2024-2025-2-《移动机器人设计与实践》-复习资料-8……
2024-2025-2-《移动机器人设计与实践》-复习资料-1-7-CSDN博客
08 移动机器人基础编程
单选题(6题)
- 在ROS中,用于移动机器人速度控制的消息类型通常是?
- A. std_msgs/String
- B. geometry_msgs/Twist
- C. sensor_msgs/Image
- D. nav_msgs/Odometry
- 以下哪个节点通常用于订阅速度指令并控制机器人移动?
- A. 激光雷达节点
- B. 摄像头节点
- C. 底盘驱动节点
- D. 导航节点
- 在ROS中,用于发布机器人位置信息的常用话题名称可能是?
- A. /cmd_vel
- B. /odom
- C. /scan
- D. /image_raw
- 移动机器人编程中,常用于处理传感器数据的库是?
- A. OpenCV
- B. NumPy
- C. sensor_msgs
- D. tf
- 在ROS中,要实现机器人避障功能,通常需要订阅哪种类型的消息?
- A. 激光雷达数据
- B. 摄像头图像
- C. 机器人速度
- D. 电池状态
- 以下哪个命令可以用于在ROS中发布速度指令到/cmd_vel话题?
- A. rostopic pub /cmd_vel geometry_msgs/Twist ...
- B. rosnode pub /cmd_vel geometry_msgs/Twist ...
- C. rosservice call /cmd_vel geometry_msgs/Twist ...
- D. rosmsg pub /cmd_vel geometry_msgs/Twist ...
多选题(6题)
- 移动机器人编程中,可能需要的传感器数据包括哪些?
- A. 激光雷达数据
- B. 摄像头图像
- C. IMU数据
- D. 超声波传感器数据
- 在ROS中,实现机器人自主导航通常需要哪些组件?
- A. 地图服务器
- B. 定位模块
- C. 路径规划模块
- D. 底盘驱动节点
- 以下哪些是ROS中处理机器人运动控制的常用消息类型?
- A. geometry_msgs/Twist
- B. nav_msgs/Path
- C. sensor_msgs/LaserScan
- D. std_msgs/Bool(注:这个不常用于运动控制,但为保持选项多样性列出)
- 移动机器人编程中,可能涉及的任务包括哪些?
- A. 传感器数据读取
- B. 运动控制
- C. 路径规划
- D. 用户界面设计
- 在ROS中,与机器人移动相关的常用工具或库包括哪些?
- A. move_base(导航栈)
- B. gmapping(SLAM算法)
- C. amcl(自适应蒙特卡洛定位)
- D. RViz(可视化工具,也用于导航配置)
- 以下哪些操作可以通过ROS中的话题通信实现?
- A. 发布机器人速度指令
- B. 订阅激光雷达数据
- C. 调用服务获取地图信息
- D. 发布机器人位置信息
判断题(6题)
- 在ROS中,/cmd_vel话题通常用于发布机器人的速度指令。
- 移动机器人编程中,只需要考虑机器人的运动控制,不需要处理传感器数据。
- 在ROS中,可以使用rostopic pub命令手动发布消息到任意话题。
- 移动机器人的避障功能只能通过激光雷达实现。
- 在ROS中,move_base节点是实现机器人自主导航的核心节点。
- ROS中的tf库主要用于处理机器人的坐标变换,与运动控制无关。
09 移动机器人运动学
单选题(6题)
- 在移动机器人运动学中,描述机器人位置和方向的常用方法是?
- A. 笛卡尔坐标
- B. 极坐标
- C. 齐次坐标变换矩阵
- D. 欧拉角
- 差分驱动机器人(如两轮驱动)的运动学模型主要基于什么原理?
- A. 牛顿第二定律
- B. 速度叠加原理
- C. 角动量守恒
- D. 能量守恒
- 在ROS中,tf库主要用于处理什么?
- A. 传感器数据融合
- B. 机器人运动控制
- C. 坐标变换
- D. 路径规划
- 以下哪种方法不是解决移动机器人运动学逆问题的常用方法?
- A. 几何法
- B. 代数法
- C. 数值迭代法
- D. 蒙特卡洛法
- 移动机器人的正运动学问题是指?
- A. 已知机器人关节变量,求末端执行器位置
- B. 已知末端执行器位置,求机器人关节变量
- C. 机器人路径规划
- D. 机器人动力学分析
- 在ROS中,用于描述机器人连杆和关节关系的文件类型是?
- A. URDF
- B. Launch
- C. Msg
- D. Srv
多选题(6题)
- 移动机器人运动学涉及的内容包括哪些?
- A. 位置描述
- B. 速度分析
- C. 加速度分析
- D. 动力学建模
- 以下哪些是描述机器人运动学的常用工具或方法?
- A. 齐次坐标变换矩阵
- B. D-H参数法
- C. 欧拉角
- D. 四元数
- 在ROS中,tf库可以处理哪些类型的坐标变换?
- A. 静态变换
- B. 动态变换
- C. 相对变换
- D. 绝对变换
- 移动机器人的运动学模型可以用于哪些应用?
- A. 路径规划
- B. 运动控制
- C. 传感器数据校准
- D. 导航定位
- 以下哪些因素会影响移动机器人的运动学性能?
- A. 轮子的尺寸和类型
- B. 机器人的质量分布
- C. 驱动电机的性能
- D. 环境条件(如地面摩擦力)
- 在ROS中,与机器人运动学相关的常用包或工具包括哪些?
- A. tf
- B. robot_localization
- C. moveit!
- D. navigation
判断题(6题)
- 移动机器人的运动学只关注机器人的位置,不关注其速度或加速度。
- 在ROS中,tf库可以处理机器人不同坐标系之间的变换关系。
- 移动机器人的正运动学问题和逆运动学问题是相互独立的,没有联系。
- 差分驱动机器人的运动学模型可以精确描述其在任何环境下的运动。
- 在ROS中,URDF文件只能描述机器人的静态结构,不能描述其运动学特性。
- 移动机器人的运动学分析只需要考虑机器人的几何结构,不需要考虑其物理特性。
10 移动机器人动力学
单选题(6题)
-
移动机器人的动力学研究主要关注
A. 机器人的运动轨迹规划
B. 机器人的结构与运动之间的关系
C. 机器人的传感器数据处理
D. 机器人的导航算法 -
在移动机器人动力学中,以下哪个因素不影响机器人的运动性能
A. 机器人的质量分布
B. 机器人的驱动电机类型
C. 机器人的外观颜色
D. 机器人的轮子类型 -
移动机器人动力学建模时,通常不考虑
A. 机器人的惯性力
B. 机器人的摩擦力
C. 机器人的重力
D. 机器人的颜色对空气阻力的影响 -
以下哪种控制方法常用于移动机器人的动力学控制
A. PID控制
B. 遗传算法
C. 神经网络
D. 蒙特卡洛模拟 -
移动机器人动力学中的“非完整约束”指的是
A. 机器人不能在某些方向上移动
B. 机器人的所有运动都受到限制
C. 机器人的运动完全自由
D. 机器人的运动只受重力影响 -
在移动机器人动力学分析中,以下哪个参数不是必须考虑的
A. 机器人的质量
B. 机器人的轮子半径
C. 机器人的电池电量
D. 机器人的轮子数量
多选题(6题)
-
移动机器人动力学研究的内容包括
A. 机器人的运动与控制之间的关系
B. 机器人的结构与运动之间的关系
C. 机器人的传感器与控制之间的关系
D. 机器人的外观设计与运动之间的关系 -
影响移动机器人动力学性能的因素有
A. 机器人的质量分布
B. 机器人的驱动电机类型
C. 机器人的轮子类型
D. 机器人的颜色 -
在移动机器人动力学建模时,需要考虑的力包括
A. 惯性力
B. 摩擦力
C. 重力
D. 空气阻力(在特定环境下) -
移动机器人动力学控制中常用的方法包括
A. PID控制
B. 模型预测控制
C. 滑模控制
D. 遗传算法(在某些特定情况下) -
非完整约束对移动机器人的影响体现在
A. 限制机器人的某些运动方向
B. 增加机器人的控制难度
C. 使机器人的运动规划更加复杂
D. 提高机器人的运动效率 -
在移动机器人动力学分析中,需要考虑的机器人参数包括
A. 质量
B. 轮子半径
C. 轮子数量
D. 电池电量(间接影响)
判断题(6题)
-
移动机器人的动力学研究只关注机器人的运动轨迹规划。
-
机器人的质量分布对其动力学性能没有影响。
-
在移动机器人动力学建模时,摩擦力是一个必须考虑的因素。
-
非完整约束使移动机器人的控制变得更加简单。
-
PID控制是移动机器人动力学控制中常用的一种方法。
-
移动机器人的轮子类型对其动力学性能没有影响。
11 移动机器人机器视觉处理
……
以课本涉及内容为主,自主研究。
12 移动机器人SLAM建图
……
以课本涉及内容为主,自主研究。
13 移动机器人自主导航
……
以课本涉及内容为主,自主研究。
14 移动机器人语言交互
……
以课本涉及内容为主,自主研究。
15 移动机器人自动驾驶中的路径规划
单选题(6题)
- 在ROS中,常用于自动驾驶路径规划的算法包是?
- A. move_base
- B. nav_msgs
- C. teb_local_planner
- D. gmapping
- 自动驾驶路径规划中,全局路径规划的主要目标是?
- A. 避开即时障碍物
- B. 生成从起点到终点的最优路径
- C. 控制车辆速度
- D. 处理传感器数据
- 以下哪种方法不是自动驾驶路径规划中常用的环境建模方法?
- A. 栅格地图
- B. 矢量地图
- C. 拓扑地图
- D. 深度图像
- 在自动驾驶路径规划中,A*算法的主要特点是?
- A. 实时性高
- B. 能够处理动态障碍物
- C. 基于启发式搜索,寻找最优路径
- D. 适用于局部路径规划
- 自动驾驶车辆在进行路径规划时,通常需要考虑哪些因素?
- A. 车辆动力学约束
- B. 环境障碍物
- C. 交通规则
- D. 以上都是
- 在ROS中,用于可视化自动驾驶路径规划结果的常用工具是?
- A. RViz
- B. Gazebo
- C. rqt
- D. map_server
多选题(6题)
- 自动驾驶路径规划中可能涉及的关键技术包括哪些?
- A. 环境感知
- B. 路径规划算法
- C. 运动控制
- D. 地图构建与更新
- 以下哪些是自动驾驶路径规划中常用的全局路径规划算法?
- A. Dijkstra算法
- B. A*算法
- C. RRT(快速随机树)
- D. DWA(动态窗口法,注:更常用于局部路径规划)
- 自动驾驶车辆在路径规划时,可能面临的挑战包括哪些?
- A. 环境动态变化
- B. 传感器噪声
- C. 计算资源限制
- D. 复杂的交通规则
- 在ROS中,与自动驾驶路径规划相关的常用包或工具可能包括哪些?
- A. navigation
- B. teb_local_planner
- C. costmap_2d
- D. amcl
- 自动驾驶路径规划中,环境建模的方法可能包括哪些?
- A. 栅格地图
- B. 矢量地图
- C. 点云地图
- D. 语义地图
- 以下哪些方法可以提高自动驾驶路径规划的性能?
- A. 使用更先进的路径规划算法
- B. 增加传感器数据融合
- C. 优化计算资源分配
- D. 改进环境建模方法
判断题(6题)
- 自动驾驶路径规划只需要考虑全局路径,不需要考虑局部路径。
- 在自动驾驶路径规划中,A*算法总是能找到最优路径。
- 自动驾驶车辆在进行路径规划时,不需要考虑车辆的动力学约束。
- 在ROS中,move_base节点只能用于室内自动驾驶路径规划。
- 自动驾驶路径规划中,环境感知是路径规划的前提。
- 自动驾驶路径规划的结果可以直接用于车辆的运动控制,无需进一步处理。
16 移动机器人自动驾驶中的视觉感知
……
17 移动机器人自动驾驶综合应用场景
……
创新题案例
在ROS中,若定义一种"量子节点",其消息传递遵循量子纠缠原理,即两个节点状态瞬时关联。假设存在三个量子节点A、B、C,A与B纠缠,B与C纠缠。当A发布消息时,以下哪项正确?
A. 仅B收到消息
B. B和C同时收到消息
C. 仅C收到消息
D. 无法确定,因ROS未定义量子行为
在机器人路径规划中,若空间存在"拓扑虫洞",即两点间存在非欧几里得捷径。已知传统A算法在欧氏空间最优,在含虫洞空间中:
A. A仍最优
B. A可能陷入局部最优
C. 需改用RRT算法
D. 必须预先知道虫洞位置
若将ROS话题通信类比为"时间晶体",即消息传递具有时间周期性自组织特性。当两个节点以频率f1和f2发布消息,且f1/f2为无理数时:
A. 消息同步窗口无限增大
B. 系统进入混沌状态
C. 消息队列稳定
D. 消息丢失率趋近100%
若各智能体遵循"黑暗森林"法则(未知即威胁),其探索策略会:
A. 优先合作
B. 随机探索
C. 过度防御
D. 陷入纳什均衡
在机器人导航中,若障碍物存在"叠加态"(既存在又不存在),路径规划算法需如何处理?
A. 忽略障碍物
B. 计算所有可能路径的叠加
C. 引入概率模型
D. 无法规划,因违反经典物理
若状态空间维度为D,使用Q-learning时,以下哪项最可能成立?
A. D越大,算法收敛速度越快
B. D越大,探索效率越高
C. D越大,策略崩溃概率指数增长
D. D与算法性能无关
在ROS(机器人操作系统)中设计支持量子傅里叶变换(QFT)的“量子节点”以实现消息传递,需要结合量子计算特性与ROS分布式架构。以下为设计内容和思路的详细说明:
1. 核心设计目标
- 功能整合:将QFT作为量子节点的核心计算模块,用于处理经典节点无法高效解决的周期性信号分析问题(如传感器数据频域转换)。
- 消息接口:通过ROS话题(Topic)或服务(Service)实现量子节点与经典节点的数据交互,经典节点发送原始信号,量子节点返回频域分析结果。
- 容错与优化:针对量子计算中的退相干和噪声问题,采用变分量子算法或表面码纠错技术提升QFT可靠性。
2. 节点架构设计
2.1 节点类型划分
- 经典节点:负责数据采集、预处理及结果可视化(如ROS中的
sensor_msgs话题发布者)。 - 量子节点:运行QFT算法,接收经典节点发送的叠加态数据,返回频域概率分布。
2.2 通信协议设计
- 输入话题:经典节点通过
/quantum_input话题发送待分析信号(需编码为量子态)。 - 输出服务:量子节点提供
/qft_service服务,返回频域分析结果(如主频率及其概率)。 - 混合通信:采用ROS-Quantum Bridge工具包,实现经典数据与量子态的转换(如通过Qiskit-Runtime接口)。
3. QFT算法实现
3.1 算法流程
- 量子态初始化:将经典信号编码为量子叠加态(如通过Qiskit的
initialize函数)。 - QFT电路构建:
- 对N量子比特系统,依次应用Hadamard门和受控相位旋转门(旋转角度为π/2k)。
- 示例(3量子比特QFT):
from qiskit import QuantumCircuit qc = QuantumCircuit(3) qc.h(2) qc.cp(np.pi/2, 1, 2) qc.cp(np.pi/4, 0, 2) qc.h(1) qc.cp(np.pi/2, 0, 1) qc.h(0)pythonfrom qiskit import QuantumCircuitqc = QuantumCircuit(3)qc.h(2)qc.cp(np.pi/2, 1, 2)qc.cp(np.pi/4, 0, 2)qc.h(1)qc.cp(np.pi/2, 0, 1)qc.h(0)
- 测量与后处理:对量子态进行测量,通过概率分布提取频域信息。
3.2 优化策略
- 门操作分解:将受控相位门分解为CNOT和单量子比特门,减少硬件依赖。
- 变分QFT:针对含噪量子设备,采用参数化量子电路(PQC)结合经典优化器(如COBYLA)补偿误差。
4. 实验验证与案例
4.1 测试场景
- 信号分析:经典节点发送周期性信号(如正弦波),量子节点通过QFT提取主频率。
- 噪声模拟:在IBM Quantum模拟器中注入退相干噪声,验证变分QFT的鲁棒性。
4.2 性能对比
- 经典FFT:对1024点信号,经典FFT耗时约1ms(CPU)。
- 量子QFT:理想条件下,8量子比特QFT耗时约10μs(量子模拟器),但需考虑量子比特相干时间(约100μs)。
5. 挑战与未来方向
- 量子硬件限制:当前量子比特数不足,需通过量子纠错码或混合量子-经典算法扩展规模。
- 实时性优化:结合ROS的实时内核(如PREEMPT_RT),降低节点通信延迟。
- 跨平台兼容:开发ROS-Quantum Bridge的标准化接口,支持不同量子计算后端(如超导、离子阱)。
6. 代码示例(伪代码)
# ROS量子节点主程序
import rospy
from quantum_msgs.srv import QFTService, QFTServiceResponse
from qiskit import QuantumCircuit, execute, Aerdef handle_qft(req):# 1. 初始化量子电路qc = QuantumCircuit(req.n_qubits)# 2. 构建QFT电路(简化版)for i in range(req.n_qubits):qc.h(i)for j in range(i+1, req.n_qubits):qc.cp(np.pi/2**(j-i), j, i)# 3. 模拟执行并返回结果simulator = Aer.get_backend('statevector_simulator')result = execute(qc, simulator).result()statevec = result.get_statevector()freqs = extract_frequencies(statevec) # 自定义频域提取函数return QFTServiceResponse(frequencies=freqs)def quantum_node():rospy.init_node('quantum_qft_node')s = rospy.Service('/qft_service', QFTService, handle_qft)rospy.spin()if __name__ == '__main__':quantum_node()python
# ROS量子节点主程序 | |
import rospy | |
from quantum_msgs.srv import QFTService, QFTServiceResponse | |
from qiskit import QuantumCircuit, execute, Aer | |
def handle_qft(req): | |
# 1. 初始化量子电路 | |
qc = QuantumCircuit(req.n_qubits) | |
# 2. 构建QFT电路(简化版) | |
for i in range(req.n_qubits): | |
qc.h(i) | |
for j in range(i+1, req.n_qubits): | |
qc.cp(np.pi/2**(j-i), j, i) | |
# 3. 模拟执行并返回结果 | |
simulator = Aer.get_backend('statevector_simulator') | |
result = execute(qc, simulator).result() | |
statevec = result.get_statevector() | |
freqs = extract_frequencies(statevec) # 自定义频域提取函数 | |
return QFTServiceResponse(frequencies=freqs) | |
def quantum_node(): | |
rospy.init_node('quantum_qft_node') | |
s = rospy.Service('/qft_service', QFTService, handle_qft) | |
rospy.spin() | |
if __name__ == '__main__': | |
quantum_node() |
结论
通过将QFT嵌入ROS量子节点,可实现经典-量子混合计算架构,适用于高频信号分析、机器人感知优化等场景。未来需结合拓扑量子计算、光子量子芯片等技术突破硬件限制,推动量子计算在ROS中的实用化。
在ROS"量子节点"中,若消息传递需量子傅里叶变换(QFT),以下哪项是正确设计?
A. 消息传递速度与节点数量无关
B. 消息传递速度随节点数量指数增长
C. 消息传递速度随节点数量线性增长
D. 消息传递速度与节点数量相关,但需经典计算辅助
其实无完全准确的选项,只能选择更合适的。
在ROS(机器人操作系统)的“量子节点”中,若消息传递需要量子傅里叶变换(QFT),我们需要综合考虑量子计算和分布式系统的特性来分析选项的正确性。以下是逐项分析:
选项分析
A. 消息传递速度与节点数量无关
- 正确性:部分正确,但不完整。
- 量子计算视角:QFT的核心计算(如量子态的相位旋转和Hadamard门操作)是并行执行的,理论上其计算复杂度(如对N量子比特系统的QFT为O(n2)门操作)与节点数量无关(假设量子硬件资源充足)。
- 分布式系统视角:在ROS中,消息传递速度可能受经典网络通信延迟(如话题订阅/发布、服务调用)影响。若多个经典节点需与量子节点交互(例如并行调用服务),经典通信的延迟可能随节点数量线性增长(如路由开销、带宽竞争)。
- 结论:QFT本身与节点数量无关,但整体消息传递可能因经典通信部分而受影响,因此该选项未完全覆盖实际情况。
B. 消息传递速度随节点数量指数增长
- 正确性:错误。
- 量子计算特性:QFT的量子电路复杂度为多项式级(如O(n2)),而非指数级。
- 分布式系统特性:经典ROS通信的延迟通常为线性或对数级(取决于网络拓扑),而非指数级。
- 结论:该选项与量子计算和分布式系统的理论均矛盾。
C. 消息传递速度随节点数量线性增长
- 正确性:部分合理,但需条件。
- 经典通信部分:在ROS中,若多个经典节点需并行与量子节点交互(例如同时调用服务),则总延迟可能随节点数量线性增长(如带宽瓶颈或排队延迟)。
- 量子计算部分:QFT的核心计算仍与节点数量无关。
- 结论:该选项仅描述了经典通信部分的延迟趋势,未区分量子和经典部分,因此不够全面。
D. 消息传递速度与节点数量相关,但需经典计算辅助
- 正确性:最准确。
- 量子计算部分:QFT的计算速度由量子硬件决定,与节点数量无关(假设量子资源充足)。
- 经典计算辅助:
- 数据编码:经典节点需将数据编码为量子态(如通过Qiskit的
initialize函数),这一过程需经典计算。 - 结果后处理:量子测量后的概率分布需经典算法提取频域信息。
- 通信协调:ROS中的话题订阅/发布、服务调用需经典网络支持。
- 数据编码:经典节点需将数据编码为量子态(如通过Qiskit的
- 节点数量相关性:
- 经典通信延迟(如服务调用、话题发布)可能随节点数量线性增长(例如多节点并行访问量子节点时)。
- 即使QFT本身与节点数量无关,整体消息传递速度仍可能受经典通信部分影响。
- 结论:该选项准确区分了量子计算(与节点数量无关)和经典计算(辅助且可能受节点数量影响)的角色,是最全面的描述。
关键点总结
- QFT的核心计算:由量子硬件完成,与节点数量无关(假设量子资源充足)。
- 经典通信与辅助计算:
- 数据编码、结果后处理和网络通信需经典计算支持。
- 经典通信延迟可能随节点数量线性增长(例如多节点并行调用量子服务时)。
- 选项D的合理性:
- 强调了量子计算的独立性,同时承认经典计算的辅助作用。
- 明确指出消息传递速度与节点数量相关(因经典通信部分),但未否定QFT本身的并行性。
最终答案
D. 消息传递速度与节点数量相关,但需经典计算辅助
该选项正确描述了ROS“量子节点”中QFT消息传递的实际情况:
- QFT的计算速度与节点数量无关(量子部分)。
- 消息传递速度受经典通信延迟影响(可能随节点数量线性增长)。
- 经典计算在数据编码、结果后处理和通信协调中起辅助作用。

《移动机器人设计与实践》复习资料涵盖了ROS基础编程、运动学/动力学、机器视觉、SLAM建图、自主导航等核心内容。单选题、多选题和判断题考察了关键知识点,如速度控制消息类型(geometry_msgs/Twist)、底盘驱动节点、坐标变换(tf库)等。自动驾驶路径规划部分重点探讨了move_base、A*算法及环境建模方法。创新题引入量子节点、拓扑虫洞等前沿概念,拓展了传统机器人技术的边界。资料强调理论与实践结合,需掌握ROS工具链(RViz、gmapping等)和算法原理(PID控制、QFT等),为移动机器人开发提供系统知识框架。
相关文章:
2024-2025-2-《移动机器人设计与实践》-复习资料-8……
2024-2025-2-《移动机器人设计与实践》-复习资料-1-7-CSDN博客 08 移动机器人基础编程 单选题(6题) 在ROS中,用于移动机器人速度控制的消息类型通常是? A. std_msgs/StringB. geometry_msgs/TwistC. sensor_msgs/ImageD. nav_ms…...
如何监测光伏系统中的电能质量问题?分布式光伏电能质量解决方案
根据光伏相关技术规范要求,通过10(6)kV~35kV电压等级并网的变流器类型分布式电源应在公共连接点装设满足GB/T 19862要求的A级电能质量监测装置。用于监测分布式光伏发出的电能的质量,指标包括谐波、电压偏差、电压不平衡度、电压波动和闪变等。 CET中电…...

电子电路:全面深入了解晶振的定义、作用及应用
本次了解重点: 1.压电效应的数学描述 2.生产工艺以及关键工序 3.电路设计部分如负阻原理和匹配电容计算 4.失效案例比如冷启动问题 5.新形态晶振技术引入5G和量子计算 6.温补晶振的补偿机制 7故障案例讲解-更换负载电池或增加预热电路 蓝牙音频断续-频偏导致 工控机死机-起振电…...

Day-15【选择与循环】选择结构-if语句
目录 一、if语句 (1)单分支选择结构 (2)双分支选择结构 (3)多分支选择结构 (4)if-else的嵌套使用 二、开关分支语句(switch) (1)…...

定时器时钟来源可以从输入捕获引脚输入
外部时钟模式 和 输入捕获。 核心结论: 外部时钟模式的输入引脚 ≠ 输入捕获功能的输入引脚(通常情况): 外部时钟模式有专用的输入引脚 (ETR) 和可选的替代输入通道(如TI1, TI2)。 输入捕获功能有自己的专…...
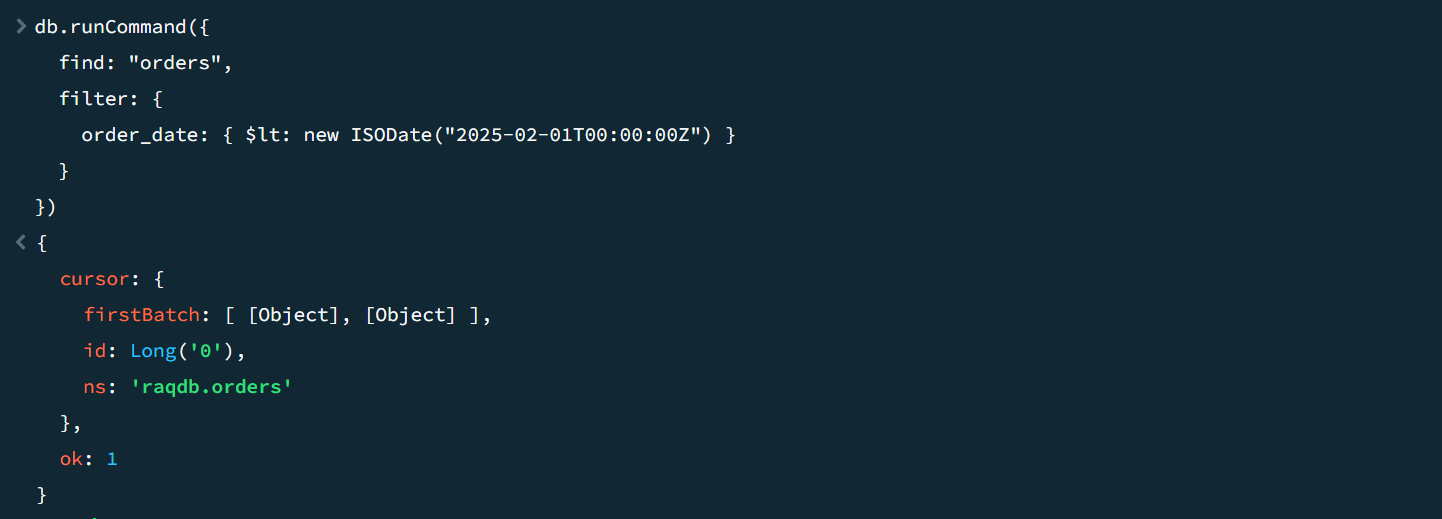
SPL 轻量级多源混算实践 4 - 查询 MongoDB
除了以上常见数据源,还有 NoSQL、MQ 等数据源,其中以 MongoDB 最为常用。我们用 SPL 连接 MongoDB 做计算。 导入 MongoDB 数据。 外部库 SPL 支持的多种数据源大概分两类,一类是像 RDB 有 JDBC 直接使用,或者文件等直接读取&a…...

星敏感器:卫星姿态测量的“星空导航仪”
星敏感器:卫星姿态测量的“星空导航仪” 1. 引言 在卫星、航天器和深空探测器的姿态控制系统中,星敏感器(Star Tracker) 是最精确的姿态测量设备之一。它通过识别恒星的位置,计算出航天器在惯性空间中的三轴姿态&…...

Cat.1与Cat.4区别及应用场景
Cat.1 和 Cat.4 都是 LTE(4G)网络中的终端设备类别,主要区别在于 数据传输速率、复杂度和功耗,这直接影响了它们的应用场景和成本。 以下是它们的主要区别: 数据传输速率 (核心区别): Cat.1 (Category 1)&…...

大宽带怎么做
我有10个G的宽带资源,怎样运行P2P才能将收益巨大化,主要有以下几种方式: 1.多设备汇聚模式:使用多台支持千兆网络的服务器或专用PCDN设备(如N1盒子),将10条宽带分别接入不同设备,通过…...
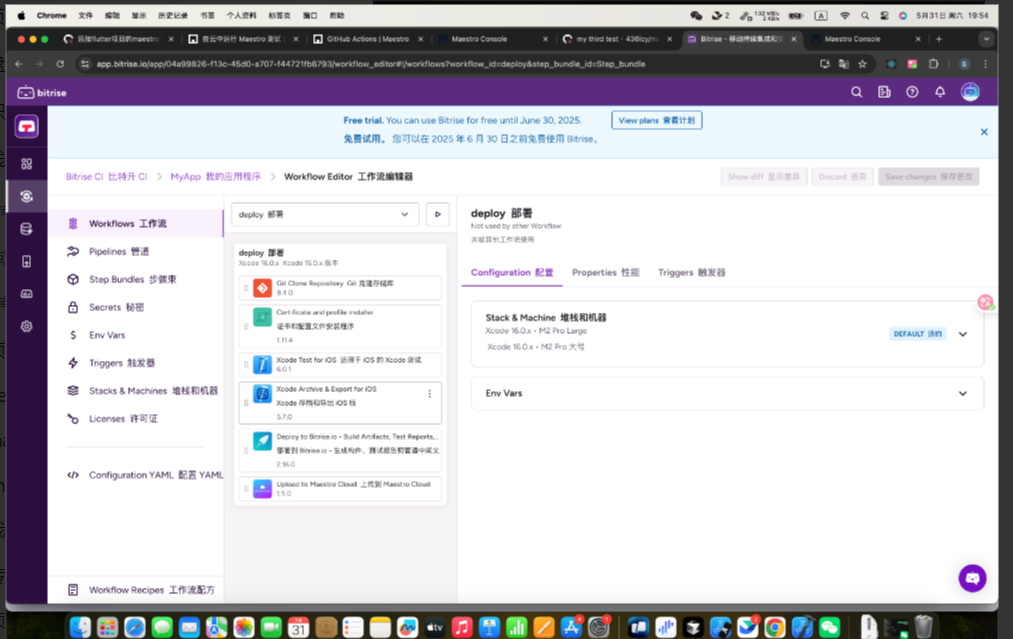
Maestro CLI云端测试以及github cl,bitrise原生cl的测试流程
昨天我们了解了maestro测试框架以及maestro studio工具以及创建我们的第一个flow,然后通过例子在maestro cli云端进行测试请求并且成功,今天我们就在我们自己的app上简单的进行三种测试流程,maestro cli云端测试,github cl集成测试…...

[内核开发手册] ARM汇编指令速查表
ARM汇编指令速查表 指令描述语法示例push将一个或多个寄存器的值压入栈中,更新栈指针寄存器。push {r1, r2, r3}add执行加法并将结果存储到目标操作数中。add r1, r2, #5push.w将指定的寄存器的值压入栈中,并将栈指针向下调整4个字节。push.w {r4, r5, …...
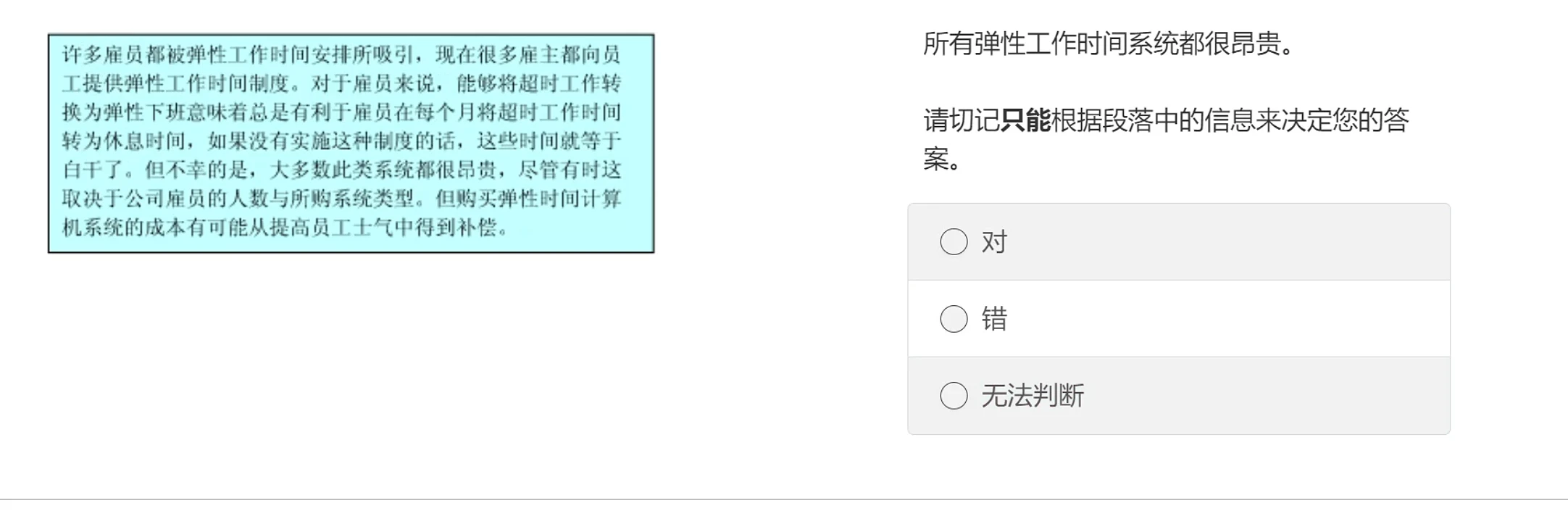
25年宁德时代新能源科技SHL 测评语言理解数字推理Verify题库
宁德时代新能源科技的SHL测评中,语言理解部分主要考察阅读理解、逻辑填空和语句排序等题型,要求应聘者在17分钟内完成30题。阅读理解需要快速捕捉文章主旨和理解细节信息;逻辑填空则要根据语句逻辑填入最合适的词汇;语句排序是将打…...
AutoGenTestCase - 借助AI大模型生成测试用例
想象一下,你正在为一个复杂的支付系统编写测试用例,需求文档堆积如山,边缘场景层出不穷,手动编写让你焦头烂额。现在,有了AutoGenTestCase,这个AI驱动的“测试用例生成机”可以从需求文档中自动生成数百个测…...

区块链技术赋能供应链金融:重塑信任与效率
在当今全球经济一体化的背景下,供应链金融作为连接产业与金融的桥梁,正面临着前所未有的机遇与挑战。然而,传统的供应链金融模式存在着诸多痛点,如信息不对称、信任缺失、操作效率低下等。随着区块链技术的兴起,这些问…...

vue+cesium示例:3Dtiles三维模型高度调整(附源码下载)
接到一位知识星友的邀请,实现他需要3Dtiles三维模型的简单高度调整需求,适合学习Cesium与前端框架结合开发3D可视化项目。 demo源码运行环境以及配置 运行环境:依赖Node安装环境,demo本地Node版本:推荐v18。 运行工具:…...
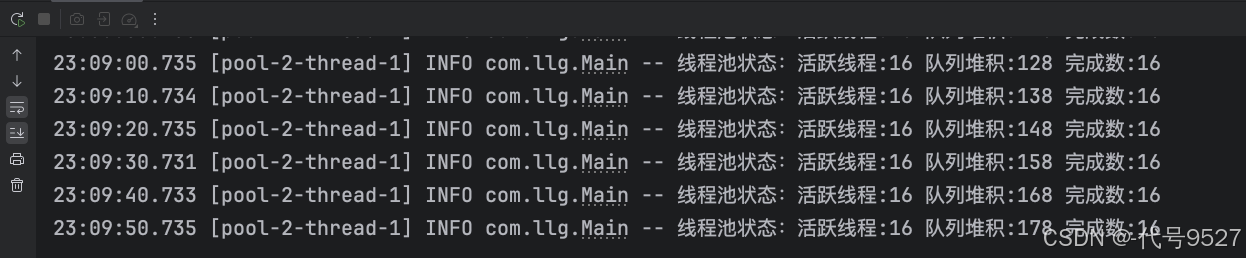
线程池RejectedExecutionException异常
文章目录 1、报错2、定位3、修复4、线程池使用的一点思考 1、报错 检索项目日志时,发现一个异常堆栈信息,核心报错: java.util.concurrent.RejectedExecutionException: Task java.util.concurrent.CompletableFuture$AsyncSupply480a10c7…...

lanqiaoOJ 1508:N皇后问题 ← dfs
【题目来源】 https://www.lanqiao.cn/problems/1508/learning/ 【题目描述】 在 NN 的方格棋盘放置了 N 个皇后,使得它们不相互攻击(即任意 2 个皇后不允许处在同一排,同一列,也不允许处在与棋盘边框成 45角的斜线上。你的任务是…...

当 “欧洲版 Cursor” 遇上安全危机
在 AI 编程助手蓬勃发展的当下,安全问题正成为行业不容忽视的隐忧。近期,AI 编程助手公司 Replit 与号称 “欧洲版 Cursor” 的 Lovable 之间,因安全漏洞问题掀起了一场风波,引发了业界的广泛关注。 Replit 的员工 Matt Palmer…...

[蓝桥杯]生物芯片
生物芯片 题目描述 X 博士正在研究一种生物芯片,其逻辑密集度、容量都远远高于普通的半导体芯片。 博士在芯片中设计了 nn 个微型光源,每个光源操作一次就会改变其状态,即:点亮转为关闭,或关闭转为点亮。 这些光源…...

Spring Boot使用Redis实现分布式锁
在分布式系统中,分布式锁是一种解决并发问题的常用技术。Redis由于其高性能和丰富的特性,成为实现分布式锁的理想选择。本文将详细介绍如何在Spring Boot应用中使用Redis实现分布式锁。 一、环境准备 安装Redis:确保已经安装并运行Redis服务…...
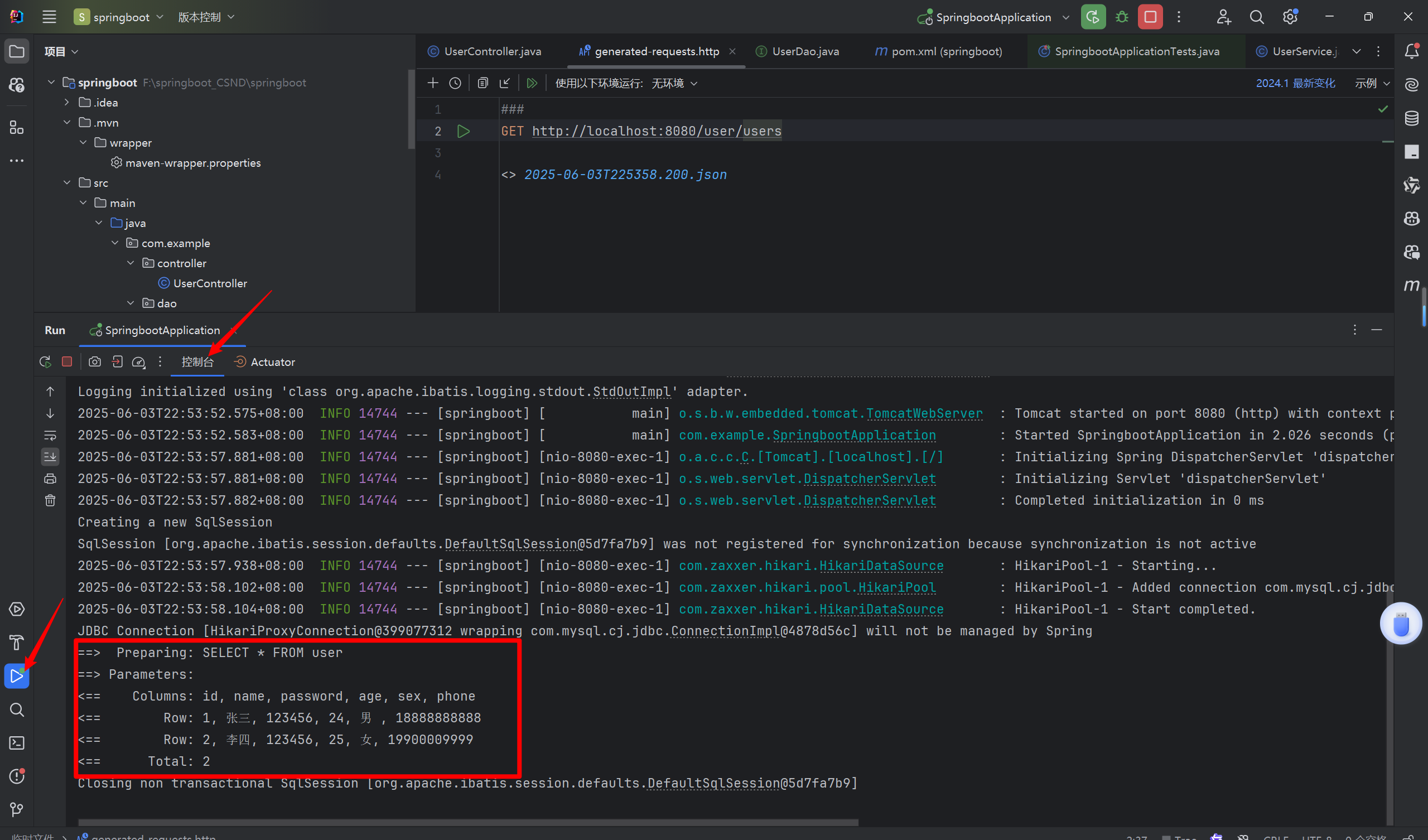
【如何在IntelliJ IDEA中新建Spring Boot项目(基于JDK 21 + Maven)】
AA. 我的开发环境配置与核心工具链解析 一、开发环境全览 C:\Users\Again>java -version java version "21.0.1" 2023-10-17 LTS Java(TM) SE Runtime Environment (build 21.0.112-LTS-29) Java HotSpot(TM) 64-Bit Server VM (build 21.0.112-LTS-29, mixed m…...

(Python网络爬虫);抓取B站404页面小漫画
目录 一. 分析网页 二. 准备工作 三. 实现爬虫 1. 抓取工作 2. 分析工作 3. 拼接主函数&运行结果 四. 完整代码清单 1.多线程版本spider.py: 2.异步版本async_spider.py: 经常逛B站的同志们可能知道,B站的404页面做得别具匠心&…...
【氮化镓】GaN HMETs器件物理失效分析进展
2021 年 5 月,南京大学的蔡晓龙等人在《Journal of Semiconductors》期刊发表了题为《Recent progress of physical failure analysis of GaN HEMTs》的文章,基于多种物理表征技术及大量研究成果,对 GaN HEMTs 的常见失效机制进行了系统分析。文中先介绍失效分析流程,包括使…...

vb.net oledb-Access 数据库本身不支持命名参数,赋值必须和参数顺序一致才行
参数顺序问题:OleDb 通常依赖参数添加的顺序而非名称,为什么顺序要一样? OleDbParameter 顺序依赖性的原因 OleDb 数据提供程序依赖参数添加顺序而非名称,这是由 OLE DB 规范和 Access 数据库的工作机制共同决定的。理解这个问题需要从数据库底层通信…...
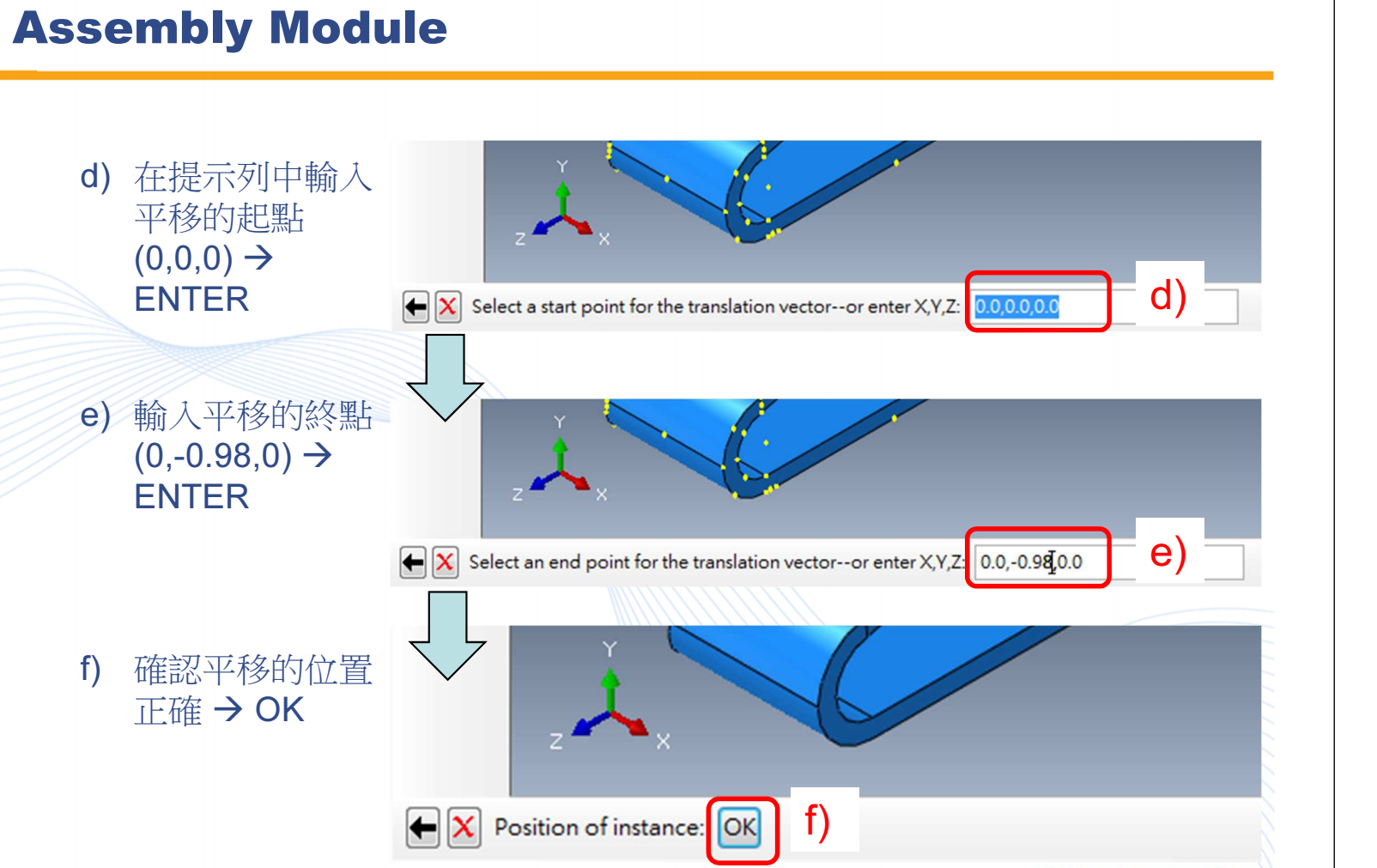
Abaqus连接器弹片正向力分析:
.学习重点: • 外部幾何匯入。 • 建立解析剛性面。 • 利用Partition與局部撒點來提高網格品質。 • 材料塑性行為(材料非線性)。 • 考慮大變形(幾何非線性)。 • 接觸(邊界非線性)。 • 平移組裝。 • 設定輸出參數。 • 討論Shear Locking & Hourglassing效應。 1) 設…...

鸿蒙生态再添翼:身份证银行卡识别引领智能识别技术新篇章
随着信创国产化战略的深入推进和鸿蒙操作系统(HarmonyOS Next)的迅速崛起,市场对兼容国产软件生态的需求日益增长。在这一背景下,中安身份证识别和银行卡识别技术应运而生,为鸿蒙生态的发展注入了新的活力。 移动端身份…...

mybatis打印完整的SQL,p6spy
介绍打印完成的SQL,会降低性能,不要在生产环境使用,我只是在本地,自己的代码中设置,不提交。主要是为了方便,在控制台看见SQL的时候,不用去拼接参数,可以直接复制出来执行。 配置方…...
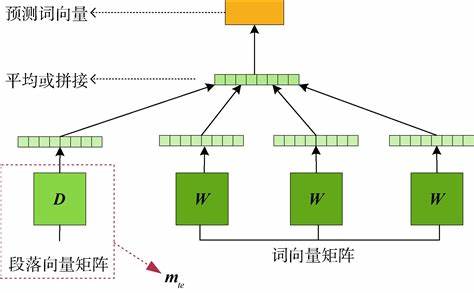
NLP学习路线图(十九):GloVe
自然语言处理(NLP)的核心挑战在于让机器理解人类语言的丰富含义。词向量(Word Embeddings)技术通过将词语映射到高维实数空间,将离散的符号转化为连续的向量,为NLP任务奠定了坚实基础。在众多词向量模型中&…...
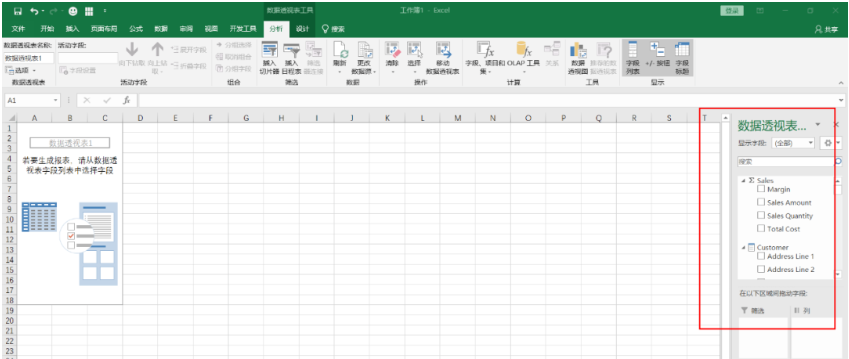
如何使用DAXStudio将PowerBI与Excel连接
如何使用DAXStudio将PowerBI与Excel连接 之前分享过一篇自动化文章:PowerBI链接EXCEL实现自动化报表,使用一个EXCEL宏工作薄将PowerBI与EXCEL连接起来,今天分享另一个方法:使用DAX Studio将PowerBI与EXCEL连接。 下面是使用DAX S…...
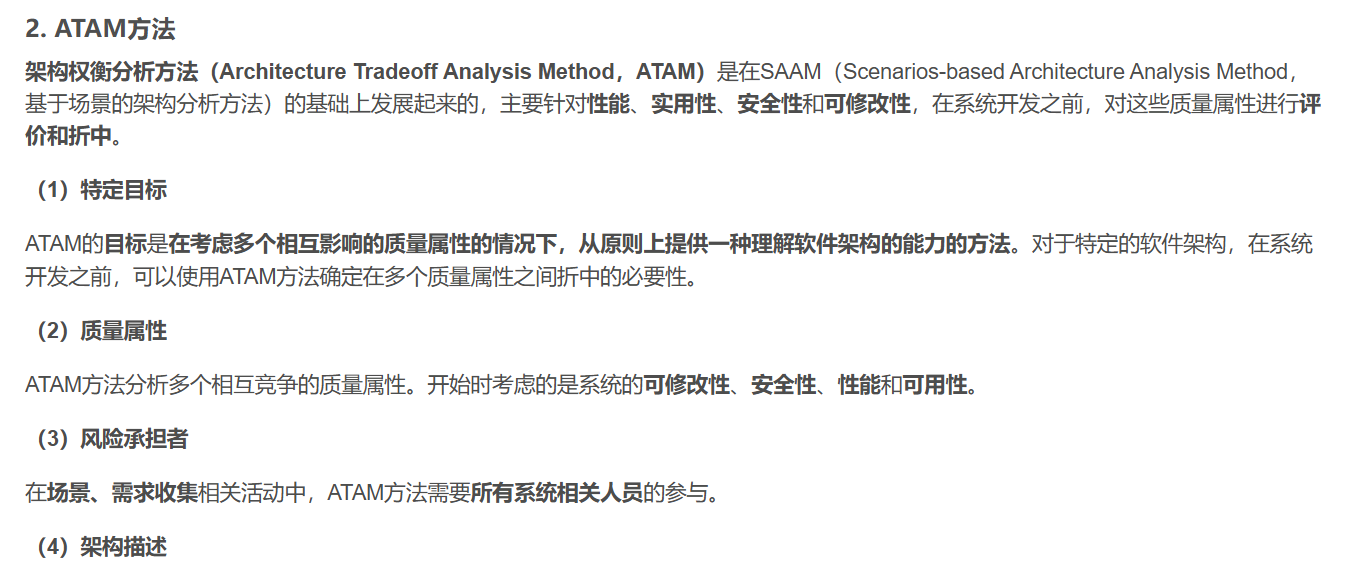
软考 系统架构设计师系列知识点之杂项集萃(79)
接前一篇文章:软考 系统架构设计师系列知识点之杂项集萃(78) 第141题 软件测试一般分为两个大类:动态测试和静态测试。前者通过运行程序发现错误,包括()等方法;后者采用人工和计算机…...