Unity 模拟高度尺系统开发详解——实现拖动、范围限制、碰撞吸附与本地坐标轴选择
内容将会持续更新,有错误的地方欢迎指正,谢谢!
| 拥有更好的学习体验 —— 不断努力,不断进步,不断探索 |
| 助力快速掌握 物理引擎 学习 为初学者节省宝贵的学习时间,避免困惑! |
前言:
在Unity开发中,构建一个可交互的高度尺控制器是许多3D工具类项目中的常见需求。本文将基于最新的 HeightGaugeController.cs 脚本,详细介绍如何通过 鼠标拖拽、坐标转换、触发器碰撞检测和轴向限制 实现一个完整的高度尺系统。
文章目录
- 🧭 一、项目背景与目标
- 🛠️ 二、对象层级结构与组件配置
- 1. 场景层级结构建议如下:
- 2. 关键组件说明
- 🔧 三、核心功能解析
- 1. 拖动逻辑
- 2. 限定上下范围
- 3. 碰撞检测并吸附表面
- 4. 使用本地坐标,支持轴向选择
- 5. 屏幕坐标 → 世界坐标 → 本地坐标转换(关键逻辑)
- 📐 四、核心函数 GetMeasurePos() 解析
- 📌 五、变量管理与状态同步
- 💡 六、自定义组件:MeasurementObject.cs
- ⚙️ 七、完整代码清单(含注释)
- 八、项目地址
🧭 一、项目背景与目标
在工业仿真、VR/AR 教学或虚拟装配场景中,我们经常需要模拟现实中的“高度尺”、“卡尺”等测量工具。
本教程将带你一步步实现一个 Unity 中的高度尺模拟系统 ,支持:
✅ 鼠标拖动爪子
✅ 精准限制移动范围(上下限)
✅ 碰撞物体后自动吸附表面
✅ 支持 X/Y/Z 轴向选择
✅ 使用本地坐标系,确保旋转不影响方向
✅ 屏幕坐标 → 世界坐标 → 本地坐标准确转换
✅ 对象层级结构与设置说明

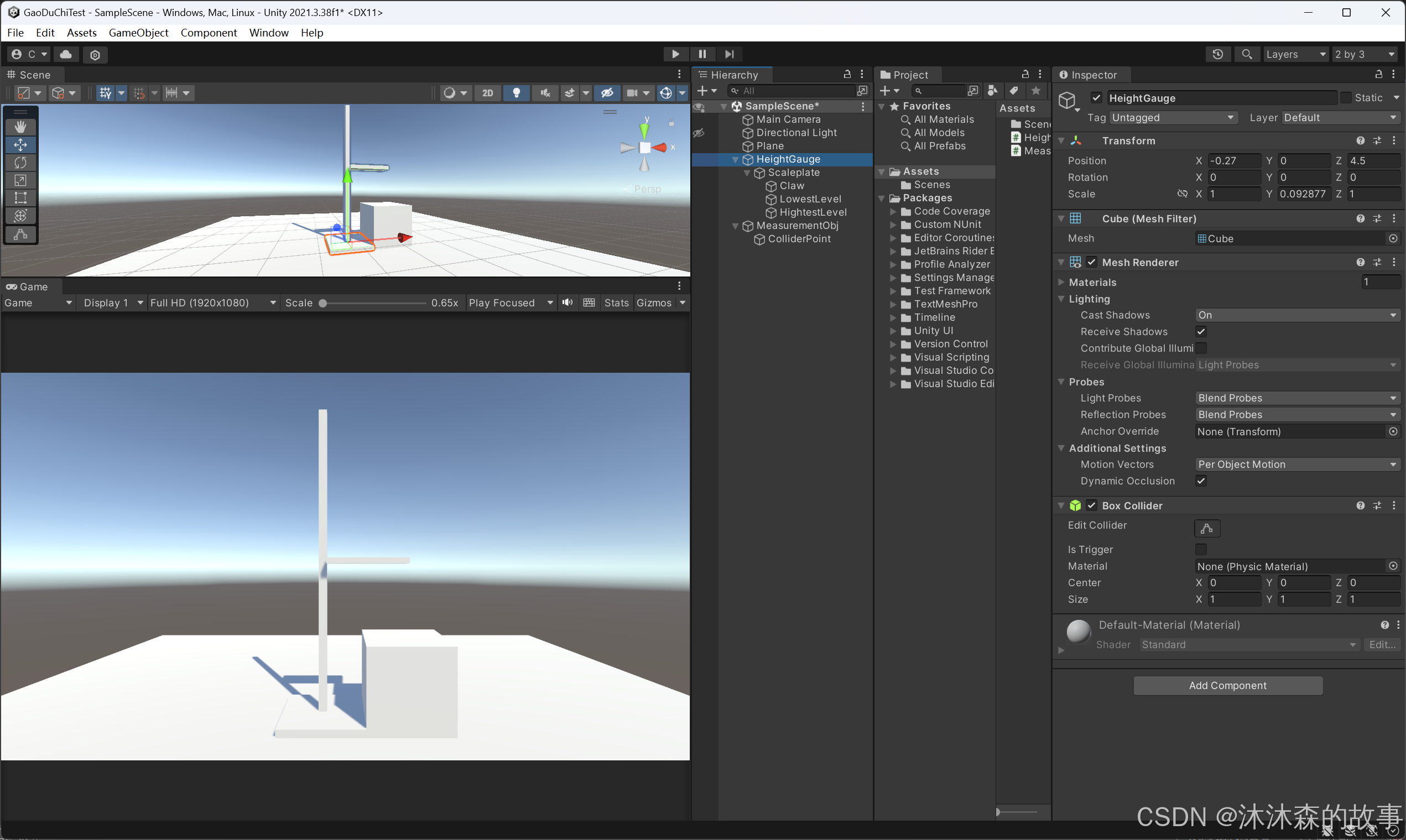
🛠️ 二、对象层级结构与组件配置
1. 场景层级结构建议如下:
HeightGauge(空对象)
├──Scaleplate
│ ├── Claw (爪子)
│ │── ├── BoxCollider(勾选 isTrigger)
│ └── └── HeightGaugeController.cs
│ │── LowestLevel (底部刻度点)
│ └── └── Transform.localPosition.y = 0(作为参考点)
│ ├── HighestLevel (顶部刻度点)
│ └── └── Transform.localPosition.y = 10(作为上限)
MeasurementObject (被测物体) └── Collider + MeasurementObject.cs(定义接触面位置)
2. 关键组件说明
| BoxCollider (勾选 isTrigger ) | 用于触发检测,判断是否点击或碰到物体 |
| HeightGaugeController.cs | 核心脚本,控制拖动、限制、吸附、坐标转换 |
| MeasurementObject.cs | 提供触碰时的表面位置 |
🔧 三、核心功能解析
1. 拖动逻辑
private bool RaycastGrabClaw()
{Ray ray = Camera.main.ScreenPointToRay(Input.mousePosition);RaycastHit hit;if (Physics.Raycast(ray, out hit) && hit.transform == transform){return true;}return false;
}
原理说明:
- 使用射线检测判断是否点击到了当前爪子对象
- 如果返回 true,表示可以开始拖动
- 记录初始鼠标位置和爪子位置,用于后续计算偏移量
2. 限定上下范围
newPosition.y = Mathf.Clamp(newPosition.y, lowestLevel.localPosition.y, highestLevel.localPosition.y);
实现逻辑:
- 在 GetMeasurePos() 中对新位置做 Mathf.Clamp() 限制
- 确保不会超出标尺上下限
- 支持 X/Y/Z 轴自由切换
3. 碰撞检测并吸附表面
使用 Trigger 系统来检测是否接触到测量物体,并记录其表面位置:
private void OnTriggerStay(Collider other)
{if (((1 << other.gameObject.layer) & collisionLayer.value) != 0){isClawColliding = true;MeasurementObject measurement = other.GetComponent<MeasurementObject>();colliderPosition = measurement.surface.position;}
}private void OnTriggerExit(Collider other)
{if (((1 << other.gameObject.layer) & collisionLayer.value) != 0){isClawColliding = false;colliderPosition = Vector3.zero;}
}
吸附逻辑:
- 判断是否是向下移动
-若发生碰撞,则更新位置为接触点 - 不允许继续下移,但允许上移
if (newPosition.y <= clawTargetPos.y && isClawColliding)
{newPosition.y = clawTargetPos.y;
}
4. 使用本地坐标,支持轴向选择
public enum MeasurementAxis
{X,Y,Z
}
根据枚举值动态选择轴向:
switch (measurementAxis)
{case MeasurementAxis.X:// X 方向移动逻辑break;case MeasurementAxis.Y:// Y 方向移动逻辑break;case MeasurementAxis.Z:// Z 方向移动逻辑break;
}
优点:
- 爪子即使旋转也不会影响移动方向
- 支持横版、竖版等多种测量方式
5. 屏幕坐标 → 世界坐标 → 本地坐标转换(关键逻辑)
float GetDepthInCameraSpace()
{return Vector3.Dot(transform.position - Camera.main.transform.position, Camera.main.transform.forward);
}Vector3 ScenePointToLocalPoint()
{float depth = GetDepthInCameraSpace();Vector3 worldPos = Camera.main.ScreenToWorldPoint(new Vector3(Input.mousePosition.x, Input.mousePosition.y, depth));return WordPointToLocalPoint(worldPos);
}private Vector3 WordPointToLocalPoint(Vector3 worldPosition)
{return transform.parent.InverseTransformPoint(worldPosition);
}
转换流程:
- 获取相机到爪子的 Z 轴投影作为深度值
- 使用 ScreenToWorldPoint 转换屏幕坐标为世界坐标
- 再通过 InverseTransformPoint 转换为父级下的本地坐标
📌 注意:
- 深度值不能直接用 Input.mousePosition.z,而是要用相机空间中的 Z 投影
- 这样才能保证坐标转换准确无误
📐 四、核心函数 GetMeasurePos() 解析
private Vector3 GetMeasurePos()
{Vector3 newPosition = Vector3.zero;switch (measurementAxis){case MeasurementAxis.X:newPosition = clawInitialPos + new Vector3(delta.x, 0, 0);newPosition.x = Mathf.Clamp(newPosition.x, lowestLevel.localPosition.x, highestLevel.localPosition.x);if (newPosition.x <= clawTargetPos.x && isClawColliding){newPosition.x = clawTargetPos.x;}break;case MeasurementAxis.Y:newPosition = clawInitialPos + new Vector3(0, delta.y, 0);newPosition.y = Mathf.Clamp(newPosition.y, lowestLevel.localPosition.y, highestLevel.localPosition.y);if (newPosition.y <= clawTargetPos.y && isClawColliding){newPosition.y = clawTargetPos.y;}break;case MeasurementAxis.Z:newPosition = clawInitialPos + new Vector3(0, 0, delta.z);newPosition.z = Mathf.Clamp(newPosition.z, lowestLevel.localPosition.z, highestLevel.localPosition.z);if (newPosition.z <= clawTargetPos.z && isClawColliding){newPosition.z = clawTargetPos.z;}break;}return newPosition;
}
流程说明:
- 获取增量 :delta = mouseCurrentPos - mouseInitialPos
- 计算新位置 :基于初始位置 + 增量
- 限制范围 :使用 Mathf.Clamp() 防止越界
- 碰撞处理 :如果是向下移动且发生碰撞,禁止进一步下移
📌 五、变量管理与状态同步
为了避免松开鼠标后仍执行一次赋值导致误动作,加入了状态同步机制:
private void ResetVariables()
{mouseCurentPos = Vector3.zero;mouseInitialPos = Vector3.zero;clawInitialPos = Vector3.zero;clawTargetPos = Vector3.zero;delta = Vector3.zero;
}
并在松开鼠标时调用:
if (Input.GetMouseButtonUp(0))
{isDragging = false;ResetVariables();
}
💡 六、自定义组件:MeasurementObject.cs
为了让测量物体能提供“表面位置”,我们创建一个辅助类:
public class MeasurementObject : MonoBehaviour
{public Transform surface; // 表面位置(如物体顶部)
}
你可以把这个组件挂在测量物体上,并设置一个 Transform 来代表“接触面”的位置。
⚙️ 七、完整代码清单(含注释)
以下是完整 C# 脚本,已加入详细注释,方便理解和复用。
文件名:HeightGaugeController.cs
using UnityEngine;
public enum MeasurementAxis
{X,Y,Z
}public class HeightGaugeController : MonoBehaviour
{// 底部标尺的 Transformpublic Transform lowestLevel;// 顶部标尺的 Transformpublic Transform highestLevel;// 测量轴public MeasurementAxis measurementAxis = MeasurementAxis.Y;// 用于指定哪些层可以被击中public LayerMask collisionLayer;// 鼠标初始位置private Vector3 mouseInitialPos;// 鼠标当前目标位置private Vector3 mouseCurentPos;// 增量private Vector3 delta;// 爪子初始位置private Vector3 clawInitialPos;// 爪子目标位置private Vector3 clawTargetPos;private bool isDragging = false;public bool isClawColliding = false;private Vector3 colliderPosition; // 爪子碰撞器位置public float measureHeight; // 爪子高度void Update(){if (Input.GetMouseButtonDown(0)){if (RaycastGrabClaw()){isDragging = true;mouseInitialPos = ScenePointToLocalPoint();clawInitialPos = transform.localPosition;}}if (isDragging && Input.GetMouseButton(0)){mouseCurentPos = ScenePointToLocalPoint();delta = mouseCurentPos - mouseInitialPos;clawTargetPos = GetMeasurePos();transform.localPosition = clawTargetPos;measureHeight = (transform.localPosition - lowestLevel.localPosition).y;}if (Input.GetMouseButtonUp(0)){isDragging = false;ResetVariables();}}private void ResetVariables(){mouseCurentPos = Vector3.zero; // 重置目标位置mouseInitialPos = Vector3.zero; // 重置初始位置clawInitialPos = Vector3.zero; // 重置初始爪子位置clawTargetPos = Vector3.zero; // 重置当前目标位置delta = Vector3.zero; // 重置增量}/// <summary>/// 检测鼠标是否点击了爪子,并返回是否成功点击。/// </summary>/// <returns></returns>private bool RaycastGrabClaw(){// 检测鼠标是否点击了爪子Ray ray = Camera.main.ScreenPointToRay(Input.mousePosition);RaycastHit hit;if (Physics.Raycast(ray, out hit) && hit.transform == transform){return true;}return false;}/// <summary>/// 这里把屏幕坐标转换为世界坐标,使用target在相机空间中的 Z 轴深度。/// </summary>/// <param name="target"></param>Vector3 ScenePointToLocalPoint(){Vector3 currentScreenPos = Input.mousePosition;float depth = GetDepthInCameraSpace(); // 使用相同深度Vector3 worldPos = Camera.main.ScreenToWorldPoint(new Vector3(currentScreenPos.x, currentScreenPos.y, depth));return WordPointToLocalPoint(worldPos);}/// <summary>/// 获取物体在相机本地空间中的 Z 值(这才是 ScreenToWorldPoint 需要的深度)/// </summary>/// <param name="target"></param>/// <returns></returns>float GetDepthInCameraSpace(){return Vector3.Dot(transform.position - Camera.main.transform.position, Camera.main.transform.forward);}/// <summary>/// 把世界坐标转换为本地坐标/// </summary>/// <param name="worldPosition"></param>/// <returns></returns>private Vector3 WordPointToLocalPoint(Vector3 worldPosition){return transform.parent.InverseTransformPoint(worldPosition);}private Vector3 GetMeasurePos(){Vector3 newPosition = Vector3.zero;switch (measurementAxis){case MeasurementAxis.X:newPosition = clawInitialPos + new Vector3(delta.x, 0, 0);// 限制范围 newPosition.x = Mathf.Clamp(newPosition.x, lowestLevel.localPosition.x, highestLevel.localPosition.x);// 判断是否向下移动,并且碰撞了测量物体 if (newPosition.x <= clawTargetPos.x && isClawColliding){clawTargetPos = WordPointToLocalPoint(colliderPosition);// 如果是向下移动并且碰到物体,不允许继续下移 newPosition.x = clawTargetPos.x;}break;case MeasurementAxis.Y:newPosition = clawInitialPos + new Vector3(0, delta.y, 0);// 限制范围 newPosition.y = Mathf.Clamp(newPosition.y, lowestLevel.localPosition.y, highestLevel.localPosition.y);// 判断是否向下移动,并且碰撞了测量物体 if (newPosition.y <= clawTargetPos.y && isClawColliding){clawTargetPos = WordPointToLocalPoint(colliderPosition);// 如果是向下移动并且碰到物体,不允许继续下移 newPosition.y = clawTargetPos.y;}break;case MeasurementAxis.Z:newPosition = clawInitialPos + new Vector3(0, 0, delta.z);// 限制范围 newPosition.z = Mathf.Clamp(newPosition.z, lowestLevel.localPosition.z, highestLevel.localPosition.z);// 判断是否向下移动,并且碰撞了测量物体 if (newPosition.z <= clawTargetPos.z && isClawColliding){clawTargetPos = WordPointToLocalPoint(colliderPosition);// 如果是向下移动并且碰到物体,不允许继续下移 newPosition.z = clawTargetPos.z;}break;}return newPosition;}private void OnTriggerStay(Collider other){if (((1 << other.gameObject.layer) & collisionLayer.value) != 0){isClawColliding = true;MeasurementObject measurement = other.GetComponent<MeasurementObject>();colliderPosition = measurement.surface.position;}}private void OnTriggerExit(Collider other){if (((1 << other.gameObject.layer) & collisionLayer.value) != 0){isClawColliding = false;colliderPosition = Vector3.zero;}}
}
八、项目地址
以下是项目地址,有需要的小伙伴门可以自取:
https://download.csdn.net/download/caiprogram123/90943926
| 每一次跌倒都是一次成长 每一次努力都是一次进步 |
如果您喜欢本博客,请点赞和分享给更多的朋友,让更多人受益。同时,您也可以关注我的博客,以便及时获取最新的更新和文章。
在未来的写作中,我将继续努力,分享更多有趣、实用的内容。再次感谢大家的支持和鼓励,期待与您在下一篇博客再见!
相关文章:
Unity 模拟高度尺系统开发详解——实现拖动、范围限制、碰撞吸附与本地坐标轴选择
内容将会持续更新,有错误的地方欢迎指正,谢谢! Unity 模拟高度尺系统开发详解——实现拖动、范围限制、碰撞吸附与本地坐标轴选择 TechX 坚持将创新的科技带给世界! 拥有更好的学习体验 —— 不断努力,不断进步,不…...
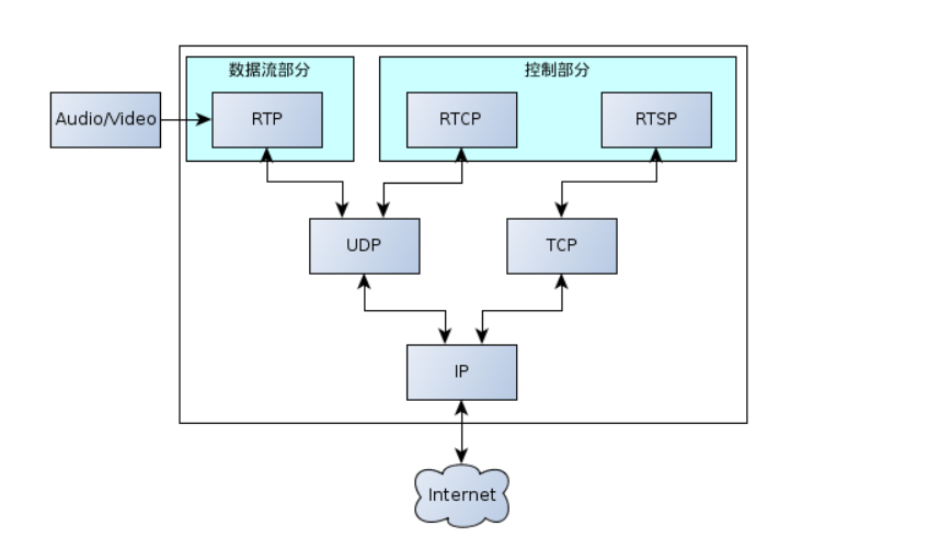
万字详解RTR RTSP SDP RTCP
目录 1 RTSP1.1 RTSP基本简介1.2 RSTP架构1.3 重点内容分析 2 RTR2.1 RTR简介2.2 RTP 封装 H.2642.3 RTP 解封装 H.2642.4 RTP封装 AAC2.5 RTP解封装AAC 3 SDP3.1 基础概念3.2 SDP协议示例解析3.3 重点知识 4 RTCP4.1 RTCP基础概念4.2 重点 5 总结 1 RTSP 1.1 RTSP基本简介 一…...

云服务器如何自动更新系统并保持安全?
云服务器自动更新系统是保障安全、修补漏洞的重要措施。下面是常见 Linux 系统(如 Ubuntu、Debian、CentOS)和 Windows 服务器自动更新的做法和建议: 1. Linux 云服务器自动更新及安全维护 Ubuntu / Debian 系统 手动更新命令 sudo apt up…...

训练中常见的运动强度分类
概述 有氧运动是耐力基础,乳酸阈值是耐力突破的关键,提升乳酸阈值可以延缓疲劳,无氧运动侧重速度和力量,混氧和最大摄氧量用于细化训练强度和评估潜力。 分类强度供能系统乳酸浓度训练目标有氧运动低(60%-80% HR&…...

java 递归地复制文件夹及其所有子文件夹和文件
java 递归地复制文件夹及其所有子文件夹和文件 根据你的需求,下面是一个 Java 代码示例,用于递归地复制文件夹及其所有子文件夹和文件。由于你提到文件夹是数据层面的,这里假设你可以通过 folderById 来获取文件夹的相关信息,并且…...
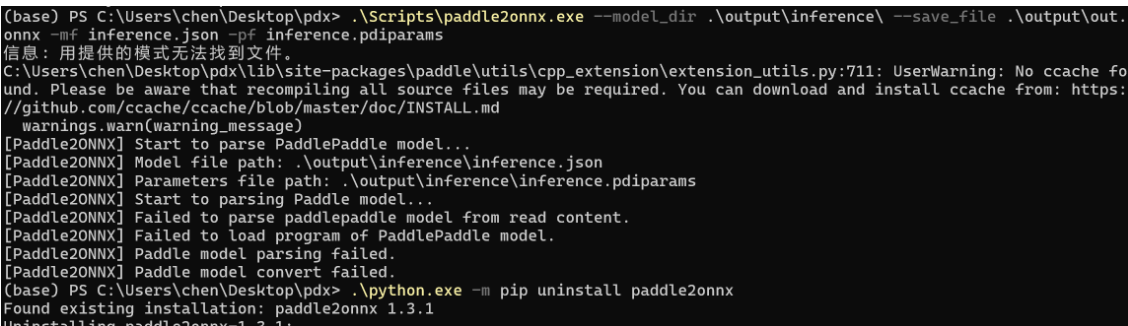
[paddle]paddle2onnx无法转换Paddle3.0.0的json格式paddle inference模型
使用PDX 3.0rc1 训练时序缺陷检测后导出的模型无法转换 Informations (please complete the following information): Inference engine for deployment: PD INFERENCE 3.0-->onnxruntime Why convert to onnx:在端侧设备上部署 Paddle2ONNX Version: 1.3.1 解…...

React项目在ios和安卓端要做一个渐变色背景,用css不支持,可使用react-native-linear-gradient
以上有个模块是灰色逐渐到白的背景色过渡 如果是css,以下代码就直接搞定 background: linear-gradient(180deg, #F6F6F6 0%, #FFF 100%);但是在RN中不支持这种写法,那应该写呢? 1.引入react-native-linear-gradient插件,我使用的是…...

【数据分析】特征工程-特征选择
【数据分析】特征工程-特征选择 (一)方差过滤法1.1 消除方差为0的特征1.2 保留一半的特征1.3 特征是二分类时 (二)相关性过滤法2.1 卡方过滤2.2 F检验2.3 互信息法 (三)其他3.1 包装法3.2 嵌入法3.3 衍生特…...

第4节 Node.js NPM 使用介绍
本文介绍了 Node.js 中 NPM 的使用,我们先来了解什么是 NPM。 NPM是随同NodeJS一起安装的包管理工具,能解决NodeJS代码部署上的很多问题,常见的使用场景有以下几种: 允许用户从NPM服务器下载别人编写的第三方包到本地使用。允许…...

RK3399 Android7.1增加应用安装白名单机制
通过设置应用包名白名单的方式限制未授权的应用软件安装。 diff --git a/frameworks/base/services/core/java/com/android/server/pm/PackageManagerService.java b/frameworks/base/services/core/java/com/android/server/pm/PackageManagerService.java index af9a533..ca…...
uni-app 安卓消失的字符去哪里了?maxLength失效了!
前情提要 皮一下~这个标题我还蛮喜欢的嘿嘿嘿【附上一个自行思考的猥琐的笑容】 前段时间不是在开发uni-app的一个小应用嘛,然后今天测试发现,有一个地方在苹果是没有问题的,但是在安卓上出现了问题,附上安卓的截图 在这里我是有限制maxLength=50的,而且,赋值字符串到字…...

#AI短视频制作完整教程
目录 前期准备AI工具选择制作流程后期优化发布策略 前期准备 1. 确定视频主题和风格 内容定位:教育、娱乐、商业推广、个人分享目标受众:年龄、兴趣、平台偏好视频时长:15-60秒(根据平台调整)风格调性:…...
嵌入式STM32学习——串口USART 2.0(printf重定义及串口发送)
printf重定义: C语言里面的printf函数默认输出设备是显示器,如果要实现printf函数输出正在串口或者LCD显示屏上,必须要重定义标准库函数里调用的与输出设备相关的函数,比如printf输出到串口,需要将fputc里面的输出指向…...

【大模型】情绪对话模型项目研发
一、使用框架: Qwen大模型后端Open-webui前端实现使用LLamaFactory的STF微调数据集,vllm后端部署, 二、框架安装 下载千问大模型 安装魔塔社区库文件 pip install modelscope Download.py 内容 from modelscope import snapshot_downlo…...
)
Git 教程 | 如何将指定文件夹回滚到上一次或某次提交状态(命令详解)
在日常开发中,我们经常会遇到这样的情况: “我想把某个文件夹恢复到之前的状态,但又不想影响整个项目,怎么办?” 别担心!这篇文章就教你如何用 Git 把项目中某个特定文件夹(或文件)回…...
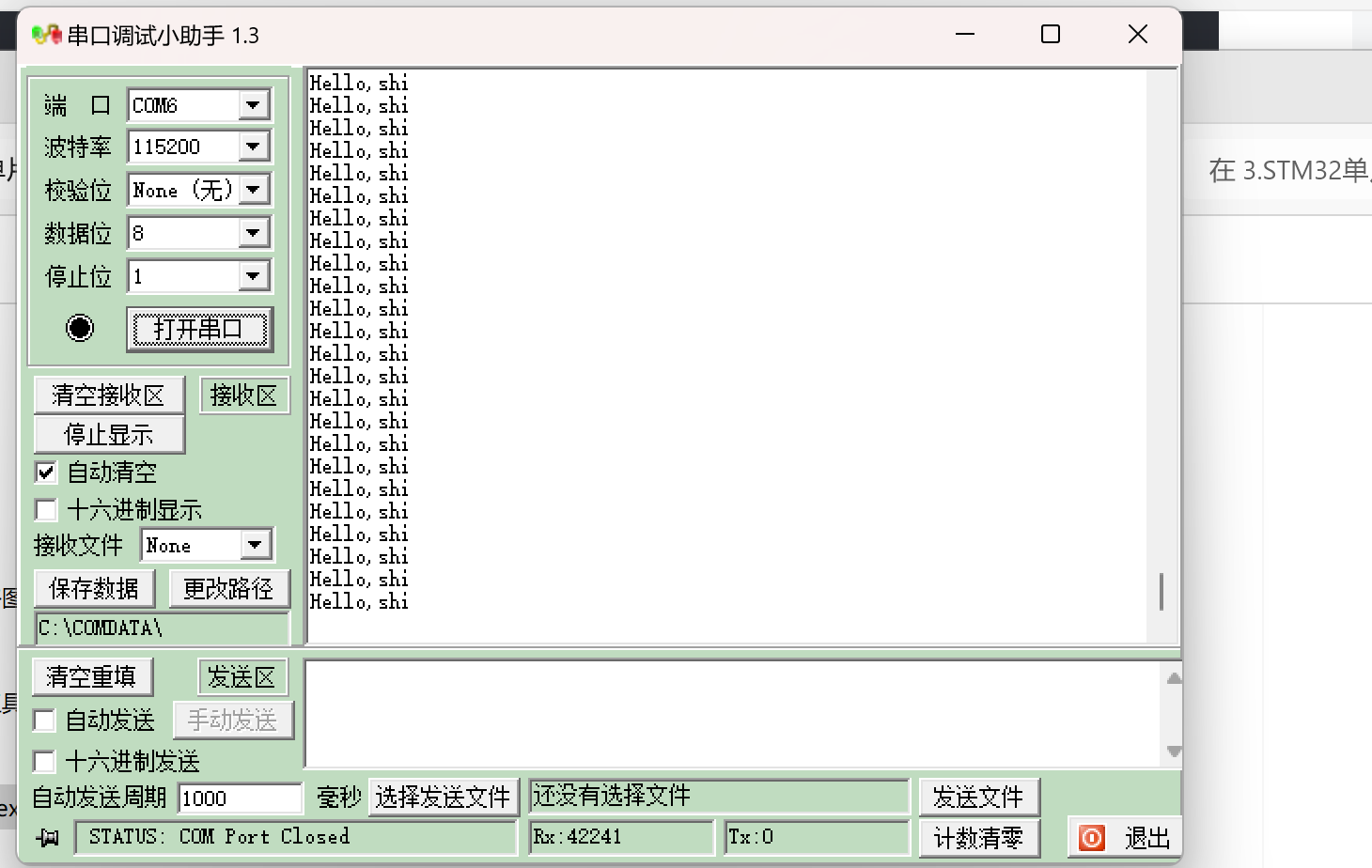
【PCI】PCI入门介绍(包含部分PCIe讲解)
先解释一下寻址空间: 机器是32bit的话,意味着4G(2的32次方)寻址空间,内存条作为它的实际物理存储设备。大部分在跑内存程序运行,少部分用来存放其他东西。这是一个常见的4G寻址空间分布(不一定是…...

Cloudera Manager 学习笔记
目录 1 基础概念与原理1.1 Cloudera Manager的主要作用是什么?1.2 与Ambari有何区别?1.3 Cloudera Manager 的核心功能和架构是什么?1.4 解释一下 Cloudera Manager 中的服务模型和角色?1.5 Cloudera Manager 是如何实现对 CDH 集群的集中管…...

Deepin 23.10安装Docker
个人博客地址:Deepin 23.10安装Docker | 一张假钞的真实世界 Deepin 是基于 Debian 的国产 Linux 发行版,安装 Docker Desktop 可能会遇到兼容性问题,因为 Docker Desktop 官方主要支持 Ubuntu/Debian/Red Hat/Fedora/Arch 等主流发行版&…...

使用PowerBI个人网关定时刷新数据
使用PowerBI个人网关定时刷新数据 PowerBI desktop连接mysql,可以设置定时刷新数据或在PowerBI服务中手动刷新数据,步骤如下: 第一步: 下载网关。以个人网关为例,如图 第二步: 双击网关,点击下一步&…...
数字人引领政务新风尚:智能设备助力政务服务
在信息技术飞速发展的今天,政府机构不断探索提升服务效率和改善服务质量的新途径。实时交互数字人在政务服务中的应用正成为一大亮点,通过将“数字公务员”植入各种横屏智能设备中,为民众办理业务提供全程辅助。这种创新不仅优化了政务大厅的…...
深入剖析Java类加载机制:双亲委派模型的突破与实战应用
引言:一个诡异的NoClassDefFoundError 某金融系统在迁移到微服务架构后,突然出现了一个诡异问题:在调用核心交易模块时,频繁抛出NoClassDefFoundError,但类明明存在于classpath中。经过排查,发现是由于不同…...

Kotlin JVM 注解详解
前言 Kotlin 作为一门现代 JVM 语言,提供了出色的 Java 互操作性。为了更好地支持与 Java 代码的交互,Kotlin 提供了一系列 JVM 相关注解。这些注解不仅能帮助我们控制 Kotlin 代码编译成 Java 字节码的行为,还能让我们的 Kotlin 代码更好地…...

将 node.js 项目作为后台进程持续运行
将 node.js 项目作为后台进程持续运行 方法 1:使用 pm2(生产环境推荐) 安装 pm2(Node.js 进程管理器):npm install pm2 -g启动应用:pm2 start hd/src/app.js --name "my-app"常用命…...
)
【PhysUnits】15.5 引入P1后的标准化表示(standardization.rs)
一、源码 这段代码实现了一个类型级别的二进制数标准化系统,主要用于处理二进制数的前导零和特殊值的简化。 use super::basic::{Z0, P1, N1, B0, B1, NonNegOne, NonZero};/// 处理 B0<H> 类型的标准化 /// Standardization for B0<H> types /// ///…...

MySQL-5.7 修改密码和连接访问权限
一、MySQL-5.7 修改密码和连接权限设置 修改密码语法 注意:rootlocalhost 和 root192.168.56.% 是两个不同的用户。在修改密码时,两个用户的密码是各自分别保存,如果两个用户密码设置不一样则登陆时注意登陆密码 GRANT ALL PRIVILEGES ON …...
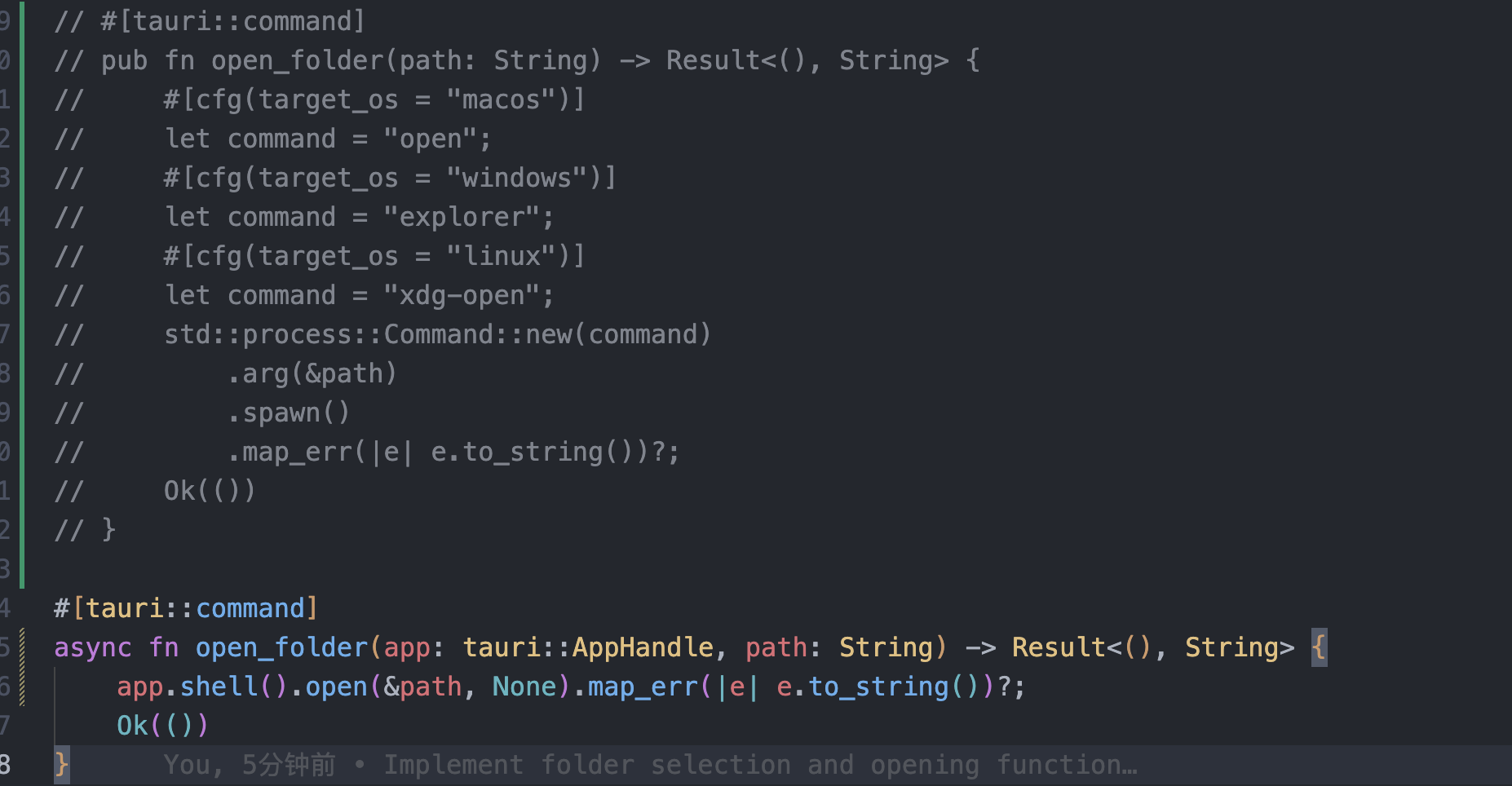
tauri2项目打开某个文件夹,类似于mac系统中的 open ./
在 Tauri 2 项目中打开文件夹 在 Tauri 2 项目中,你可以使用以下几种方法来打开文件夹,类似于 macOS 中的 open ./ 命令功能: 方法一:使用 shell 命令 use tauri::Manager;#[tauri::command] async fn open_folder(path: Strin…...

企业文件乱、传输慢?用群晖 NAS 构建安全高效的共享系统
在信息化办公不断加速的今天,企业对文件存储、共享与安全管理的需求愈发严苛。传统文件共享方式效率低下、权限混乱、远程访问困难,极大影响了协同办公效率。此时,一套可靠、高效、安全的文件共享解决方案便成为众多企业的“刚需”。 这正是…...

防爆手机VS普通手机,区别在哪里?
在加油站掏出手机接打电话、在化工厂车间随手拍照记录……这些看似寻常的行为,实则暗藏致命风险。普通手机在易燃易爆环境中可能成为“隐形炸弹”,而防爆手机却能安全护航。这两者看似相似,实则从底层基因到应用场景都存在着本质差异…...

C语言结构体的别名与创建结构体变量
这段代码是用C语言定义了一个链表节点的结构体,并通过typedef为相关类型创建了别名。下面分别解释Lnode和pNode: 1. Lnode Lnode是通过typedef为struct node定义的一个别名。struct node是一个结构体类型,表示一个链表节点。它的定义如下&a…...
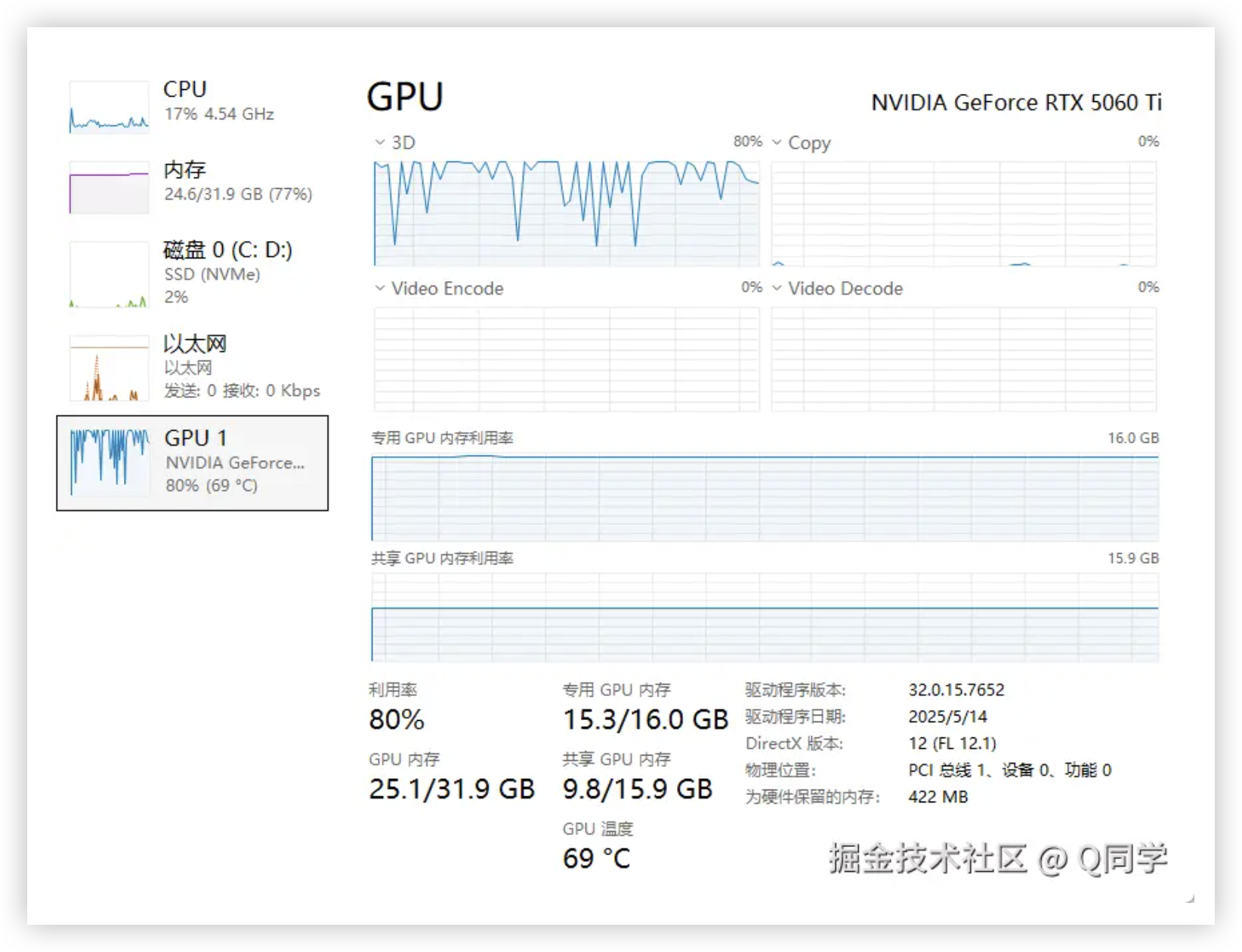
在RTX5060Ti上进行Qwen3-4B的GRPO强化微调
导语 最近赶上618活动,将家里的RTX 4060显卡升级为了RTX 5060Ti 16GB版本,显存翻了一番,可以进行一些LLM微调实验了,本篇博客记录使用unsloth框架在RTX 5060Ti 16GB显卡上进行Qwen3-4B-Base模型的GRPO强化微调实验。 简介 GPU性…...