LabVIEW杂草识别与精准喷洒
基于LabVIEW构建了一套集成机器视觉、智能决策与精准控制的农业杂草识别系统。通过高分辨率视觉传感器采集作物图像,利用 LabVIEW 的 NI Vision 模块实现图像颜色匹配与特征分析,结合 Arduino 兼容的工业级控制硬件,实现杂草定位与除草剂精准喷洒。
应用场景
-
适用环境:露天农田、智能温室、果园等规模化种植场景,支持单株作物精细化检测与行间杂草识别。
-
核心功能:实时图像采集→杂草颜色特征匹配→Arduino 驱动执行机构(喷雾器、移动平台)→精准除草作业。
硬件选型
| 硬件组件 | 品牌 / 型号 | 选型原因 |
| 工业相机 | Basler acA2000-50gm | 500 万像素全局快门,支持 USB3.0 高速传输,适应动态光照环境下的清晰成像。 |
| 镜头 | Computar M0814-MP2 | 8mm 定焦镜头,景深大,适合近距(30-100cm)植物叶片细节捕捉。 |
| 光源 | Ose 机器视觉环形光源 | 可调白光 LED 光源,消除阴影干扰,确保 RGB 颜色采集的一致性。 |
| 控制器 | Arduino Due | 32 位 ARM 核心,支持高速 IO 通信,兼容 LabVIEW Interface for Arduino(LIFA)插件。 |
| 执行机构 | Festo 气动喷雾阀 | 响应时间 < 20ms,雾化颗粒均匀,配合高精度滑台模组(THK KR20)实现 ±2mm 定位精度。 |
| 移动平台 | AGV 小车(MiR100) | 自主导航 AGV,支持 ROS 与 LabVIEW 通信,适应田间复杂路径规划。 |
优势组合:
-
Basler 相机 + Computar 镜头实现亚毫米级图像分辨率,满足叶片纹理与颜色的精准分析;
-
Festo 气动阀与 THK 滑台的高精度配合,确保除草剂喷洒范围误差 < 5cm;
-
MiR100 AGV 支持动态路径调整,提升多地块作业效率。
核心功能
-
图像预处理
-
使用 NI Vision Assistant 配置颜色采集参数,通过 RGB 阈值分割提取绿色像素(模板颜色匹配度 > 85%),替代传统二值化处理,保留更多颜色细节;
-
移除噪声滤波模块,避免误将病斑识别为健康区域,直接通过形态学开运算(膨胀 + 腐蚀)消除图像噪点。
-
杂草检测算法
-
-
颜色特征优先:以健康作物的 RGB 均值(如 R=50-80, G=150-200, B=30-60)构建模板,通过 NI IMAQ Match Pattern 函数实现像素级匹配,匹配分数 > 75% 判定为作物,<50% 判定为杂草;
-
形态学辅助验证:计算轮廓面积、长宽比(>2.5 判定为狭长草叶),排除土壤、枯叶等干扰。
-
硬件控制逻辑
-
-
通过 LIFA 库实现 LabVIEW 与 Arduino Due 的实时通信,传输数据包括:杂草坐标(X/Y)、喷雾触发信号、AGV 导航指令;
-
多线程设计:主线程处理图像分析,子线程同步控制 AGV 移动与喷雾阀,确保作业延迟 < 100ms。
-
(三)架构优势
| 对比维度 | 本方案(LabVIEW+Arduino) | 传统方案(Python + 树莓派) |
| 开发效率 | 图形化编程,50% 代码量减少,支持实时调试 | 需编写底层驱动,调试周期长 |
| 实时性 | 毫秒级图像处理(NI Vision 优化库) | 依赖 Python 解释器,延迟较高 |
| 硬件兼容性 | 内置 LIFA 库,即插即用 Arduino 生态硬件 | 需手动适配 GPIO,易出现通信延迟 |
| 工业级扩展 | 支持 NI CompactRIO 等实时控制器升级 | 限于树莓派性能,难以扩展复杂外设 |
| 算法部署 | 直接调用 NI 视觉函数,无需代码转换 | 需通过 C++ 重写算法,移植成本高 |
主要特点:
-
低代码高效开发:通过 LabVIEW 图形化界面快速搭建算法流程,非编程人员可通过 NI Vision Assistant 完成 90% 的参数配置;
-
硬实时性保障:利用 LabVIEW Real-Time 模块可升级至 FPGA 加速,满足无人机实时除草等对延迟敏感的场景;
-
生态整合能力:无缝对接 NI 数据采集卡、运动控制卡,支持从原型到工业量产的平滑过渡。
主要问题
(一)关键问题 1:光照变化导致颜色漂移
-
现象:不同时段光照(如正午强光 / 傍晚弱光)导致作物 RGB 值波动,误将健康叶片判定为杂草。
-
解决方案:
-
引入自动白平衡(AWB)算法:通过 NI IMAQ Set White Balance 函数,利用标准白板实时校准相机色彩;
-
动态阈值调整:建立光照强度 - 阈值补偿模型,根据环境光传感器数据(连接 Arduino)自动调整 RGB 匹配范围。
-
(二)关键问题 2:复杂背景下杂草分割困难
-
现象:作物与杂草叶片颜色相近(如玉米与狗尾草均为绿色),单纯颜色匹配误检率高。
-
解决方案:
-
融合纹理特征:新增灰度共生矩阵(GLCM)分析,提取对比度、熵值等纹理参数,通过 LabVIEW Statistics 与 Machine Learning 模块训练 SVM 分类器;
-
区域生长算法:以颜色匹配结果为种子点,基于像素相似度扩展 ROI,排除孤立噪声点。
-
(三)关键问题 3:多设备同步控制延迟
-
现象:AGV 移动与喷雾阀触发不同步,导致除草剂喷洒位置偏移。
-
解决方案:
-
采用时间触发机制:在 LabVIEW 中创建定时循环(10ms 周期),同步更新 AGV 位置数据与喷雾逻辑;
-
硬件握手信号:Arduino 通过硬件中断引脚(D2/D3)接收 LabVIEW 的触发信号,确保控制指令优先级高于常规串口通信。
-
LabVIEW 特色
-
视觉算法快速验证:通过 NI Vision Assistant 交互式调参,10 分钟内完成颜色模板创建与匹配策略优化,较 Python OpenCV 节省 50% 开发时间;
-
多域系统集成:同一平台实现图像处理(NI Vision)、逻辑控制(LabVIEW FPGA)、数据记录(TDMS 格式),避免跨软件协同的兼容性问题;
-
工业级部署能力:支持编译为独立可执行程序(EXE),运行于无 LabVIEW 环境的工业 PC,配合 NICompactRIO 实现无风扇嵌入式系统部署。
本方案通过 LabVIEW 的图形化开发优势与 NI 硬件生态整合能力,构建了一套高鲁棒性、易扩展的智能除草系统。相较于传统方案,其核心竞争力在于低代码开发效率、硬实时控制能力与工业级硬件兼容性,尤其适合农业自动化领域对快速原型开发与可靠部署的双重需求。
相关文章:
LabVIEW杂草识别与精准喷洒
基于LabVIEW构建了一套集成机器视觉、智能决策与精准控制的农业杂草识别系统。通过高分辨率视觉传感器采集作物图像,利用 LabVIEW 的 NI Vision 模块实现图像颜色匹配与特征分析,结合 Arduino 兼容的工业级控制硬件,实现杂草定位与除草剂精准…...

分布式不同数据的一致性模型
1. 强一致性(Strong Consistency) 定义:所有节点在任何时间点看到的数据完全一致,读操作总是返回最近的写操作结果。特点: 写操作完成后,所有后续读操作都能立即看到更新。通常需要同步机制(如…...

“application/json“,“text/plain“ 分别表示什么
这两个字符串:“application/json” 和 “text/plain” 是 MIME 类型(媒体类型),用于告诉接收方消息内容的格式,它们出现在 ContentType 字段中。 它告诉系统或程序:“这段数据是什么格式?” 格…...
)
SQL: 窗口滑动(Sliding Window)
目录 什么是“窗口”? 什么是“滑动”? 🔍 滑动窗口的核心: 🕒 什么是时间窗口?(Time Window) 时间窗口的基本结构 时间窗口的三种常见形式 📊 什么是行窗口&…...
学习日记-day20-6.1
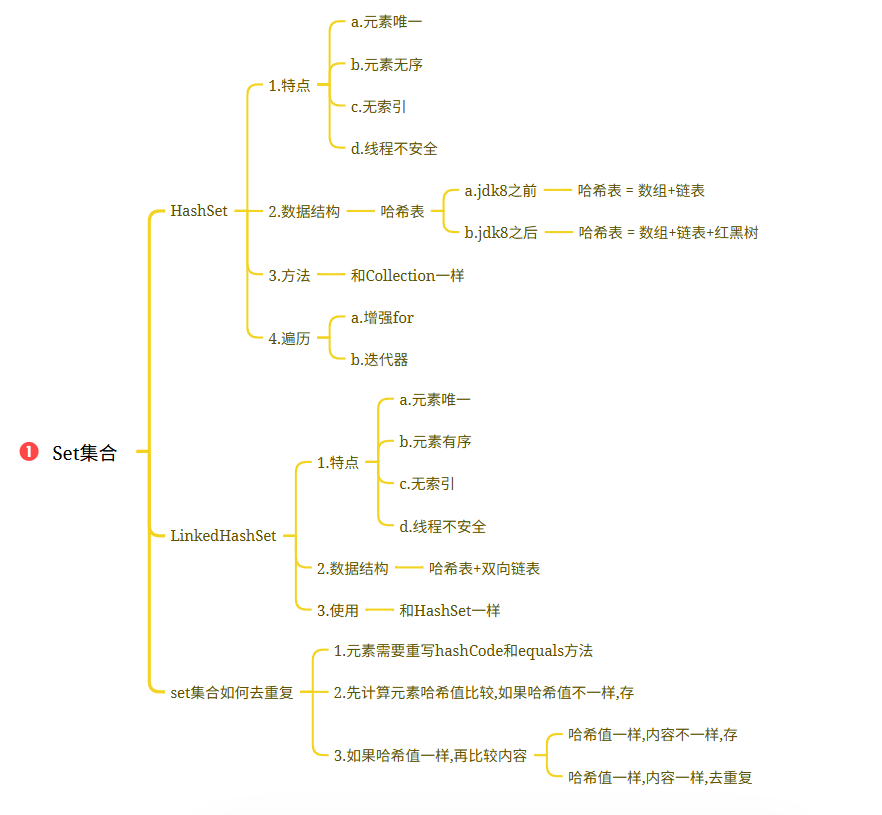
完成目标: 知识点: 1.集合_Collections集合工具类 方法:static <T> boolean addAll(Collection<? super T> c, T... elements)->批量添加元素 static void shuffle(List<?> list) ->将集合中的元素顺序打乱static <T>…...
【音视频】 FFmpeg 解码H265
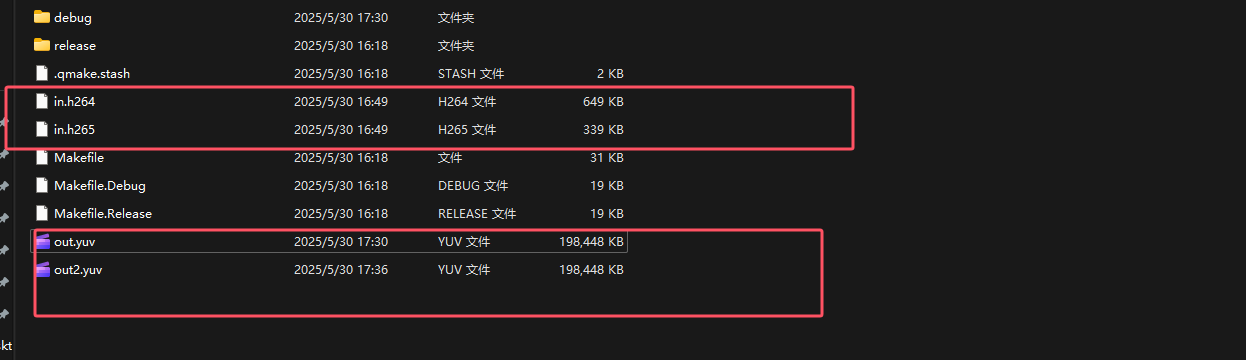
一、概述 实现了使用FFmpeg读取对应H265文件,并且保存为对应的yuv文件 二、实现流程 读取文件 将H265/H264文件放在build路径下,然后指定输出为yuv格式 在main函数中读取外部参数 if (argc < 2){fprintf(stderr, "Usage: %s <input file&…...

Linux 系统 Docker Compose 安装
个人博客地址:Linux 系统 Docker Compose 安装 | 一张假钞的真实世界 本文方法是直接下载 GitHub 项目的 release 版本。项目地址:GitHub - docker/compose: Define and run multi-container applications with Docker。 执行以下命令将发布程序加载至…...

软件测试|FIT故障注入测试工具——ISO 26262合规下的智能汽车安全验证引擎
FIT(Fault Injection Tester)是SURESOFT专为汽车电子与工业控制设计的自动化故障注入测试工具,基于ISO 26262等国际安全标准开发,旨在解决传统测试中效率低、成本高、安全隐患难以复现的问题,其核心功能包括…...
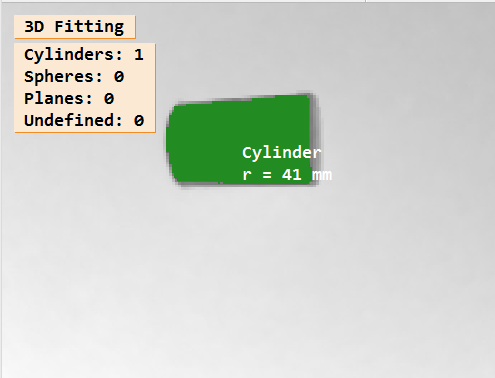
3D拟合测量水杯半径
1,目的。 测量水杯的半径 如图所示: 2,原理。 对 3D 点云对象 进行圆柱体拟合,获取拟合后的半径。 3,注意事项。 在Halcon中使用fit_primitives_object_model_3d进行圆柱体拟合时,输出的primitive_para…...
量子计算对密码学的影响)
(21)量子计算对密码学的影响
文章目录 2️⃣1️⃣ 量子计算对密码学的影响 🌌🔍 TL;DR🚀 量子计算:密码学的终结者?⚡ 量子计算的破坏力 🔐 Java密码学体系面临的量子威胁🔥 受影响最严重的Java安全组件 🛡️ 后…...
Python训练打卡Day38
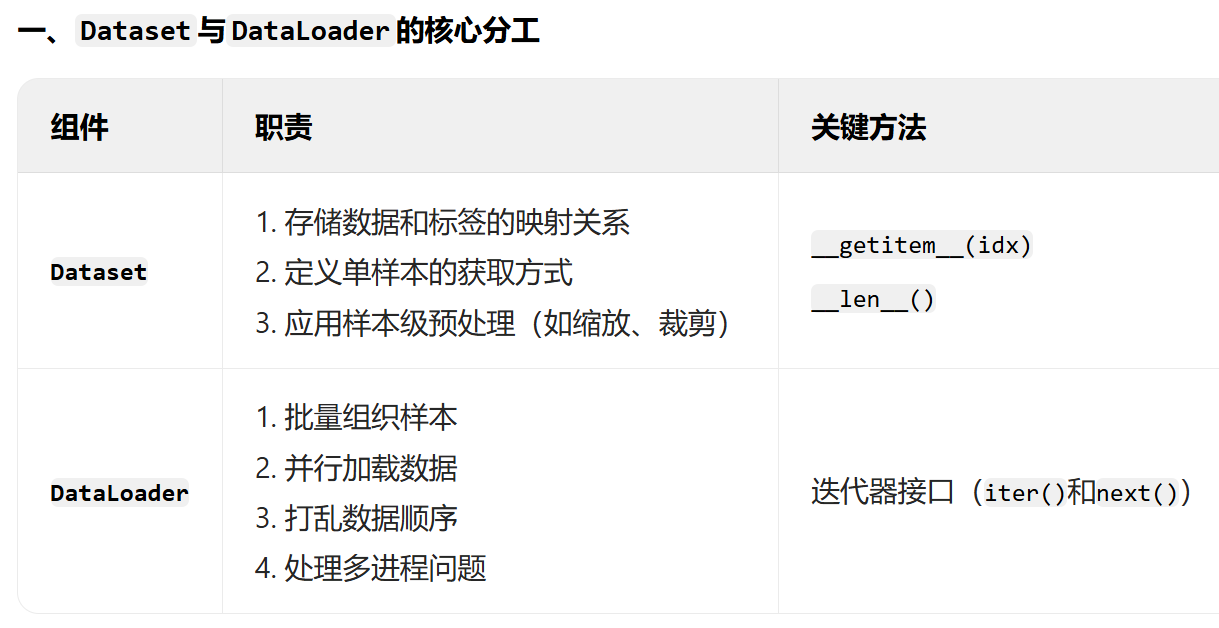
Dataset和Dataloader类 知识点回顾: Dataset类的__getitem__和__len__方法(本质是python的特殊方法)Dataloader类minist手写数据集的了解 在遇到大规模数据集时,显存常常无法一次性存储所有数据,所以需要使用分批训练的…...
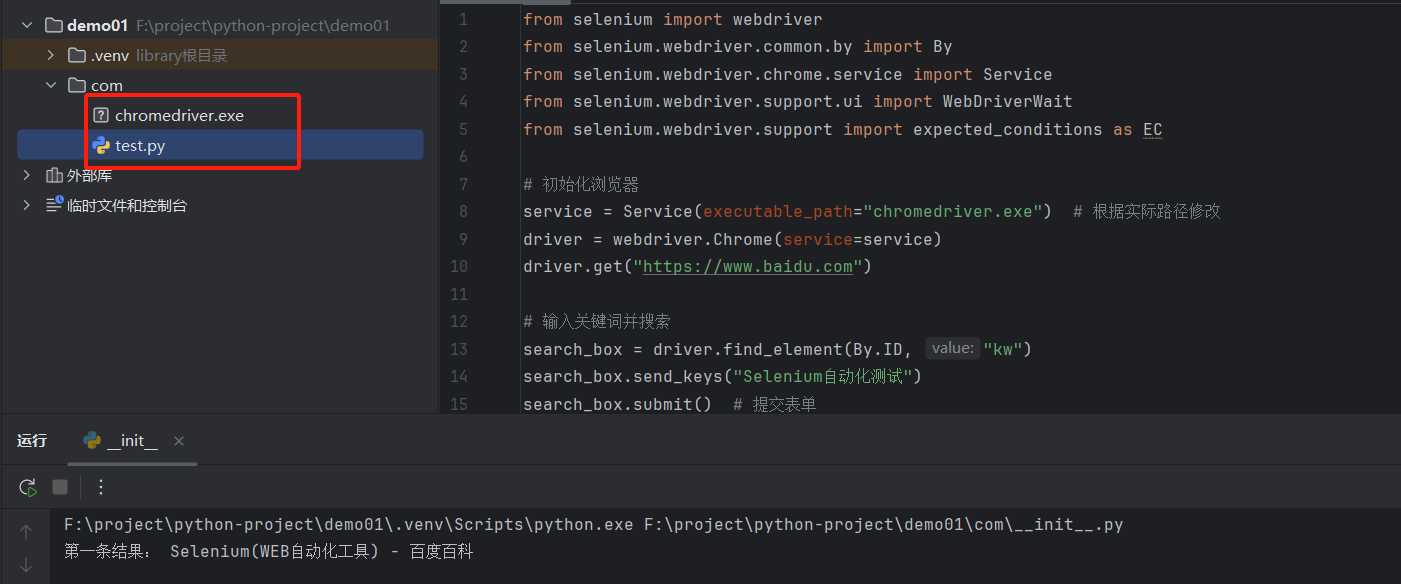
Selenium基础操作方法详解
Selenium基础操作方法详解:从零开始编写自动化脚本(附完整代码) 引言 Selenium是自动化测试和网页操作的利器,但对于新手来说,掌握基础操作是成功的第一步。本文将手把手教你使用Selenium完成浏览器初始化、元素定位、…...

Kali Linux从入门到实战:系统详解与工具指南
一、Kali Linux简介 Kali Linux是一款基于Debian的Linux发行版,专为渗透测试和网络安全审计设计,由Offensive Security团队维护。其前身是BackTrack,目前集成了超过600款安全工具,覆盖渗透测试全流程,是网络安全领域…...

【大模型】Bert变种
1. RoBERTa(Robustly optimized BERT approach) 核心改动 取消 NSP(Next Sentence Prediction)任务,研究发现 NSP 对多数下游任务贡献有限。动态遮蔽(dynamic masking):每个 epoch …...
)
vue-09(使用自定义事件和作用域插槽构建可重用组件)
实践练习:使用自定义事件和作用域插槽构建可重用组件 构建可重用的组件是高效 Vue.js 开发的基石。本课重点介绍如何通过自定义事件和范围插槽来增强组件的可重用性,从而实现更灵活和动态的组件交互。我们将探索如何定义和发出自定义事件,使…...

简单三步FastAdmin 开源框架的安装
简单三步FastAdmin 开源框架的安装 第一步:新建站点1,在宝塔面板中,创建一个新的站点,并填写项目域名。 第二步:上传框架1,框架下载2,上传解压缩 第三步:配置并安装1,进入…...
RISC-V 开发板 MUSE Pi Pro 搭建 Spacengine AI模型部署环境
视频讲解: RISC-V 开发板 MUSE Pi Pro 搭建 Spacengine AI模型部署环境 Spacengine 是由 进迭时空 研发的一套 AI 算法模型部署工具,可以方便的帮助用户部署自己的模型在端侧, 环境部署的方式,官方提供了两种方式: do…...

C++面试5——对象存储区域详解
C++对象存储区域详解 核心观点:内存是程序员的战场,存储区域决定对象的生杀大权!栈对象自动赴死,堆对象生死由你,全局对象永生不死,常量区对象只读不灭。 一、四大地域生死簿 栈区(Stack) • 特点:自动分配释放,速度极快(类似高铁进出站) • 生存期:函数大括号{}就…...
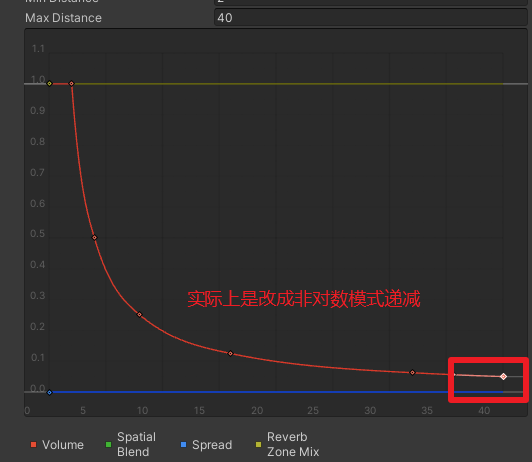
【Unity】AudioSource超过MaxDistance还是能听见
unity版本:2022.3.51f1c1 将SpatialBlend拉到1即可 或者这里改到0 Hearing audio outside max distance - #11 by wderstine - Questions & Answers - Unity Discussions...

基于 51 单片机的智能饮水机控制系统设计与实现
一、引言 随着物联网技术的发展,传统家电的智能化升级成为趋势。本文提出一种基于 51 单片机的智能饮水机设计方案,实现水温精准控制、水位监测、人机交互等功能,具有成本低、稳定性高的特点,适用于家庭和小型办公场景。 二、硬件设计 2.1 核心芯片选型 单片机:选用STC…...
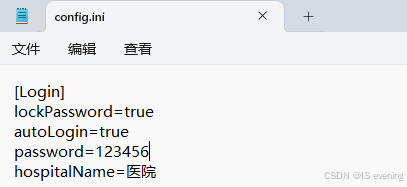
Qt 读取和写入 INI 格式的配置文件
Qt 读取和写入 INI 格式的配置文件 前言:INI 配置文件在 Qt 开发中的重要性基础夯实:INI 文件结构与 QSettings 核心概念1. INI 文件的基本结构2. QSettings 类概述3. 初始化 QSettings 对象4. 基本读写操作5. 高级操作技巧5.1 处理数组和列表5.2 检查键…...

互联网大厂Java求职面试:AI与云原生架构实战解析
互联网大厂Java求职面试:AI与云原生架构实战解析 面试背景设定 场景:某互联网头部企业技术总监办公室,窗外是城市夜景,室内灯光柔和。面试官是一位经验丰富的技术总监,面前摆着一杯黑咖啡和候选人的简历。 候选人&a…...
Spring:从青铜到王者,你的Java修炼手册
一、Spring家族宇宙:原来你是这样的框架(青铜段位) 1.1 Spring的"前世今生":从泡面到满汉全席 2002年的泡面哲学:Rod Johnson在厨房煮泡面时突然顿悟:"Java开发为什么不能像泡面一…...

React和原生事件的区别
一、核心差异对比表 维度原生事件React 事件绑定语法HTML 属性(onclick)或 DOM API(addEventListener)JSX 中使用驼峰式属性(onClick)绑定位置直接绑定到具体 DOM 元素统一委托到根节点(React …...
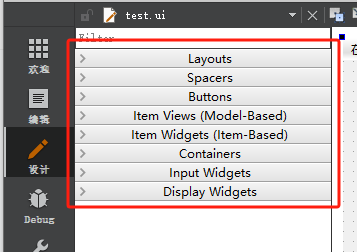
Qt creator 设计页面控件认识与了解
记录一下 Qt 中的认识与了解: 在 Qt 中,这些功能属于 Qt Designer 的组件过滤系统,旨在帮助开发者在对象浏览器中快速定位和使用不同类型的控件和组件。以下是每个功能的详细讲解: Layouts(布局)&…...

命象架构法 02|你的系统有“用神”吗?
命理中说:“八字无用神,是虚命。” 系统架构中说:“模块无主线,是垃圾桶。” 你设计了无数类,却不知道哪个是核心。 那么你的系统,很可能是没有“用神”的。 01|什么是“用神”?不是你以为的“最好” 命理中,“用神”不是“最强的”,而是对命主最有帮助的。 比如一…...

NVIDIA Mellanox BlueField-2 DPU(Data Processing Unit)智能网卡的调试和使用
专有名词 OOB: BMC: BFB: EMMC: 关键词解释eMMCEmbedded Multi-Media Card——把 NAND 闪存颗粒与控制器封装在一起的板载存储件,类似手机里的“内置储存” .deb:文件是Debian软件包格式的专…...

Tomcat- AJP协议文件读取/命令执行漏洞(幽灵猫复现)详细步骤
一、漏洞描述 Apache Tomcat是由Apache软件基金会属下Jakarta项目开发的Servlet容器.默认情况下,Apache Tomcat会开启AJP连接器,方便与其他Web服务器通过AJP协议进行交互.但Apache Tomcat在AJP协议的实现上存在漏洞,导致攻击者可以通过发送恶意的AJP请求,可以读取或者包含Web应…...

B1、进度汇报(— 25/05/31)
本文档汇总了各成员在 2025 年 5 月 11 日 ~ 5 月 31 日完成的工作。我们遇到了进度问题(收工后需反思): 本学期第十四周(05/19 ~ 05/25)有相当多课程需要提交实验结果或上台展示。本学期第十六周(06/02 ~…...

工作流引擎-11-开源 BPM 项目 jbpm
工作流引擎系列 工作流引擎-00-流程引擎概览 工作流引擎-01-Activiti 是领先的轻量级、以 Java 为中心的开源 BPMN 引擎,支持现实世界的流程自动化需求 工作流引擎-02-BPM OA ERP 区别和联系 工作流引擎-03-聊一聊流程引擎 工作流引擎-04-流程引擎 activiti 优…...