portal) 软件的 3D 控制方案设计。
系统架构设计
舞台威亚 3D 控制系统通常包含以下组件:
-
硬件层:
- S1500 PLC 主机
- 伺服驱动器与电机 (控制威亚升降)
- 编码器 (位置反馈)
- HMI 人机界面 (可选)
-
软件层:
- TIA Portal 博途开发环境
- PLC 程序 (OB1 主循环、OB32 定时中断等)
- 工艺对象 (轴控制)
-
功能模块:
- 坐标转换算法
- 多轴同步控制
- 路径规划
- 安全监控
PLC 程序设计
以下是一个基于西门子 SCL (结构化控制语言) 的威亚 3D 控制核心算法示例:
FUNCTION_BLOCK "WireControl"
{ S7_Optimized_Access = 'TRUE' }
VERSION : 0.1VAR_INPUT Enable : BOOL; // 使能信号TargetPos : STRUCT // 目标3D位置(mm)X : REAL;Y : REAL;Z : REAL;END_STRUCT;UpdateRate : INT := 10; // 更新速率(ms)END_VARVAR_OUTPUT AxisSetpoints : ARRAY[1..4] OF REAL; // 四台电机设定值(mm)AxisStatus : ARRAY[1..4] OF BOOL; // 电机状态SystemReady : BOOL; // 系统就绪END_VARVAR // 锚点位置(舞台四角上方)AnchorPoints : ARRAY[1..4] OF STRUCTX : REAL;Y : REAL;Z : REAL;END_STRUCT := [(X:=0.0, Y:=0.0, Z:=10000.0), // 左上角(X:=10000.0, Y:=0.0, Z:=10000.0), // 右上角(X:=10000.0, Y:=10000.0, Z:=10000.0), // 右下角(X:=0.0, Y:=10000.0, Z:=10000.0) // 左下角];// 当前位置CurrentPos : STRUCTX : REAL;Y : REAL;Z : REAL;END_STRUCT;// 轨迹规划参数Trajectory : STRUCTMaxSpeed : REAL := 500.0; // 最大速度(mm/s)MaxAcceleration : REAL := 200.0; // 最大加速度(mm/s²)CurrentSpeed : REAL; // 当前速度DistanceToGo : REAL; // 剩余距离END_STRUCT;// 轴对象引用AxisRef : ARRAY[1..4] OF Axis_Telegram_1;// 安全限制SafetyLimits : STRUCTMinZ : REAL := 1000.0; // 最小Z高度MaxZ : REAL := 8000.0; // 最大Z高度XRange : STRUCTMin : REAL := 500.0;Max : REAL := 9500.0;END_STRUCT;YRange : STRUCTMin : REAL := 500.0;Max : REAL := 9500.0;END_STRUCT;END_STRUCT;// 时间管理Timer : TON;TimeBase : REAL; // 时间基准(s)END_VAR// 主程序METHOD PUBLIC _INIT : BOOL// 初始化方法_INIT := TRUE;END_METHOD// 计算四台电机的线长METHOD CalculateWireLengths : ARRAY[1..4] OF REALVAR_TEMPResult : ARRAY[1..4] OF REAL;i : INT;END_VARFOR i := 1 TO 4 DO// 计算各锚点到目标位置的距离Result[i] := SQRT(POW(AnchorPoints[i].X - TargetPos.X, 2) +POW(AnchorPoints[i].Y - TargetPos.Y, 2) +POW(AnchorPoints[i].Z - TargetPos.Z, 2));END_FOR;RETURN Result;END_METHOD// 轨迹规划METHOD PlanTrajectory : BOOLVAR_TEMPDistance : REAL;TargetLengths : ARRAY[1..4] OF REAL;CurrentLengths : ARRAY[1..4] OF REAL;MaxDist : REAL;i : INT;END_VAR// 计算当前位置的线长CurrentLengths := CalculateWireLengths(CurrentPos);// 计算目标位置的线长TargetLengths := CalculateWireLengths(TargetPos);// 找出最大移动距离MaxDist := 0.0;FOR i := 1 TO 4 DODistance := ABS(TargetLengths[i] - CurrentLengths[i]);IF Distance > MaxDist THENMaxDist := Distance;END_IF;END_FOR;Trajectory.DistanceToGo := MaxDist;// 简单的S曲线加减速规划IF Trajectory.DistanceToGo > 0.1 THEN// 计算所需时间TimeBase := REAL(UpdateRate) / 1000.0;// 速度规划(简化版)IF Trajectory.CurrentSpeed < Trajectory.MaxSpeed THENTrajectory.CurrentSpeed := MIN(Trajectory.CurrentSpeed + Trajectory.MaxAcceleration * TimeBase, Trajectory.MaxSpeed);END_IF;// 更新当前位置(简化版)CurrentPos.X := CurrentPos.X + (TargetPos.X - CurrentPos.X) * Trajectory.CurrentSpeed * TimeBase / Trajectory.DistanceToGo;CurrentPos.Y := CurrentPos.Y + (TargetPos.Y - CurrentPos.Y) * Trajectory.CurrentSpeed * TimeBase / Trajectory.DistanceToGo;CurrentPos.Z := CurrentPos.Z + (TargetPos.Z - CurrentPos.Z) * Trajectory.CurrentSpeed * TimeBase / Trajectory.DistanceToGo;// 更新剩余距离Trajectory.DistanceToGo := Trajectory.DistanceToGo - Trajectory.CurrentSpeed * TimeBase;RETURN TRUE;ELSE// 到达目标位置CurrentPos := TargetPos;Trajectory.CurrentSpeed := 0.0;RETURN FALSE;END_IF;END_METHOD// 安全检查METHOD SafetyCheck : BOOLVAR_TEMPResult : BOOL := TRUE;END_VAR// 检查Z轴高度IF TargetPos.Z < SafetyLimits.MinZ OR TargetPos.Z > SafetyLimits.MaxZ THENResult := FALSE;END_IF;// 检查X范围IF TargetPos.X < SafetyLimits.XRange.Min OR TargetPos.X > SafetyLimits.XRange.Max THENResult := FALSE;END_IF;// 检查Y范围IF TargetPos.Y < SafetyLimits.YRange.Min OR TargetPos.Y > SafetyLimits.YRange.Max THENResult := FALSE;END_IF;RETURN Result;END_METHOD// 主程序循环METHOD Execute// 启动定时器Timer(IN:=Enable, PT:=T#10MS);IF Timer.Q THEN// 重置定时器Timer(IN:=FALSE);// 安全检查IF NOT SafetyCheck() THEN// 触发安全机制SystemReady := FALSE;RETURN;END_IF;// 执行轨迹规划IF Enable AND PlanTrajectory() THEN// 计算电机设定值AxisSetpoints := CalculateWireLengths(CurrentPos);// 更新轴状态(实际项目中应读取轴反馈)FOR i := 1 TO 4 DOAxisStatus[i] := TRUE; // 简化处理,实际应读取轴状态END_FOR;SystemReady := TRUE;ELSESystemReady := FALSE;END_IF;END_IF;END_METHOD
END_FUNCTION_BLOCK博途软件配置步骤
-
创建新项目:
- 在 TIA Portal 中创建新项目,添加 S1500 PLC 设备
- 配置 CPU 和通信模块
-
配置工艺对象:
- 添加轴对象,连接到实际伺服驱动器
- 配置轴参数 (如最大速度、加速度、回零方式)
-
创建 FB 功能块:
- 复制上述 SCL 代码到新创建的 FB 中
- 添加必要的背景数据块
-
OB1 主循环:
// OB1主程序
"WireControl"(Enable := "MainEnable",TargetPos := "TargetPosition",UpdateRate := 10,AxisSetpoints => "AxisSetpoints",AxisStatus => "AxisStatus",SystemReady => "SystemReady"
);// 轴控制
FOR i := 1 TO 4 DOMC_MoveAbsolute(Axis := "Axis_"(i),Position := "AxisSetpoints[i]",Velocity := 500.0,Acceleration := 1000.0,Deceleration := 1000.0,Jerk := 2000.0,Override := 100.0,Execute := "AxisStatus[i]" AND "SystemReady",Cancel := FALSE,Interrupt := FALSE,CommandAborted => ,Error => ,ErrorID => );
END_FOR;-
HMI 界面设计:
- 创建操作画面,显示当前位置和状态
- 添加位置输入和控制按钮
- 设计趋势图监控电机运行状态
系统扩展建议
-
多威亚协同控制:
- 扩展功能块支持多个威亚设备
- 添加同步控制算法确保动作协调
-
路径规划优化:
- 实现样条曲线插值,使运动更平滑
- 添加避障算法避免碰撞
-
安全机制:
- 添加紧急停止和限位保护
- 实现故障诊断和报警功能
-
远程监控:
- 集成 OPC UA 服务器,支持远程访问
- 开发手机 APP 或 Web 界面监控系统状态
这套方案充分利用了西门子 PLC 的可靠性和 SCL 语言的强大功能,适合专业舞台威亚控制系统。实际应用中,你可能需要根据具体的硬件配置和工艺要求进行调整。
相关文章:

西门子 S1500 博途软件舞台威亚 3D 控制方案
西门子 S1500 PLC 是工业自动化领域的主流控制器,适合高精度、高可靠性的舞台威亚控制。下面为你提供基于博途 (TIA Portal) 软件的 3D 控制方案设计。 系统架构设计 舞台威亚 3D 控制系统通常包含以下组件: 硬件层: S1500 PLC 主机伺服驱动…...
)
洛谷 P3374 【模板】树状数组 1(线段树解法)
【题目链接】 洛谷 P3374 【模板】树状数组 1 【题目考点】 1. 线段树 线段树(Segment tree)是一种用来维护区间信息的数据结构。 线段树中每个结点代表一个区间 根结点代表整体区间。 叶子结点代表长为1的单位区间。 对于线段树中的每一个分支结点 [ l , r ] [l, r] [l,r]…...

欣佰特科技| SIL2/PLd 认证 Inxpect毫米波安全雷达:3D 扫描 + 微小运动检测守护工业安全
Inxpect 成立于意大利,专注工业安全技术。自成立起,便致力于借助先进雷达技术提升工业自动化安全标准,解决传统安全设备在复杂环境中的局限,推出获 SIL2/PLd 和 UL 认证的安全雷达产品。 Inxpect 的雷达传感器技术优势明显。相较于…...

大模型量化原理
模型量化的原理是通过降低数值精度来减少模型大小和计算复杂度。让我详细解释其核心原理:我已经为您创建了一个全面的模型量化原理详解文档。总结几个核心要点: 量化的本质 量化的核心是精度换性能的权衡——通过降低数值精度(FP32→INT8&a…...

dify-api的.env配置文件
源码位置:dify\api\.env 本文使用Dify v1.3.1。配置文件中各变量的详细信息表,如下所示: 变量英文名变量中文名默认值变量功能SECRET_KEY秘密密钥XXX用于安全地签署会话cookie的应用秘密密钥。确保在部署时使用强密钥。CONSOLE_API_URL控制…...
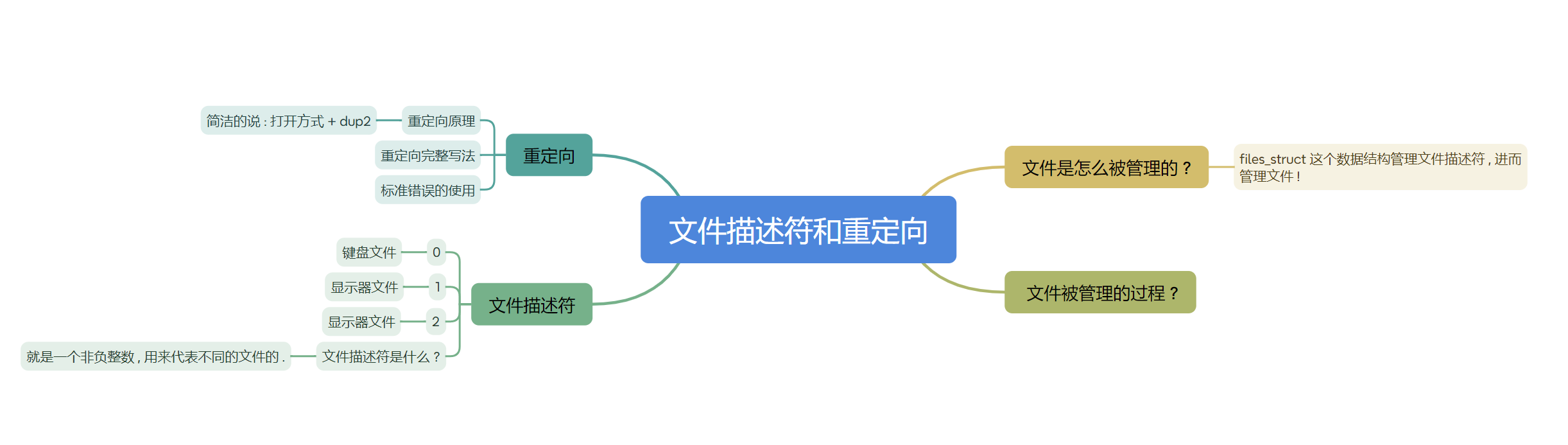
【Linux】Linux 操作系统 - 18 , 重谈文件(二) ~ 文件描述符和重定向原理 , 手把手带你彻底理解 !!!
文章目录 ● 文件描述符一 、Linux 系统对文件的管理(要知道)二 、什么是文件描述符 fd ?三 、再探文件被管理过程(重要)四 、文件描述符 0 、1、21. 文件描述符的分配原则2. 提前认识三个默认打开的文件 ● 重定向原理(重要)一 、重定向现象二 、深入剖析重定向现象(重要)1…...
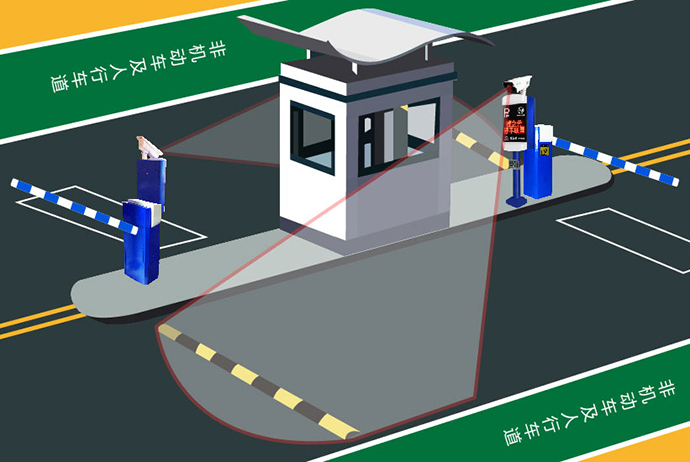
第五十三节:综合项目实践-车牌识别系统
一、项目背景与意义 车牌识别系统(LPR)是智能交通领域的核心技术之一,广泛应用于停车场管理、违章抓拍、高速公路收费等场景。本文将通过Python+OpenCV实现一个完整的车牌识别系统,涵盖图像预处理→车牌定位→字符分割→字符识别四大核心环节。 二、系统架构设计 技术栈组…...
)
AI时代新词-AI伦理(AI Ethics)
一、什么是AI伦理? AI伦理(AI Ethics)是指在人工智能(AI)的设计、开发、部署和使用过程中,涉及的道德、法律和社会问题的综合考量。它关注AI技术对人类社会、文化、价值观以及个人权利的影响,并…...

湖北理元理律师事务所债务优化服务中的“四维平衡“之道
债务问题解决需要兼顾多方利益,湖北理元理律师事务所通过独特的服务模式,在法律、经济、心理、社会四个维度建立平衡点。 一、法律维度的专业把控 合规性审查: 合同效力认定 诉讼时效核查 担保责任界定 程序合法性: 所有协…...

Git Push 失败:HTTP 413 Request Entity Too Large
Git Push 失败:HTTP 413 Request Entity Too Large 问题排查 在使用 Git 推送包含较大编译产物的项目时,你是否遇到过 HTTP 413 Request Entity Too Large 错误?这通常并不是 Git 的问题,而是 Web 服务器(如 Nginx&am…...
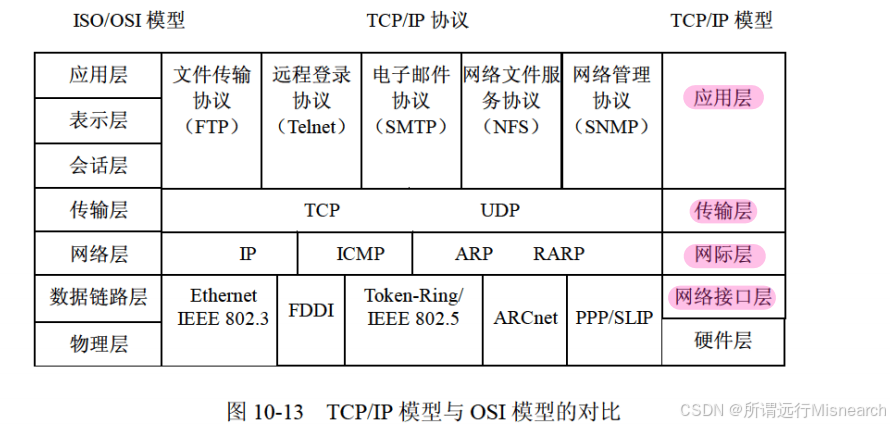
第10章 网络与信息安全基础知识
网络概述 多模光纤的特点:成本低,宽芯线,聚光好,耗散大,低效,用于低速度、短距离的通信。 单模光纤的特点:成本高,窄芯线,需要激光源,耗散小,高效…...
)
GO语言学习(九)
GO语言学习(九) 上一期我们了解了实现web的工作中极为重要的net/http抱的细节讲解,大家学会了实现web开发的一些底层基础知识,在这一期我来为大家讲解一下web工作的一个重要方法,:使用数据库,现…...

go 访问 sftp 服务 github.com/pkg/sftp 的使用踩坑,连接未关闭(含 sftp 服务测试环境搭建)
前言 最近在使用 sftp 服务时,被告知发起了海量的连接,直接把服务器搞崩,ip 被封了。 这是啥情况? golang 写的代码,我就正常的访问 sftp 服务,连接使用过后也都关闭了,咋会出现连接一直连着…...
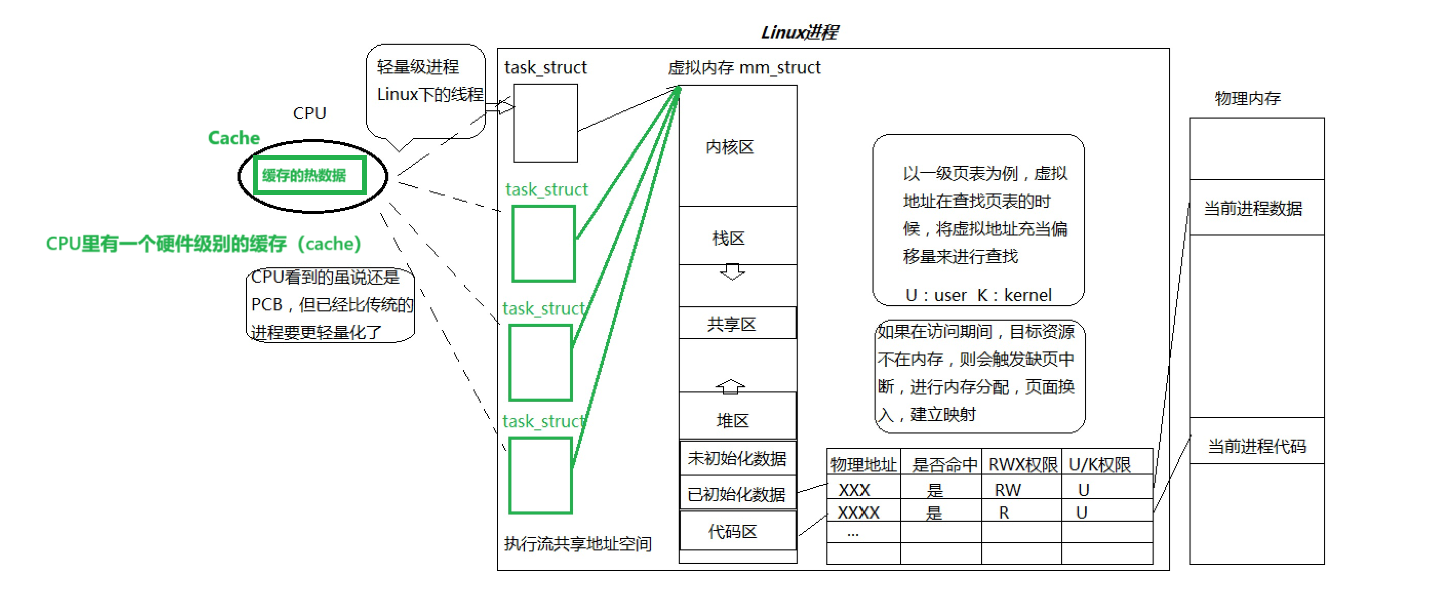
Linux多线程(二)之进程vs线程
文章目录 Linux进程VS线程进程和线程进程的多个线程共享关于进程线程的问题 重谈地址空间Linux线程周边的概念 Linux进程VS线程 进程和线程 进程是资源分配的基本单位(进程是承担分配系统资源的基本实体) 执行流也是资源!线程是进程内部的执…...

【MogDB】测试 ubuntu server 22.04 LTS 安装mogdb 5.0.11
测试 ubuntu server 22.04 LTS 安装mogdb 5.0.11 使用的操作系统镜像是 https://releases.ubuntu.com/22.04/ubuntu-22.04.5-live-server-amd64.iso 装好操作系统后,把root登录打开了,方便后续操作。 测试过程 使用官方命令在线安装ptk rootubuntu22…...
)
AI时代新词-数字孪生(Digital Twin)
一、什么是数字孪生(Digital Twin)? 数字孪生(Digital Twin)是一种通过创建物理实体的虚拟副本,并利用数据和算法来模拟、分析和优化物理实体的性能和行为的技术。数字孪生结合了物联网(IoT&am…...
【HW系列】—web常规漏洞(文件上传漏洞)
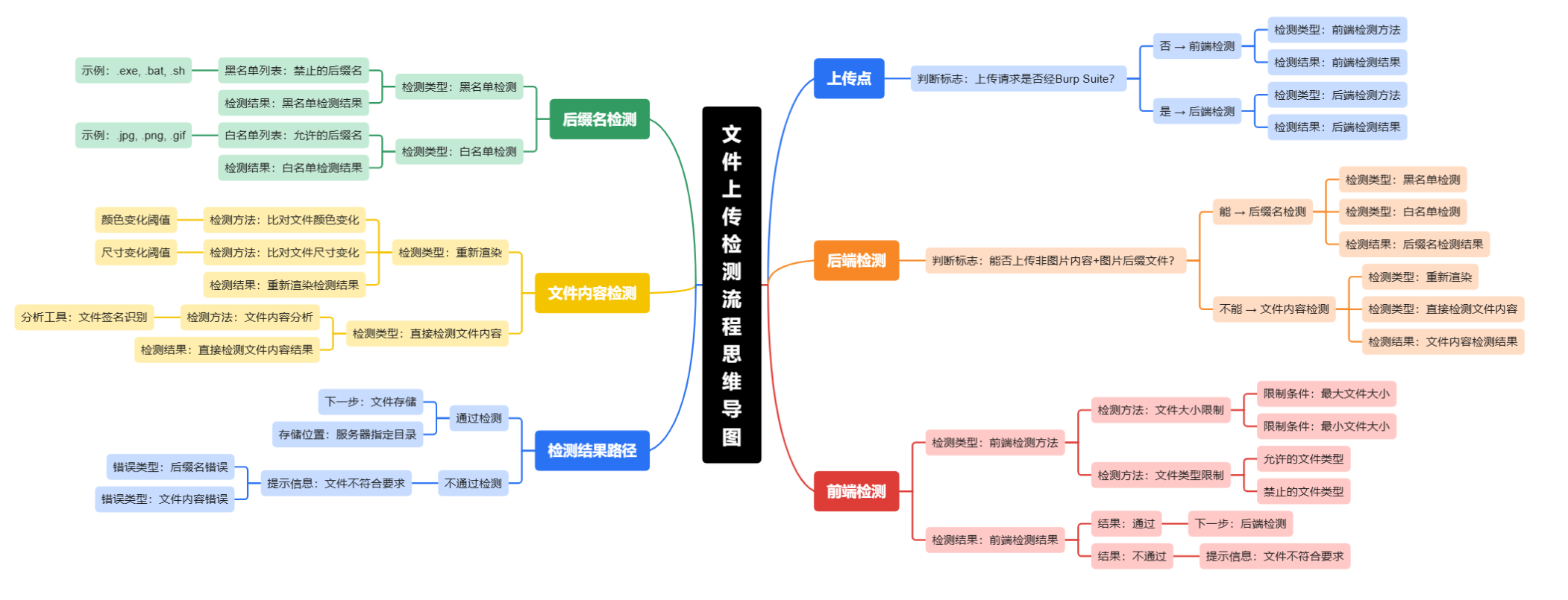
文章目录 一、简介二、危害三、文件检测方式分类四、判断文件检测方式五、文件上传绕过技术六、漏洞防御措施 一、简介 文件上传漏洞是指Web应用程序在处理用户上传文件时,未对文件类型、内容、路径等进行严格校验和限制,导致攻击者可上传恶意文件&…...
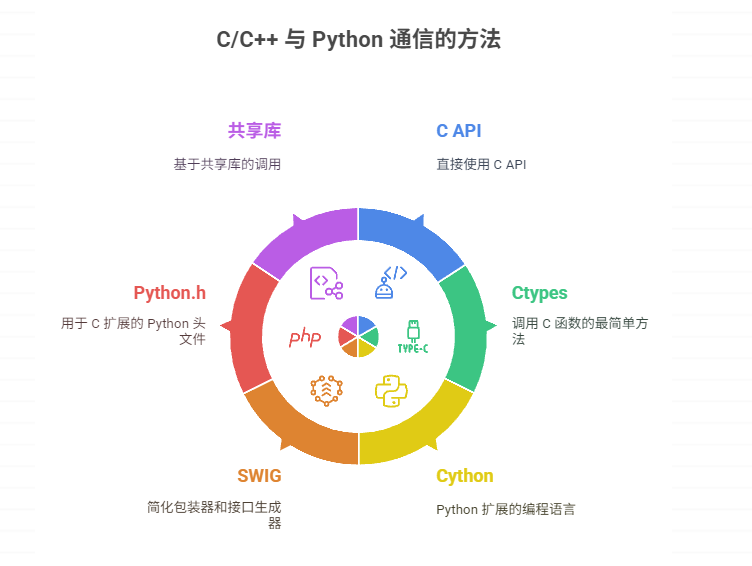
如何实现 C/C++ 与 Python 的通信
C/C 与 Python 的通信可以通过多种方式实现,如使用 C API、Ctypes、Cython、SWIG、Python.h 或基于共享库的调用等。其中,使用 Ctypes 方式最为简便,适合快速调用已有的 C 函数库。例如,通过将 C 代码编译为动态链接库(…...

python炸鱼船
import pygame, random # 加载库 from pygame.locals import * pygame.init() pygame.display.set_caption("炸渔船") canvas pygame.display.set_mode((700, 500)) bgpygame.image.load("bg.png") bgpygame.transform.scale(bg,(700,500))class Hero(py…...

使用AutoKeras2.0的AutoModel进行结构化数据回归预测
1、First of All: Read The Fucking Source Code import autokeras as ak import numpy as np from sklearn.model_selection import train_test_split from sklearn.metrics import mean_squared_error# 生成数据集 np.random.seed(42) x np.random.rand(1000, 10) # 生成1…...
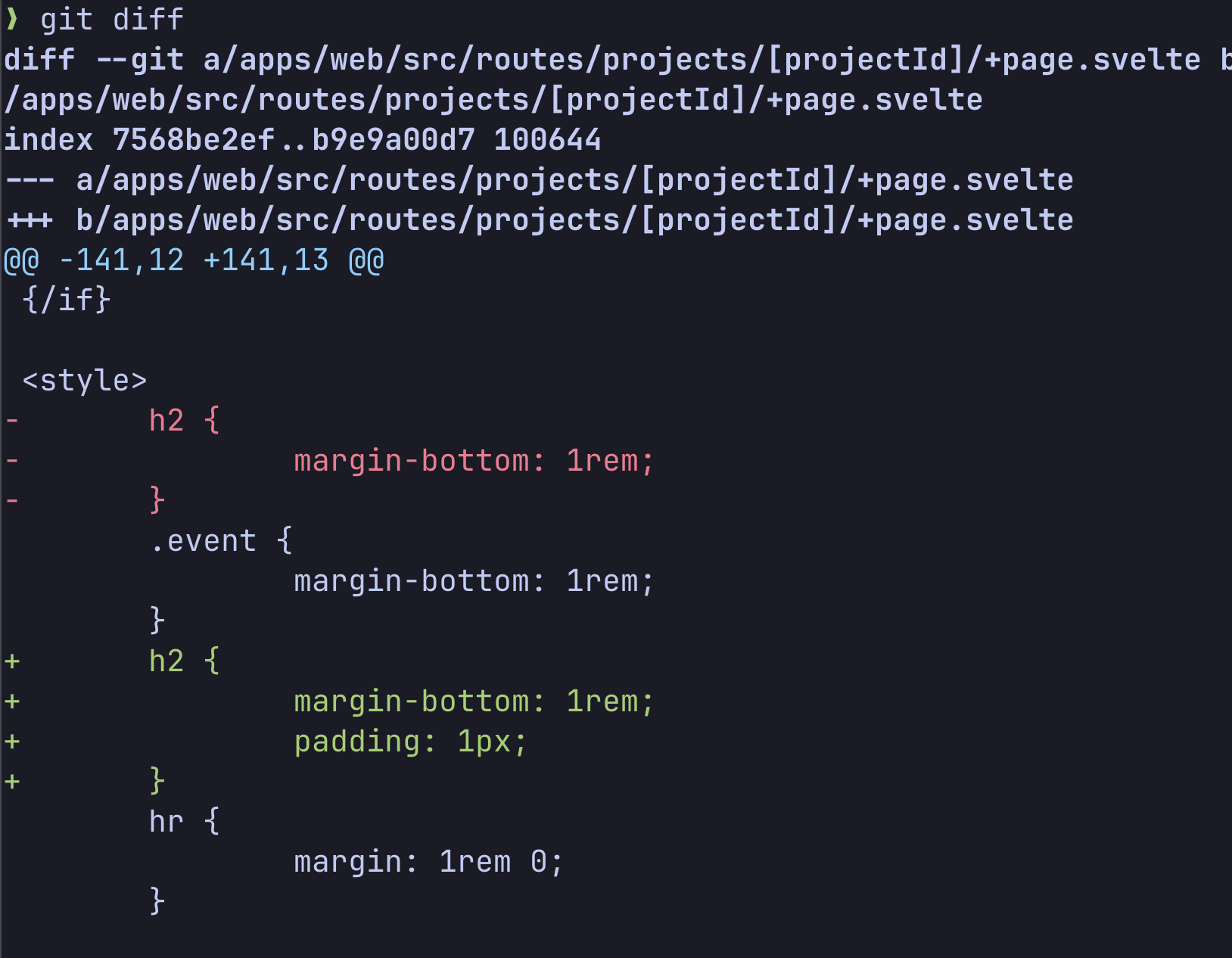
好用但不常用的Git配置
参考文章 文章目录 tag标签分支新仓库默认分支推送 代码合并冲突处理默认diff算法 tag标签 默认是以字母顺序排序,这会导致一些问题,比如0.5.101排在0.5.1000之后。为了解决这个问题,我们可以把默认排序改为数值排序 git config --global t…...
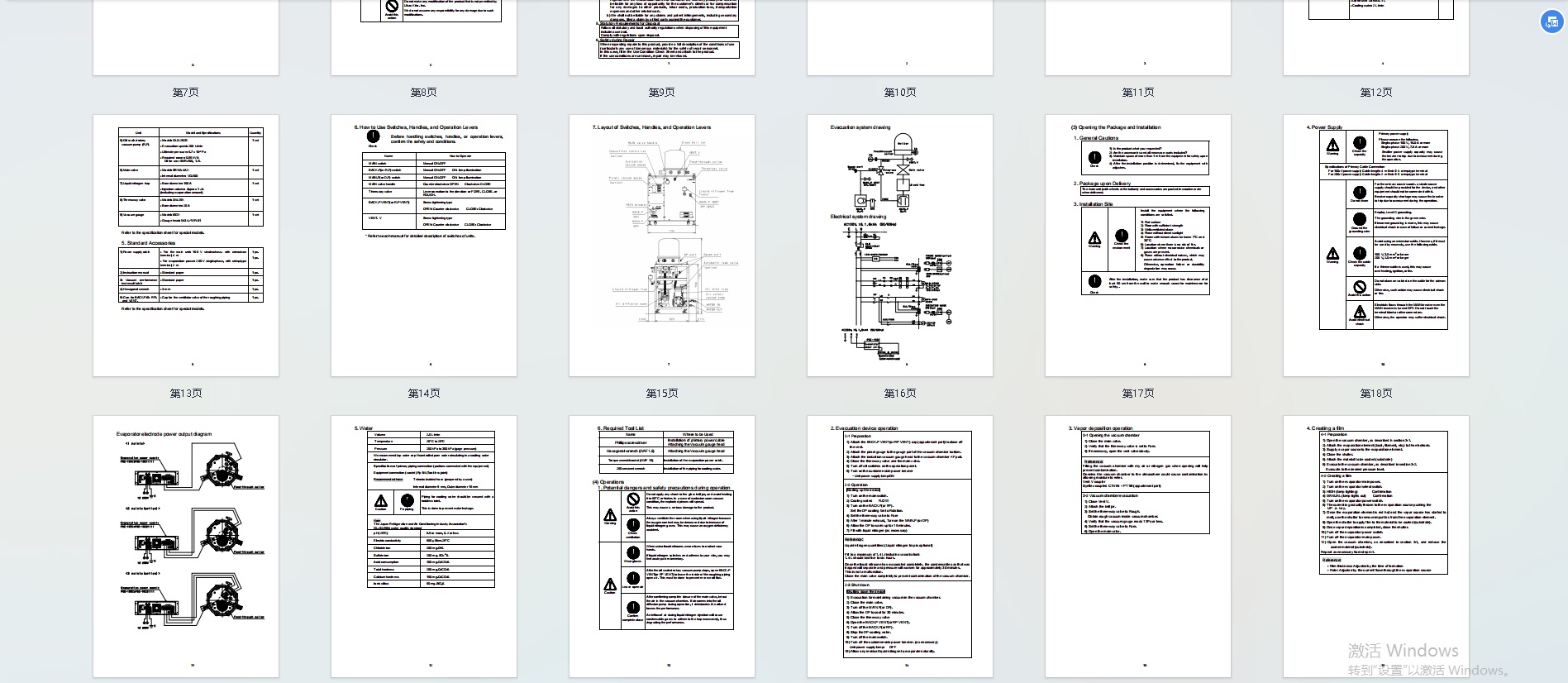
ULVAC VWR-400M/ERH 真空蒸发器 Compact Vacuum Evaporator DEPOX (VWR-400M/ERH)
ULVAC VWR-400M/ERH 真空蒸发器 Compact Vacuum Evaporator DEPOX (VWR-400M/ERH)...

P1068 [NOIP 2009 普及组] 分数线划定
题目描述 世博会志愿者的选拔工作正在 A 市如火如荼的进行。为了选拔最合适的人才,A 市对所有报名的选手进行了笔试,笔试分数达到面试分数线的选手方可进入面试。面试分数线根据计划录取人数的 150% 划定,即如果计划录取 m 名志愿者…...
PPT连同备注页(演讲者模式)一块转为PDF
首先,进入创建PDF/XPS: 然后进入选项: 发布选项-发布内容里选备注页: 导出的原始结果是这样的: 这个时候裁剪一下,范围为所有页面: 最终结果: 如果导出不选“备注页”而是只勾选“包…...

第三十二天打卡
作业:参考pdpbox官方文档中的其他类,绘制相应的图,任选即可 1. 安装并导入库 确保安装与文档版本一致的 pdpbox(此处以 0.3.0 为例): bash 复制 下载 pip install pdpbox0.3.0 导入所需库:…...

项目三 - 任务8:实现词频统计功能
本项目旨在实现一个词频统计功能,通过读取文本文件并利用Java编程技巧处理和分析文本数据。首先,使用BufferedReader逐行读取文件内容,然后通过String.split(" ")方法将每行文本分割成单词数组。接下来,采用HashMap来存…...

MongoDB 快速整合 SpringBoot 示例
1.添加依赖<dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-web</artifactId></dependency><dependency><groupId>org.springframework.boot</groupId><artifactId>spr…...

2025.05.22-得物春招机考真题解析-第二题
📌 点击直达笔试专栏 👉《大厂笔试突围》 💻 春秋招笔试突围在线OJ 👉 笔试突围OJ 02. 魔法书页重排 问题描述 A先生是一位魔法师,他有一本古老的魔法书,书中有 n n n 页,每页都刻有一个魔…...

ollama list模型列表获取 接口代码
ollama list模型列表获取 接口代码 curl http://localhost:11434/v1/modelscoding package hcx.ollama;/*** ClassName DockerOllamaList* Description TODO* Author dell* Date 2025/5/26 11:31* Version 1.0**/import java.io.BufferedReader; import java.io.InputStreamR…...
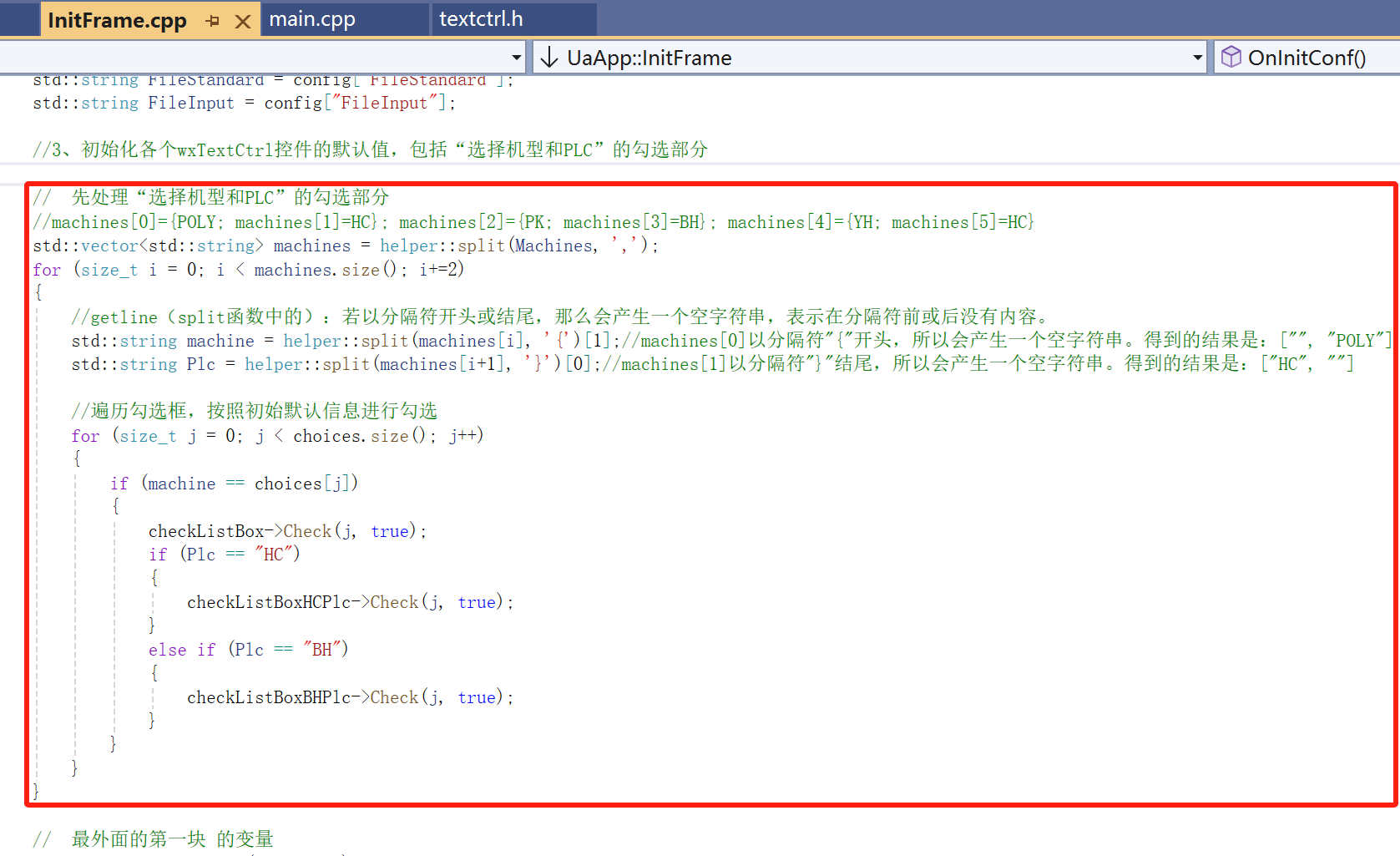
OPC Client第5讲(wxwidgets):初始界面的事件处理;按照配置文件初始化界面的内容
接上一讲,即实现下述界面的事件处理代码;并且按照配置文件初始化界面的内容(三、) 事件处理的基础知识,见下述链接五、 OPC Client第3讲(wxwidgets):wxFormBuilder;基础…...