《三维点如何映射到图像像素?——相机投影模型详解》
引言
以三维投影介绍大多比较分散,不少小伙伴再面对诸多的坐标系转换中容易弄混,特别是再写代码的时候可能搞错,所有这篇文章帮大家完整的梳理3D视觉中的投影变换的全流程,一文弄清楚这个过程,帮助大家搞清坐标系转换。
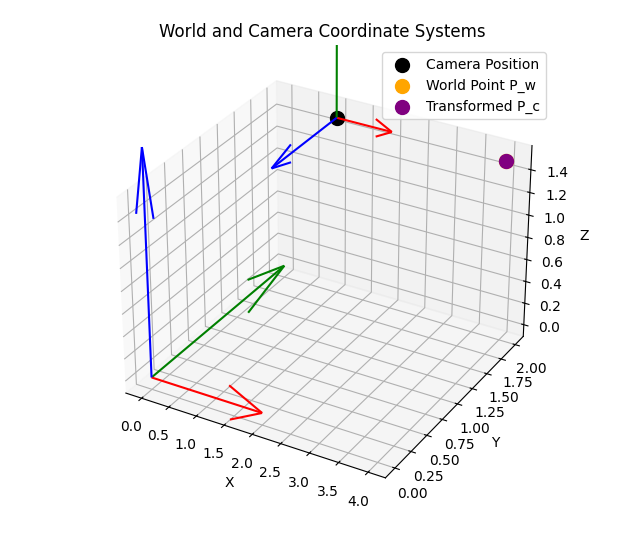
想象你正站在一个空房间里,脚下是地板,面前是墙。
- 在纸上画一个直角坐标系,标记原点为墙角(左下角),X向右,Y向前,Z向上。
- 相机位于[2, 4, 1.5]位置。
- 在[4, 2, 1.5]处点一个点——这是我们要投影到相机图像的三维点。
接下来,我会带你一步步推导:这个点如何变成相机照片中的一个像素。
第一章:从3D到2D的四大步骤
在计算机视觉和三维重建领域,将三维空间中的点映射到二维图像平面是相机成像过程的核心。这个过程可以抽象为一个投影模型(Projection Model),它描述了如何将真实世界中的点通过一系列变换最终落在图像传感器上,成为我们看到的像素点。
整个过程可以分为四个关键步骤:
步骤一:世界坐标系 → 相机坐标系(刚体变换)
三维空间中的点通常以**世界坐标系(World Coordinate System)表示,记为,为了模拟相机的视角,我们需要将其转换到相机坐标系(Camera Coordinate System)中。这一步是通过刚体变换(Rigid Transformation)**完成的,包括旋转和平移操作:
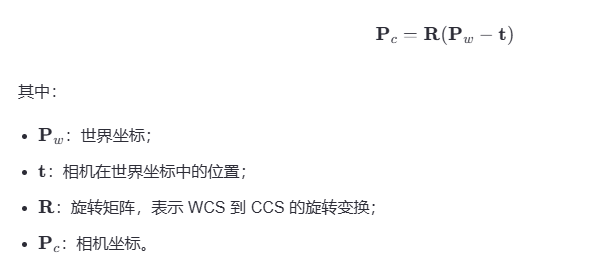
投影公式如下:
中:
R是旋转矩阵(3x3);t是平移向量(3x1);P_c是点在相机坐标系下的表示。
也可以用齐次坐标写成一个变换矩阵:
步骤二:相机坐标系 → 归一化图像坐标系(透视投影)
接下来,我们将三维相机坐标系中的点通过透视投影(Perspective Projection)映射到二维的归一化图像坐标系中。这一步模拟了光线穿过针孔相机的过程。
设相机焦距为 f,则投影公式如下:
这里的 (x, y) 表示归一化图像平面上的坐标,与实际像素无关。
步骤三:归一化图像坐标 → 像素坐标(内参变换)
为了得到最终的像素坐标,还需要考虑相机的内部参数,例如像素尺寸、主点偏移等。这些信息被包含在一个称为相机内参矩阵(Intrinsic Matrix)的矩阵中:
其中:
f_x,f_y是以像素为单位的焦距;(c_x, c_y)是图像主点(principal point),通常是图像中心。
于是,归一化坐标 (x, y) 到像素坐标 (u, v) 的变换为:
步骤四:像素坐标 → 图像坐标系(图像裁剪与翻转)
最后一步是将像素坐标 (u, v) 映射到图像的实际坐标系统中。通常图像坐标原点位于左上角,而之前计算的 (u, v) 是浮点数,需要进行取整或插值处理。
此外,还要注意图像可能会有缩放、裁剪、翻转等后处理操作,这会影响最终的像素位置。
第二章:从世界坐标系到相机坐标系的刚体变换详解
——坐标系定义、旋转矩阵与平移矩阵的构建全过程
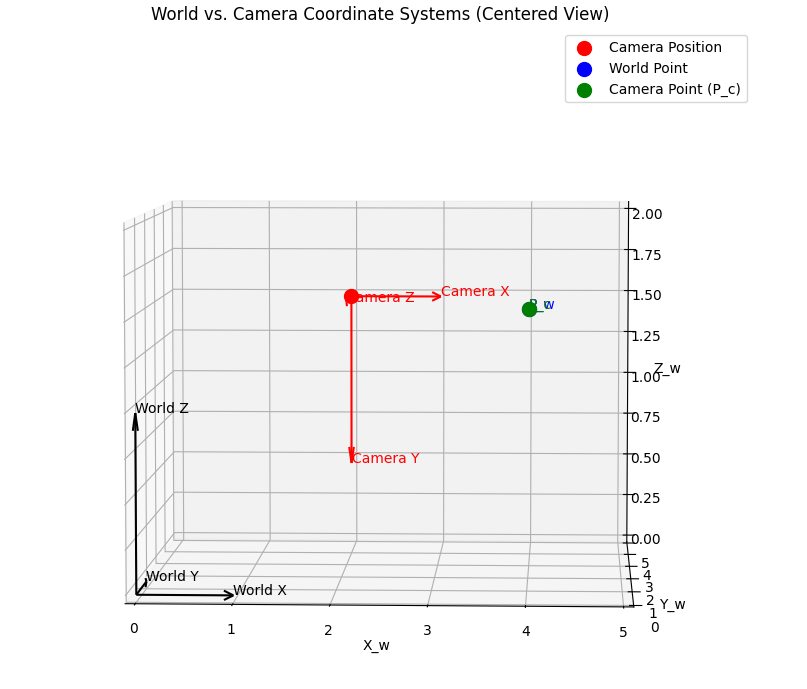
一、相机坐标系(CCS)的定义与物理意义
在计算机视觉中,相机坐标系(Camera Coordinate System, CCS) 是以相机为中心建立的右手坐标系。其定义如下:
- 原点(Oₐ):位于相机光心(光学中心);
- Z轴(Zₐ):指向相机拍摄方向(即光轴方向);
- X轴(Xₐ):指向图像右侧;
- Y轴(Yₐ):指向图像下方,满足右手系规则:Xₐ × Yₐ = Zₐ。
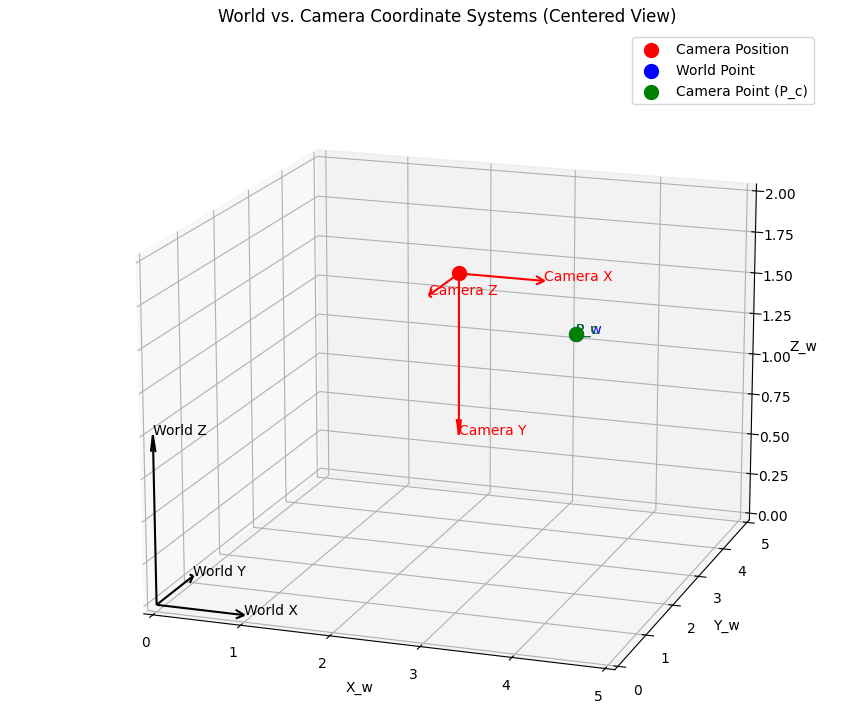
二、世界坐标系(WCS)与相机坐标系的关系
我们考虑一个具体例子:
- 世界坐标系(WCS):
- 原点位于房间角落;
- X轴向右;
- Y轴向前;
- Z轴向上。
- 相机位置:
- 在 WCS 中的位置为:t =[2, 4, 1.5]ᵀ;
- 表示相机在房间中位于 x=2, y=4, z=1.5 的位置(单位:米);
- 相机朝向:
- 光轴(Zₐ)指向 WCS 的 −Y 方向;
- 即相机背对世界前方(Y轴正方向),面朝后方。
这个设定常见于室内监控场景中,例如相机安装在房间中央,面朝墙壁。
三、刚体变换公式
将一个三维点 P_w 从世界坐标系转换到相机坐标系的过程如下:
四、分步构建变换过程
步骤 1:平移变换(Translation)
目标:将世界坐标点“移动”到以相机为原点的相对位置。
公式:
示例:
P_w = np.array([4, 2, 1.5]) # 修改后的世界点位置
t = np.array([2, 4, 1.5])
则:
物理意义:该点相对于相机的位置是向右 2 米、向前 -2 米、下方 0 米(相机没有旋转前)。
步骤 2:旋转变换(Rotation)
目标:将相对向量 PrelPrel 转换到相机坐标系的方向中去。
(1)确定相机坐标系的三个单位向量
根据设定,相机光轴指向 WCS 的 −Y 方向:
- Zₐ(光轴方向):[0, −1, 0]
- Xₐ(右侧方向):选择与 Zₐ 垂直的世界 X 轴方向:[1, 0, 0]
- Yₐ(下方方向):由叉积得到:Yₐ = Zₐ × Xₐ = [0, 0, −1]
这三个向量构成了相机坐标系的基底。
(2)构造旋转矩阵 R
将上述三个单位向量作为列向量,组成旋转矩阵:
解释每一列含义:
- 第1列:世界 X 轴在 CCS 中的方向;
- 第2列:世界 Y 轴在 CCS 中的方向;
- 第3列:世界 Z 轴在 CCS 中的方向。
五、完整变换计算
继续使用上面的例子:
import numpy as npP_w = np.array([2, 3, 0.5])
t = np.array([1, 2, 1.5])R = np.array([[1, 0, 0],[0, 0, -1],[0, -1, 0]
])P_rel = P_w - t
P_c = R @ P_rel结果:
解释:
- Xc = 2:点在相机右侧 2 米;
- Yc = 0:点在相机下方 0 米(Y轴向下);
- Zc = 2:点在相机前方2米。
六、为什么是 −Y 方向而不是 +Y?
这是由以下两个因素决定的:
1. 相机坐标系的定义要求
为了保持右手系结构(Xₐ × Yₐ = Zₐ),如果 Xₐ 对齐世界 X 轴、Yₐ 对齐世界 Z 轴,则 Zₐ 必须指向世界 −Y。
2. 图像坐标系的一致性
在图像坐标系中,通常定义:
- u 轴(列)向右;
- v 轴(行)向下;
这与相机坐标系中 Yₐ 向下一致,因此相机朝向 −Y 可以自然地映射到图像平面。
第三章:旋转矩阵 R 的数学构建与相机坐标系的构建原理详解
在第二章中,我们已经介绍了如何从世界坐标系(WCS)到相机坐标系(CCS)进行刚体变换,并通过一个具体示例演示了平移和旋转的具体计算过程。本章将深入讲解旋转矩阵 R 的数学构造方法、其物理意义以及相机坐标系构建背后的几何逻辑。
一、旋转矩阵 R 的数学定义与性质
1.1 基本定义
旋转矩阵是一个 3×3 的正交矩阵,满足以下两个重要性质:
- 正交性
- 行列式为 1:
这两个条件保证了旋转操作只改变方向而不改变长度或形状。
1.2 旋转矩阵的列向量解释
设世界坐标系中的三个标准基向量为:
而相机坐标系的三个单位基向量为:
则旋转矩阵 R 可以表示为:
换句话说,旋转矩阵的每一列是相机坐标系在世界坐标系下的方向向量。
✅ 通俗理解:旋转矩阵 R 描述了“世界坐标轴在相机坐标系中的方向”。
1.3 构造 R 的通用步骤
步骤 1:确定相机光轴方向(Zₐ)
这是最重要的一步,决定了相机的拍摄方向。例如:
- 若希望相机朝向世界 −Y 方向,则:
- 若希望相机朝向世界 +Z 方向,则:
步骤 2:选择 Xₐ 向量(与 Zₐ 垂直)
通常优先对齐世界坐标系中的某个轴(如 X 轴),但必须确保与 Zₐ 垂直:
- 设定:
- 或者使用 Gram-Schmidt 正交化法调整方向。
步骤 3:由叉积得到 Yₐ 向量
根据右手系规则
这确保了整个坐标系保持右手结构。
步骤 4:归一化所有向量
确保每个向量都是单位向量:
步骤 5:构造旋转矩阵 R
将三个单位向量作为列向量排列成矩阵:
二、相机坐标系为什么这么构建?
相机坐标系的设计并不是随意的,而是为了满足以下几个关键目标:
2.1 图像坐标的自然映射
图像坐标系通常定义如下:
- u 轴(列方向)→ 相机右侧;
- v 轴(行方向)→ 相机下方;
- 原点位于图像左上角。
因此,相机坐标系的 Xₐ 向右、Yₐ 向下可以自然地映射到图像坐标。
2.2 保持右手系结构
三维空间建模和渲染中广泛使用右手系,这样便于统一处理旋转、投影等操作。如果 Yₐ 指向上方,则会导致图像坐标的行方向与 Yₐ 方向相反,增加转换复杂度。
2.3 简化后续投影模型
相机坐标系的 Zₐ 轴指向拍摄方向,使得后续的透视投影公式简洁且直观:
其中 f 是焦距。
三、构建相机坐标系的完整数学流程示例
假设:
- 相机位置:t=[1,2,1.5]T,表示相机在世界坐标系中的位置为 x=1, y=2, z=1.5。
- 相机光轴指向:世界 −Y 方向(即面朝房间后方)。
步骤 1:确定 Zₐ
Zₐ 是相机坐标系的 Z 轴方向,表示相机的拍摄方向。在这个例子中
✅ 相机朝向世界 −Y 方向,因此:
这是单位向量,无需归一化。
📌 注意:Zₐ 并不是相机的位置向量,而是指向相机“看的方向”。在这里,“看向 −Y”意味着相机背对世界 +Y 轴。
步骤 2:确定 Xₐ
Xₐ 应该与 Zₐ 垂直,并且尽可能与世界坐标系的某个轴对齐(通常选 X 或 Y),以便简化后续计算和理解。
在这个例子中,我们可以选择:
因为:
- 它是单位向量;
- 与 Zₐ 垂直(点积为零):
步骤 3:由叉积得 Yₐ
步骤 4:归一化各向量(此处已是单位向量)
步骤 5:构造旋转矩阵 R
第四章:相机坐标系 → 归一化图像坐标系(透视投影)
在第三章中,我们完成了从世界坐标系到相机坐标系的变换,即通过旋转和平移将一个点 PwPw 转换为相机坐标 Pc=[Xc,Yc,Zc]TPc=[Xc,Yc,Zc]T。
本章将继续这一流程,介绍如何将三维空间中的点 投影到二维归一化图像平面,完成:
从 相机坐标系(CCS) 到 归一化图像坐标系(Normalized Image Coordinates) 的变换。
一、什么是归一化图像坐标?
归一化图像坐标是针孔相机模型下的中间图像坐标系统。它是一个无单位的二维坐标系,原点位于图像中心,Z 轴与相机光轴重合。
它的定义如下:
设相机焦距为 f,则对于相机坐标系下的点 Pc=[Xc,Yc,Zc]T,其对应的归一化图像坐标 (x,y)为:
这个过程称为透视投影(Perspective Projection),它模拟了真实相机成像的基本原理 —— 远小近大。
✅ 注意:这里的 (x,y)是归一化的坐标,还没有考虑图像分辨率、主点偏移等参数。这是后续章节会讨论的内容。
二、沿用之前的示例进行推导
示例设定:
- 相机位置:
- 旋转矩阵:
- 焦距: f=1
该旋转矩阵表示相机的光轴指向世界 −Z 方向(向下看),Yₐ 向下,Xₐ 向右。
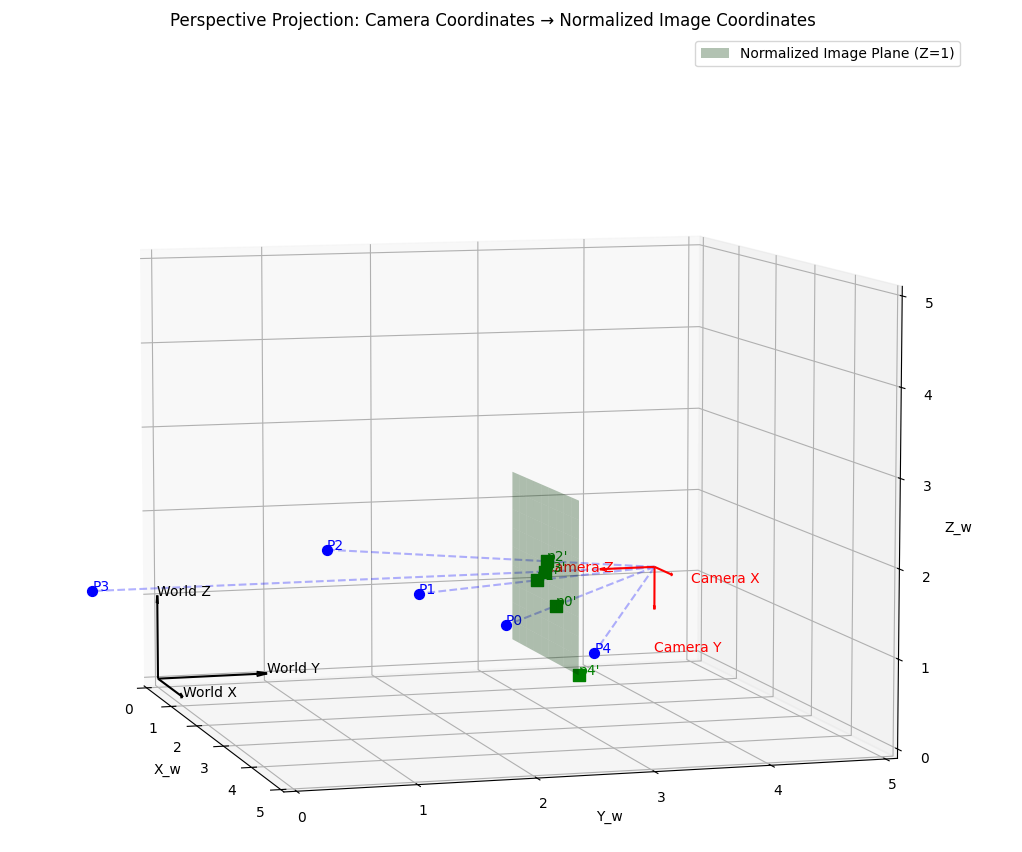
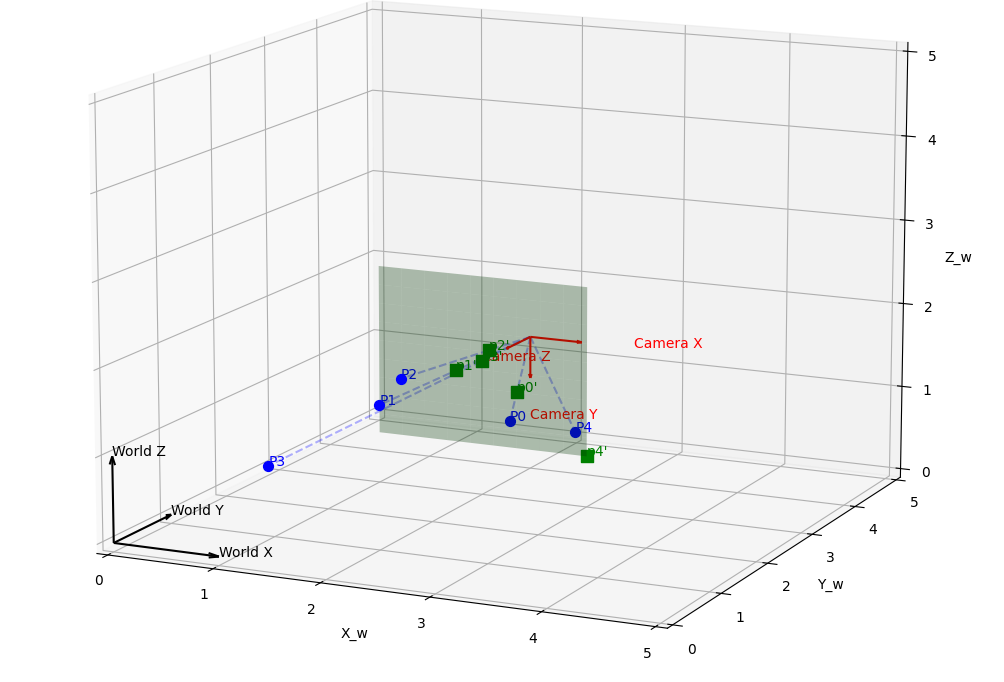
举例说明:选取几个3D点进行投影
我们在相机坐标系中选取了五个点,它们分别是:
| 点编号 | X_c | Y_c | Z_c |
|---|---|---|---|
| P0 | 0.5 | 0.5 | 1.5 |
| P1 | -0.5 | 0.3 | 2 |
| P2 | 0.2 | -0.4 | 3 |
| P3 | 0 | 0 | 5 |
| P4 | 0.8 | 0.8 | 0.8 |
这些点都位于相机前方(Zₐ > 0),因此可以被正确投影到图像平面上。
投影计算示例(以 P0 为例)
对于点 P0:
Xc=0.5,Yc=0.5,Zc=1.5
代入公式得:
所以归一化图像坐标为:
类似地,我们可以计算其他点的归一化图像坐标。
投影结果汇总(部分)
| 点编号 | X_c | Y_c | Z_c | x | y |
|---|---|---|---|---|---|
| P0 | 0.5 | 0.5 | 1.5 | 0.333 | 0.333 |
| P1 | -0.5 | 0.3 | 2 | -0.25 | 0.15 |
| P2 | 0.2 | -0.4 | 3 | 0.067 | -0.133 |
| P3 | 0 | 0 | 5 | 0 | 0 |
| P4 | 0.8 | 0.8 | 0.8 | 1.0 | 1.0 |
可以看到,随着 Z 值变小(靠近相机),投影点变得更大;而远离相机的点(如 P3)则更接近图像中心。
三、物理意义解释
| 参数 | 数值范围 | 物理意义 |
|---|---|---|
| Z_c > 0 | 所有点都在相机前方 | 可以被正常投影到图像上 |
| Z_c < 0 | 未出现在示例中 | 表示点在相机背后,不会出现在图像中 |
| Z_c = 0 | 未出现 | 表示点在相机正前方无穷远处,无法投影 |
| x/y 接近 0 | 如 P3 | 表示点位于图像中心附近 |
| x/y 绝对值较大 | 如 P4 | 表示点靠近图像边缘或超出视野 |
四、注意事项
- 当 Zc=0时,表示点在相机正前方无穷远处,无法投影;
- 当 Zc<0时,点在相机背后,不会出现在图像中;
- 实际图像坐标还需结合内参矩阵(焦距、主点、畸变)进一步映射;
- 本章只讨论理想情况下的归一化图像坐标。
第五章:归一化图像坐标 → 像素坐标(内参变换)
在第四章中,我们完成了从相机坐标系到归一化图像坐标系的投影过程,得到了一个无单位的二维坐标 (x,y)。
本章将介绍如何将这个归一化图像坐标进一步转换为像素坐标 (u,v),这一步是通过引入**相机内参矩阵(Intrinsic Camera Matrix)**来实现的。
一、什么是相机内参矩阵?
相机内参矩阵 KK 是一个 3×3的上三角矩阵,它包含了以下物理参数:
| 参数 | 物理意义 |
|---|---|
| fx,fy | 焦距(以像素为单位),通常 fx=fy=f,但在非正方形像素时可以不同 |
| cx,cy | 主点(Principal Point),即图像中心在像素坐标中的位置(通常为图像分辨率的一半) |
| s | 图像的斜切因子(Skew Factor),表示像素是否正交排列,默认为 0 |
完整的相机内参矩阵形式如下:
实际使用中,大多数情况下 s=0s=0,所以常简化为:
二、归一化图像坐标 → 像素坐标的公式
设归一化图像坐标为 (x,y),则对应的像素坐标 (u,v)可由下式计算:
展开后得到:
这个过程称为 “内参变换”,它不依赖于相机的位置或朝向,只与相机本身的成像特性有关。
三、延续最开始的例子进行推导
示例设定:
- 相机位置:
- 点的世界坐标:
- 旋转矩阵(沿用之前例子):
步骤 1:计算相机坐标
先求相对坐标:
再应用旋转:
所以:
步骤 2:透视投影(归一化图像坐标)
焦距设为 f=200
所以归一化图像坐标为:
步骤 3:假设一个内参矩阵
设相机分辨率为 640×480,则主点为:
构建内参矩阵:
步骤 4:计算像素坐标
代入公式:
所以最终像素坐标为:
✅ 注意事项
- 若像素坐标超出图像范围则该点不在图像视野范围内;
- 调整焦距 ff或相机姿态可以改变点是否出现在图像中;
- 如果 Zc<0,即使计算出像素坐标也无法显示,因为该点在相机背后。
四、参数总结与物理意义
| 参数 | 单位 | 物理意义 |
|---|---|---|
| ff(焦距) | 像素 | 控制图像放大倍数,越大视角越小,物体显得更大 |
| cx,cycx,cy | 像素 | 主点偏移量,通常是图像中心,控制图像原点位置 |
| Xc,Yc,ZcXc,Yc,Zc | 米或任意单位 | 点在相机坐标系下的三维坐标 |
| x,y | 无量纲 | 归一化图像坐标,反映点相对于图像中心的位置 |
| u,v | 像素 | 最终图像坐标,可用于绘制或识别目标位置 |
第六章:更复杂的案例 —— 相机与世界坐标系存在夹角(完整流程详解)
在本章中,我们将以一个更复杂的案例为例,详细推导从世界坐标 → 像素坐标的完整变换流程。这个案例的特点是:
✅ 相机姿态不平行于世界坐标轴 —— 即相机与世界坐标系之间存在夹角。
🎯 示例设定
1. 点的世界坐标:
P_w = np.array([4, 2, 1.5])表示某个物体在世界坐标中的位置。
2. 相机参数
(1)相机位置(平移向量):
t = np.array([2, 4, 1.5])相机位于世界坐标系中的 (2, 4, 1.5) 位置。
(2)原始旋转矩阵(将世界坐标转换为相机坐标):
R_original = np.array([[1, 0, 0],[0, 0, -1],[0, -1, 0]
])3. 新增旋转:绕相机 Yₐ 轴向右旋转 30°
我们希望让相机绕其自身的 Z轴偏转 30°(X->Y),从而看到右侧空间。
在三维空间中,绕 Y 轴 旋转一个角度 θ 的标准旋转矩阵为:
物理意义:
- 表示绕 Y 轴旋转角度 θ;
- 相当于“转头”动作:向左或向右看;
- X 和 Z 坐标发生变化,Y 不变
绕 X 轴旋转(Pitch)一个角度 θ 的标准旋转矩阵为:
物理意义:
- 表示绕 X 轴旋转角度 θ;
- 相当于“点头”动作:向上或向下看;
- Y 和 Z 坐标发生变化,X 不变。
绕 Z 轴旋转(Roll)一个角度 θ 的标准旋转矩阵为:
物理意义:
- 表示绕 Y 轴旋转角度 θ;
- 相当于“转头”动作:向左或向右看;
- X 和 Z 坐标发生变化,Y 不变。
构造绕相机 zₐ 轴的旋转矩阵:
theta = np.radians(30)
R_y_camera = np.array([[np.cos(theta), -np.sin(theta), 0],[np.sin(theta), np.cos(theta), 0],[0, 0, 1]
])代入数值近似为:
array([[ 0.8660254, -0.5 , 0. ],[ 0.5 , 0.8660254, 0. ],[ 0. , 0. , 1. ]])4. 新的旋转矩阵(合成后的相机姿态)
我们将新增的局部旋转应用到原旋转上,得到新的整体旋转矩阵,实际应该过程中,会很容易忽略掉原始相机坐标系R_original从而导致出错:
R_new = R_y_camera @ R_original代入计算得:
array([[ 0.8660254, 0. , 0.5 ],[ 0.5 , 0. , -0.8660254],[ 0. , -1. , 0. ]])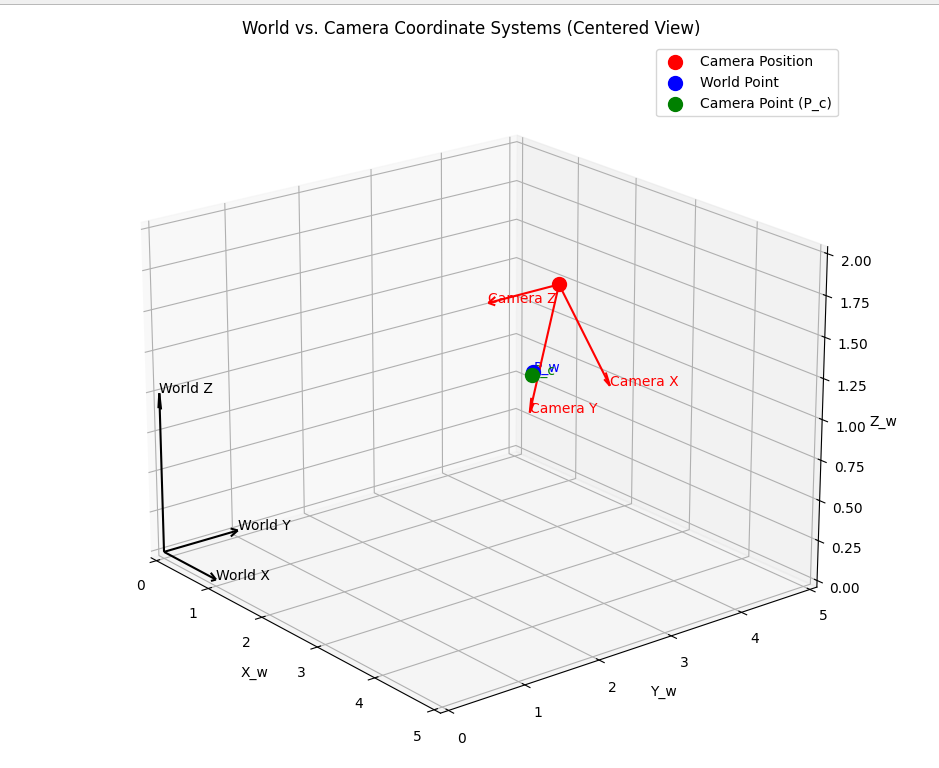
🔁 完整变换流程(公式代码格式)
✅ 步骤 1:世界坐标 → 相机坐标
代入数值:
P_rel = P_w - t
P_c = R_new @ P_rel结果为:
p_c = array([1.73205081, 1. , 2. ])即:
X_w = np.array([1, 0, 0]) # 世界X轴
Y_w = np.array([0, 1, 0]) # 世界Y轴
Z_w = np.array([0, 0, 1]) # 世界Z轴t = np.array([2, 4, 1.5]) # 新相机位置(Y值更大,更靠后)
P_w = np.array([4, 2, 1.5])
# 旋转矩阵(光轴 Z_c = -Y_w)
R = np.array([[1, 0,0],[0, 0, -1],[0, -1, 0]
])theta = np.radians(30)
R_z = np.array([[np.cos(theta), -np.sin(theta), 0],[np.sin(theta), np.cos(theta), 0],[0, 0, 1]
])R = R_z @ R# 转换到相机坐标系
P_c = R @ (P_w - t) ✅ 步骤 2:透视投影(相机坐标 → 归一化图像坐标)
设焦距 f=200:
归一化图像坐标为:
(x, y) = (718, 0)✅ 步骤 3:应用内参矩阵(归一化图像坐标 → 像素坐标)
设相机分辨率为 640×480,则主点为:
内参矩阵为:
像素坐标为:
最终像素坐标为:
相关文章:
《三维点如何映射到图像像素?——相机投影模型详解》
引言 以三维投影介绍大多比较分散,不少小伙伴再面对诸多的坐标系转换中容易弄混,特别是再写代码的时候可能搞错,所有这篇文章帮大家完整的梳理3D视觉中的投影变换的全流程,一文弄清楚这个过程,帮助大家搞清坐标系转换…...

Go 语言范围循环变量重用问题与 VSCode 调试解决方法
文章目录 问题描述问题原因1. Go 1.21 及更早版本的范围循环行为2. Go 1.22 的改进3. VSCode 调试中的问题4. 命令行 dlv debug 的正确输出 三种解决方法1. 启用 Go 模块2. 优化 VSCode 调试配置3. 修改代码以确保兼容性4. 清理缓存5. 验证环境 验证结果结论 在 Go 编程中&…...

青少年编程与数学 02-020 C#程序设计基础 04课题、常量和变量
青少年编程与数学 02-020 C#程序设计基础 04课题、常量和变量 一、主函数1. 主函数的基本格式2. 主函数的参数3. 主函数的返回值4. 主函数的作用5. 主函数的示例6. 主函数的注意事项 二、变量1. 变量的声明示例 2. 变量的初始化声明时初始化声明后赋值 3. 变量的类型3.1 值类型…...
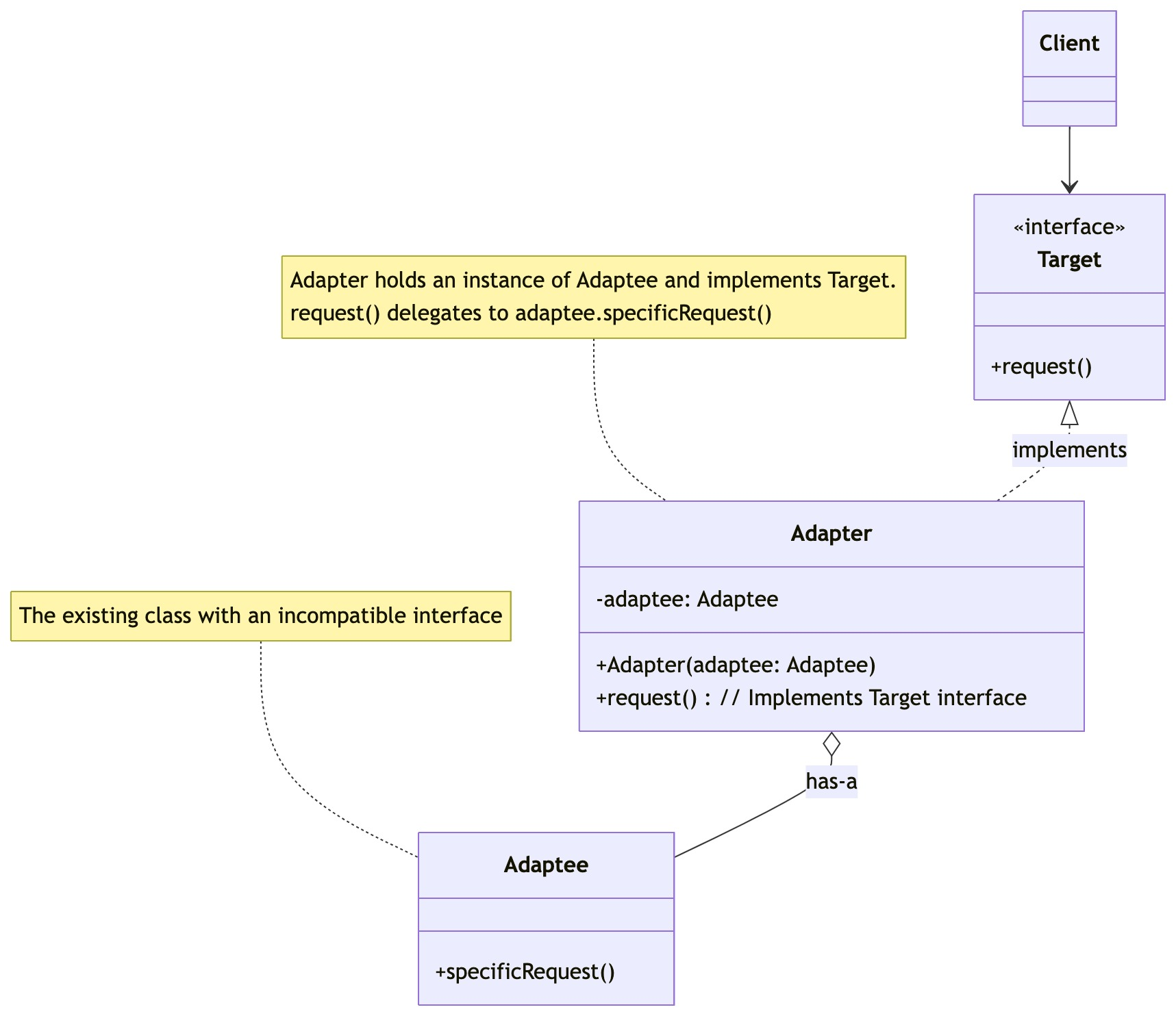
零基础设计模式——结构型模式 - 适配器模式
第三部分:结构型模式 - 适配器模式 (Adapter Pattern) 欢迎来到结构型模式的第一站!结构型模式关注的是如何将类或对象组合成更大的结构,同时保持结构的灵活性和效率。适配器模式是其中非常实用的一个,它能帮助我们解决接口不兼容…...

【QT】TXT文件的基础操作
目录 一、QT删除TXT文件内容 方法1:使用QFile打开文件并截断 方法2:使用QSaveFile(更安全的写入方式) 方法3:使用QTextStream 使用示例 注意事项 二、QT操作TXT文件:清空内容并写入新数据 完整实现代…...
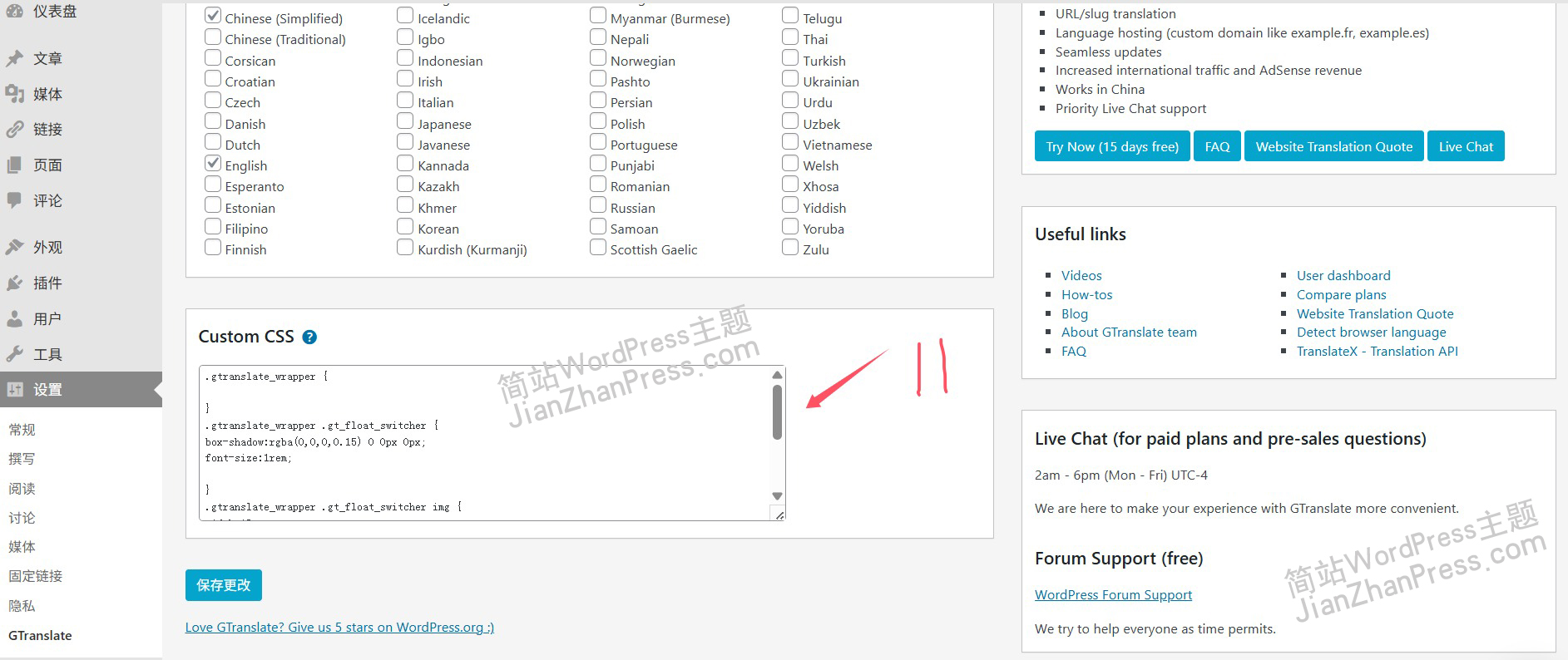
WordPress多语言插件安装与使用教程
WordPress多语言插件GTranslate的使用方法 在wordpress网站后台搜索多语言插件GTranslate并安装,安装完成、用户插件后开始设置,以下为设置方法: 1、先在后台左侧找到Gtranslate,进入到设置界面 2、选择要显示的形式,…...

互联网大厂Java求职面试:短视频平台大规模实时互动系统架构设计
互联网大厂Java求职面试:短视频平台大规模实时互动系统架构设计 面试背景介绍 技术总监(严肃脸): 欢迎来到我们今天的模拟面试,我是技术部的李总监,负责平台后端架构和高可用系统设计。今天我们将围绕一个…...

欣佰特科技|SenseGlove Nova2 力反馈数据手套:助力外科手术训练的精准触觉模拟
在医疗科技持续发展的背景下,虚拟现实(VR)技术正在改变外科手术培训的方式,而 SenseGlove Nova2 力反馈数据手套 在这一领域发挥着重要作用。 SenseGlove Nova2 力反馈数据手套 与 VirtualiSurg 手术模拟系统深度结合。其手部追踪…...

Axure元件动作七:移动、旋转、启用/禁用效果、置于顶层/底层详解
亲爱的小伙伴,在您浏览之前,烦请关注一下,在此深表感谢!如有帮助请订阅专栏! Axure产品经理精品视频课已登录CSDN可点击学习https://edu.csdn.net/course/detail/40420 案例视频: Axure移动、旋转、置于顶层底层、启用禁用 课程主题:移动、旋转、启用/禁用效果、置于顶…...
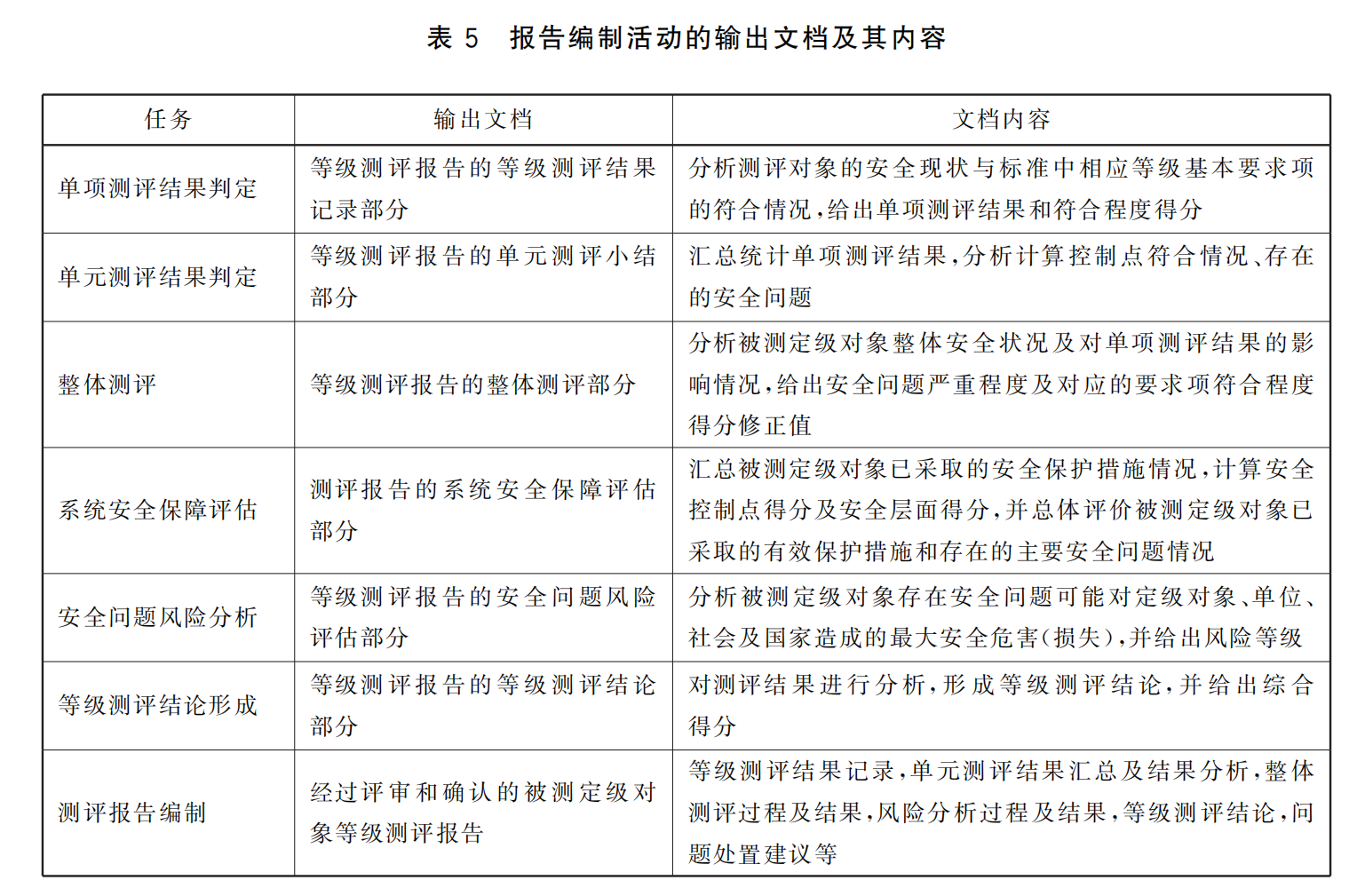
网络安全-等级保护(等保) 3-2-2 GB/T 28449-2019 第7章 现场测评活动/第8章 报告编制活动
################################################################################ GB/T 28449-2019《信息安全技术 网络安全等级保护测评过程指南》是规定了等级测评过程,是纵向的流程,包括:四个基本测评活动:测评准备活动、方案编制活…...

Flutter跨平台通信实战|3步打通Android原生能力,实现底层API调用!
当你的Flutter应用需要调用Android独有的硬件能力(如传感器、蓝牙模块)或系统级API时,如何与原生平台"对话"?本文手把手教你通过MethodChannel实现双向通信,让Flutter轻松驾驭Android底层能力! 一…...

IAM角色访问AWS RDS For MySQL
IAM角色访问AWS RDS For MySQL Tips: 写这篇文章,主要是用作记录;在AWS配置IAM RDS 角色权限访问,官方文档不怎么全,踩了一些坑… AWS云上配置 开启IAM身份验证 登录AWS控制台搜索并进入Databases管理页面选择数据库实例&#x…...

android property 系统
1.使用目的 目的都是为了测试。 减少编译流程。提高测试效率 2.使用方法流程 2.1 初始化默认值 方法一. 配置文件进行配置。 方法二. 手动初始化 setprop test.prop.id 12.2 获取键值并 property_get2.3 配置头文件 <cutils/properties.h>3.注意事项 3.1 关于无法…...
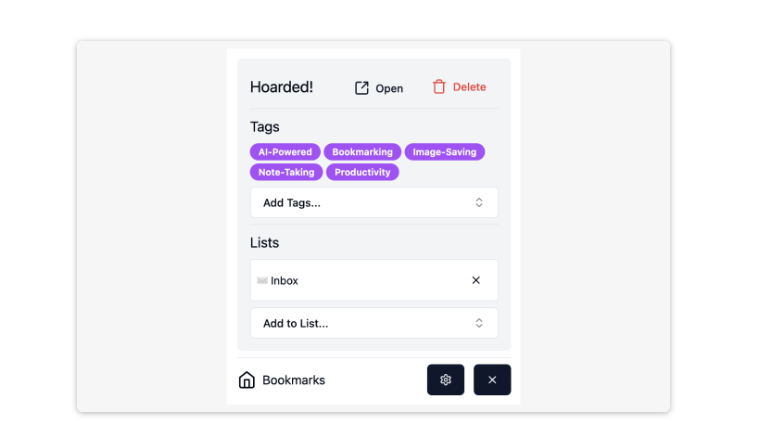
Karakeep | 支持Docker/NAS 私有化部署!稍后阅读工具告别云端依赖,让知识收藏更有序
Karakeep 介绍 Karakeep(以前的 Hoarder)是一款开源的“Bookmark Everything”应用程序,一款基于 AI 驱动的开源书签管理工具,专为解决传统浏览器书签管理中的混乱问题而设计。其核心目标是通过智能化技术帮助用户高效整理、检索和…...
RV1126+FFMPEG多路码流监控项目大体讲解
一.项目介绍: 本项目采用的是易百纳RV1126开发板和CMOS摄像头,使用的推流框架是FFMPEG开源项目。这个项目的工作流程如下(如上图):通过采集摄像头的VI模块,再通过硬件编码VENC模块进行H264/H265的编码压缩,并把压缩后的…...
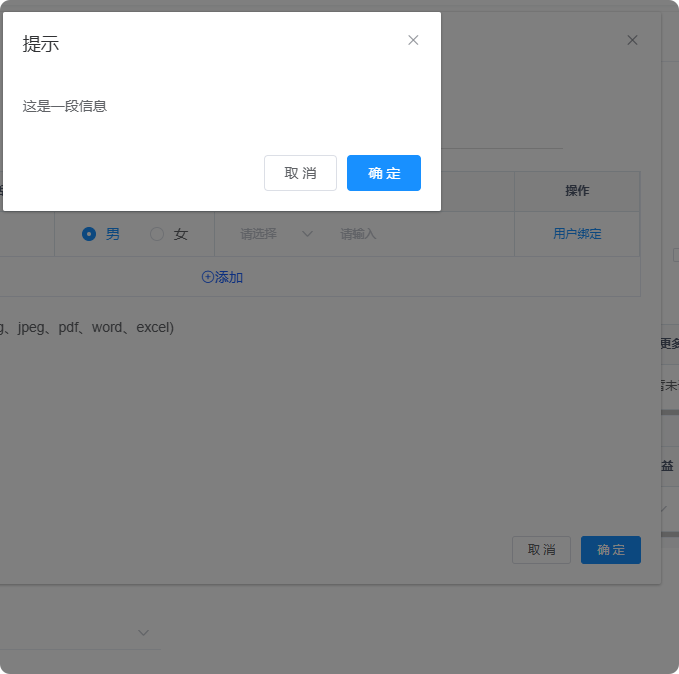
el-dialog 组件 多层嵌套 被遮罩问题
<el-dialog title"提示" :visible.sync"dialogBindUserVisible" width"30%" append-to-body :before-close"handleClose"> <span>这是一段信息</span> <span slot"footer" class"dialog-footer&q…...

探秘谷歌Gemini:开启人工智能新纪元
一、引言 在人工智能的浩瀚星空中,每一次重大模型的发布都宛如一颗璀璨新星闪耀登场,而谷歌 Gemini 的亮相,无疑是其中最为耀眼的时刻之一。它的出现,犹如在 AI 领域投下了一颗重磅炸弹,引发了全球范围内的广泛关注与热…...

TCP建立连接为什么不是两次握手,而是三次,为什么不能在第二次握手时就建立连接?
一.无法确认客户端的接收能力 三次握手的核心目的是为了确认客户端和服务端双方的发送和接收能力: 确保双方都能成功发送和接收数据。 如果C端发送数据到S端,S端收到数据,则可以确认S端具备正常的接收能力;如果C端发送出去的请求被…...

《Stable Diffusion 3.0企业级落地指南》——技术赋能与商业价值的深度融合实践
Stable Diffusion 3.0(SD3)作为当前多模态生成式AI技术的集大成者,凭借其创新的扩散Transformer架构(DiT)、流匹配(Flow Matching)技术以及超分辨率生成能力,正在重塑企业内容生产的…...

【软考向】Chapter 3 数据结构
线性结构线性表顺序存储 —— 访问易,增删难链式存储 —— 访问难、增删易栈 —— 后进先出 和 队列 —— 先进先出字符串 —— KMP 匹配算法数组、矩阵和广义表数组树 —— 树根为第一层,最大层数为树高/深度,度线索二叉树哈夫曼编码树和森林 —— 树的双亲表示和孩子表示图…...
(The Probability Lifesaver)(P14): 推导计算 In(1-u) 约等于 -u)
[原创](计算机数学)(The Probability Lifesaver)(P14): 推导计算 In(1-u) 约等于 -u
[作者] 常用网名: 猪头三 出生日期: 1981.XX.XX 企鹅交流: 643439947 个人网站: 80x86汇编小站 编程生涯: 2001年~至今[共24年] 职业生涯: 22年 开发语言: C/C++、80x86ASM、Object Pascal、Objective-C、C#、R、Python、PHP、Perl、 开发工具: Visual Studio、Delphi、XCode、…...
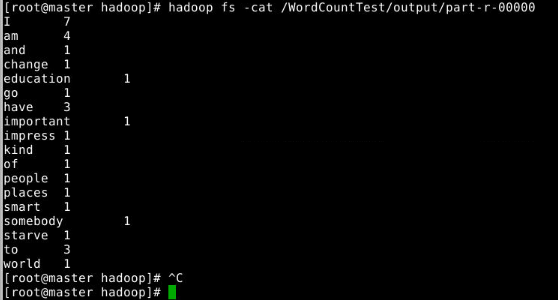
wordcount在集群上的测试
1.将louts.txt文件从cg计算机复制到master节点上面,存放在/usr/local/hadoop 需要输入密码:83953588abc scp /root/IdeaProjects/mapReduceTest/lotus.txt root172.18.0.2:/usr/local/hadoop /WordCountTest/input 2.将lotus.txt文件从master这台机器…...
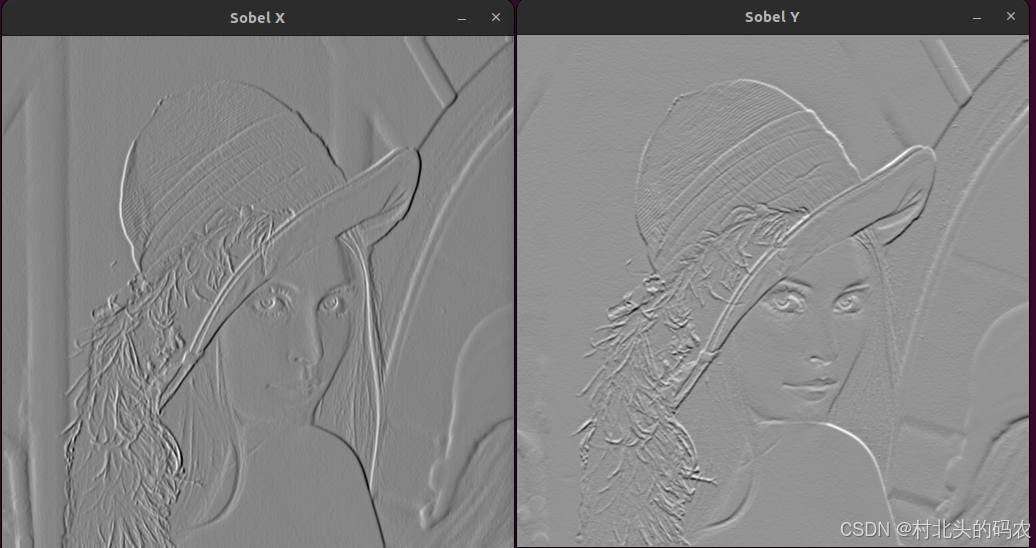
OpenCV CUDA模块图像过滤------创建一个 Sobel 滤波器函数createSobelFilter()
操作系统:ubuntu22.04 OpenCV版本:OpenCV4.9 IDE:Visual Studio Code 编程语言:C11 算法描述 该函数用于创建一个 Sobel 滤波器,用于在 GPU 上进行边缘检测。它基于图像的梯度计算: dx 表示对 x 方向求导的阶数&…...

[面试精选] 0053. 最大子数组和
文章目录 1. 题目链接2. 题目描述3. 题目示例4. 解题思路5. 题解代码6. 复杂度分析 1. 题目链接 53. 最大子数组和 - 力扣(LeetCode) 2. 题目描述 给你一个整数数组 nums ,请你找出一个具有最大和的连续子数组(子数组最少包含一…...

怎么判断一个Android APP使用了Cordova这个跨端框架
要判断一个 Android 应用是否使用了 Cordova 框架,可以通过以下方法逐步验证: 一、安装包结构分析 1. 解压 APK 将 .apk 文件重命名为 .zip 并解压,检查以下特征文件: • assets/www/ 目录: Cordova 的核心 Web 资源&…...
PDF 转 JPG 图片小工具:CodeBuddy 助力解决转换痛点
本文所使用的 CodeBuddy 免费下载链接:腾讯云代码助手 CodeBuddy - AI 时代的智能编程伙伴 前言 在数字化办公与内容创作的浪潮中,将 PDF 文件转换为 JPG 图片格式的需求日益频繁。无论是学术文献中的图表提取,还是宣传资料的视觉化呈现&am…...

VisionPro 与 C# 联合编程:相机连接实战指南
在工业视觉检测与自动化领域,康耐视(Cognex)的 VisionPro 是一款功能强大的视觉开发工具,而 C# 凭借其简洁性与高效性,成为许多开发者的首选编程语言。本文将详细介绍如何通过 C# 与 VisionPro 联合编程实现相机连接&a…...

鸿蒙OSUniApp 实现动态的 tab 切换效果#三方框架 #Uniapp
使用 UniApp 实现动态的 tab 切换效果 在移动应用开发中,tab 切换(标签页)是提升界面组织性和用户体验的常用交互方式。无论是资讯、商城、社区还是管理后台,tab 组件都能帮助用户高效切换不同内容区域。随着 HarmonyOSÿ…...
:深度剖析Dockerfile与图形化容器实战 --- 3种容器构建方法对比与性能调优)
Docker系列(三):深度剖析Dockerfile与图形化容器实战 --- 3种容器构建方法对比与性能调优
引言 在云原生技术驱动软件交付革新的当下,Dockerfile 作为容器化技术的核心载体,通过声明式语法将应用环境固化为可复现、可版本化的“蓝图”,彻底终结了“开发-生产”环境割裂的顽疾。本文以 Ubuntu 24.04 LTS 为实践基础,深度…...
论文阅读:Next-Generation Database Interfaces:A Survey of LLM-based Text-to-SQL
地址:Next-Generation Database Interfaces: A Survey of LLM-based Text-to-SQL 摘要 由于用户问题理解、数据库模式解析和 SQL 生成的复杂性,从用户自然语言问题生成准确 SQL(Text-to-SQL)仍是一项长期挑战。传统的 Text-to-SQ…...