BEV和OCC学习-3:mmdet3d 坐标系
目录
坐标系
转向角 (yaw) 的定义
框尺寸的定义
与支持的数据集的原始坐标系的关系
KITTI
Waymo
NuScenes
Lyft
ScanNet
SUN RGB-D
S3DIS
坐标系
坐标系 — MMDetection3D 1.4.0 文档https://mmdetection3d.readthedocs.io/zh-cn/latest/user_guides/coord_sys_tutorial.html
- 相机坐标系 – 大多数相机的坐标系,在该坐标系中 y 轴正方向指向地面,x 轴正方向指向右侧,z 轴正方向指向前方。
- 激光雷达坐标系 – 众多激光雷达的坐标系,在该坐标系中 z 轴负方向指向地面,x 轴正方向指向前方,y 轴正方向指向左侧。
- 深度坐标系 – VoteNet、H3DNet 等模型使用的坐标系,在该坐标系中 z 轴负方向指向地面,x 轴正方向指向右侧,y 轴正方向指向前方。
三个坐标系的图示如下:
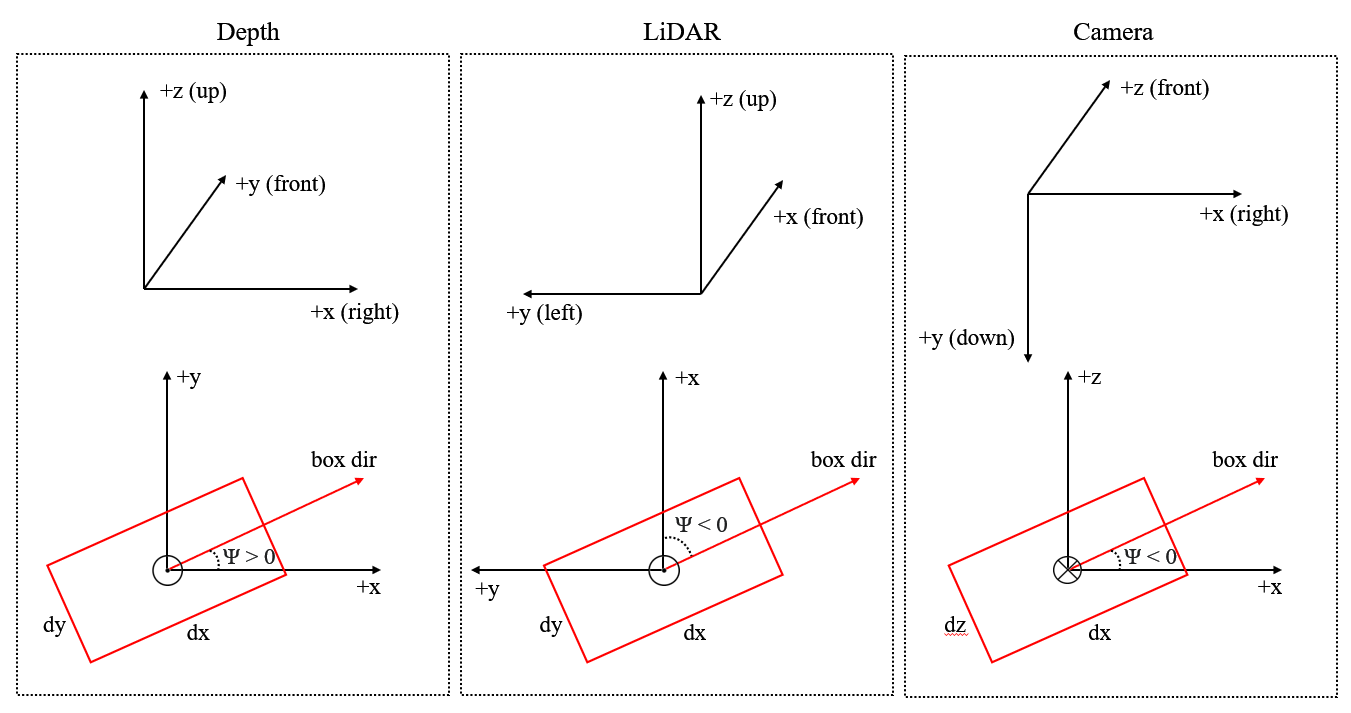
上面三张图是 3D 坐标系,下面三张图是鸟瞰图。以后我们将坚持使用本教程中定义的三个坐标系。
转向角 (yaw) 的定义
在目标检测中,我们选择一个轴作为重力轴,并在垂直于重力轴的平面 $\Pi$ 上选取一个参考方向,那么参考方向的转向角为 0,在上的其他方向有非零的转向角,其角度取决于其与参考方向的角度。目前,对于所有支持的数据集,标注不包括俯仰角 (pitch) 和滚动角 (roll),这意味着我们在预测框和计算框之间的重叠时只需考虑转向角 (yaw)。
在 MMDetection3D 中,所有坐标系都是右手坐标系,这意味着如果从重力轴的负方向(轴的正方向指向人眼)看,转向角 (yaw) 沿着逆时针方向增加。
下图显示,在右手坐标系中,如果我们设定 x 轴正方向为参考方向,那么 y 轴正方向的转向角 (yaw) 为。
z 上 y 前 (yaw=0.5*pi)^ ^| /| /| /|/ 左 (yaw=pi) ------ 0 ------> x 右 (yaw=0)
对于一个框来说,其转向角 (yaw) 的值等于其方向减去一个参考方向。在 MMDetection3D 的所有三个坐标系中,参考方向总是 x 轴的正方向,而如果一个框的转向角 (yaw) 为 0,则其方向被定义为与 x 轴平行。框的转向角 (yaw) 的定义如下图所示。
y 前^ 框的方向 (yaw=0.5*pi)/|\ ^| /|\| ____|____| | | || | | | __|____|____|____|______\ x 右| | | | /| | | || |____|____||
框尺寸的定义
框尺寸的定义与转向角 (yaw) 的定义是分不开的。在上一节中,我们提到如果一个框的转向角 (yaw) 为 0,它的方向就被定义为与 x 轴平行。那么自然地,一个框对应于 x 轴的尺寸应该是 $dx$。但是,这在某些数据集中并非总是如此(我们稍后会解决这个问题)。
下图展示了 x 轴和,y 轴和
对应的含义。
y 前^ 框的方向 (yaw=0.5*pi)/|\ ^| /|\| ____|____| | | || | | | dx __|____|____|____|______\ x 右| | | | /| | | || |____|____|| dy
注意框的方向总是和 边平行。
y 前^ _________/|\ | | || | | || | | | dy| |____|____|____\ 框的方向 (yaw=0)| | | | / __|____|____|____|_________\ x 右| | | | /| |____|____|| dx|
与支持的数据集的原始坐标系的关系
KITTI
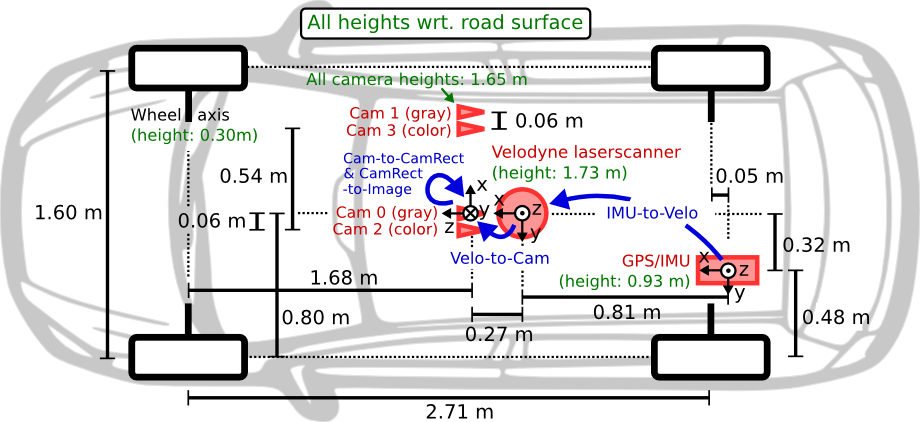
KITTI数据集的原始标注是在相机坐标系下的,详见 get_label_anno。在 MMDetection3D 中,为了在 KITTI 数据集上训练基于激光雷达的模型,首先将数据从相机坐标系转换到激光雷达坐标,详见 get_ann_info。对于训练基于视觉的模型,数据保持在相机坐标系不变。
在 SECOND 中,框的激光雷达坐标系定义如下(鸟瞰图):
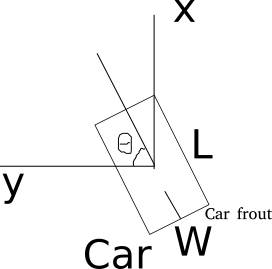
对于每个框来说,尺寸为 $(w, l, h)$,转向角 (yaw) 的参考方向为 y 轴正方向。更多细节请参考代码库。
我们的激光雷达坐标系有两处改变:
-
转向角 (yaw) 被定义为右手而非左手,从而保持一致性;
-
框的尺寸为 $(l, w, h)$ 而非 $(w, l, h)$,由于在 KITTI 数据集中 $w$ 对应 $dy$,$l$ 对应 $dx$。
Waymo
我们使用 Waymo 数据集的 KITTI 格式数据。因此,在我们的实现中 KITTI 和 Waymo 也共用相同的坐标系。
NuScenes
NuScenes 提供了一个评估工具包,其中每个框都被包装成一个 Box 实例。Box 的坐标系不同于我们的激光雷达坐标系,在 Box 坐标系中,前两个表示框尺寸的元素分别对应 $(dy, dx)$ 或者 $(w, l)$,和我们的表示方法相反。更多细节请参考 NuScenes 教程。读者可以参考 NuScenes 开发工具,了解 NuScenes 框 的定义和 NuScenes 评估的过程。
Lyft
就涉及坐标系而言,Lyft 和 NuScenes 共用相同的数据格式。请参考官方网站获取更多信息。
ScanNet
ScanNet 的原始数据不是点云而是网格,需要在我们的深度坐标系下进行采样得到点云数据。对于 ScanNet 检测任务,框的标注是轴对齐的,并且转向角 (yaw) 始终是 0。因此,我们的深度坐标系中转向角 (yaw) 的方向对 ScanNet 没有影响。
SUN RGB-D
SUN RGB-D 的原始数据不是点云而是 RGB-D 图像。我们通过反投影,可以得到每张图像对应的点云,其在我们的深度坐标系下。但是,数据集的标注并不在我们的系统中,所以需要进行转换。
将原始标注转换为我们的深度坐标系下的标注的转换过程请参考 sunrgbd_data_utils.py。
S3DIS
在我们的实现中,S3DIS 与 ScanNet 共用相同的坐标系。然而 S3DIS 是一个仅限于分割任务的数据集,因此没有标注是坐标系敏感的。
相关文章:
BEV和OCC学习-3:mmdet3d 坐标系
目录 坐标系 转向角 (yaw) 的定义 框尺寸的定义 与支持的数据集的原始坐标系的关系 KITTI Waymo NuScenes Lyft ScanNet SUN RGB-D S3DIS 坐标系 坐标系 — MMDetection3D 1.4.0 文档https://mmdetection3d.readthedocs.io/zh-cn/latest/user_guides/coord_sys_tuto…...
[蓝桥杯]图形排版
图形排版 题目描述 小明需要在一篇文档中加入 NN 张图片,其中第 ii 张图片的宽度是 WiWi,高度是 HiHi。 假设纸张的宽度是 MM,小明使用的文档编辑工具会用以下方式对图片进行自动排版: 1. 该工具会按照图片顺序࿰…...

【Linux仓库】冯诺依曼体系结构与操作系统【进程·壹】
🌟 各位看官好,我是! 🌍 Linux Linux is not Unix ! 🚀 今天来学习冯诺依曼体系结构与操作系统。 👍 如果觉得这篇文章有帮助,欢迎您一键三连,分享给更多人哦࿰…...
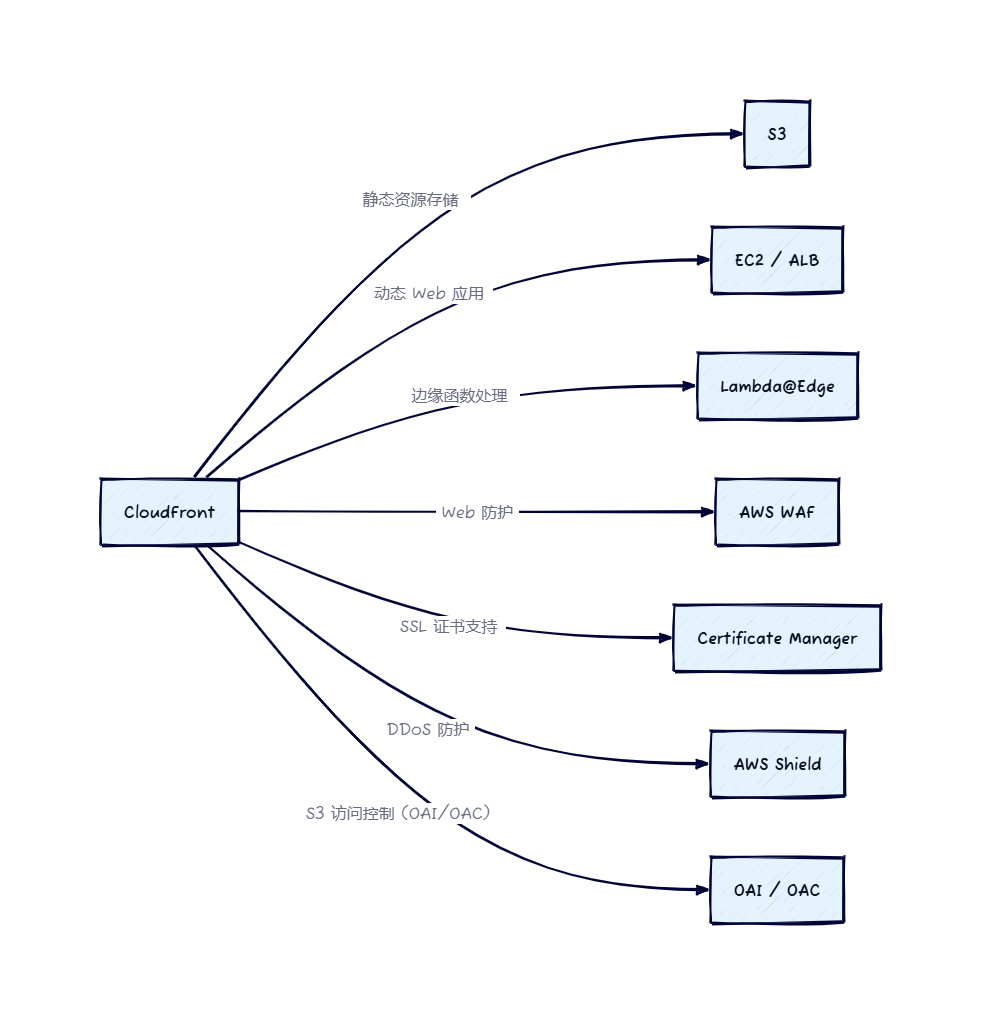
CloudFront 加速详解:AWS CDN 怎么用?
让全球访问更快速稳定,深入解读 AWS 的内容分发网络 在上一篇中,我们介绍了 Amazon S3 对象存储,它非常适合托管静态资源,比如图片、视频、网页等。但你可能遇到过这样的问题: “我把网站静态文件部署到了 S3…...
《高级架构师》------- 考后感想
笔者来聊一下架构师考后的感想 复习备考 考前过了很多知识点,只是蜻蜓点水,没有起到复习的作用,即使考出来也不会,下次复习注意这个,复习到了,就记住,或者画出来,或者文件总结&…...
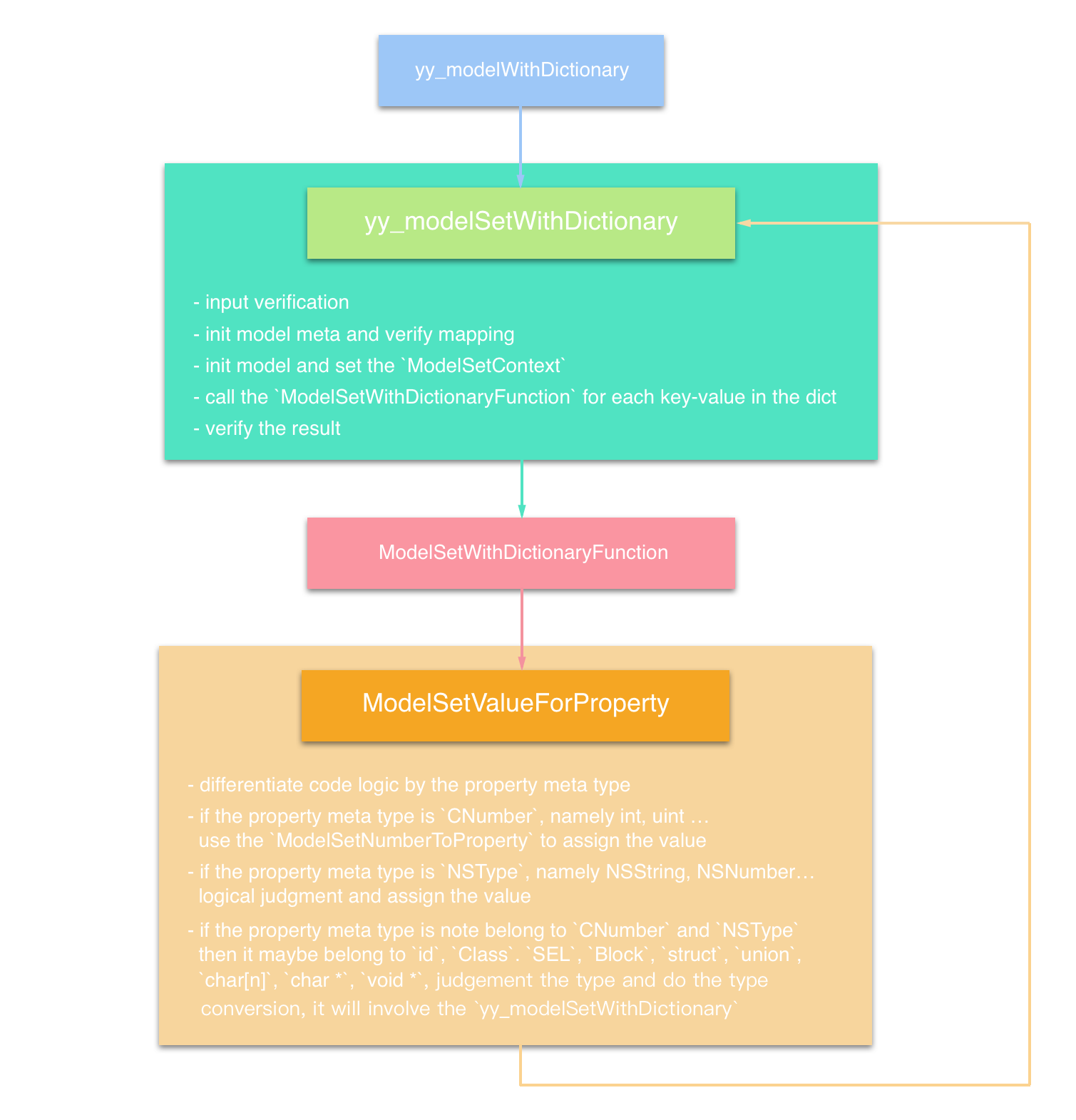
【iOS】YYModel源码解析
YYModel源码解析 文章目录 YYModel源码解析前言YYModel性能优势YYModel简介YYClassInfo解析YYClassIvarInfo && objc_ivarYYClassMethodInfo && objc_methodYYClassPropertyInfo && property_tYYClassInfo && objc_class YYClassInfo的初始化细…...

C++算法训练营 Day6 哈希表(1)
1.有效的字母异位词 LeetCode:242.有效的字母异位词 给定两个字符串s和t ,编写一个函数来判断t是否是s的字母异位词。 示例 1: 输入: s “anagram”, t “nagaram” 输出: true 示例 2: 输入: s “rat”, t “car” 输出: false 解题思路ÿ…...
【C语言编译与链接】--翻译环境和运行环境,预处理,编译,汇编,链接
目录 一.翻译环境和运行环境 二.翻译环境 2.1--预处理(预编译) 2.2--编译 2.2.1--词法分析 2.2.2--语法分析 2.2.3--语义分析 2.3--汇编 2.4--链接 三.运行环境 🔥个人主页:草莓熊Lotso的个人主页 🎬作者简介:C研发…...
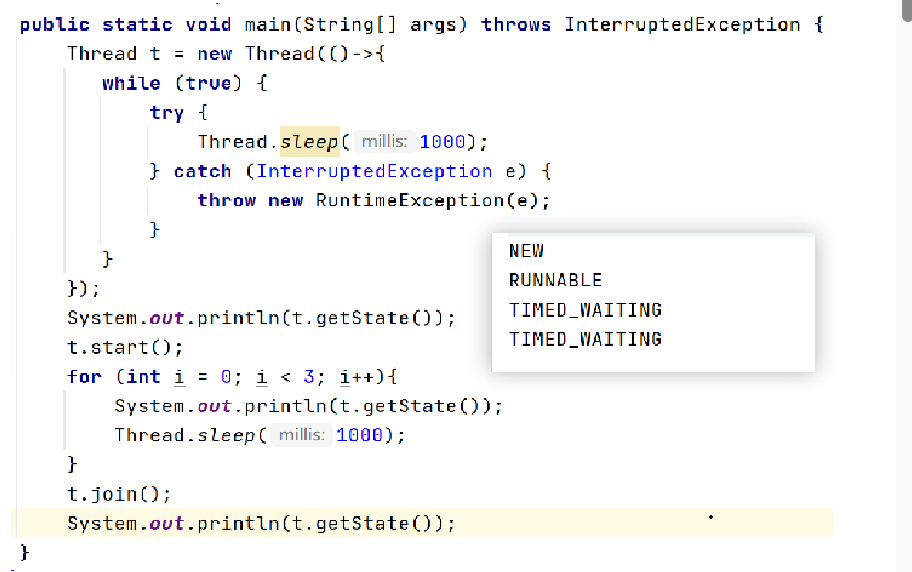
【JavaEE】多线程
8.线程状态 根据 Java 的Thread.state包,线程一共有六种状态: NEWRUNNABLEBLOCKEDWAITINGTIMED_WAITINGTERMINATED 二、每种状态的含义 1. NEW(新建) 当使用new 关键字创建一个线程对象,但尚未调用其start() 方法时…...
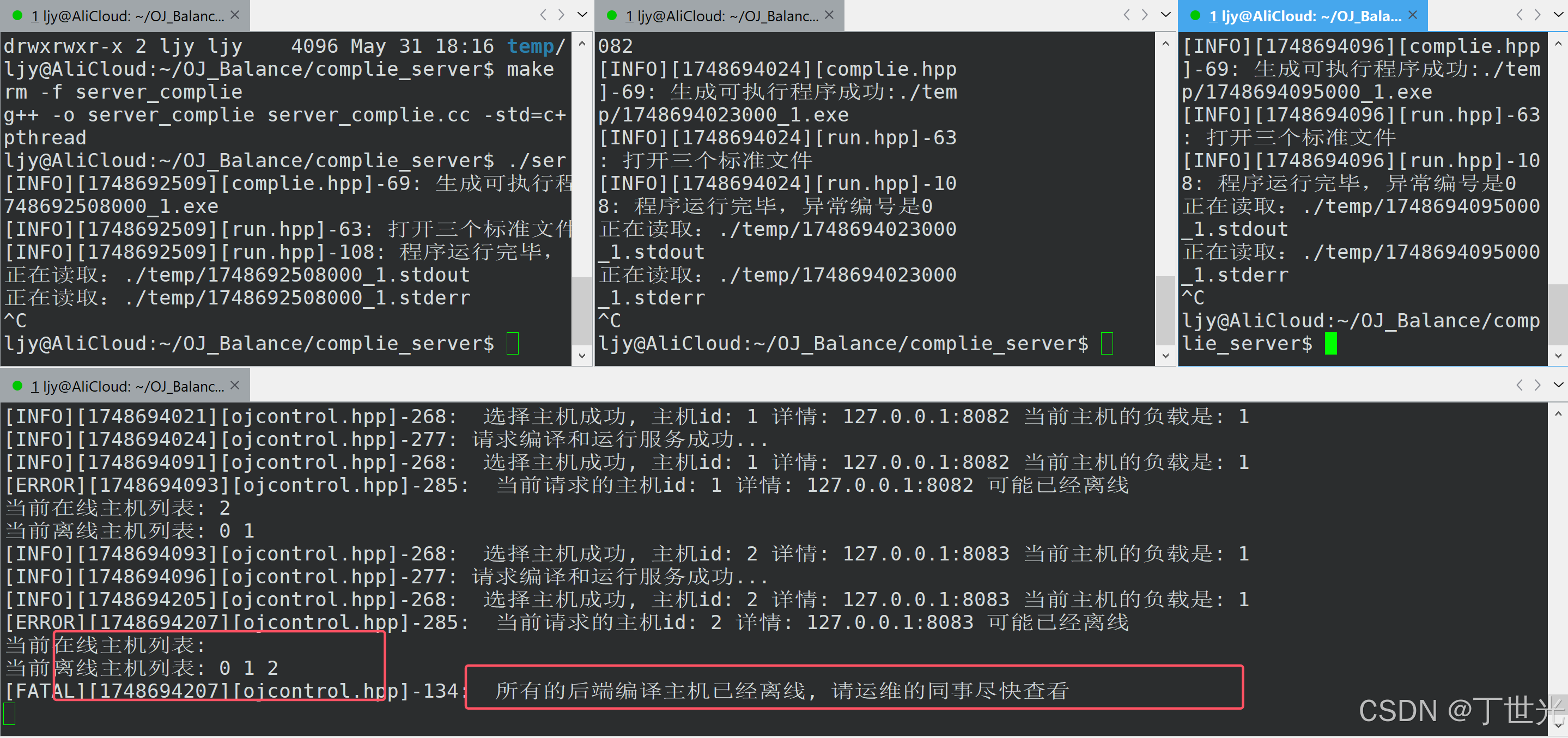
【项目】在线OJ(负载均衡式)
目录 一、项目目标 二、开发环境 1.技术栈 2.开发环境 三、项目树 目录结构 功能逻辑 编写思路 四、编码 1.complie_server 服务功能 代码蓝图 开发编译功能 日志功能 编辑 测试编译模块 开发运行功能 设置运行限制 jsoncpp 编写CR 如何生成唯一文件名 …...

贪心算法应用:在线租赁问题详解
贪心算法应用:在线租赁问题详解 贪心算法是一种在每一步选择中都采取当前状态下最优的选择,从而希望导致结果是全局最优的算法策略。在线租赁问题(Greedy Algorithm for Online Rentals)是一个经典的贪心算法应用场景,下面我将从多个维度全面…...
用法简介)
torch.zeros()用法简介
torch.zeros()是PyTorch中用于创建全零张量的核心函数,其功能和使用方法如下: 1. 基本语法 torch.zeros(*size, outNone, dtypeNone, layouttorch.strided, deviceNone, requires_gradFalse)参数说明: *size:定义张量形状的…...
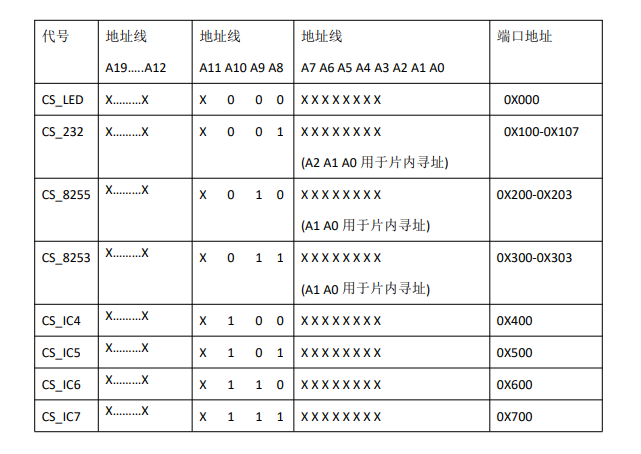
Prj10--8088单板机C语言8259测试(1)
1.原理图 2.Deepseek示例代码 #include <dos.h> #include <conio.h> #include <stdio.h>#define PIC1_CMD 0x400 // 命令端口 (A00) #define PIC1_DATA 0x401 // 数据端口 (A01)volatile int int_count 0; // 中断计数器 void interrupt (*old_isr)(…...

3步在小米13手机跑DeepSeek R1
大家好!我是羊仔,专注AI工具、智能体、编程。 一、从性能旗舰到AI主机 春节大扫除时,翻出尘封的小米13,这台曾以骁龙8 Gen2著称的性能小钢炮,如今正在执行更科幻的使命——本地运行DeepSeek R1。 想起两年前用它连续肝…...
)
数智管理学(十六)
二、分布式网络型结构的特点 分布式网络型结构是一种去中心化、扁平化和协作性的组织模式,与传统金字塔型结构形成鲜明对比。它通过赋予团队和个体更大的自主权,提升组织的灵活性和响应能力。 (一)节点化组织 1.模块化团队构成…...
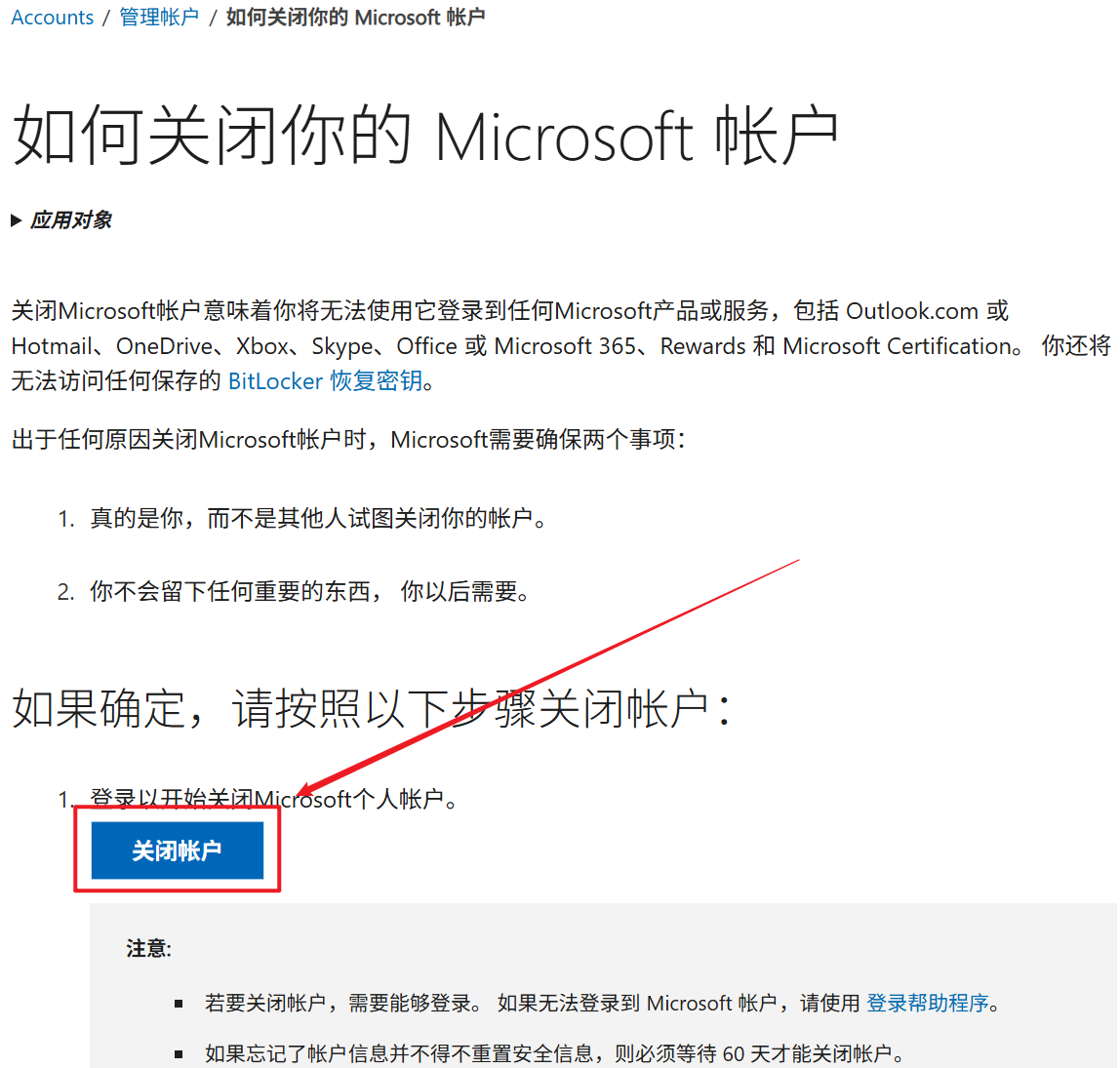
注销微软账户
因为我的微软开发者账户丢失 Office E5 权限,因此需要注销。 若你需要注销微软账号,请点击下方超链接。 点击此处 注销之后仅剩一个正常的账户使用咯!!...
Ubuntu 服务器软件更新,以及常用软件安装 —— 一步一步配置 Ubuntu Server 的 NodeJS 服务器详细实录 3
前言 前面,我们已经 安装好了 Ubuntu 服务器系统,并且 配置好了 ssh 免密登录服务器 ,现在,我们要来进一步的设置服务器。 那么,本文,就是进行服务器的系统更新,以及常用软件的安装 调整 Ubu…...

Mysql常用知识3:Kafka和数据库优化
文章目录 一、分布式消息系统(Kafka相关问题5-10)5. Kafka如何保证消息不丢失?6. 项目中Kafka具体怎么使用的?7. 消息异常未发送成功怎么解决?8. 重试具体怎么做的,循环吗?9. 重试多次失败怎么办…...

Milvus单机模式安装和试用
1.安装ollama的package包; # install package pip install -U langchain-ollama2.我们直接使用ChatOllama实例化模型,并通过invoke进行调用; from langchain_ollama import ChatOllamallm ChatOllama(model"deepseek-r1") messa…...
飞牛NAS+Docker技术搭建个人博客站:公网远程部署实战指南
文章目录 前言1. Docker下载源设置2. Docker下载WordPress3. Docker部署Mysql数据库4. WordPress 参数设置5. 飞牛云安装Cpolar工具6. 固定Cpolar公网地址7. 修改WordPress配置文件8. 公网域名访问WordPress总结 前言 在数字化浪潮中,传统网站搭建方式正面临前所未…...
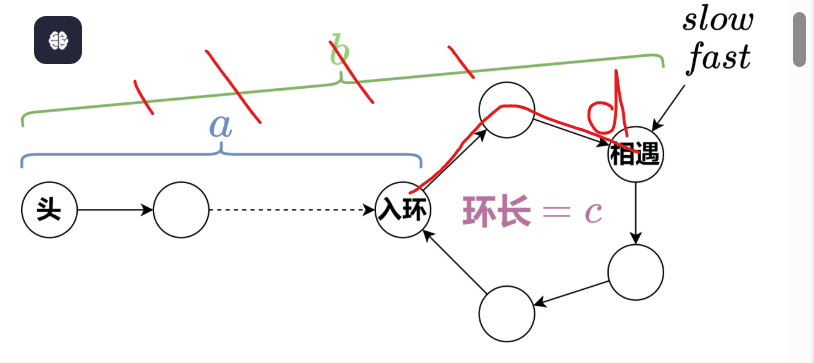
刷leetcode hot100返航必胜版--链表6/3
链表初始知识 链表种类:单链表,双链表,循环链表 链表初始化 struct ListNode{ int val; ListNode* next; ListNode(int x): val(x),next(nullptr) {} }; //初始化 ListNode* head new ListNode(5); 删除节点、添加…...

C# 序列化技术全面解析:原理、实现与应用场景
在软件开发中,数据持久化和网络通信是两个至关重要的环节。想象一下,当我们需要将一个复杂的对象保存到文件中,或者通过网络发送到另一台计算机时,如何有效地表示这个对象?这就是序列化技术要解决的问题。序列化&#…...

isp调试 blend模式指什么
isp调试 blend模式指什么 答案摘自豆包: 在图像信号处理(ISP,Image Signal Processor)调试中,Blend 模式(混合模式) 是指将不同处理阶段的图像数据或不同来源的图像信息按照特定规则进行叠加或…...
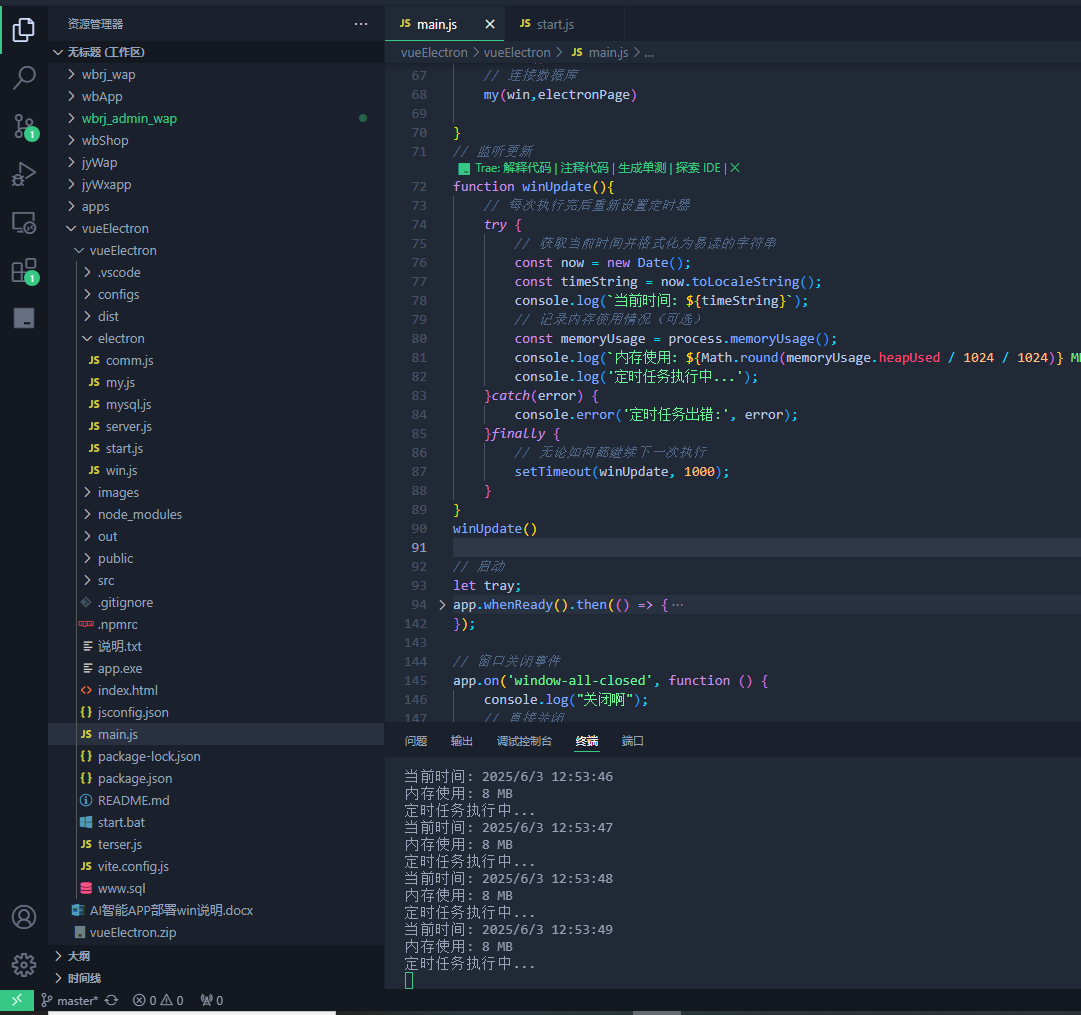
electron定时任务,打印内存占用情况
// 监听更新 function winUpdate(){// 每次执行完后重新设置定时器try {// 获取当前时间并格式化为易读的字符串const now new Date();const timeString now.toLocaleString();console.log(当前时间: ${timeString});// 记录内存使用情况(可选)const m…...

Gitee Wiki:以知识管理赋能 DevSecOps,推动关键领域软件自主演进
关键领域软件研发中的知识管理困境 传统文档管理模式问题显著 关键领域软件研发领域,传统文档管理模式问题显著:文档存储无系统,查找困难,降低效率;更新不及时,与实际脱节,误导开发࿱…...

学习STC51单片机24(芯片为STC89C52RCRC)
每日一言 把 “我不行” 换成 “我试试”,你会发现一片新的天地。 那关于优化 白盒测试 我们之前不是通过这个接线方式可以看到返回到信息嘛因为安信可的特性就是返回Esp8266的反馈,可以看到代码死在哪里了,导致连接不上,因为我们…...
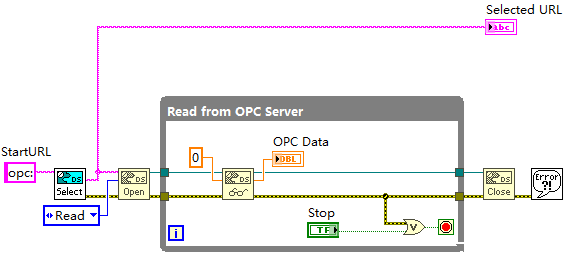
LabVIEW基于 DataSocket从 OPC 服务器读取数据
LabVIEW 中基于 DataSocket 函数从 OPC 服务器读取数据的功能,为工业自动化等场景下的数据交互提供了解决方案。通过特定函数实现 URL 指定、连接建立与管理、数据读取,相比传统 Socket 通信和 RESTful API ,在 OPC 服务器数据交互场景有适配…...

阿里云无影云桌面深度测评
阿里云无影桌面深度测评:解锁云端工作“新范式”的“未来之钥”! 在数字化浪潮席卷全球的2025年,远程办公与混合办公已不再是权宜之计,而是职场不可逆转的新常态。然而,如何确保员工无论身在何处,都能拥有…...

【208】VS2022 C++ 32位整数和unsigned char数组之间互相转换
一、场景 在实际应用中,特别是在数据传输的时候,需要读取unsigned char数组,再转换成 32 位整数;或者把 32 位整数转换成 unsigned char数组进行写入。比如对接西门子PLC的 snap7 就是这样。32 位整数分成有符号的无符号的&#…...

数据库技术
InnoDB是什么?MySQL 和 InnoDB的关系是什么? InnoDB是MySQL数据库系统中最重要且默认的存储引擎。MySQL采用插件式存储引擎架构,作为数据库管理系统本身不直接处理数据存储,而是通过存储引擎接口与InnoDB等引擎交互。InnoDB作为M…...