嵌入式学习--江协stm32day3
这是我目前为止认为最重要的模块--TIM定时器,这里我们主要学习通用定时器
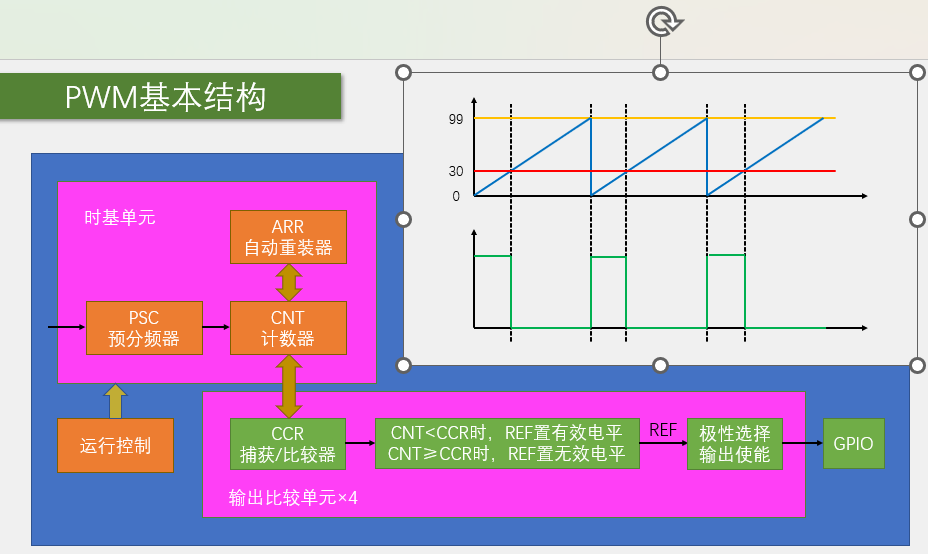
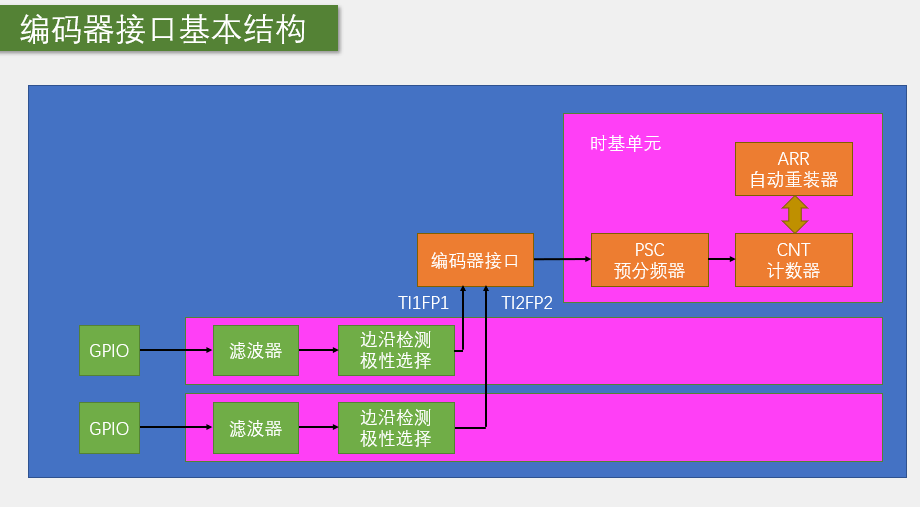
最小的计数计时单元为时基单元,包括PSC,ARR,CNT
- CK_PSC(Prescaler,预分频器):作用是对输入时钟信号进行分频,降低时钟频率,以便得到合适频率的时钟信号供后续模块使用 。比如若预分频系数设为 n,那么输入时钟频率就会变为原来的 1/n 。
- CNT 计数器(Counter) :在经过预分频后的时钟信号(CK_CNT)驱动下进行计数。它可以进行递增、递减或增减计数操作 。当达到设定的计数值时,可触发相应事件 。
- 自动重装载寄存器(Auto - Reload Register) :存储着计数器计数的上限值(或下限值,取决于计数模式)。当计数器达到该值时,会根据配置自动重新开始计数 ,实现循环定时功能 。
- UI(Update Interrupt,更新中断) :当计数器发生更新事件(如计数溢出、计数到零等情况 )时,会产生更新中断信号,用于通知处理器进行相应处理 。
- U(Update event,更新事件) :表示计数器发生更新的事件,与更新中断相关联,触发中断的同时也可能伴随一些寄存器状态更新等操作 。

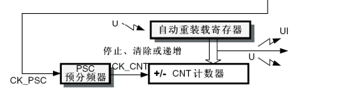
内部的输入时钟信号72MHz,通过PSC进行调节输入
与51的定时器不同,这个可以设置溢出值(ARR)
-
定时器触发中断模式:
- 计数器(CNT)与自动重装寄存器配合,实现定时计数。当计数溢出(更新事件)或与比较寄存器匹配(比较事件)时,可产生中断(如更新中断、比较中断),用于定时触发中断服务程序(图中虽未直接标注中断输出,但通用定时器的典型功能包含此模式,通过内部事件触发中断逻辑实现)。
-
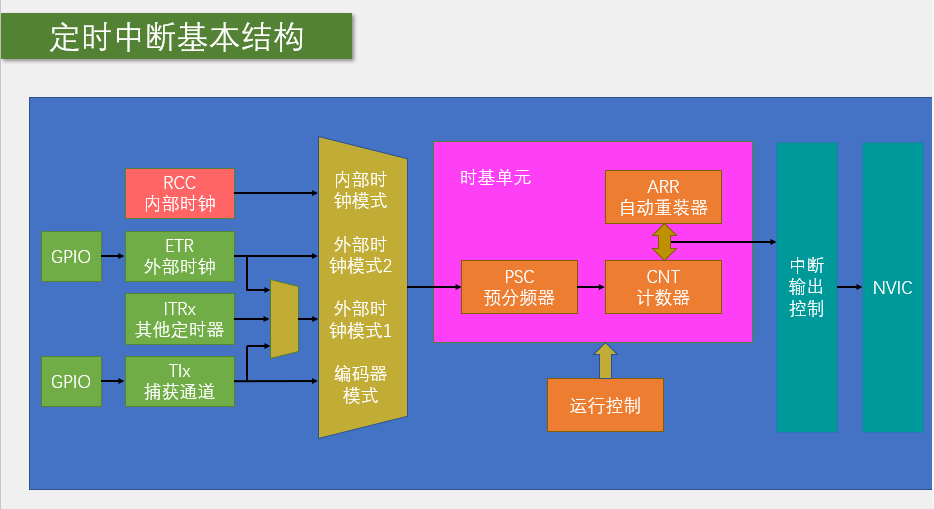
定时器控制输出模式:
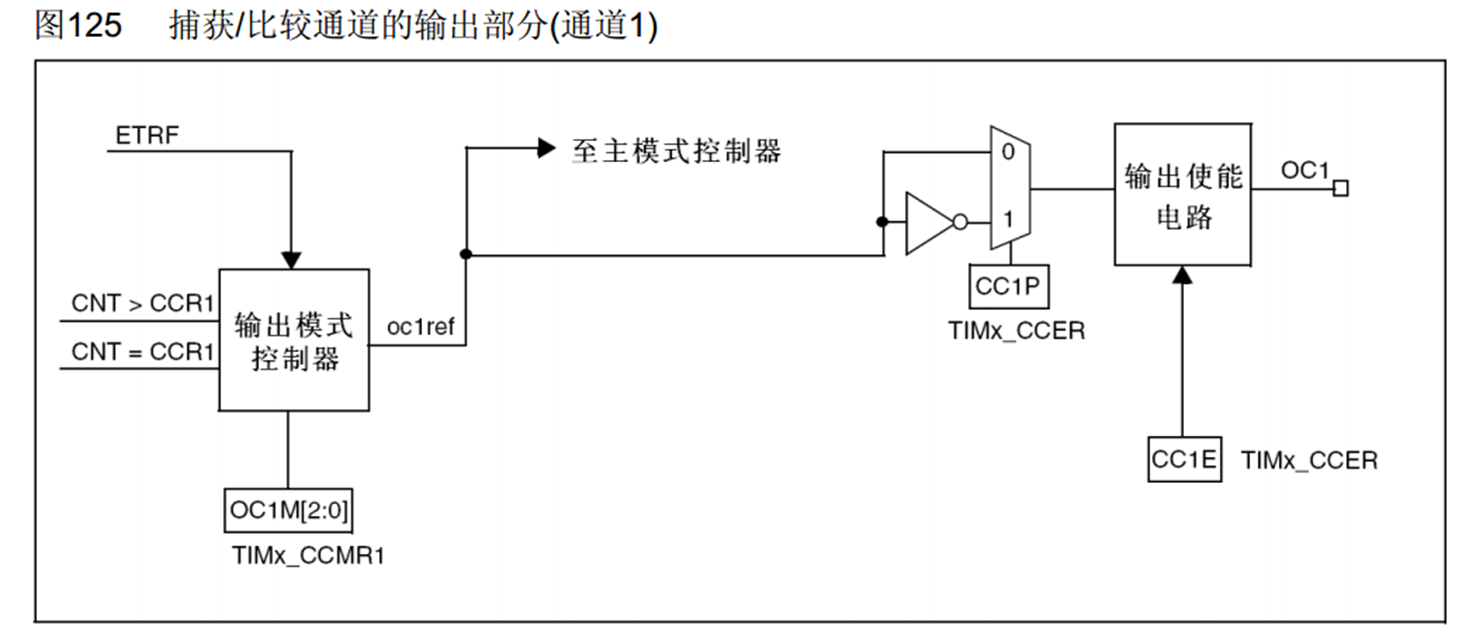
- 图中明确包含输出控制模块(OC1REF 到 OC4REF,连接至 TIMx_CH 输出),通过比较寄存器(OC1~OC4)与计数器的匹配关系,生成 PWM 波形或其他输出信号(如边沿对齐、中心对齐 PWM),直接控制外部引脚输出(如电机驱动、信号调制等)。
定时器定时中断
#include "stm32f10x.h" // Device header/*** 函 数:定时中断初始化* 参 数:无* 返 回 值:无*/
void Timer_Init(void)
{/*开启时钟*/RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //开启TIM2的时钟/*配置时钟源*/TIM_InternalClockConfig(TIM2); //选择TIM2为内部时钟,若不调用此函数,TIM默认也为内部时钟/*时基单元初始化*/TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体变量TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数TIM_TimeBaseInitStructure.TIM_Period = 10000 - 1; //计数周期,即ARR的值TIM_TimeBaseInitStructure.TIM_Prescaler = 7200 - 1; //预分频器,即PSC的值TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级定时器才会用到TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure); //将结构体变量交给TIM_TimeBaseInit,配置TIM2的时基单元 /*中断输出配置*/TIM_ClearFlag(TIM2, TIM_FLAG_Update); //清除定时器更新标志位//TIM_TimeBaseInit函数末尾,手动产生了更新事件//若不清除此标志位,则开启中断后,会立刻进入一次中断//如果不介意此问题,则不清除此标志位也可TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE); //开启TIM2的更新中断/*NVIC中断分组*/NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //配置NVIC为分组2//即抢占优先级范围:0~3,响应优先级范围:0~3//此分组配置在整个工程中仅需调用一次//若有多个中断,可以把此代码放在main函数内,while循环之前//若调用多次配置分组的代码,则后执行的配置会覆盖先执行的配置/*NVIC配置*/NVIC_InitTypeDef NVIC_InitStructure; //定义结构体变量NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; //选择配置NVIC的TIM2线NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //指定NVIC线路的抢占优先级为2NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //指定NVIC线路的响应优先级为1NVIC_Init(&NVIC_InitStructure); //将结构体变量交给NVIC_Init,配置NVIC外设/*TIM使能*/TIM_Cmd(TIM2, ENABLE); //使能TIM2,定时器开始运行
}/* 定时器中断函数,可以复制到使用它的地方
void TIM2_IRQHandler(void)
{if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET){TIM_ClearITPendingBit(TIM2, TIM_IT_Update);}
}
*/定时器外部时钟
这里使用对射式红外传感作为外部时钟
/*开启时钟*/RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //开启TIM2的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA0引脚初始化为上拉输入/*外部时钟配置*/TIM_ETRClockMode2Config(TIM2, TIM_ExtTRGPSC_OFF, TIM_ExtTRGPolarity_NonInverted, 0x0F);//选择外部时钟模式2,时钟从TIM_ETR引脚输入//注意TIM2的ETR引脚固定为PA0,无法随意更改//最后一个滤波器参数加到最大0x0F,可滤除时钟信号抖动输出比较

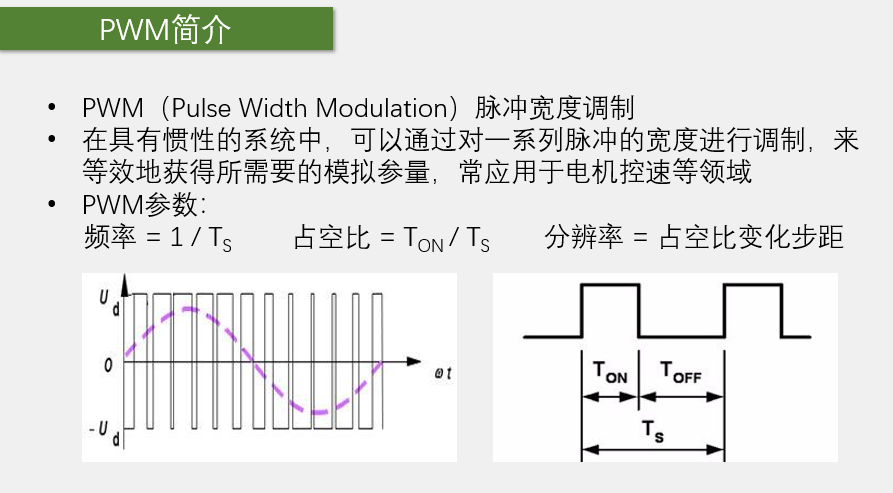
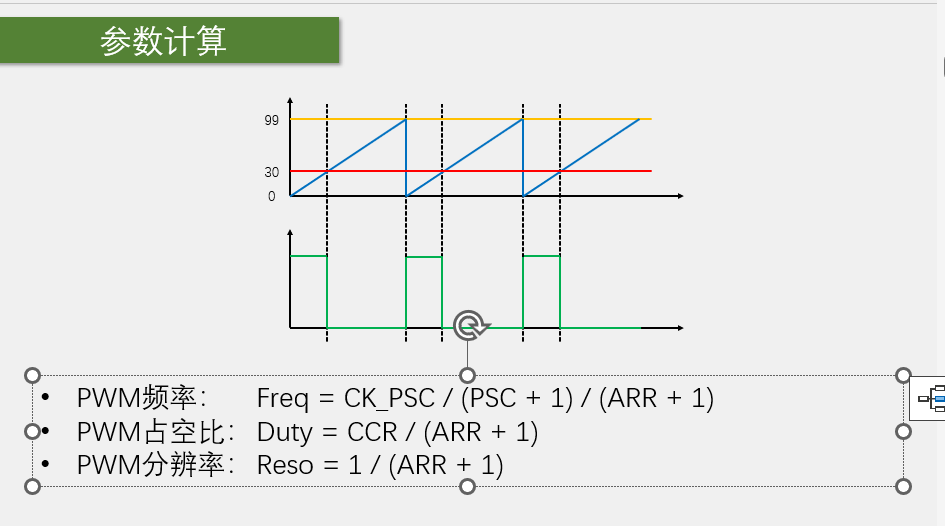
PWM
#include "stm32f10x.h" // Device header/*** 函 数:PWM初始化* 参 数:无* 返 回 值:无*/
void PWM_Init(void)
{/*开启时钟*/RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //开启TIM2的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟/*GPIO重映射*/
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); //开启AFIO的时钟,重映射必须先开启AFIO的时钟
// GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2, ENABLE); //将TIM2的引脚部分重映射,具体的映射方案需查看参考手册
// GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE); //将JTAG引脚失能,作为普通GPIO引脚使用/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //GPIO_Pin_15;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA0引脚初始化为复用推挽输出 //受外设控制的引脚,均需要配置为复用模式 /*配置时钟源*/TIM_InternalClockConfig(TIM2); //选择TIM2为内部时钟,若不调用此函数,TIM默认也为内部时钟/*时基单元初始化*/TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体变量TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //计数周期,即ARR的值TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; //预分频器,即PSC的值TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级定时器才会用到TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure); //将结构体变量交给TIM_TimeBaseInit,配置TIM2的时基单元/*输出比较初始化*/TIM_OCInitTypeDef TIM_OCInitStructure; //定义结构体变量TIM_OCStructInit(&TIM_OCInitStructure); //结构体初始化,若结构体没有完整赋值//则最好执行此函数,给结构体所有成员都赋一个默认值//避免结构体初值不确定的问题TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //输出比较模式,选择PWM模式1TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性,选择为高,若选择极性为低,则输出高低电平取反TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //输出使能TIM_OCInitStructure.TIM_Pulse = 0; //初始的CCR值TIM_OC1Init(TIM2, &TIM_OCInitStructure); //将结构体变量交给TIM_OC1Init,配置TIM2的输出比较通道1/*TIM使能*/TIM_Cmd(TIM2, ENABLE); //使能TIM2,定时器开始运行
}/*** 函 数:PWM设置CCR* 参 数:Compare 要写入的CCR的值,范围:0~100* 返 回 值:无* 注意事项:CCR和ARR共同决定占空比,此函数仅设置CCR的值,并不直接是占空比* 占空比Duty = CCR / (ARR + 1)*/
void PWM_SetCompare1(uint16_t Compare)
{TIM_SetCompare1(TIM2, Compare); //设置CCR1的值
}
PWM驱动LED呼吸灯
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "PWM.h"uint8_t i; //定义for循环的变量int main(void)
{/*模块初始化*/OLED_Init(); //OLED初始化PWM_Init(); //PWM初始化while (1){for (i = 0; i <= 100; i++){PWM_SetCompare1(i); //依次将定时器的CCR寄存器设置为0~100,PWM占空比逐渐增大,LED逐渐变亮Delay_ms(10); //延时10ms}for (i = 0; i <= 100; i++){PWM_SetCompare1(100 - i); //依次将定时器的CCR寄存器设置为100~0,PWM占空比逐渐减小,LED逐渐变暗Delay_ms(10); //延时10ms}}
}
PWM驱动舵机
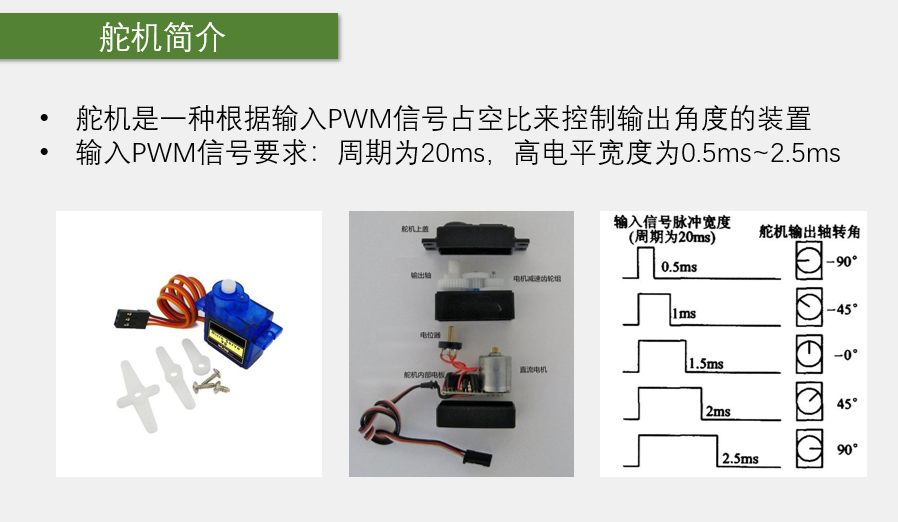
根据周期和高电平宽度修改
TIM_TimeBaseInitStructure.TIM_Period = 20000 - 1; //计数周期,即ARR的值TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1; //预分频器,即PSC的值PWM驱动直流电机

#include "stm32f10x.h" // Device header
#include "PWM.h"/*** 函 数:直流电机初始化* 参 数:无* 返 回 值:无*/
void Motor_Init(void)
{/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA4和PA5引脚初始化为推挽输出 PWM_Init(); //初始化直流电机的底层PWM
}/*** 函 数:直流电机设置速度* 参 数:Speed 要设置的速度,范围:-100~100* 返 回 值:无*/
void Motor_SetSpeed(int8_t Speed)
{if (Speed >= 0) //如果设置正转的速度值{GPIO_SetBits(GPIOA, GPIO_Pin_4); //PA4置高电平GPIO_ResetBits(GPIOA, GPIO_Pin_5); //PA5置低电平,设置方向为正转PWM_SetCompare3(Speed); //PWM设置为速度值}else //否则,即设置反转的速度值{GPIO_ResetBits(GPIOA, GPIO_Pin_4); //PA4置低电平GPIO_SetBits(GPIOA, GPIO_Pin_5); //PA5置高电平,设置方向为反转PWM_SetCompare3(-Speed); //PWM设置为负的速度值,因为此时速度值为负数,而PWM只能给正数}
}
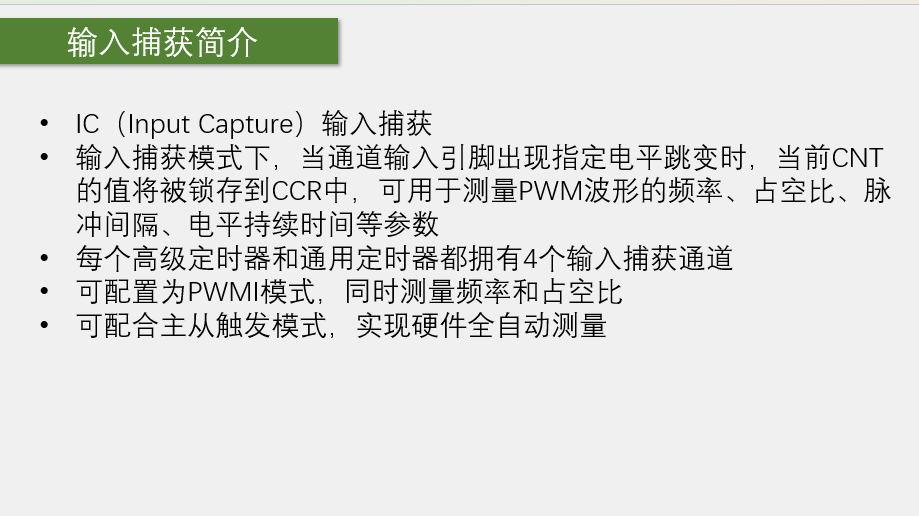
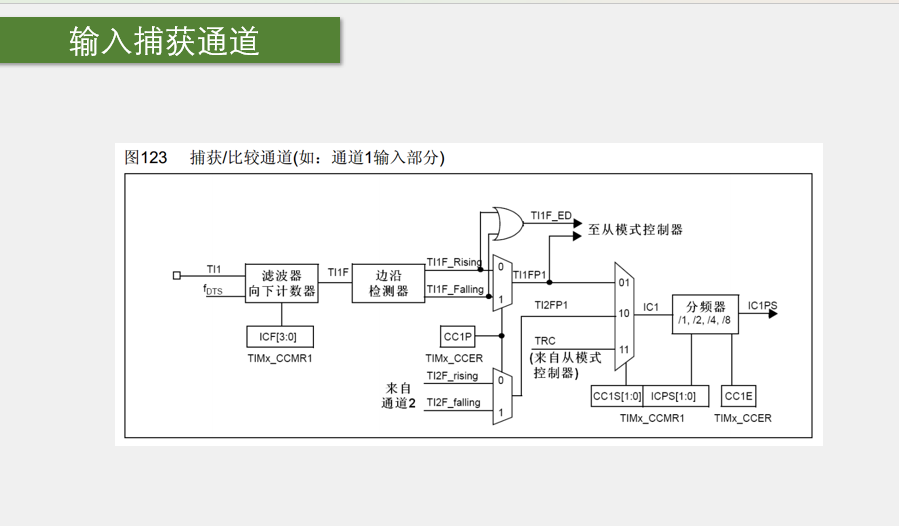
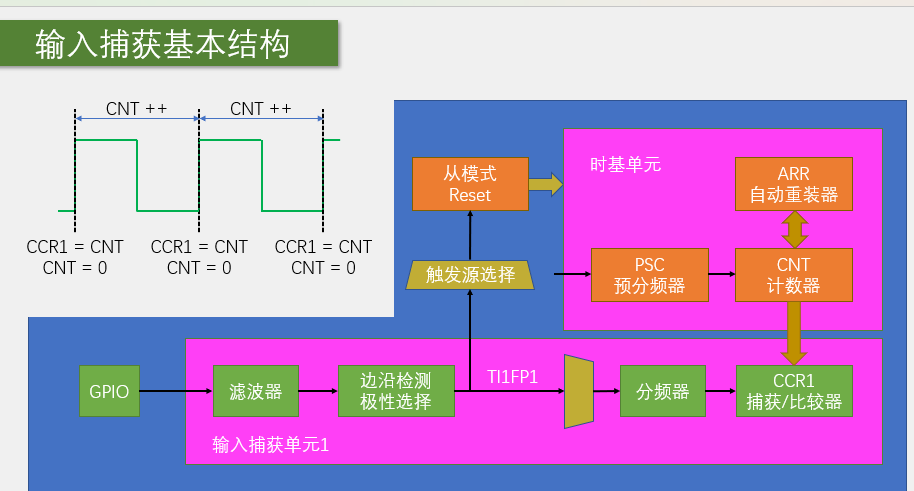
输入捕获
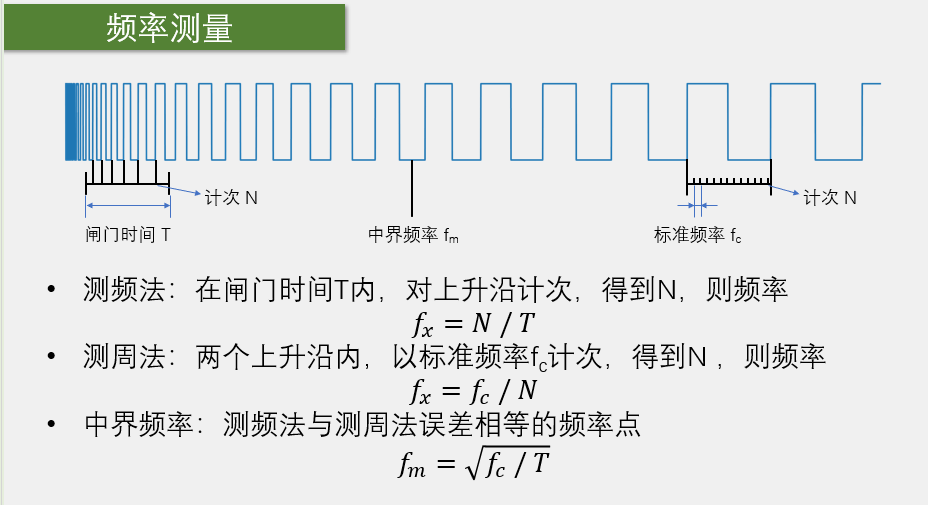
输入捕获模式测频率
测频法就像是高中用来测量钟摆频率(高频)
测周用于低频
#include "stm32f10x.h" // Device header/*** 函 数:输入捕获初始化* 参 数:无* 返 回 值:无*/
void IC_Init(void)
{/*开启时钟*/RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //开启TIM3的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA6引脚初始化为上拉输入/*配置时钟源*/TIM_InternalClockConfig(TIM3); //选择TIM3为内部时钟,若不调用此函数,TIM默认也为内部时钟/*时基单元初始化*/TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体变量TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数TIM_TimeBaseInitStructure.TIM_Period = 65536 - 1; //计数周期,即ARR的值TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1; //预分频器,即PSC的值TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级定时器才会用到TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure); //将结构体变量交给TIM_TimeBaseInit,配置TIM3的时基单元/*输入捕获初始化*/TIM_ICInitTypeDef TIM_ICInitStructure; //定义结构体变量TIM_ICInitStructure.TIM_Channel = TIM_Channel_1; //选择配置定时器通道1TIM_ICInitStructure.TIM_ICFilter = 0xF; //输入滤波器参数,可以过滤信号抖动TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //极性,选择为上升沿触发捕获TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //捕获预分频,选择不分频,每次信号都触发捕获TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //输入信号交叉,选择直通,不交叉TIM_ICInit(TIM3, &TIM_ICInitStructure); //将结构体变量交给TIM_ICInit,配置TIM3的输入捕获通道/*选择触发源及从模式*/TIM_SelectInputTrigger(TIM3, TIM_TS_TI1FP1); //触发源选择TI1FP1TIM_SelectSlaveMode(TIM3, TIM_SlaveMode_Reset); //从模式选择复位//即TI1产生上升沿时,会触发CNT归零/*TIM使能*/TIM_Cmd(TIM3, ENABLE); //使能TIM3,定时器开始运行
}/*** 函 数:获取输入捕获的频率* 参 数:无* 返 回 值:捕获得到的频率*/
uint32_t IC_GetFreq(void)
{return 1000000 / (TIM_GetCapture1(TIM3) + 1); //测周法得到频率fx = fc / N,这里不执行+1的操作也可
}
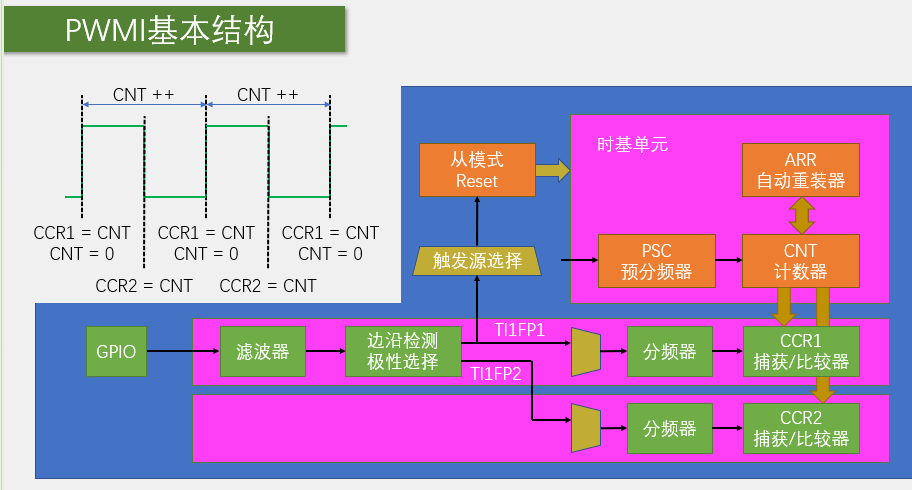
PWM模式测频率占空比
#include "stm32f10x.h" // Device header/*** 函 数:输入捕获初始化* 参 数:无* 返 回 值:无*/
void IC_Init(void)
{/*开启时钟*/RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //开启TIM3的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA6引脚初始化为上拉输入/*配置时钟源*/TIM_InternalClockConfig(TIM3); //选择TIM3为内部时钟,若不调用此函数,TIM默认也为内部时钟/*时基单元初始化*/TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体变量TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数TIM_TimeBaseInitStructure.TIM_Period = 65536 - 1; //计数周期,即ARR的值TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1; //预分频器,即PSC的值TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级定时器才会用到TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure); //将结构体变量交给TIM_TimeBaseInit,配置TIM3的时基单元/*PWMI模式初始化*/TIM_ICInitTypeDef TIM_ICInitStructure; //定义结构体变量TIM_ICInitStructure.TIM_Channel = TIM_Channel_1; //选择配置定时器通道1TIM_ICInitStructure.TIM_ICFilter = 0xF; //输入滤波器参数,可以过滤信号抖动TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //极性,选择为上升沿触发捕获TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //捕获预分频,选择不分频,每次信号都触发捕获TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //输入信号交叉,选择直通,不交叉TIM_PWMIConfig(TIM3, &TIM_ICInitStructure); //将结构体变量交给TIM_PWMIConfig,配置TIM3的输入捕获通道//此函数同时会把另一个通道配置为相反的配置,实现PWMI模式/*选择触发源及从模式*/TIM_SelectInputTrigger(TIM3, TIM_TS_TI1FP1); //触发源选择TI1FP1TIM_SelectSlaveMode(TIM3, TIM_SlaveMode_Reset); //从模式选择复位//即TI1产生上升沿时,会触发CNT归零/*TIM使能*/TIM_Cmd(TIM3, ENABLE); //使能TIM3,定时器开始运行
}/*** 函 数:获取输入捕获的频率* 参 数:无* 返 回 值:捕获得到的频率*/
uint32_t IC_GetFreq(void)
{return 1000000 / (TIM_GetCapture1(TIM3) + 1); //测周法得到频率fx = fc / N,这里不执行+1的操作也可
}/*** 函 数:获取输入捕获的占空比* 参 数:无* 返 回 值:捕获得到的占空比*/
uint32_t IC_GetDuty(void)
{return (TIM_GetCapture2(TIM3) + 1) * 100 / (TIM_GetCapture1(TIM3) + 1); //占空比Duty = CCR2 / CCR1 * 100,这里不执行+1的操作也可
}
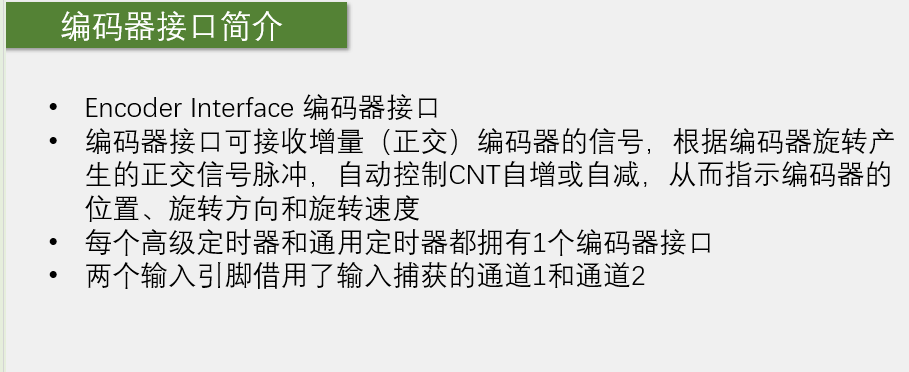
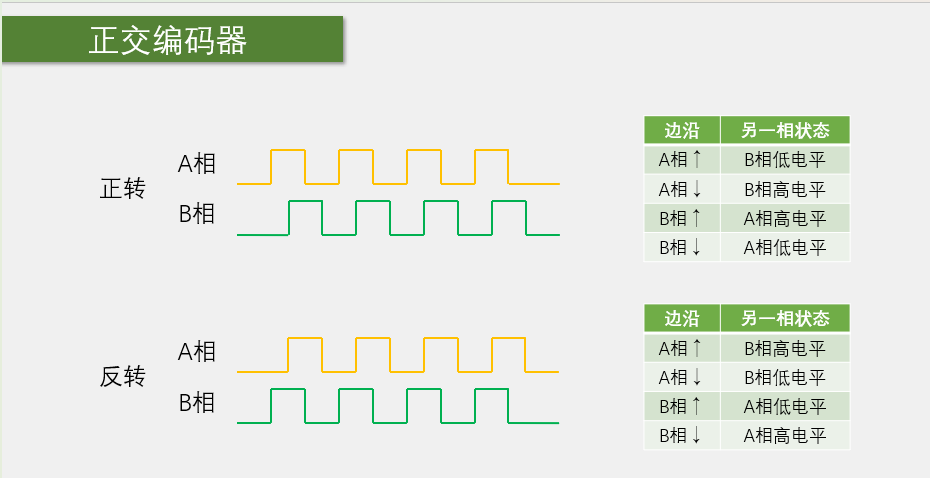
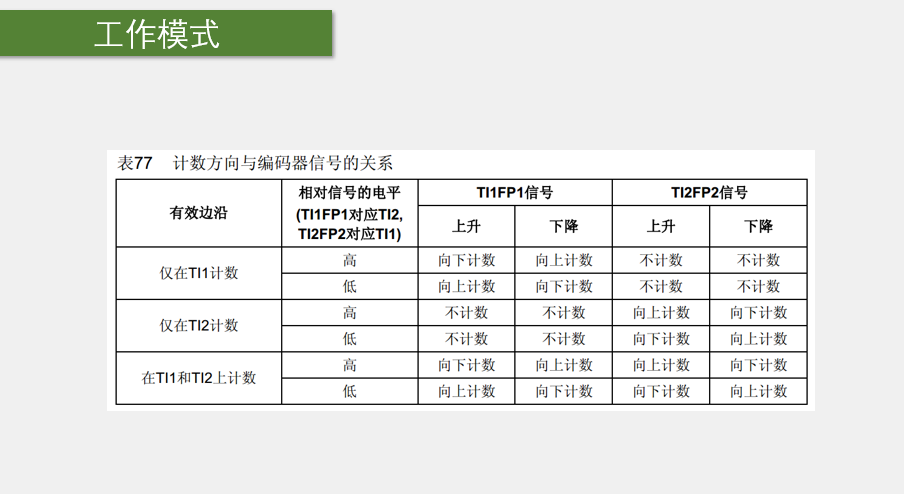
编码器接口测速
#include "stm32f10x.h" // Device header/*** 函 数:编码器初始化* 参 数:无* 返 回 值:无*/
void Encoder_Init(void)
{/*开启时钟*/RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //开启TIM3的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA6和PA7引脚初始化为上拉输入/*时基单元初始化*/TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体变量TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数TIM_TimeBaseInitStructure.TIM_Period = 65536 - 1; //计数周期,即ARR的值TIM_TimeBaseInitStructure.TIM_Prescaler = 1 - 1; //预分频器,即PSC的值TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级定时器才会用到TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure); //将结构体变量交给TIM_TimeBaseInit,配置TIM3的时基单元/*输入捕获初始化*/TIM_ICInitTypeDef TIM_ICInitStructure; //定义结构体变量TIM_ICStructInit(&TIM_ICInitStructure); //结构体初始化,若结构体没有完整赋值//则最好执行此函数,给结构体所有成员都赋一个默认值//避免结构体初值不确定的问题TIM_ICInitStructure.TIM_Channel = TIM_Channel_1; //选择配置定时器通道1TIM_ICInitStructure.TIM_ICFilter = 0xF; //输入滤波器参数,可以过滤信号抖动TIM_ICInit(TIM3, &TIM_ICInitStructure); //将结构体变量交给TIM_ICInit,配置TIM3的输入捕获通道TIM_ICInitStructure.TIM_Channel = TIM_Channel_2; //选择配置定时器通道2TIM_ICInitStructure.TIM_ICFilter = 0xF; //输入滤波器参数,可以过滤信号抖动TIM_ICInit(TIM3, &TIM_ICInitStructure); //将结构体变量交给TIM_ICInit,配置TIM3的输入捕获通道/*编码器接口配置*/TIM_EncoderInterfaceConfig(TIM3, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);//配置编码器模式以及两个输入通道是否反相//注意此时参数的Rising和Falling已经不代表上升沿和下降沿了,而是代表是否反相//此函数必须在输入捕获初始化之后进行,否则输入捕获的配置会覆盖此函数的部分配置/*TIM使能*/TIM_Cmd(TIM3, ENABLE); //使能TIM3,定时器开始运行
}/*** 函 数:获取编码器的增量值* 参 数:无* 返 回 值:自上此调用此函数后,编码器的增量值*/
int16_t Encoder_Get(void)
{/*使用Temp变量作为中继,目的是返回CNT后将其清零*/int16_t Temp;Temp = TIM_GetCounter(TIM3);TIM_SetCounter(TIM3, 0);return Temp;
}
就先这样吧,还是有些没大搞明白,等考完试,二刷的时候再回来补充。其实搞不明白的是那个图怎么拆解成老师给出的基本结构...
相关文章:
嵌入式学习--江协stm32day3
这是我目前为止认为最重要的模块--TIM定时器,这里我们主要学习通用定时器 最小的计数计时单元为时基单元,包括PSC,ARR,CNT CK_PSC(Prescaler,预分频器):作用是对输入时钟信号进行分…...

docker-记录一次容器日志<container_id>-json.log超大问题的处理
文章目录 现象一、查找源头二、分析总结 现象 同事联系说部署在虚拟机里面的用docker启动xxl-job的服务不好使了,需要解决一下,我就登陆虚拟机检查,发现根目录满了,就一层一层的找,发现是<container_id>-json.l…...

4.8.1 利用Spark SQL实现词频统计
在利用Spark SQL实现词频统计的实战中,首先需要准备单词文件并上传至HDFS。接着,可以通过交互式方法或创建Spark项目来实现词频统计。交互式方法包括读取文本文件生成数据集,扁平化映射得到新数据集,然后将数据集转成数据帧&#…...
)
头歌java课程实验(Java面向对象 - 包装类)
第1关:基本数据类型和包装类之间的转换 任务描述 本关任务:实现基本数据类型与包装类之间的互相转换。 相关知识 为了完成本关任务,你需要掌握: 1.什么是包装类; 2.怎么使用包装类。 什么是包装类 在JAVA中&#x…...

经济法-7-上市公司首次发行、配股增发条件
一、首次公开发行股票条件 事项 条件存续时间,持续经营能力 持续经营3年以上的股份公司 具有持续经营能力 内部控制制度具备健全且运行良好的组织机构财务最近3年财务会计报告被出具无保留意见审计报告公司治理 1)最近3年内,发行人及…...
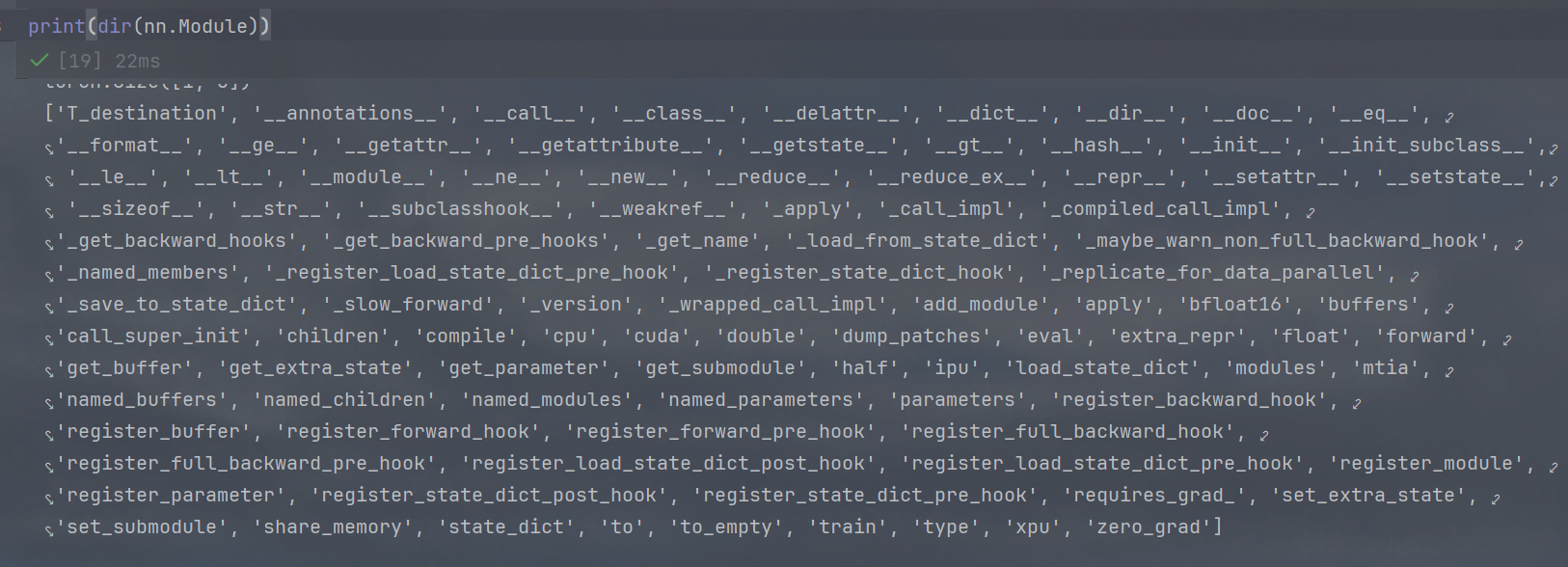
PyTorch中nn.Module详解
直接print(dir(nn.Module)),得到如下内容: 一、模型结构与参数 parameters() 用途:返回模块的所有可训练参数(如权重、偏置)。示例:for param in model.parameters():print(param.shape)named_parameters…...

Mac 每日磁盘写入量异常高
为什么你的 Mac 每日磁盘写入量异常高?深度分析与解决方案 文章目录 为什么你的 Mac 每日磁盘写入量异常高?深度分析与解决方案🔍 问题现象🕵️♂️ 六大罪魁祸首1. 系统日志疯狂输出典型场景: 2. 浏览器缓存3. Ti…...

《深入解析Go语言结构:简洁高效的工程化设计》
《深入解析Go语言结构:简洁高效的工程化设计》 引言 Go语言(Golang)由Google团队于2009年发布,专为现代分布式系统和云计算设计。其核心哲学是"简单性高于一切",通过精简的语法结构和创新的…...

[蓝桥杯]机器人塔
题目描述 X 星球的机器人表演拉拉队有两种服装,A 和 B。 他们这次表演的是搭机器人塔。 类似: A B B A B A A A B B B B B A B A B A B B A 队内的组塔规则是: A 只能站在 AA 或 BB 的肩上。 B 只能站在 AB 或 BA 的肩上。 你的…...

如何将vue2使用npm run build打包好的文件上传到服务器
要将 Vue 2 项目打包并部署到服务器上,并使用 Nginx 作为 Web 服务器,可以按照以下步骤操作: 1. 打包 Vue 2 项目 首先,确保你的 Vue 2 项目已经开发完成,并且可以在本地正常运行。然后使用以下命令进行打包…...

Ubuntu 22.04 系统下 Docker 安装与配置全指南
Ubuntu 22.04 系统下 Docker 安装与配置全指南 一、前言 Docker 作为现代开发中不可或缺的容器化工具,能极大提升应用部署和环境管理的效率。本文将详细介绍在 Ubuntu 22.04 系统上安装与配置 Docker 的完整流程,包括环境准备、安装步骤、权限配置及镜…...
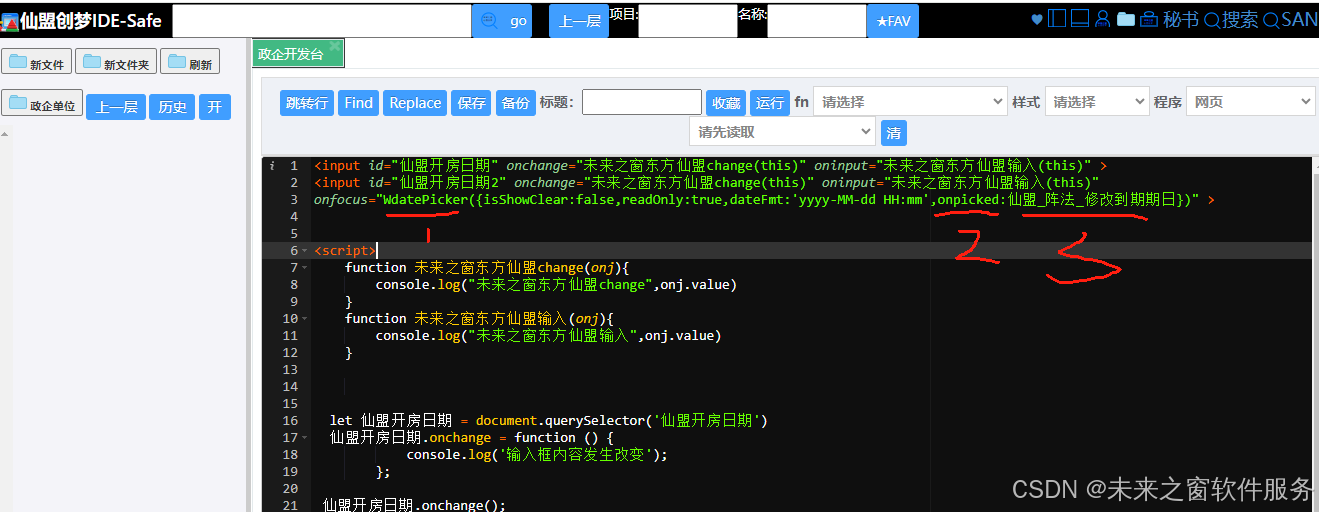
动态表单开发避坑:改变input的值不会触发change事件即时修复策略-WdatePicker ——仙盟创梦IDE
原始传统模式 onchange <input onchange"未来之窗东方仙盟change(this)" oni > <script>function 未来之窗东方仙盟change(onj){console.log("未来之窗东方仙盟change",onj.value)} </script> 测试 原始传统模式 oninput <input …...

10.安卓逆向2-frida hook技术-frida基本使用-frida指令(用于hook)
免责声明:内容仅供学习参考,请合法利用知识,禁止进行违法犯罪活动! 内容参考于:图灵Python学院 工具下载: 链接:https://pan.baidu.com/s/1bb8NhJc9eTuLzQr39lF55Q?pwdzy89 提取码࿱…...

动态设置微信小程序页面标题(navigationBarTitleText属性)
前言: 最近在公司进行小程序研发的时候,产品给出了一个动态加载页面标题的需求,经过调研之后将结果在这里与各位伙伴进行分享。 代码展示: 在.json文件中进行初始配置: { "usingComponents": {}, &q…...

前端流式接收数据讲解
前端流式接收数据全面讲解 前端流式接收数据(Streaming Data Reception)是现代 Web 应用中一个重要特性,尤其在处理实时通信、大文件传输、聊天、视频播放、实时日志监控等场景下。下面我们从概念到技术实现,再到应用示例&#x…...

Flutter下的一点实践
目录 1、背景2、refena创世纪代码3、localsend里refena的刷新3.1 初始状态3.2 发起设备扫描流程3.3 扫描过程3.3 刷新界面 4.localsend的设备扫描流程4.1 UDP广播设备注册流程4.2 TCP/HTTP设备注册流程4.3 localsend的服务器初始化工作4.4总结 1、背景 在很久以前,…...

Python训练营打卡 Day41
简单CNN 知识回顾 数据增强卷积神经网络定义的写法batch归一化:调整一个批次的分布,常用与图像数据特征图:只有卷积操作输出的才叫特征图调度器:直接修改基础学习率 卷积操作常见流程如下: 1. 输入 → 卷积层 → Batch…...

Eclipse集成lombok
一、安装 Lombok 插件(Eclipse 支持) 下载 lombok.jar: 前往官网下载页面:https://projectlombok.org/download 下载最新版本的 lombok.jar 文件。 运行 lombok.jar 配置 Eclipse: 双击下载的 lombok.jar࿰…...
)
什么是trace,分布式链路追踪(Distributed Tracing)
在你提到的 “个人免费版” 套餐中,“Trace 上报量:5 万条 / 月,存储 3 天” 里的 Trace 仍然是指 分布式链路追踪记录,但需要结合具体产品的场景来理解其含义和限制。以下是更贴近个人用户使用场景的解释: 一、这里的…...
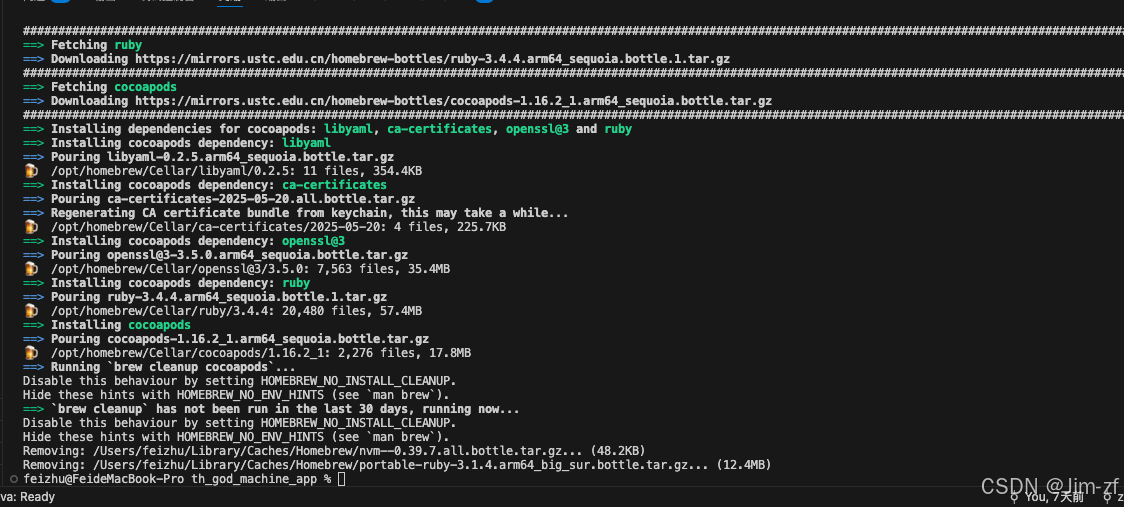
VScode ios 模拟器安装cocoapods
使用 Homebrew 安装(推荐) 如果你有 Homebrew,直接用它安装更稳定: brew install cocoapods...

Redis最佳实践——安全与稳定性保障之数据持久化详解
Redis 在电商应用的安全与稳定性保障之数据持久化全面详解 一、持久化机制深度解析 1. 持久化策略矩阵 策略触发方式数据完整性恢复速度适用场景RDB定时快照分钟级快容灾备份/快速恢复AOF实时追加日志秒级慢金融交易/订单关键操作混合模式RDBAOF同时启用秒级中等高安全要求场…...

互联网大厂Java求职面试实战:Spring Boot微服务架构及Kafka消息处理示例解析
互联网大厂Java求职面试实战:Spring Boot微服务架构及Kafka消息处理示例解析 引言 在互联网大厂的Java开发岗位面试中,考察候选人对微服务架构设计、消息队列处理及高并发处理能力是重点。本文结合Spring Boot框架和Kafka消息队列,模拟一个…...
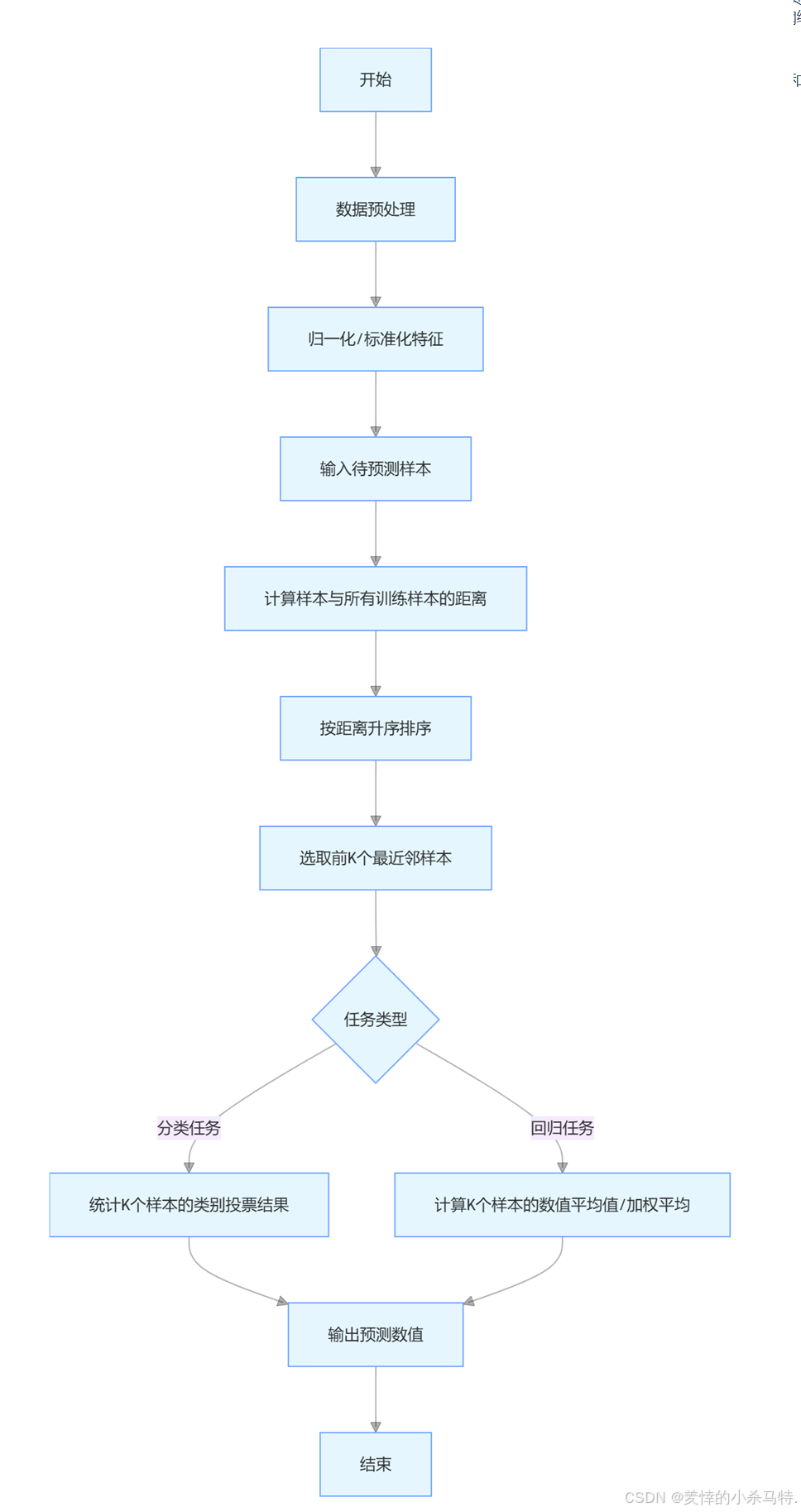
K 值选对,准确率翻倍:KNN 算法调参的黄金法则
目录 一、背景介绍 二、KNN 算法原理 2.1 核心思想 2.2 距离度量方法 2.3 算法流程 2.4算法结构: 三、KNN 算法代码实现 3.1 基于 Scikit-learn 的简单实现 3.2 手动实现 KNN(自定义代码) 四、K 值选择与可视化分析 4.1 K 值对分类…...
技术栈ES的介绍和使用
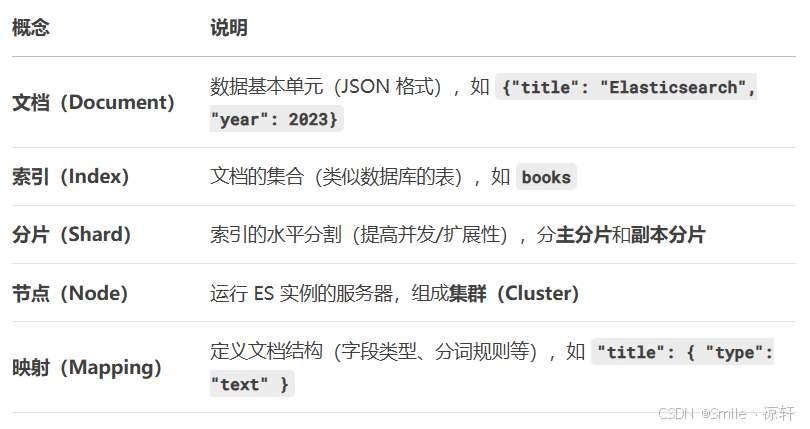
目录 1. 全文搜索引擎(Elastic Search)的由来2. Elastic Search 概述2.1 Elastic Search 介绍2.2 Elastic Search 功能2.3 Elastic Search 特点 3. 安装 Elastic Search3.1 ES 的安装3.2 安装 kibana3.3 ES 客户端的安装 4. Elastic Search 基本概念4.1 …...

跟Gemini学做PPT-模板样式的下载
好的,这里有一些推荐的网站,您可以在上面找到PPT目录样式和模板的灵感: SlideModel (slidemodel.com) 提供各种预先设计的目录幻灯片模板。这些模板100%可编辑,可用于PowerPoint和Google Slides。您可以找到不同项目数量ÿ…...
Windows版本的postgres安装插件http
1、下载安装包 这里使用安装 pgsql-http 的扩展 源码地址:GitHub - pramsey/pgsql-http: HTTP client for PostgreSQL, retrieve a web page from inside the database. 编译的安装地址:http extension for windows updated to include PostgreSQL17 …...

uni-app学习笔记十六-vue3页面生命周期(三)
uni-app官方文档页面生命周期部分位于页面 | uni-app官网。 本篇再介绍2个生命周期 1.onUnload:用于监听页面卸载。 当页面被关闭时,即页面的缓存被清掉时触发加载onUnload函数。 例如:在demo6页面点击跳转到demo4,在demo4页面回退不了到d…...
优化的两极:凸优化与非凸优化的理论、应用与挑战
在机器学习、工程设计、经济决策等众多领域,优化问题无处不在。而在优化理论的世界里,凸优化与非凸优化如同两个截然不同的 “王国”,各自有着独特的规则、挑战和应用场景。今天,就让我们深入探索这两个优化领域的核心差异、算法特…...
(五)MMA(OpenTelemetry/Rabbit MQ/ApiGateway/MongoDB)
文章目录 项目地址一、OpenTelemetry1.1 配置OpenTelemetry1. 服务添加2. 添加服务标识3. 添加请求的标识4. 添加中间价 二、Rabbit MQ2.1 配置Rabbit MQ1. docker-compose2. 添加Rabbit MQ的Connect String 2.2 替换成Rabbit MQ1. 安装所需要的包2. 使用 三、API Gateways3.1 …...
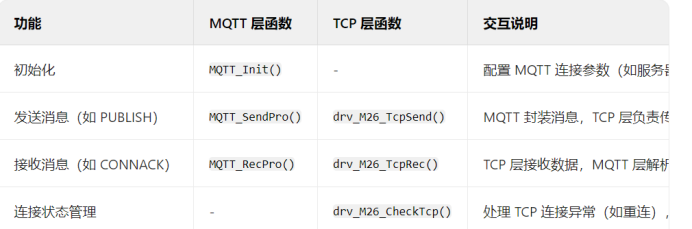
TCP通信与MQTT协议的关系
1. MQTT 处理核心(Mqtt_Pro) void Mqtt_Pro(void) { MQTT_Init(); // 初始化MQTT协议栈(连接参数、缓冲区等) MQTT_SendPro(); // 处理MQTT发送(封装消息,调用TCP发送) MQTT_RecPro();…...