Python打卡训练营学习记录Day41
DAY 41 简单CNN
知识回顾
- 数据增强
- 卷积神经网络定义的写法
- batch归一化:调整一个批次的分布,常用与图像数据
- 特征图:只有卷积操作输出的才叫特征图
- 调度器:直接修改基础学习率
卷积操作常见流程如下:
1. 输入 → 卷积层 → Batch归一化层(可选) → 池化层 → 激活函数 → 下一层
- Flatten -> Dense (with Dropout,可选) -> Dense (Output)
作业:尝试手动修改下不同的调度器和CNN的结构,观察训练的差异。
import torch
import torch.nn as nn
import torch.optim as optim
from torchvision import datasets, transforms
from torch.utils.data import DataLoader
import matplotlib.pyplot as plt
import numpy as np# 设置中文字体支持
plt.rcParams["font.family"] = ["SimHei"]
plt.rcParams['axes.unicode_minus'] = False # 解决负号显示问题# 检查GPU是否可用
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
print(f"使用设备: {device}")# 1. 数据预处理
# 训练集:使用多种数据增强方法提高模型泛化能力
train_transform = transforms.Compose([# 随机裁剪图像,从原图中随机截取32x32大小的区域transforms.RandomCrop(32, padding=4),# 随机水平翻转图像(概率0.5)transforms.RandomHorizontalFlip(),# 随机颜色抖动:亮度、对比度、饱和度和色调随机变化transforms.ColorJitter(brightness=0.2, contrast=0.2, saturation=0.2, hue=0.1),# 随机旋转图像(最大角度15度)transforms.RandomRotation(15),# 将PIL图像或numpy数组转换为张量transforms.ToTensor(),# 标准化处理:每个通道的均值和标准差,使数据分布更合理transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010))
])# 测试集:仅进行必要的标准化,保持数据原始特性,标准化不损失数据信息,可还原
test_transform = transforms.Compose([transforms.ToTensor(),transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010))
])# 2. 加载CIFAR-10数据集
train_dataset = datasets.CIFAR10(root='./data',train=True,download=True,transform=train_transform # 使用增强后的预处理
)test_dataset = datasets.CIFAR10(root='./data',train=False,transform=test_transform # 测试集不使用增强
)# 3. 创建数据加载器
batch_size = 64
train_loader = DataLoader(train_dataset, batch_size=batch_size, shuffle=True)
test_loader = DataLoader(test_dataset, batch_size=batch_size, shuffle=False)
# 4. 定义CNN模型的定义(替代原MLP)
class CNN(nn.Module):def __init__(self):super(CNN, self).__init__() # 继承父类初始化# ---------------------- 第一个卷积块 ----------------------# 卷积层1:输入3通道(RGB),输出32个特征图,卷积核3x3,边缘填充1像素self.conv1 = nn.Conv2d(in_channels=3, # 输入通道数(图像的RGB通道)out_channels=32, # 输出通道数(生成32个新特征图)kernel_size=3, # 卷积核尺寸(3x3像素)padding=1 # 边缘填充1像素,保持输出尺寸与输入相同)# 批量归一化层:对32个输出通道进行归一化,加速训练self.bn1 = nn.BatchNorm2d(num_features=32)# ReLU激活函数:引入非线性,公式:max(0, x)self.relu1 = nn.ReLU()# 最大池化层:窗口2x2,步长2,特征图尺寸减半(32x32→16x16)self.pool1 = nn.MaxPool2d(kernel_size=2, stride=2) # stride默认等于kernel_size# ---------------------- 第二个卷积块 ----------------------# 卷积层2:输入32通道(来自conv1的输出),输出64通道self.conv2 = nn.Conv2d(in_channels=32, # 输入通道数(前一层的输出通道数)out_channels=64, # 输出通道数(特征图数量翻倍)kernel_size=3, # 卷积核尺寸不变padding=1 # 保持尺寸:16x16→16x16(卷积后)→8x8(池化后))self.bn2 = nn.BatchNorm2d(num_features=64)self.relu2 = nn.ReLU()self.pool2 = nn.MaxPool2d(kernel_size=2) # 尺寸减半:16x16→8x8# ---------------------- 第三个卷积块 ----------------------# 卷积层3:输入64通道,输出128通道self.conv3 = nn.Conv2d(in_channels=64, # 输入通道数(前一层的输出通道数)out_channels=128, # 输出通道数(特征图数量再次翻倍)kernel_size=3,padding=1 # 保持尺寸:8x8→8x8(卷积后)→4x4(池化后))self.bn3 = nn.BatchNorm2d(num_features=128)self.relu3 = nn.ReLU() # 复用激活函数对象(节省内存)self.pool3 = nn.MaxPool2d(kernel_size=2) # 尺寸减半:8x8→4x4# ---------------------- 全连接层(分类器) ----------------------# 计算展平后的特征维度:128通道 × 4x4尺寸 = 128×16=2048维self.fc1 = nn.Linear(in_features=128 * 4 * 4, # 输入维度(卷积层输出的特征数)out_features=512 # 输出维度(隐藏层神经元数))# Dropout层:训练时随机丢弃50%神经元,防止过拟合self.dropout = nn.Dropout(p=0.5)# 输出层:将512维特征映射到10个类别(CIFAR-10的类别数)self.fc2 = nn.Linear(in_features=512, out_features=10)def forward(self, x):# 输入尺寸:[batch_size, 3, 32, 32](batch_size=批量大小,3=通道数,32x32=图像尺寸)# ---------- 卷积块1处理 ----------x = self.conv1(x) # 卷积后尺寸:[batch_size, 32, 32, 32](padding=1保持尺寸)x = self.bn1(x) # 批量归一化,不改变尺寸x = self.relu1(x) # 激活函数,不改变尺寸x = self.pool1(x) # 池化后尺寸:[batch_size, 32, 16, 16](32→16是因为池化窗口2x2)# ---------- 卷积块2处理 ----------x = self.conv2(x) # 卷积后尺寸:[batch_size, 64, 16, 16](padding=1保持尺寸)x = self.bn2(x)x = self.relu2(x)x = self.pool2(x) # 池化后尺寸:[batch_size, 64, 8, 8]# ---------- 卷积块3处理 ----------x = self.conv3(x) # 卷积后尺寸:[batch_size, 128, 8, 8](padding=1保持尺寸)x = self.bn3(x)x = self.relu3(x)x = self.pool3(x) # 池化后尺寸:[batch_size, 128, 4, 4]# ---------- 展平与全连接层 ----------# 将多维特征图展平为一维向量:[batch_size, 128*4*4] = [batch_size, 2048]x = x.view(-1, 128 * 4 * 4) # -1自动计算批量维度,保持批量大小不变x = self.fc1(x) # 全连接层:2048→512,尺寸变为[batch_size, 512]x = self.relu3(x) # 激活函数(复用relu3,与卷积块3共用)x = self.dropout(x) # Dropout随机丢弃神经元,不改变尺寸x = self.fc2(x) # 全连接层:512→10,尺寸变为[batch_size, 10](未激活,直接输出logits)return x # 输出未经过Softmax的logits,适用于交叉熵损失函数# 初始化模型
model = CNN()
#model = model.to(device) # 将模型移至GPU(如果可用)
# 5. 定义损失函数和优化器
criterion = nn.CrossEntropyLoss() # 交叉熵损失函数,适用于多分类任务
optimizer = optim.Adam(model.parameters(), lr=0.001) # Adam优化器,学习率0.001
# 引入学习率调度器,在训练过程中动态调整学习率--训练初期使用较大的 LR 快速降低损失,训练后期使用较小的 LR 更精细地逼近全局最优解。
# 在每个 epoch 结束后,需要手动调用调度器来更新学习率,可以在训练过程中调用 scheduler.step()
scheduler = optim.lr_scheduler.ReduceLROnPlateau(optimizer, # 指定要控制的优化器(这里是Adam)mode='min', # 监测的指标是"最小化"(如损失函数)patience=3, # 如果连续3个epoch指标没有改善,才降低LRfactor=0.5 # 降低LR的比例(新LR = 旧LR × 0.5)
)
# scheduler = optim.lr_scheduler.StepLR(optimizer, step_size=5, gamma=0.1)
# # 每5个epoch,LR = LR × 0.1 # scheduler = optim.lr_scheduler.MultiStepLR(optimizer, milestones=[10, 20, 30], gamma=0.5)
# # 当epoch=10、20、30时,LR = LR × 0.5 # scheduler = optim.lr_scheduler.CosineAnnealingLR(optimizer, T_max=10, eta_min=0.0001)
# # LR在[0.0001, LR_initial]之间按余弦曲线变化,周期为2×T_max
# 5. 训练模型(记录每个 iteration 的损失)
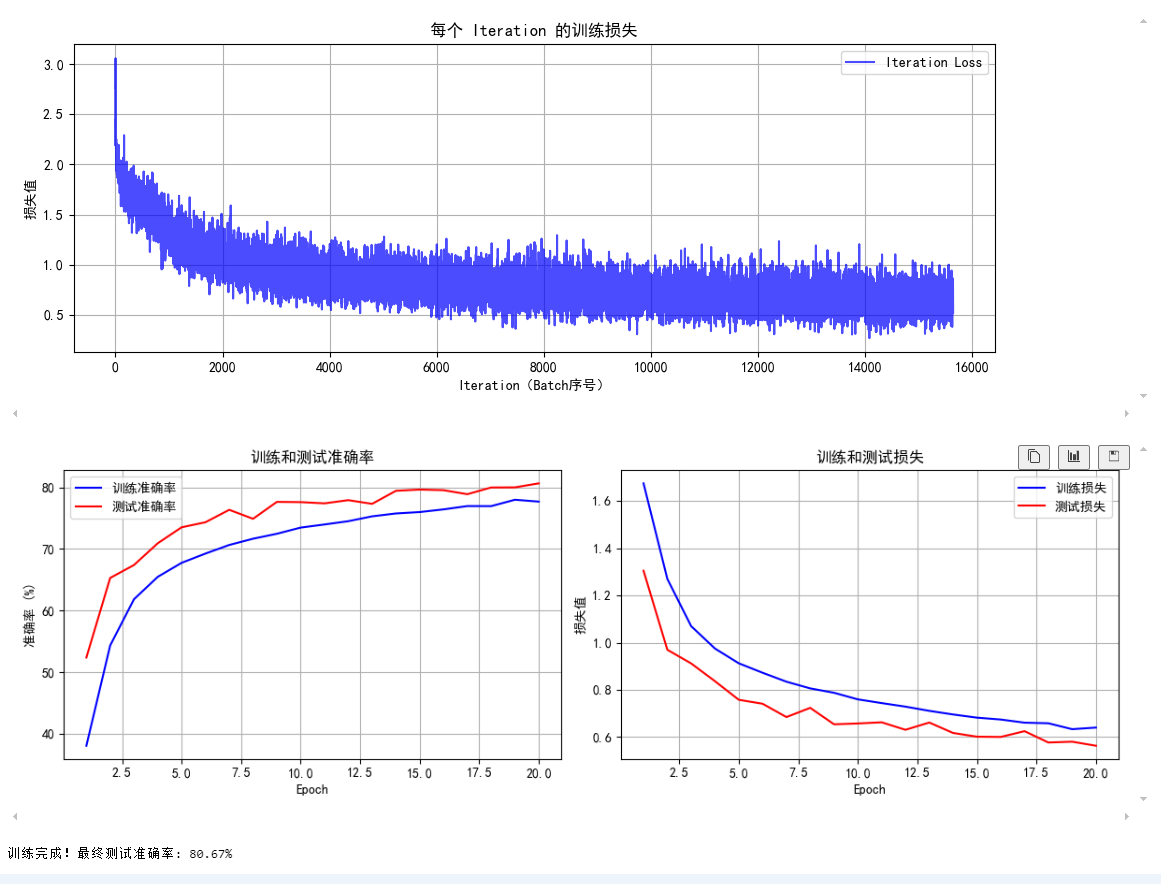
def train(model, train_loader, test_loader, criterion, optimizer, scheduler, device, epochs):model.train() # 设置为训练模式# 记录每个 iteration 的损失all_iter_losses = [] # 存储所有 batch 的损失iter_indices = [] # 存储 iteration 序号# 记录每个 epoch 的准确率和损失train_acc_history = []test_acc_history = []train_loss_history = []test_loss_history = []for epoch in range(epochs):running_loss = 0.0correct = 0total = 0for batch_idx, (data, target) in enumerate(train_loader):data, target = data.to(device), target.to(device) # 移至GPUoptimizer.zero_grad() # 梯度清零output = model(data) # 前向传播loss = criterion(output, target) # 计算损失loss.backward() # 反向传播optimizer.step() # 更新参数# 记录当前 iteration 的损失iter_loss = loss.item()all_iter_losses.append(iter_loss)iter_indices.append(epoch * len(train_loader) + batch_idx + 1)# 统计准确率和损失running_loss += iter_loss_, predicted = output.max(1)total += target.size(0)correct += predicted.eq(target).sum().item()# 每100个批次打印一次训练信息if (batch_idx + 1) % 100 == 0:print(f'Epoch: {epoch+1}/{epochs} | Batch: {batch_idx+1}/{len(train_loader)} 'f'| 单Batch损失: {iter_loss:.4f} | 累计平均损失: {running_loss/(batch_idx+1):.4f}')# 计算当前epoch的平均训练损失和准确率epoch_train_loss = running_loss / len(train_loader)epoch_train_acc = 100. * correct / totaltrain_acc_history.append(epoch_train_acc)train_loss_history.append(epoch_train_loss)# 测试阶段model.eval() # 设置为评估模式test_loss = 0correct_test = 0total_test = 0with torch.no_grad():for data, target in test_loader:data, target = data.to(device), target.to(device)output = model(data)test_loss += criterion(output, target).item()_, predicted = output.max(1)total_test += target.size(0)correct_test += predicted.eq(target).sum().item()epoch_test_loss = test_loss / len(test_loader)epoch_test_acc = 100. * correct_test / total_testtest_acc_history.append(epoch_test_acc)test_loss_history.append(epoch_test_loss)# 更新学习率调度器scheduler.step(epoch_test_loss)print(f'Epoch {epoch+1}/{epochs} 完成 | 训练准确率: {epoch_train_acc:.2f}% | 测试准确率: {epoch_test_acc:.2f}%')# 绘制所有 iteration 的损失曲线plot_iter_losses(all_iter_losses, iter_indices)# 绘制每个 epoch 的准确率和损失曲线plot_epoch_metrics(train_acc_history, test_acc_history, train_loss_history, test_loss_history)return epoch_test_acc # 返回最终测试准确率# 6. 绘制每个 iteration 的损失曲线
def plot_iter_losses(losses, indices):plt.figure(figsize=(10, 4))plt.plot(indices, losses, 'b-', alpha=0.7, label='Iteration Loss')plt.xlabel('Iteration(Batch序号)')plt.ylabel('损失值')plt.title('每个 Iteration 的训练损失')plt.legend()plt.grid(True)plt.tight_layout()plt.show()# 7. 绘制每个 epoch 的准确率和损失曲线
def plot_epoch_metrics(train_acc, test_acc, train_loss, test_loss):epochs = range(1, len(train_acc) + 1)plt.figure(figsize=(12, 4))# 绘制准确率曲线plt.subplot(1, 2, 1)plt.plot(epochs, train_acc, 'b-', label='训练准确率')plt.plot(epochs, test_acc, 'r-', label='测试准确率')plt.xlabel('Epoch')plt.ylabel('准确率 (%)')plt.title('训练和测试准确率')plt.legend()plt.grid(True)# 绘制损失曲线plt.subplot(1, 2, 2)plt.plot(epochs, train_loss, 'b-', label='训练损失')plt.plot(epochs, test_loss, 'r-', label='测试损失')plt.xlabel('Epoch')plt.ylabel('损失值')plt.title('训练和测试损失')plt.legend()plt.grid(True)plt.tight_layout()plt.show()# 8. 执行训练和测试
epochs = 20 # 增加训练轮次以获得更好效果
print("开始使用CNN训练模型...")
final_accuracy = train(model, train_loader, test_loader, criterion, optimizer, scheduler, device, epochs)
print(f"训练完成!最终测试准确率: {final_accuracy:.2f}%")# # 保存模型
# torch.save(model.state_dict(), 'cifar10_cnn_model.pth')
# print("模型已保存为: cifar10_cnn_model.pth")
 @浙大疏锦行
@浙大疏锦行
相关文章:
Python打卡训练营学习记录Day41
DAY 41 简单CNN 知识回顾 数据增强卷积神经网络定义的写法batch归一化:调整一个批次的分布,常用与图像数据特征图:只有卷积操作输出的才叫特征图调度器:直接修改基础学习率 卷积操作常见流程如下: 1. 输入 → 卷积层 →…...

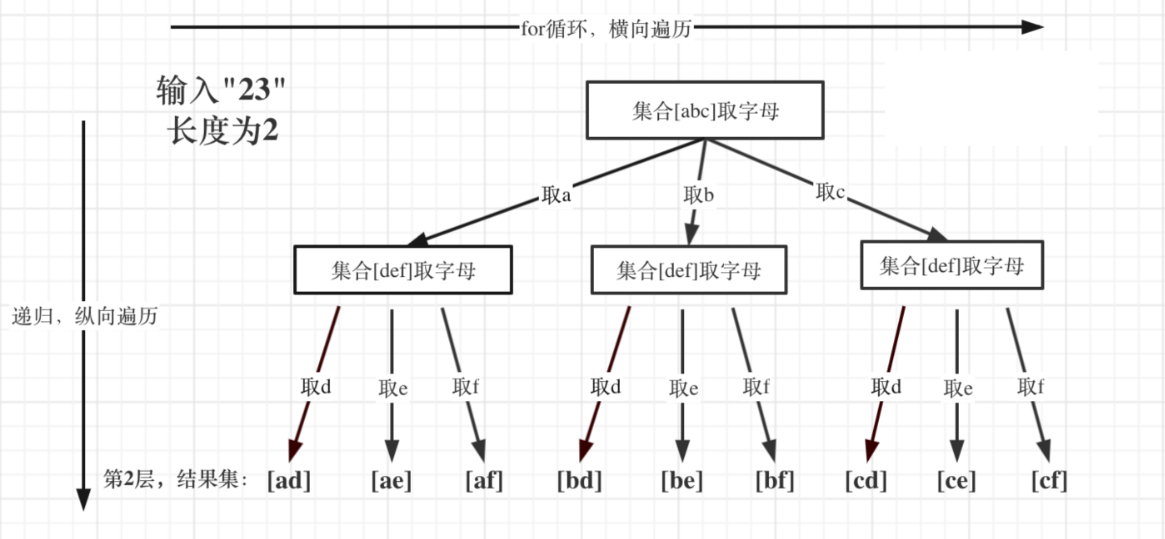
单链表反序实现
这个算法题有两种实现方式,一种是迭代,就是循环,还有一种是递归实现 迭代实现 迭代实现原理上是在一个循环如for中依次将一个节点的方向改变达到原地反序的实现 迭代法的核心是使用三个指针(prev, curr, next)逐个…...

C++深入类与对象
在上一篇中提到了构造函数,那么这篇再来提一下构造函数,编译器自动生成的默认构造函数对于内置类型不做处理,自定义类型会调用它自己的构造函数。对于自己写的构造函数,之前是在函数体中初始化,当然不止这一种初始化&a…...
)
机器学习算法04:SVC 算法(向量机分类)
目录 一、算法核心特点 二、使用场景 三、代码示例(以 Python 的 scikit - learn 库为例) 四、与其他分类算法对比 SVC 即 Support Vector Classification,是支持向量机(SVM)在分类任务中的具体实现。在你正在阅读…...

Fragment事务commit与commitNow区别
在 Android 的 Fragment 事务处理中,commit() 和 commitNow() 是两种提交事务的方式,它们的区别主要体现在执行时机、事务顺序和兼容性等方面。以下是它们的核心区别: 1. 执行时机 commit() 将事务异步加入主线程的待执行队列。不会立即执行&…...

LVS-DR高可用-Keepalived
目录 Keepalved双机热备 核心概念 关键组件 工作流程 实例环境 配置keepalived Web服务器配置 Keepalved双机热备 Keepalived双机热备是一种基于VRRP(Virtual Router Redundancy Protocol,虚拟路由冗余协议)实现的高可用性解决方案&am…...

阿里云服务器邮件发送失败(dail tcp xxxx:25: i/o timeout)因为阿里云默认禁用 25 端口
最近在测试发送邮件的功能,发现了一个奇怪的问题,同样的 docker 镜像,在本地跑起来是可以正常发送邮件的,但是在阿里云的服务器上跑,就会报错 i/o timeout。 排查了一圈发现,原来是阿里云的操作࿰…...
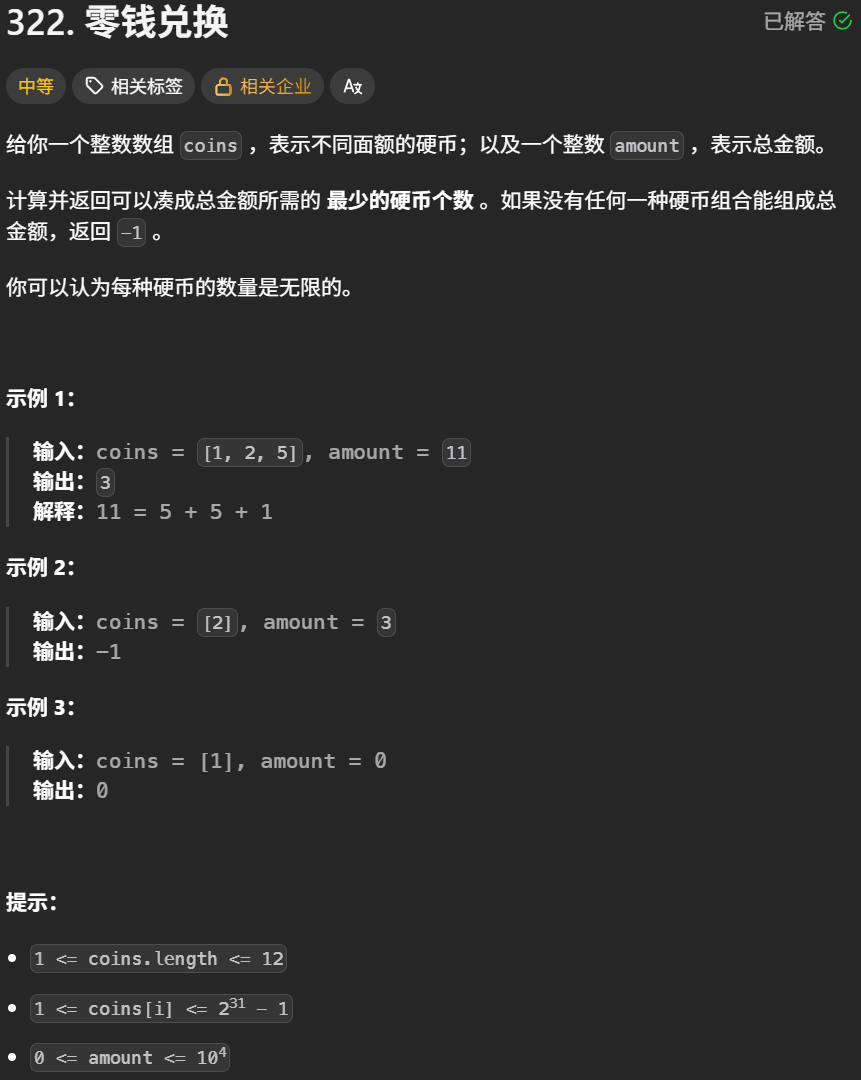
力扣HOT100之动态规划:322. 零钱兑换
这道题和上一道题279.完全平方数的套路是完全一样的,但是这道题不需要我们自己生成物品列表,函数的输入中已经给出了,但是这道题有一个坑,就是我们在初始化dp数组的时候,所有的位置不应该赋值为INT_MAX,因为…...

电商售后服务系统与其他系统集成:实现售后流程自动化
在竞争激烈的电商市场中,优质的售后服务对于提升用户满意度和忠诚度至关重要。然而,售后服务流程通常涉及多个环节和系统,如何高效地管理这些流程,减少人工干预,提升服务效率,是电商企业亟待解决的问题。电…...
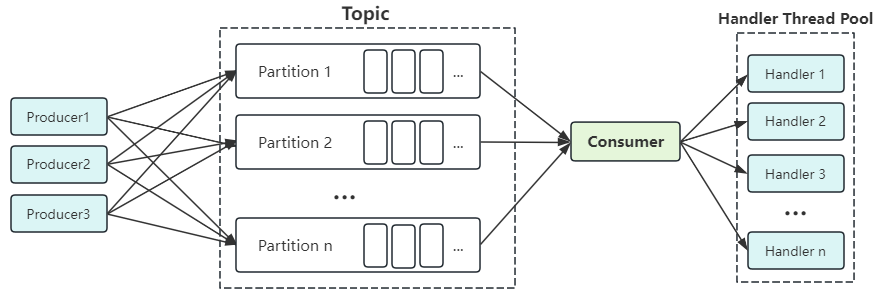
kafka学习笔记(三、消费者Consumer使用教程——消费性能多线程提升思考)
1.简介 KafkaConsumer是非线程安全的,它定义了一个acquire()方法来检测当前是否只有一个线程在操作,如不是则会抛出ConcurrentModifcationException异常。 acquire()可以看做是一个轻量级锁,它仅通过线程操作计数标记的方式来检测线程是否发…...

mongodb删除字段
删除普通字段 db.table.updateManay({}, {"$unset":{"要删除的字段": 1}})删除EmbeddedDocument字段 db.table.updateManay({}, {"$unset":{"models.name": 1}})models是个列表也可以这样删除字段 数据示例: { "m…...

[JVM] JVM内存调优
🌸个人主页:https://blog.csdn.net/2301_80050796?spm1000.2115.3001.5343 🏵️热门专栏: 🧊 Java基本语法(97平均质量分)https://blog.csdn.net/2301_80050796/category_12615970.html?spm1001.2014.3001.5482 🍕 Collection与…...

Liunx部署ES单机集群
ES 7.17.26 为例 一、单机 下载ES安装包 下载地址 wget https://artifacts.elastic.co/downloads/elasticsearch/elasticsearch-7.17.26-linux-x86_64.tar.gz wget https://artifacts.elastic.co/downloads/elasticsearch/elasticsearch-7.17.26-linux-x86_64.tar.gz.sha512…...

秒出PPT正式改名秒出AI,开启AI赋能新体验!
在现代办公环境中,借助智能工具提升工作效率已经成为趋势。秒出AI作为一款集AI PPT制作、动画、巨幕、视频、设计以及智能简历功能于一体的综合办公平台,为用户提供一站式智能内容生成解决方案,极大地简化了内容创作流程。 1. AI驱动的一键P…...

Unity中的AudioManager
1.先贴代码 using UnityEngine; using System.Collections.Generic; using System.Collections; using UnityEngine.SceneManagement;public class AudioManager : MonoSingleton<AudioManager> {[Header("Audio Settings")][SerializeField] private int ini…...
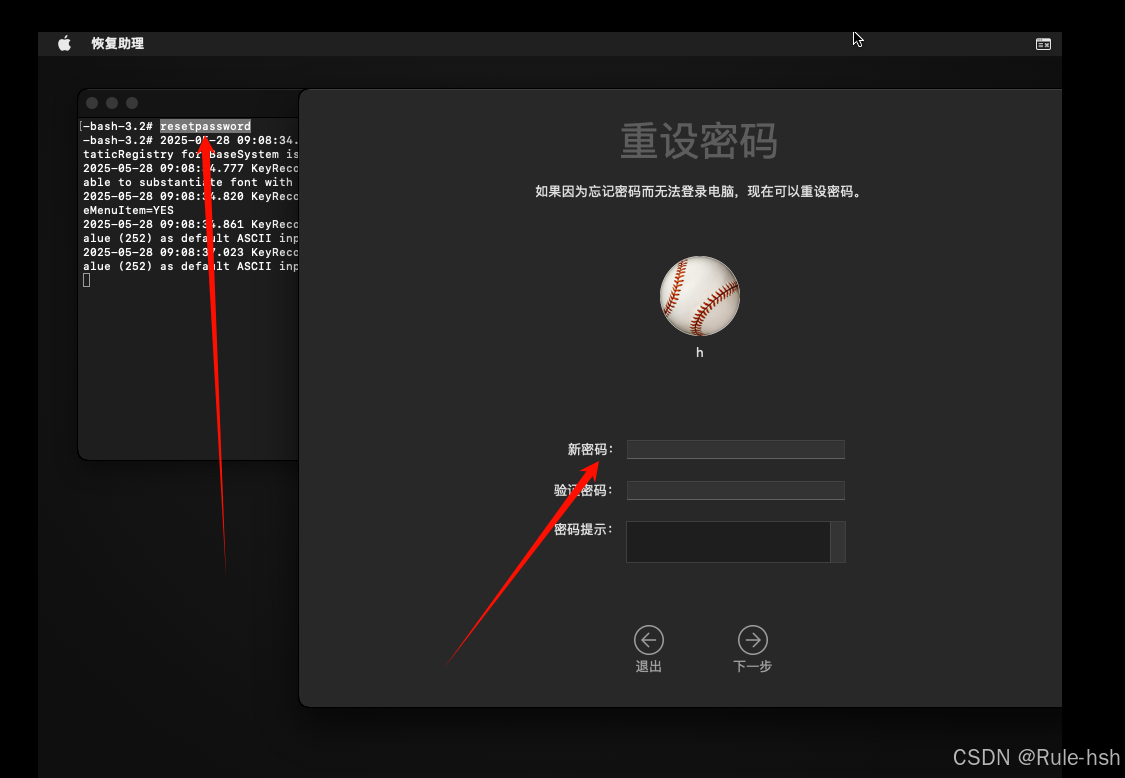
VM改MAC电脑密码(截图)
进入恢复模式重置密码 重启mac并同时按下CommandR,进入恢复模式。进入「菜单栏-实用程序-终端」,输入命令「resetpassword」回车运行,调出密码重置工具。选择包含密码的启动磁盘卷宗、需重设密码的用户账户;输入并确认新的用户密…...
SpringBoot+Vue+微信小程序校园自助打印系统
概述 校园自助打印系统是现代化校园建设中不可或缺的一部分,基于SpringBootVue微信小程序开发的免费Java源码项目,包含完整的用户预约、打印店管理等功能模块。 主要内容 系统功能模块 登录验证模块:…...

【论文精读】2024 CVPR--Upscale-A-Video现实世界视频超分辨率(RealWorld VSR)
文章目录 一、摘要二、挑战三、Method3.1 前置知识3.1.1 预训练SD 4 Upscaler3.1.2 Inflated 2D Convolution 扩展2D卷积 3.2 Local Consistency within Video Segments 视频片段中的一致性3.2.1 微调时序U-Net3.2.2 微调时序VAE-Decoder 3.3 跨片段的全局一致性 Global Consis…...

学术合作交流
想找志同道合的科研小伙伴!研究方向包括:计算机视觉(CV)、人工智能(AI)、目标检测、行人重识别、行人搜索、虹膜识别等。欢迎具备扎实基础的本科、硕士及博士生加入,共同致力于高质量 SCI 期刊和…...

【线上故障排查】Redis缓存与数据库中数据不一致问题的排查与同步策略优化
一、高频面试题 Redis缓存与数据库数据不一致的原因有哪些? 更新顺序问题:在读写并发场景下,若先更新缓存后更新数据库,此时其他读请求获取到的是旧的缓存数据;若先更新数据库后更新缓存,在更新缓存前其他读请求获取到的是旧数据,都可能导致数据不一致。缓存失效异常:缓…...

【Git命令】
基础命令 #初始化项目 git init #码云复制的路径,将本地仓库和码 云上的仓库关联起来 git remote add origin https://gitee.com/xx/xx.git#使用令牌 git remote set-url origin https://your-username:your-tokengithub.com/your-username/your-repository.gitgi…...

【LUT技术专题】图像自适应3DLUT
3DLUT开山之作: Learning Image-adaptive 3D Lookup Tables for High Performance Photo Enhancement in Real-time(2020 TPAMI ) 专题介绍一、研究背景二、图像自适应3DLUT方法2.1 前置知识2.2 整体流程2.3 损失函数的设计 三、实验结果四、局限五、总结…...
德拜温度热容推导
目录 一、背景与基本假设 一、态密度的定义 二、从波矢空间出发 三、振动模式数与波矢体积关系 四、模式总数计算 五、态密度求导 六、德拜频率确定与归一化条件 二、内能表达式的推导 三、态密度代入与变量替换 四、求比热容 五、低温时() …...

扫一扫的时候会经历哪些事
“扫一扫”功能(通常指扫描二维码或条形码)是一个看似简单但背后涉及多个步骤的过程。具体会做的事情取决于你使用的APP和扫描的码的类型(二维码最常见),但核心流程通常包括以下步骤: 启动摄像头并获取图像…...
(17))
Typescript学习教程,从入门到精通,TypeScript 泛型与类型操作详解(二)(17)
TypeScript 泛型与类型操作详解(二) 本文将详细介绍 TypeScript 中的一些高级类型特性,包括条件类型、分布式条件类型、infer 关键字、内置工具类型、类型查询、类型断言、类型细化和类型守卫等。 1. 条件类型(Conditional Type…...

【iOS】源码阅读(五)——类类的结构分析
文章目录 前言类的分析类的本质objc_class 、objc_object和NSObjectobjc_object:所有对象的基类型objc_class:类的底层结构NSObject:面向用户的根类 小结 指针内存偏移普通指针----值拷贝对象----指针拷贝或引用拷贝用数组指针引出----内存偏…...
基于CangjieMagic的RAG技术赋能智能问答系统
目录 引言 示例程序分析 代码结构剖析 导入模块解读 智能体配置详情 提示词模板说明 主程序功能解析 异步聊天功能实现 检索信息展示 技术要点总结 ollama 本地部署nomic-embed-text 运行测试 结语 引言 这段时间一直在学习CangjieMagic。前几天完成了在CangjieMa…...

算力租赁革命:弹性模式如何重构数字时代的创新门槛
一、算力革命:第四次工业革命的核心驱动力 在科技飞速发展的当下,我们正悄然迎来第四次工业革命。华为创始人任正非在一场程序设计竞赛中曾深刻指出,这场革命的基础便是大算力。随着 5G、人工智能、大数据、物联网等信息技术的迅猛发展&am…...
图论回溯
图论 200.岛屿数量DFS 给你一个由 ‘1’(陆地)和 ‘0’(水)组成的的二维网格,请你计算网格中岛屿的数量。岛屿总是被水包围,并且每座岛屿只能由水平方向和/或竖直方向上相邻的陆地连接形成。此外ÿ…...

使用arthas热替换在线运行的java class文件
如果我们在线的系统有问题,但又无法停机进行发版或者仅仅改了一个java文件需要验证一下功能是否正常,这时可以使用arthas的在线热替换功能来做class文件的在线变更。 1.运行java -jar arthas-boot.jar,启动arathas,并选择正在运行的java的进…...