LearnOpenGL-笔记-其十一
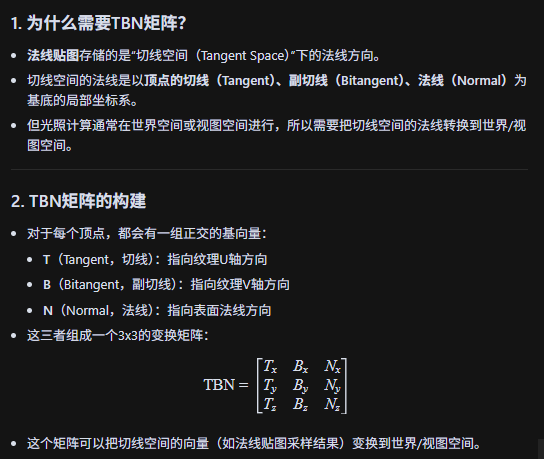
Normal Mapping
又到了介绍法线贴图的地方,我感觉我已经写了很多遍了...
法线贴图用最简单的话来介绍的话,就是通过修改贴图对应物体表面的法线来修改光照效果,从而在不修改物体实际几何形状的前提下实现不同于物体几何形状的视觉效果。
因此对于法线贴图来说,最重要的内容就是去修改法线贴图对于物体表面的法线。
vec3 normal = texture(normalMap, TexCoords).rgb;normal = normalize(normal * 2.0 - 1.0);normal = normalize(TBN * normal);这是我们在物体的片元着色器实现的内容,就是根据法线贴图的内容更换法线。
在这里我们不妨回顾一下法线贴图的原理:
法线贴图的“蓝色”就代表“正对表面外”,红色/绿色代表“沿U/V方向偏转”,整个流程无非就是:法线贴图以RGB值来记录对法线方向的干扰,这个干扰是在切线空间中进行的,我们还需要TBN矩阵——这个工具来将变换后的法线映射回世界坐标系中。
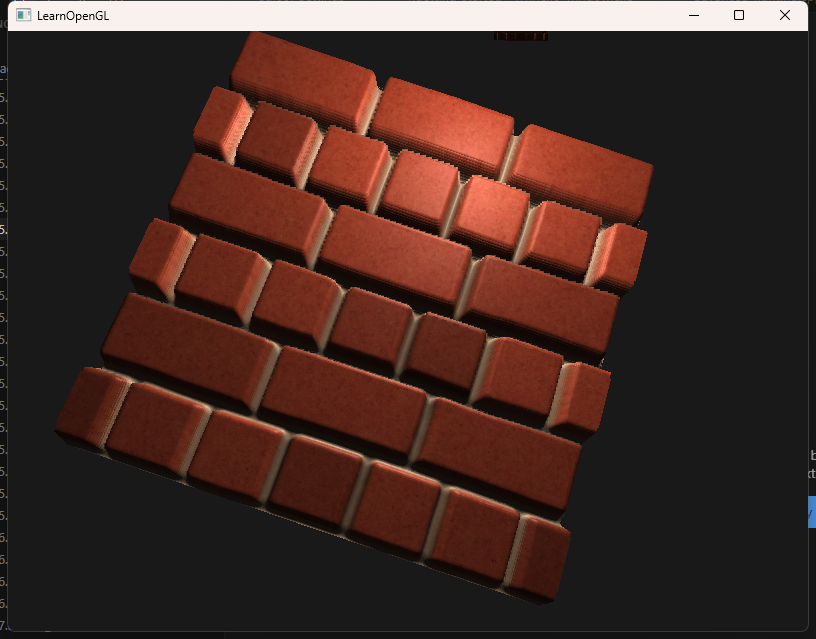
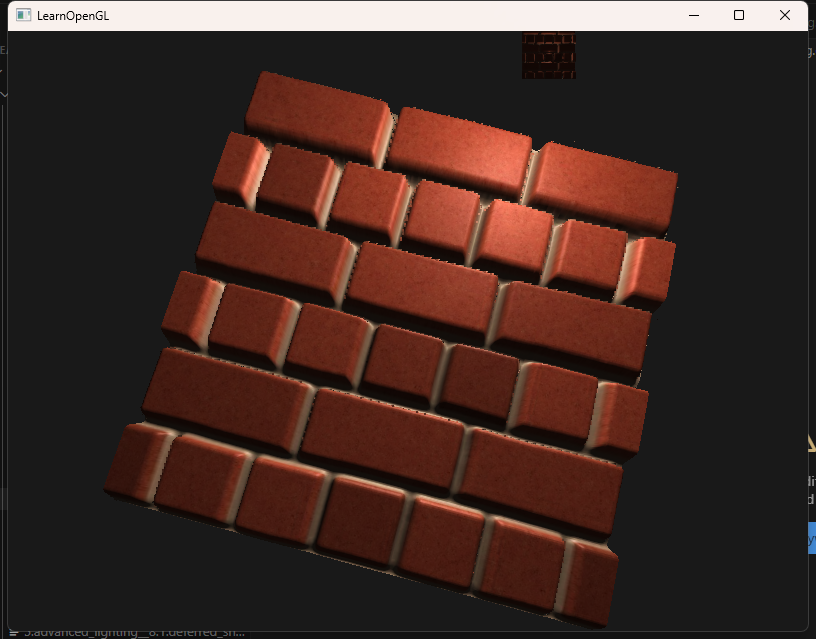
效果如图:
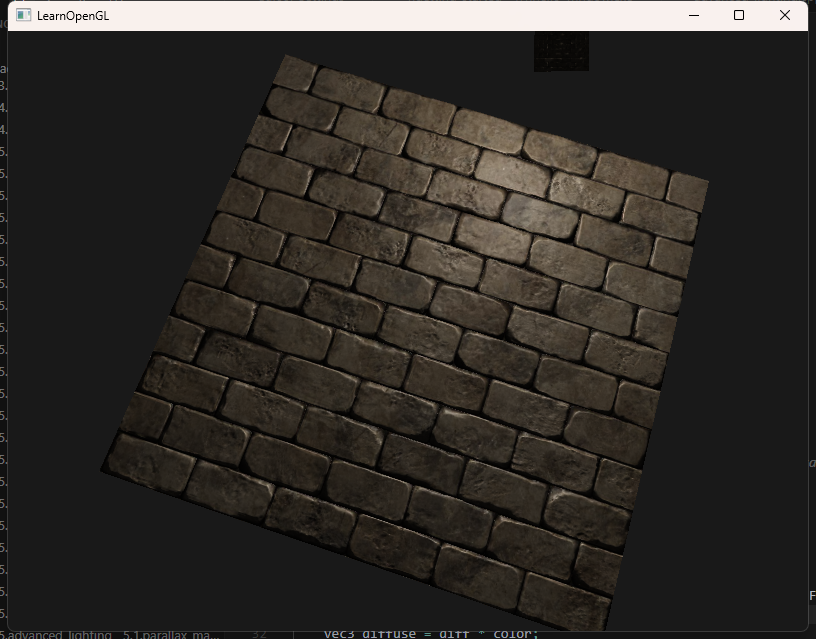
看起来确实有凹凸不平的质感——但其实,这只是薄薄的一个平面生成的效果。
Parallax Mapping
视差贴图和法线贴图类似也是也是不改变物体实际几何形状的前提下去修改视觉效果,可是和法线贴图直接去修改法线方向不同,视差贴图通过动态偏移纹理坐标实现高度不同的视觉效果。
vec2 ParallaxMapping(vec2 texCoords, vec3 viewDir)
{ float height = texture(depthMap, texCoords).r; return texCoords - viewDir.xy * (height * heightScale);
}void main()
{ // offset texture coordinates with Parallax Mappingvec3 viewDir = normalize(fs_in.TangentViewPos - fs_in.TangentFragPos);vec2 texCoords = fs_in.TexCoords;texCoords = ParallaxMapping(fs_in.TexCoords, viewDir); if(texCoords.x > 1.0 || texCoords.y > 1.0 || texCoords.x < 0.0 || texCoords.y < 0.0)discard;// obtain normal from normal mapvec3 normal = texture(normalMap, texCoords).rgb;normal = normalize(normal * 2.0 - 1.0); // get diffuse colorvec3 color = texture(diffuseMap, texCoords).rgb;// ambientvec3 ambient = 0.1 * color;// diffusevec3 lightDir = normalize(fs_in.TangentLightPos - fs_in.TangentFragPos);float diff = max(dot(lightDir, normal), 0.0);vec3 diffuse = diff * color;// specular vec3 reflectDir = reflect(-lightDir, normal);vec3 halfwayDir = normalize(lightDir + viewDir); float spec = pow(max(dot(normal, halfwayDir), 0.0), 32.0);vec3 specular = vec3(0.2) * spec;FragColor = vec4(ambient + diffuse + specular, 1.0);
}可以看到我们的视差贴图会根据深度贴图的R值来修改原来纹理坐标,在片元着色器的执行流程中,我们的纹理会根据视线方向来动态地调整根据深度贴图的R值修改过的纹理坐标,从而达到视觉落差的效果。
说起来当然很简单,但是其背后的工作原理呢?
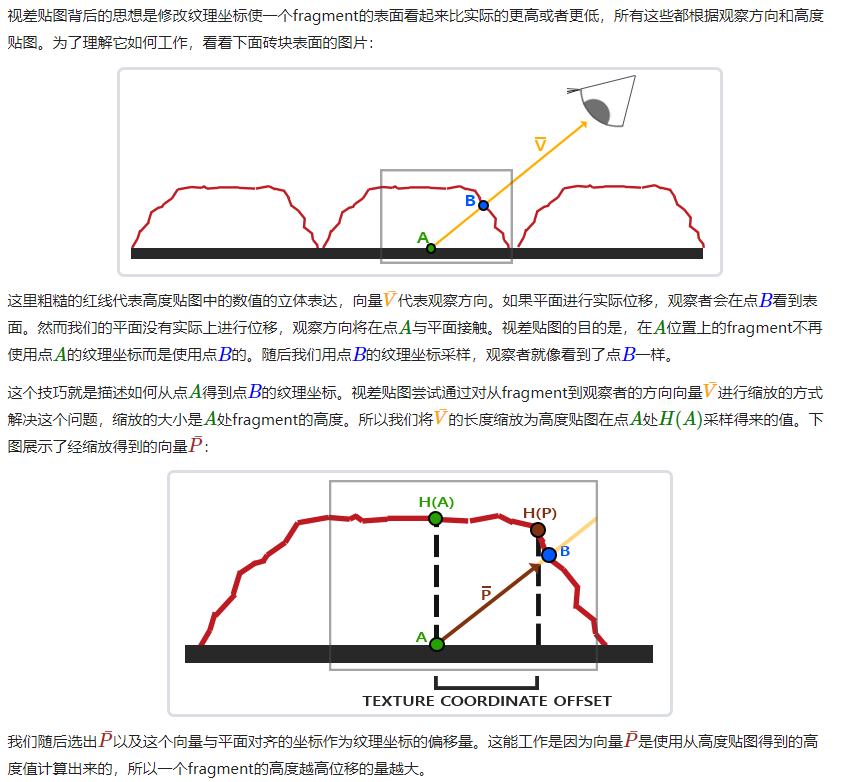
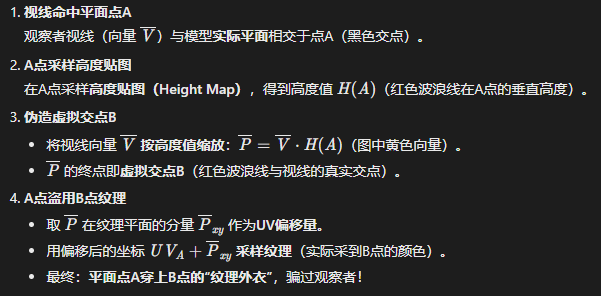
移花接木,狸猫换太子,卧槽这个视差贴图怎么这么坏啊。 用比较简单的话来说就是:首先我们的视线看向这个片元时,视线真正与物体表面的交点在A点,但是我们在A点的着色渲染成B点的颜色的话,不就实现了纹理坐标的偏移,从而实现视觉落差的效果了。这个B点是怎么得到的呢?就是根据我们的视差贴图修改该片元的高度值后与视线相交得到的。
陡峭视差映射(Steep Parallax Mapping)是视差映射的扩展,原则是一样的,但不是使用一个样本而是多个样本来确定向量。即使在陡峭的高度变化的情况下,它也能得到更好的结果,原因在于该技术通过增加采样的数量提高了精确性。
陡峭视差映射的基本思想是将总深度范围划分为同一个深度/高度的多个层。从每个层中我们沿着向量方向移动采样纹理坐标,直到我们找到一个采样低于当前层的深度值。
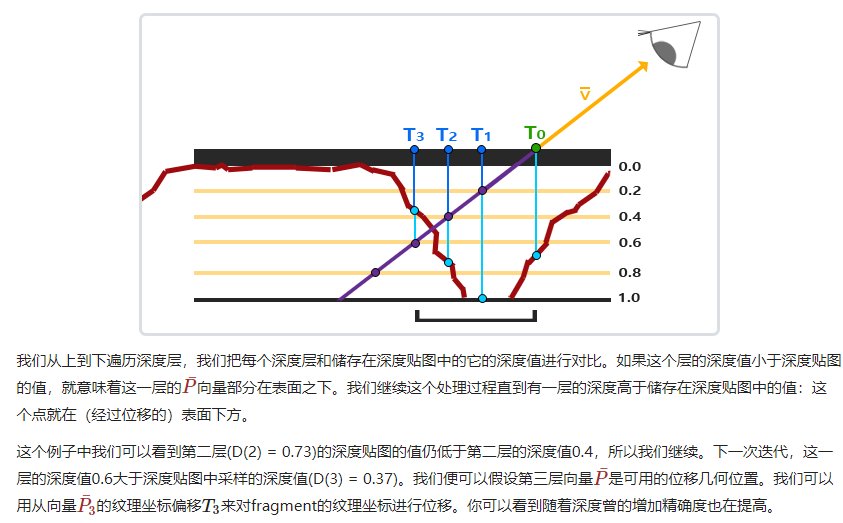
其实就是我们多很多个深度层,然后将视线和这些深度层的交点与深度贴图的深度值一一比较,找到第一个符合深度贴图的深度大于交点深度值的深度层,把这个深度层与视线的交点对于的深度值作为我们的纹理颜色渲染对象即可。
代码上这样改动:
vec2 ParallaxMapping(vec2 texCoords, vec3 viewDir)
{ // number of depth layersconst float minLayers = 8;const float maxLayers = 32;float numLayers = mix(maxLayers, minLayers, abs(dot(vec3(0.0, 0.0, 1.0), viewDir))); // calculate the size of each layerfloat layerDepth = 1.0 / numLayers;// depth of current layerfloat currentLayerDepth = 0.0;// the amount to shift the texture coordinates per layer (from vector P)vec2 P = viewDir.xy / viewDir.z * heightScale; vec2 deltaTexCoords = P / numLayers;// get initial valuesvec2 currentTexCoords = texCoords;float currentDepthMapValue = texture(depthMap, currentTexCoords).r;while(currentLayerDepth < currentDepthMapValue){// shift texture coordinates along direction of PcurrentTexCoords -= deltaTexCoords;// get depthmap value at current texture coordinatescurrentDepthMapValue = texture(depthMap, currentTexCoords).r; // get depth of next layercurrentLayerDepth += layerDepth; }return currentTexCoords;
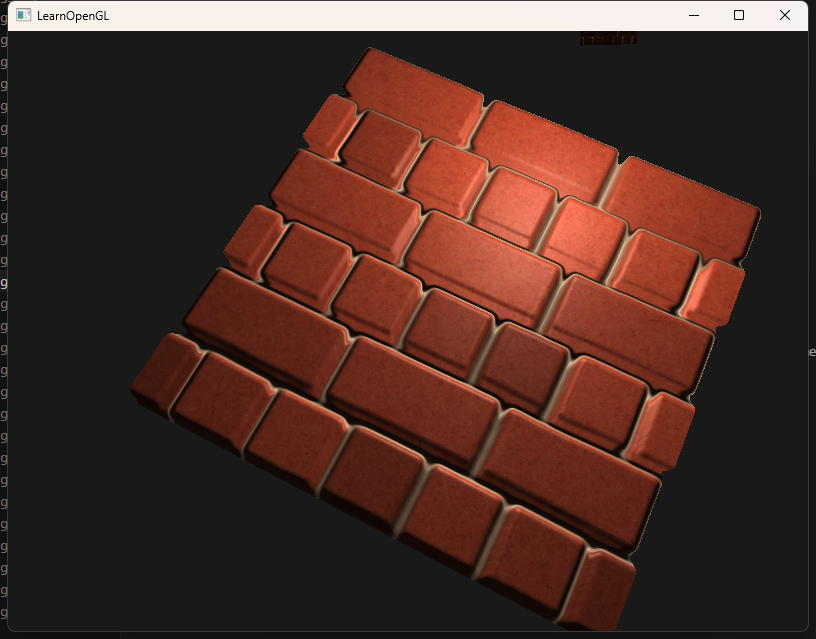
}效果如图:
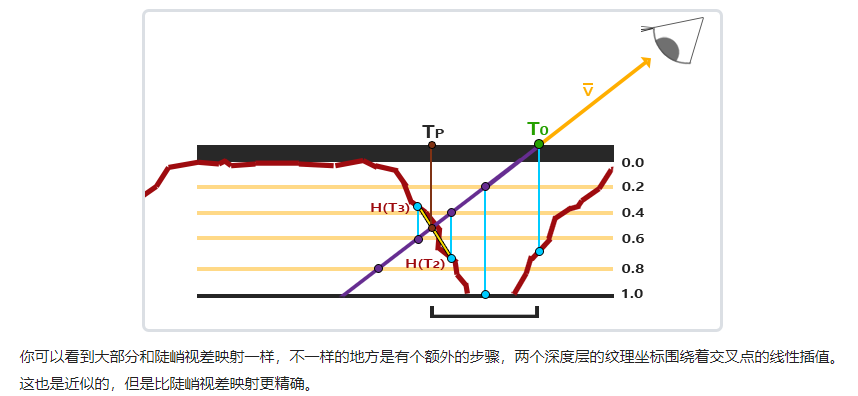
在这个基础上可以实现效果更好的视差遮蔽映射(Parallax Occlusion Mapping),只需要多加一个线性插值的操作即可。
vec2 ParallaxMapping(vec2 texCoords, vec3 viewDir)
{ // number of depth layersconst float minLayers = 8;const float maxLayers = 32;float numLayers = mix(maxLayers, minLayers, abs(dot(vec3(0.0, 0.0, 1.0), viewDir))); // calculate the size of each layerfloat layerDepth = 1.0 / numLayers;// depth of current layerfloat currentLayerDepth = 0.0;// the amount to shift the texture coordinates per layer (from vector P)vec2 P = viewDir.xy / viewDir.z * heightScale; vec2 deltaTexCoords = P / numLayers;// get initial valuesvec2 currentTexCoords = texCoords;float currentDepthMapValue = texture(depthMap, currentTexCoords).r;while(currentLayerDepth < currentDepthMapValue){// shift texture coordinates along direction of PcurrentTexCoords -= deltaTexCoords;// get depthmap value at current texture coordinatescurrentDepthMapValue = texture(depthMap, currentTexCoords).r; // get depth of next layercurrentLayerDepth += layerDepth; }// get texture coordinates before collision (reverse operations)vec2 prevTexCoords = currentTexCoords + deltaTexCoords;// get depth after and before collision for linear interpolationfloat afterDepth = currentDepthMapValue - currentLayerDepth;float beforeDepth = texture(depthMap, prevTexCoords).r - currentLayerDepth + layerDepth;// interpolation of texture coordinatesfloat weight = afterDepth / (afterDepth - beforeDepth);vec2 finalTexCoords = prevTexCoords * weight + currentTexCoords * (1.0 - weight);return finalTexCoords;
}效果如图:
HDR
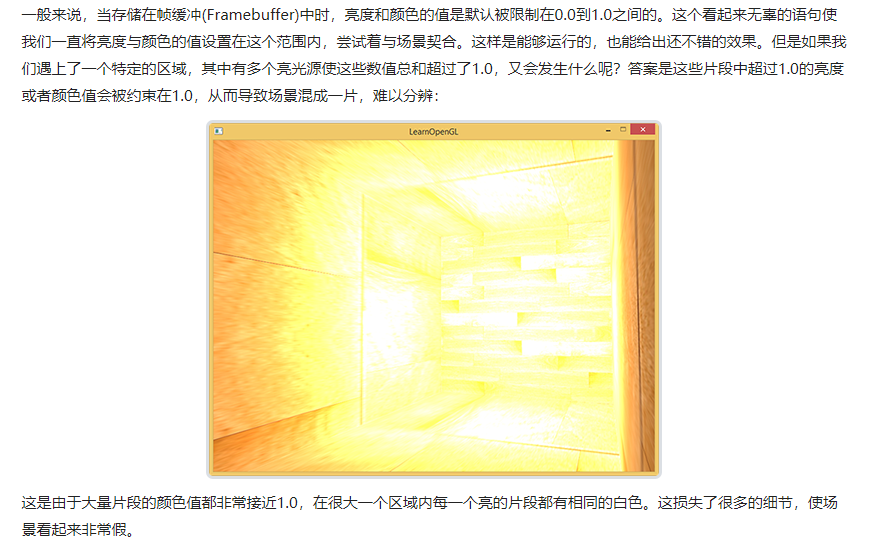
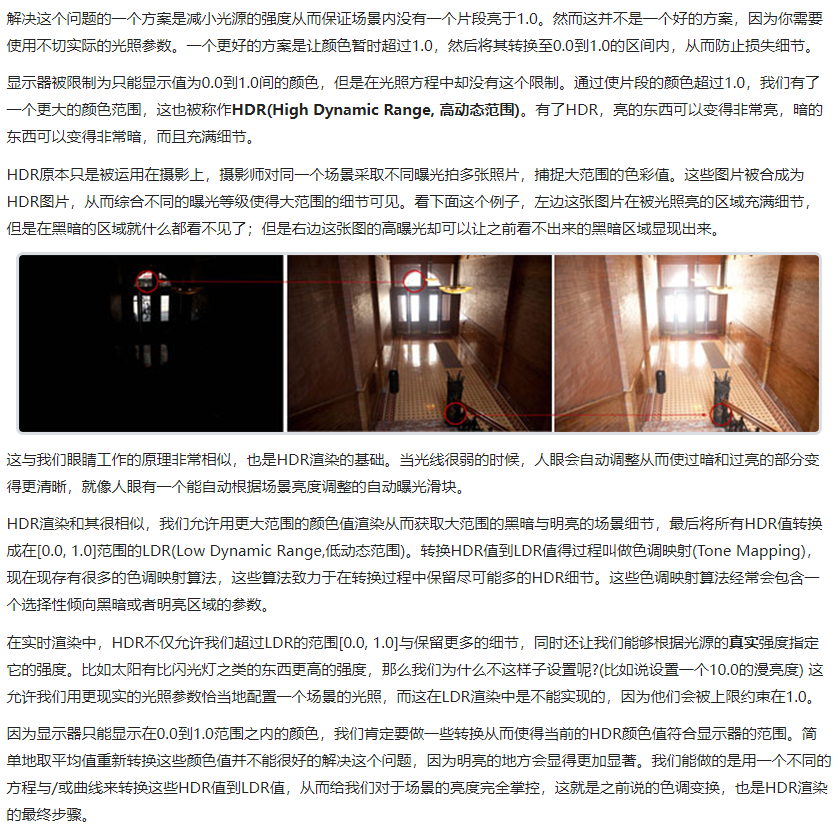
上来都是一些介绍HDR高动态范围概念的文字,我觉得这个翻译实在废话有点多,说白了HDR就是解决摄像设备里人为设置的亮度范围导致的过亮或者过暗时丢失的细节的机制:它允许你短暂地突破这个亮度范围,在捕获到细节后再将这些带有细节的图像融合在一起之后调整亮度到范围内。
很好,明白原理之后让我们深入细节。
首先我们需要一个浮点数类型的帧缓冲:
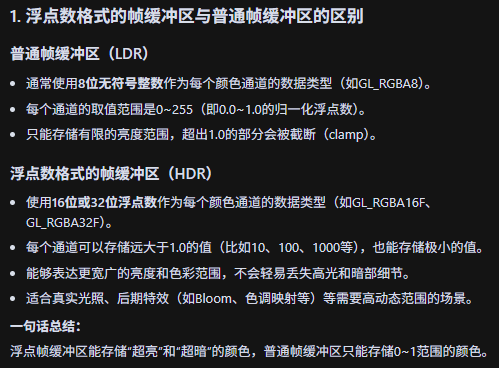
// 创建浮点帧缓冲
unsigned int hdrFBO;
glGenFramebuffers(1, &hdrFBO);然后我们还涉及到色调映射(Tonemapping)和曝光调整(Exposure)。
// 2. now render floating point color buffer to 2D quad and tonemap HDR colors to default framebuffer's (clamped) color range
hdrShader.use();
glActiveTexture(GL_TEXTURE0);
glBindTexture(GL_TEXTURE_2D, colorBuffer);
hdrShader.setInt("hdr", hdr);
hdrShader.setFloat("exposure", exposure);
renderQuad();#version 330 core
out vec4 FragColor;in vec2 TexCoords;uniform sampler2D hdrBuffer; // HDR帧缓冲的颜色纹理
uniform bool hdr; // 是否启用HDR色调映射
uniform float exposure; // 曝光度void main()
{ const float gamma = 2.2;vec3 hdrColor = texture(hdrBuffer, TexCoords).rgb; // 采样HDR颜色if(hdr){// Reinhard色调映射(被注释掉了)// vec3 result = hdrColor / (hdrColor + vec3(1.0));// 曝光色调映射vec3 result = vec3(1.0) - exp(-hdrColor * exposure);// Gamma校正result = pow(result, vec3(1.0 / gamma));FragColor = vec4(result, 1.0);}else{// 只做Gamma校正,不做色调映射vec3 result = pow(hdrColor, vec3(1.0 / gamma));FragColor = vec4(result, 1.0);}
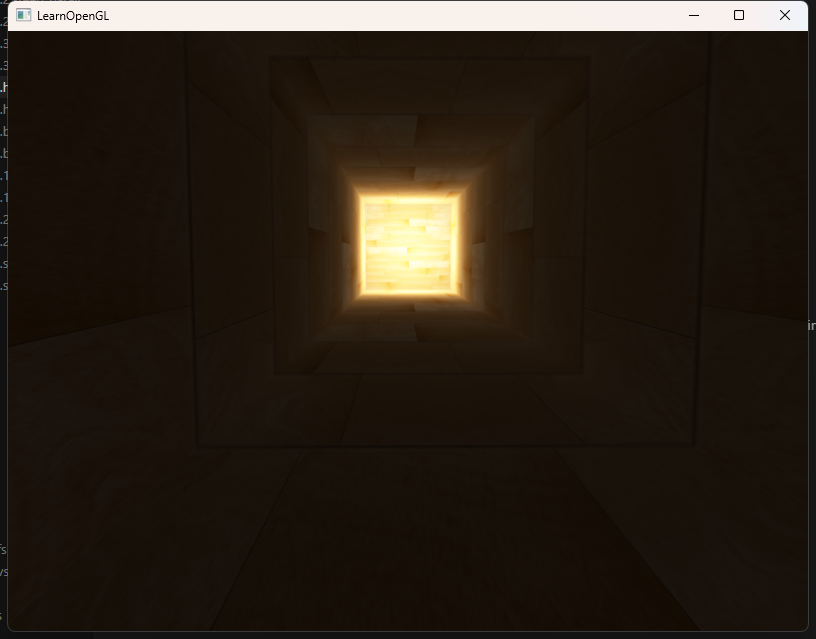
}效果如图:
相关文章:
LearnOpenGL-笔记-其十一
Normal Mapping 又到了介绍法线贴图的地方,我感觉我已经写了很多遍了... 法线贴图用最简单的话来介绍的话,就是通过修改贴图对应物体表面的法线来修改光照效果,从而在不修改物体实际几何形状的前提下实现不同于物体几何形状的视觉效果。 因…...

@Docker Compose 部署 Prometheus
文章目录 Docker Compose 部署 Prometheus1. 环境准备2. 配置文件准备3. 编写 Docker Compose 文件4. 启动服务5. 验证部署6. 常用操作7. 生产环境增强建议8. 扩展监控对象 Docker Compose 部署 Prometheus 1. 环境准备 安装 Docker(版本 ≥ 20.10)和 …...
openppp2 -- 1.0.0.25225 优化多线接入运营商路由调配
本文涉及到的内容,涉及到上个发行版本相关内容,人们在阅读本文之前,建议应当详细阅读上个版本之中的VBGP技术相关的介绍。 openppp2 -- 1.0.0.25196 版本新增的VBGP技术-CSDN博客 我们知道在现代大型的 Internet 网络服务商,很多…...

二次封装 Vuex for Uniapp 微信小程序开发
作为高级前端开发工程师,我将为你提供一个针对 Uniapp Vue2 Vuex 的 Store 二次封装方案,使团队成员能够更便捷地使用和管理状态。 封装目标 模块化管理状态 简化调用方式 提供类型提示(在 Vue2 中尽可能实现) 便于维护和查…...
详细到用手撕transformer下半部分
之前我们讨论了如何实现 Transformer 的核心多头注意力机制,那么这期我们来完整地实现整个 Transformer 的编码器和解码器。 Transformer 架构最初由 Vaswani 等人在 2017 年的论文《Attention Is All You Need》中提出,专为序列到序列(seq2s…...

Spring Boot 整合 Spring Data JPA、strategy 的策略区别、什么是 Spring Data JPA
DAY29.2 Java核心基础 Spring Boot 整合 Spring Data JPA Spring Data JPA根据具体的数据库分为不同的子模块,无论是关系型数据库和非关系型数据库,Spring Data都提供了支持 Mysql:Spring Data JPA Redis:Spring Data Redis …...

Vue 3.0 中的路由导航守卫详解
1. 路由导航守卫 1.1. 全局前置守卫 Vue-Router 提供的导航守卫主要用来守卫路由的跳转或取消。它们可以植入到全局、单个路由或组件级别。 全局前置守卫可以使用 router.beforeEach 注册: const router createRouter({... });router.beforeEach((to, from) &g…...

【Sqoop基础】Sqoop生态集成:与HDFS、Hive、HBase等组件的协同关系深度解析
目录 1 Sqoop概述与大数据生态定位 2 Sqoop与HDFS的深度集成 2.1 技术实现原理 2.2 详细工作流程 2.3 性能优化实践 3 Sqoop与Hive的高效协同 3.1 集成架构设计 3.2 数据类型映射处理 3.3 案例演示 4 Sqoop与HBase的实时集成 4.1 数据模型转换挑战 4.2 详细集成流程…...
MySQL + CloudCanal + Iceberg + StarRocks 构建全栈数据服务
简述 在业务数据快速膨胀的今天,企业对 低成本存储 与 实时查询分析能力 的需求愈发迫切。 本文将带你实战构建一条 MySQL 到 Iceberg 的数据链路,借助 CloudCanal 快速完成数据迁移与同步,并使用 StarRocks 完成数据查询等操作,…...

MSVC支持但是Clang会报错的C++行为
MSVC的非标 目的友元别名模板类显式特例化的命名空间限制 目的 因为在使用clang进行ast分析msvc项目的时候,出现了爆红现象,了解到msvc会有一些不严格按照c标准但是允许的语法,在这点上clang就很严格,所以本文以clang为基准&…...

截屏精灵:轻松截屏,高效编辑
在移动互联网时代,截图已经成为我们日常使用手机时的一项基本操作。无论是记录重要信息、分享有趣内容,还是进行学习和工作,一款好用的截图工具都能极大地提升我们的效率。截屏精灵就是这样一款功能强大、操作简单的截图工具,它不…...
【JavaWeb】基本概念、web服务器、Tomcat、HTTP协议
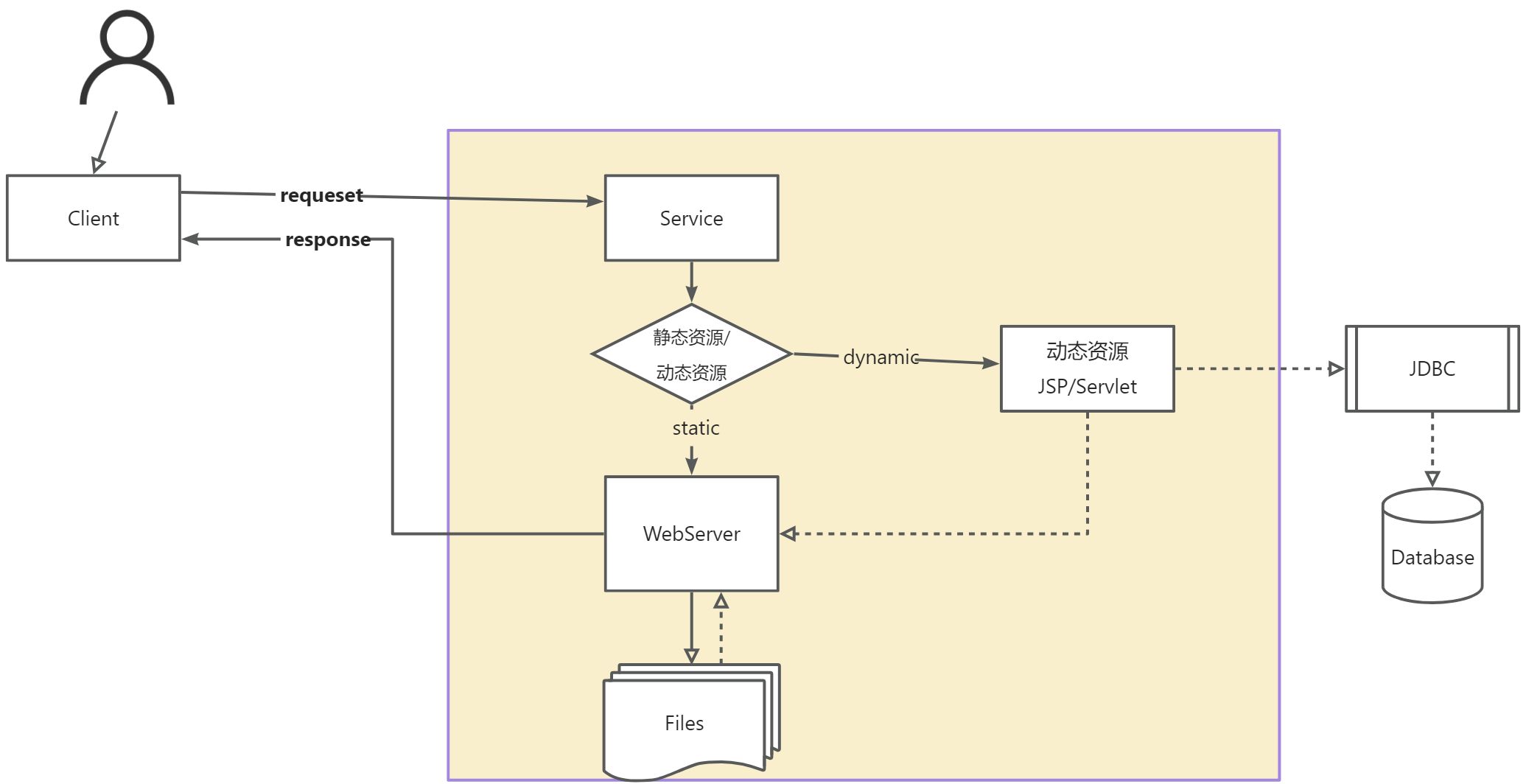
目录 1. 基本概念1.1 基本概念1.2 web应用程序1.3 静态web1.4 动态web 2. web服务器3. tomcat详解3.1 安装3.2 启动3.3 配置3.3.1 配置启动的端口号3.3.2 配置主机的名称3.3.3 其他常用配置项日志配置数据源配置安全配置 3.4 发布一个网站 4. Http协议4.1 什么是http4.2 http的…...

黑马程序员C++核心编程笔记--4 类和对象--封装
C面向对象三大特征:封装、继承、多态 C认为万事万物皆对象,对象有其属性和行为,具有相同性质的对象可以抽象称为类 4.1 封装 4.1.1 封装的意义 将属性和行为作为一个整体,表现生活中的事物将属性和行为加以权限控制 在设计类…...

Debian:自由操作系统的精神图腾与技术基石
🔥「炎码工坊」技术弹药已装填! 点击关注 → 解锁工业级干货【工具实测|项目避坑|源码燃烧指南】 ——解码Linux世界最纯粹的开源哲学 一、Debian的诞生:从个人实验到全球协作 1993年,一位名为Ian Murdock的程序员在开源社区的启…...
云计算Linux Rocky day02(安装Linux系统、设备表示方式、Linux基本操作)
云计算Linux Rocky day02(安装Linux系统、设备表示方式、Linux基本操作) 目录 云计算Linux Rocky day02(安装Linux系统、设备表示方式、Linux基本操作)1、虚拟机VMware安装Rocky2、Linux命令行3、Linux Rocky修改字体大小和背景颜…...

在 ODROID-H3+ 上安装 Win11 系统
在 ODROID-H3 上安装 Windows 11 系统。 以下是完整的步骤,包括 BIOS 设置、U 盘制作、安装和驱动处理,全程不保留之前的系统数据。 ✅ 准备工作 1. 准备一个 ≥8GB 的 USB 启动盘 用另一台电脑制作 Windows 11 安装盘。 👉 推荐工具&…...
)
Docker常用命令操作指南(一)
Docker常用命令操作指南-1 一、Docker镜像相关命令1.1 搜索镜像(docker search)1.2 拉取镜像(docker pull)1.3 查看本地镜像(docker images)1.4 删除镜像(docker rmi) 二、Docker容器…...

什么是 SQL 注入?如何防范?
什么是 SQL 注入?如何防范? 1. SQL 注入概述 1.1 基本定义 SQL 注入(SQL Injection)是一种通过将恶意SQL 语句插入到应用程序的输入参数中,从而欺骗服务器执行非预期SQL命令的攻击技术。攻击者可以利用此漏洞绕过认证、窃取数据甚至破坏数据库。 关键结论:SQL 注入是O…...

使用el-input数字校验,输入汉字之后校验取消不掉
先说说复现方式 本来input是只能输入数字的,然后你不小心输入了汉字,触发校验了,然后这时候,你发现校验取消不掉了 就这样了 咋办啊,你一看校验没错啊,各种number啥的也写了,发现没问题啊 <el-inputv…...

Docker容器启动失败的常见原因分析
我们在开发部署的时候,用 Docker 打包环境,理论上是“我装好了你就能跑”。但理想很丰满,现实往往一 docker run 下去就翻车了。 今天来盘点一下我实际工作中经常遇到的 Docker 容器启动失败的常见原因,顺便给点 debug 的小技巧&a…...

Java提取markdown中的表格
Java提取markdown中的表格 说明 这篇博文是一个舍近求远的操作,如果只需要要对markdown中的表格数据进行提取,完全可以通过正在表达式或者字符串切分来完成。但是鉴于学习的目的,这次采用了commonmark包中的工具来完成。具体实现过程如下 实…...
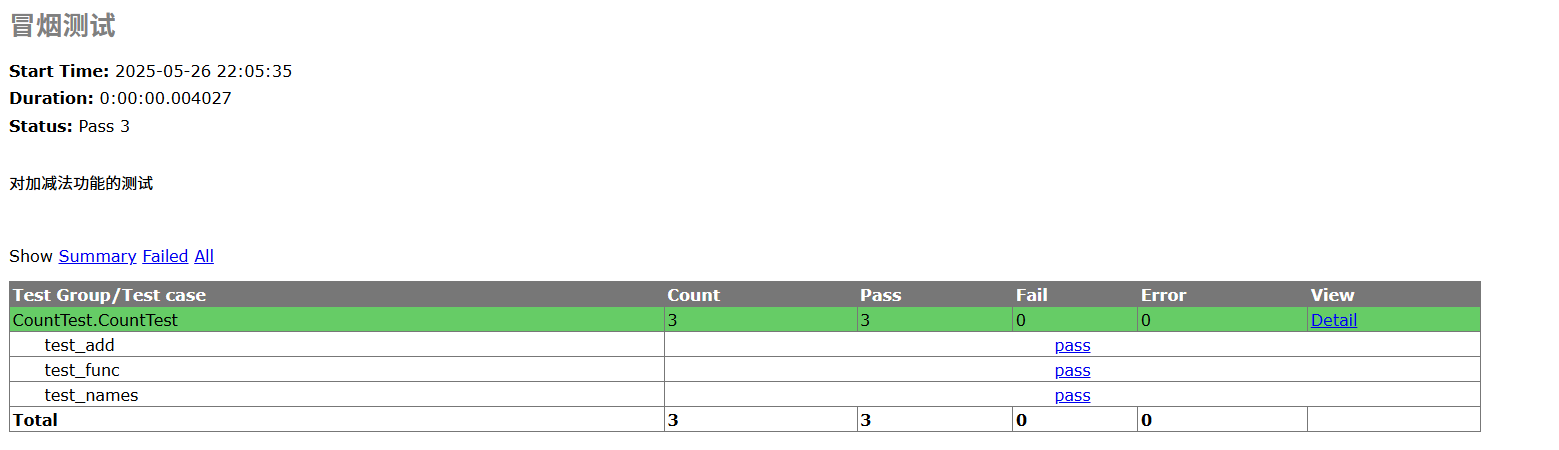
立志成为一名优秀测试开发工程师(第七天)——unittest框架的学习
目录 unittest框架的学习 一、测试类的编写 创建相关测试类cal.py、CountTest.py 二、常见断言方法 使用unittest单元测试框架编写测试用例CountTest.py 注意:执行的时候光标一定要放在括号后面,鼠标右键运行 三、对测试环境的初始化和清除模块…...
:营收阶段的核心指标与盈利模型优化——从数据到商业决策的落地)
精益数据分析(85/126):营收阶段的核心指标与盈利模型优化——从数据到商业决策的落地
精益数据分析(85/126):营收阶段的核心指标与盈利模型优化——从数据到商业决策的落地 c。 一、营收健康度的核心指标:投资回报率模型 (一)季度再发性营收增长率(QRR) 该指标衡量…...
论坛系统(4)
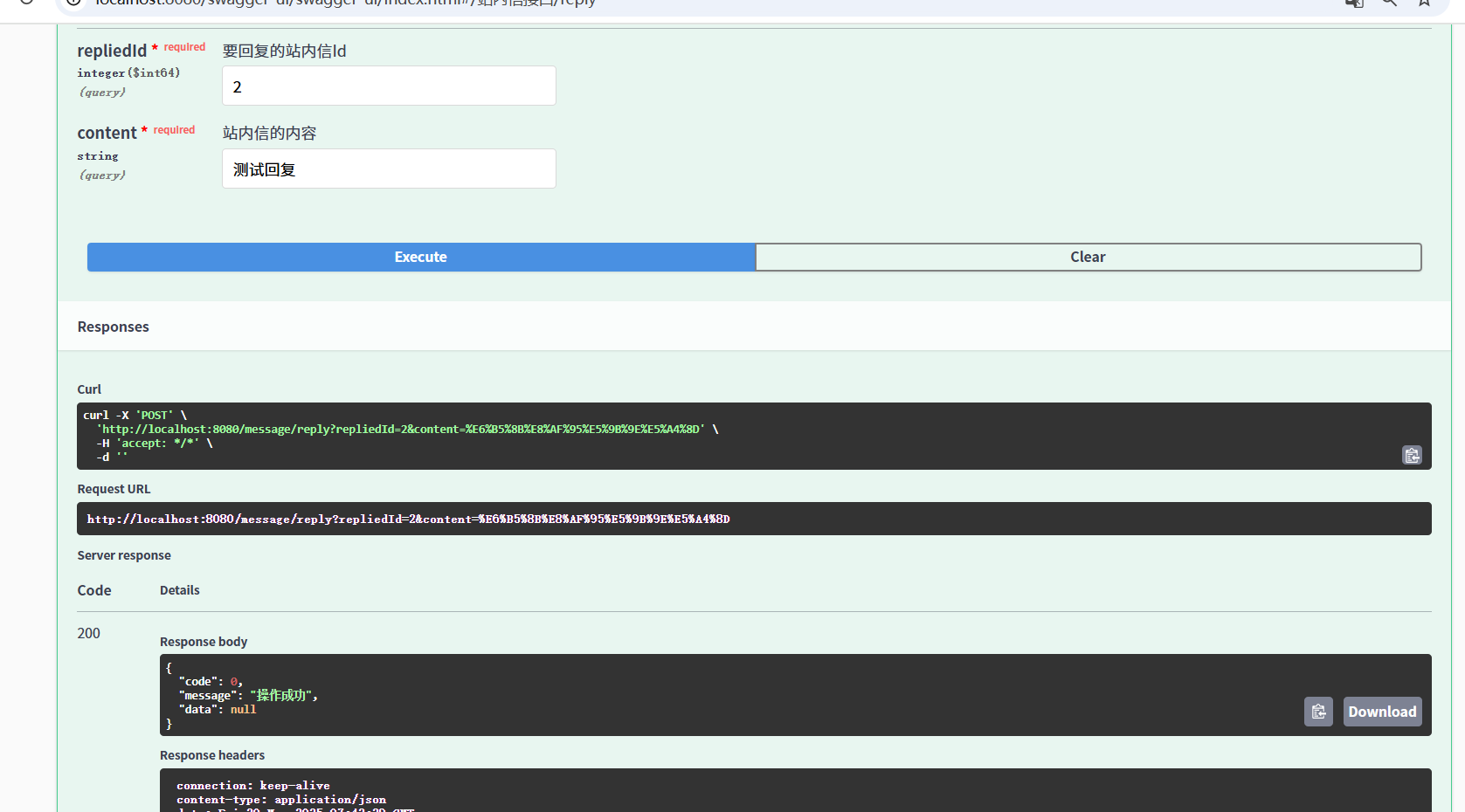
用户详情 获取用户信息 实现逻辑 ⽤⼾提交请求,服务器根据是否传⼊Id参数决定返回哪个⽤⼾的详情 1. 不传⽤⼾Id,返回当前登录⽤⼾的详情(从session获取) 2. 传⼊⽤⼾Id,返回指定Id的⽤⼾详情(根据用户id去查) 俩种方式获得用户信息 参…...

本地Markdown开源知识库选型指南
本地Markdown开源知识库选型指南 以下是几款优秀的本地Markdown开源知识库解决方案,适合不同需求场景: 1. Obsidian (非完全开源但免费) 特点:基于Markdown的本地优先知识管理,丰富的插件生态优势:双向链接、图形视…...

【.net core】SkiaSharp 如何在Linux上实现
1. 安装依赖库 首先需要安装 SkiaSharp 运行时依赖: # Ubuntu/Debian sudo apt-get update sudo apt-get install -y libfontconfig1 libfreetype6 libx11-6 libx11-xcb1 libxcb1 \libxcomposite1 libxcursor1 libxdamage1 libxi6 libxtst6 \libnss3 libcups2 lib…...

后端项目中静态文案国际化语言包构建选型
这是一个很关键的问题。在做国际化(i18n)时,不同语言包格式如 .resx、.properties 和 .json 都可用,但各自有适用场景、特性与限制,你在选择时可以根据你的开发语言、生态和维护成本权衡。 ✅ 一张对比表:.…...

前端面经 React常见的生命周期
初始化阶段 constructor state的初始化,防抖节流的绑定getDerivedStateFromProps 静态函数 当作纯函数使用 传入props和state,合并成一个新的statecomponentWillMount 组件如果有getDrivedStatefromprops不会执行 针对一些接口的预请求时使用rendercomp…...
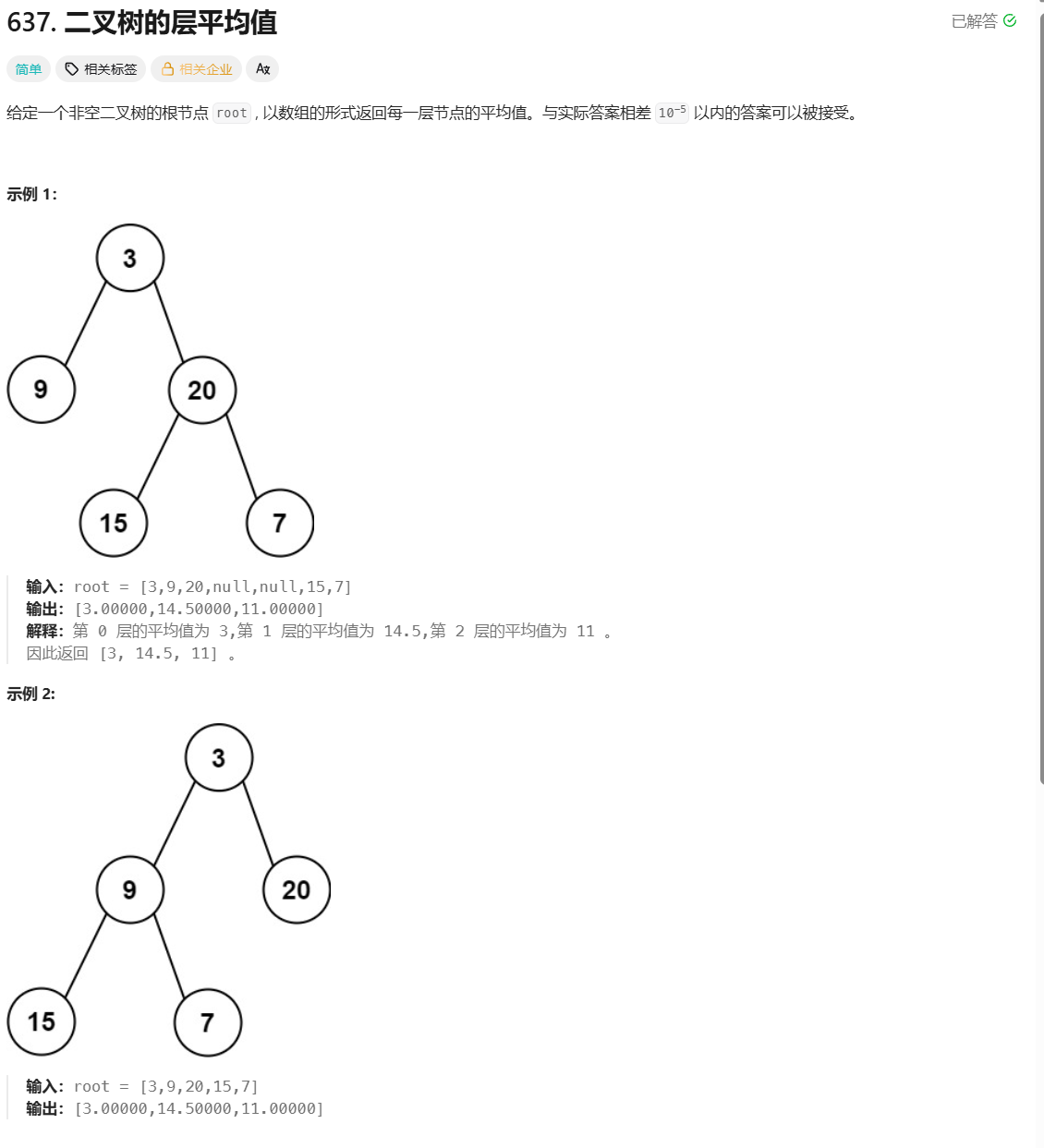
力扣面试150题--二叉树的层平均值
Day 54 题目描述 思路 初次做法(笨):使用两个队列,一个队列存放树的节点,一个队列存放对应节点的高度,使用x存放上一个节点,highb存放上一个节点的高度,sum存放当前层的节点值之和…...
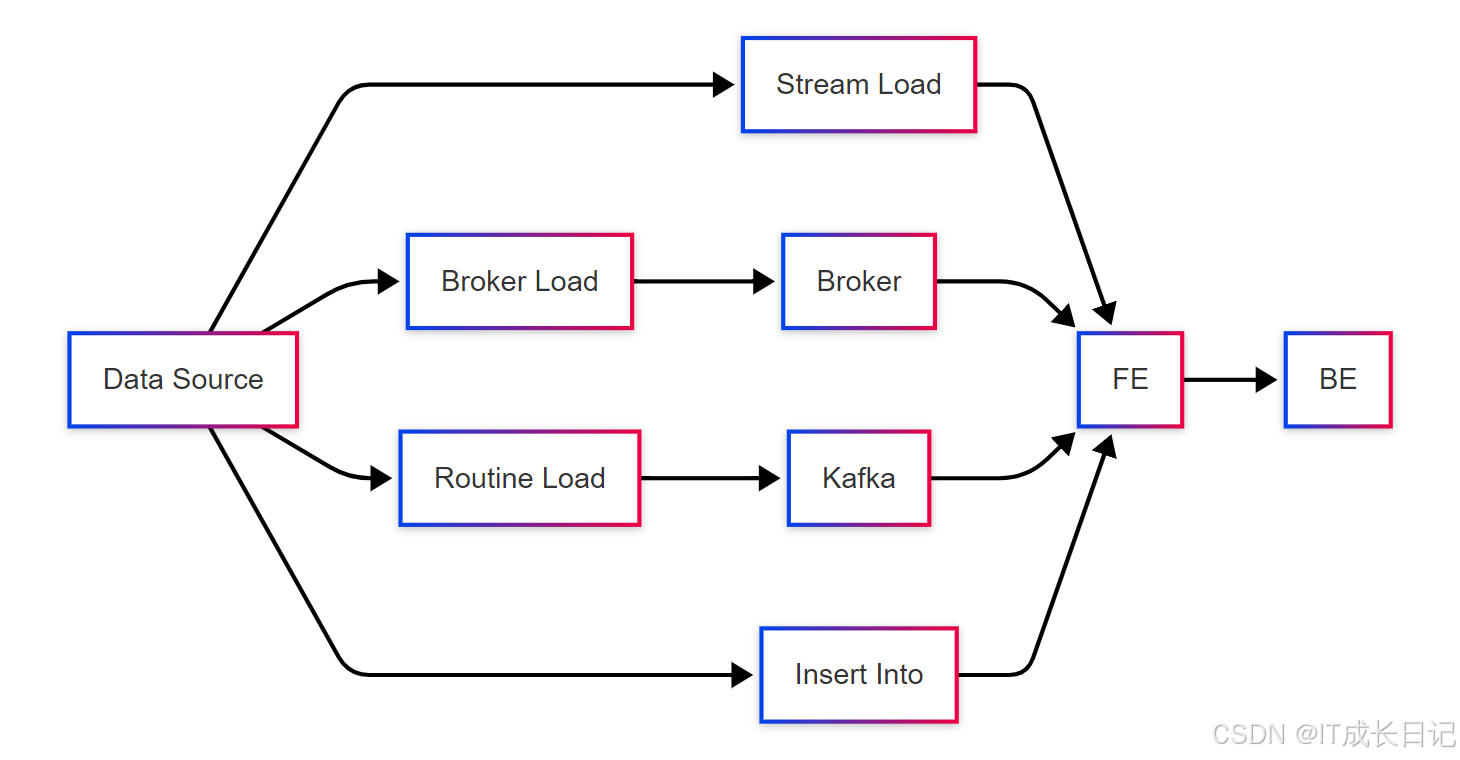
【Doris入门】Doris初识:分布式分析型数据库的核心价值与架构解析
目录 1 Doris简介与核心价值 2 Doris架构深度解析 2.1 Frontend(FE)架构 2.2 Backend(BE)架构 3 Doris核心概念详解 3.1 数据分布模型 3.2 Tablet与Replica 3.3 数据模型 4 Doris关键技术解析 4.1 存储引擎 4.2 查询执…...