卫星的“太空陀螺”:反作用轮如何精准控制姿态?
卫星的“太空陀螺”:反作用轮如何精准控制姿态?
在距地面500公里的轨道上,一颗遥感卫星正以7.8km/s的速度飞越目标区域。此时星载计算机发出指令:“滚转15°并对准目标点”。短短数秒后,数吨重的卫星如同被无形之手推动般完成转向,镜头稳定锁定地面——这一切的核心执行者,正是被称为“卫星方向盘”的反作用轮。
一、反作用轮的核心原理:角动量守恒定律
想象你坐在可旋转的办公椅上:当你将手臂水平伸直并快速转动哑铃时,身体会朝反方向旋转——这就是角动量守恒的直观体现。反作用轮(Reaction Wheel, RW)正是基于此原理工作:
- 飞轮加速 → 产生作用于卫星本体的反向扭矩
- 飞轮减速 → 产生同向扭矩
- 维持转速 → 卫星姿态保持固定
转矩方程:
τ ⃗ R W = − I R W ⋅ d ω ⃗ R W d t \vec{\tau}_{RW} = -I_{RW} \cdot \frac{d\vec{\omega}_{RW}}{dt} τRW=−IRW⋅dtdωRW
其中:
- τ ⃗ R W \vec{\tau}_{RW} τRW为输出扭矩(Nm)
- I R W I_{RW} IRW为飞轮转动惯量(kg·m²)
- d ω ⃗ R W d t \frac{d\vec{\omega}_{RW}}{dt} dtdωRW为角加速度(rad/s²)
二、反作用轮系统组成:太空中的精密机械
一套完整的RW系统包含四大核心部件:
1. 飞轮组件
- 碳纤维转子:真空悬浮设计,转速高达6000rpm
- 无刷电机:实现精确转速控制(精度±0.1rpm)
- 轴承系统:磁悬浮或陶瓷滚珠轴承,摩擦扭矩<0.001Nm
2. 姿态传感器
- 星敏感器:通过识别恒星方位确定姿态(精度0.001°)
- 光纤陀螺:实时测量角速度(漂移<0.001°/h)
3. 控制计算机
运行PID控制算法:
u ( t ) = K p e ( t ) + K i ∫ 0 t e ( τ ) d τ + K d d e ( t ) d t u(t) = K_p e(t) + K_i \int_0^t e(\tau)d\tau + K_d \frac{de(t)}{dt} u(t)=Kpe(t)+Ki∫0te(τ)dτ+Kddtde(t)
其中 e ( t ) e(t) e(t)为姿态误差角, u ( t ) u(t) u(t)为输出控制量
4. 动量卸载装置(磁力矩器)
当地球引力梯度等干扰力矩累积导致飞轮饱和时,通过线圈与地磁场相互作用卸载角动量。
三、工作流程:三步实现精准定姿
假设卫星需要从姿态A转动到姿态B:
步骤1:姿态确定
星敏感器获取当前实际姿态角 θ a c t u a l θ_{actual} θactual,与目标值 θ t a r g e t θ_{target} θtarget比较:
误差角 e = θ t a r g e t − θ a c t u a l e = θ_{target} - θ_{actual} e=θtarget−θactual
步骤2:控制计算
PID控制器根据误差 e e e计算所需控制扭矩 τ c m d \tau_{cmd} τcmd:
τ c m d = K p ⋅ e + K i ⋅ ∑ e ⋅ Δ t + K d ⋅ Δ e Δ t \tau_{cmd} = K_p \cdot e + K_i \cdot \sum e \cdot \Delta t + K_d \cdot \frac{\Delta e}{\Delta t} τcmd=Kp⋅e+Ki⋅∑e⋅Δt+Kd⋅ΔtΔe
步骤3:扭矩输出
控制指令驱动飞轮电机:
- 若需顺时针转动卫星 → 飞轮逆时针加速
- 若需逆时针转动卫星 → 飞轮顺时针加速
- 到达目标姿态后 → 维持当前转速锁定姿态
实例演示:
某卫星需绕X轴转动10°:
- 星敏感器检测当前姿态角为2°
- PID计算误差e=8°,输出扭矩指令+0.5Nm
- X轴反作用轮逆时针加速,卫星顺时针转动
- 当姿态角达10°时,飞轮维持新转速
四、关键技术挑战与解决方案
挑战1:角动量饱和
当持续干扰力矩(如太阳光压)导致飞轮转速达到极限时,系统失控。
解决方案:动量卸载
- 磁力矩器产生卸载扭矩: τ ⃗ m a g = m ⃗ × B ⃗ \vec{\tau}_{mag} = \vec{m} \times \vec{B} τmag=m×B
( m ⃗ \vec{m} m为磁矩, B ⃗ \vec{B} B为地磁场强度) - 典型操作周期:每天卸载12次,每次35分钟
挑战2:微振动干扰
飞轮不平衡量引发高频振动(>100Hz),影响高分辨率相机成像。
解决方案:
- 主动振动抑制:压电作动器反向抵消振动
- 隔振平台:采用六自由度Stewart平台隔离载荷
挑战3:热变形影响
轴承摩擦热导致结构变形,改变飞轮转动惯量。
解决方案:
- 热控涂层+热管散热,温控精度±0.5℃
- 在线参数辨识算法实时修正 I R W I_{RW} IRW
五、实际应用案例:哨兵-3卫星的高精度控制
欧洲哨兵-3海洋监测卫星的RW系统参数:
| 参数 | 指标 | 实现效果 |
|---|---|---|
| 飞轮配置 | 4个斜装轮(冗余备份) | 三轴控制+故障容错 |
| 转速范围 | ±6000 rpm | 最大扭矩1.5Nm |
| 姿态确定精度 | 0.003° (3σ) | 海面高程测量误差<2cm |
| 稳定度 | 0.0001°/s | 图像无拖影 |
当卫星进行海岸线扫描时,RW系统需在20秒内完成5°滚转机动并稳定锁定。其控制流程如下:
- 轨道预报系统提前30秒计算机动路径
- 生成三次多项式角度曲线: θ ( t ) = a 0 + a 1 t + a 2 t 2 + a 3 t 3 θ(t)=a_0+a_1t+a_2t^2+a_3t^3 θ(t)=a0+a1t+a2t2+a3t3
- RW按预置加速度曲线执行机动
- 到达目标后切换至PID稳姿模式
六、未来发展方向
-
超导磁悬浮飞轮
日本JAXA研发的真空超导RW,摩擦损耗降低99%,寿命延长至15年。 -
集群智能控制
SpaceX星链卫星采用12个微型RW(直径8cm),通过群体协同算法实现快速编队重构。 -
故障自愈系统
深度学习模型实时监测轴承振动频谱,提前30天预测故障并切换备用轮。
反作用轮如同卫星的“内耳”与“小脑”,在寂静太空中实现着精妙的平衡艺术。从哈勃望远镜凝视宇宙深处,到北斗卫星指引万里航程,这套看似简单的旋转飞轮系统,承载着人类探索太空的精准梦想。随着材料科学与控制算法的进步,未来的反作用轮将更轻、更强、更智能,继续书写人类航天器的姿态传奇。
相关文章:

卫星的“太空陀螺”:反作用轮如何精准控制姿态?
卫星的“太空陀螺”:反作用轮如何精准控制姿态? 在距地面500公里的轨道上,一颗遥感卫星正以7.8km/s的速度飞越目标区域。此时星载计算机发出指令:“滚转15并对准目标点”。短短数秒后,数吨重的卫星如同被无形之手推动般…...
proteus新建工程
1 点击新建工程 2 输入项目名,选择工程文件夹 3 下一步 4 不创建pcb 5 直接下一步 6 点击完成 7 创建完毕...

缓存击穿 缓存穿透 缓存雪崩
缓存击穿 缓存穿透 缓存雪崩 在日常开发中,我们经常会在后端引入 Redis 缓存来减轻数据库压力、提高访问性能。本文将逐点介绍 Redis 缓存常见问题及解决策略。 缓存穿透 问题描述: 缓存穿透指的是客户端请求的数据,在缓存中和数据库中都不…...
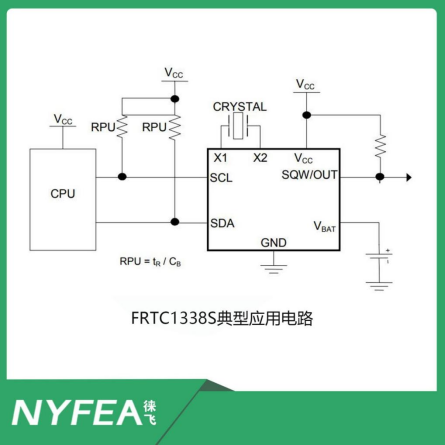
RTC实时时钟DS1338Z-33/PT7C433833WEX国产替代FRTC1338S
FRTC1338S是NYFEA徕飞公司推出的一种高性能的实时时钟芯片,它采用了SOP8封装技术,这种技术因其紧凑的尺寸和出色的性能而被广泛应用于各类电子设备中。 FRTC1338S串行实时时钟(RTC)是一种低功耗的全二进制编码十进制(BCD)时钟/日历外加56字节的非易失性…...

Redis命令使用
Redis是以键值对进行数据存储的,添加数据和查找数据最常用的2个指令就是set和get。 set:set指令用来添加数据。把key和value存储进去。get:get指令用来查找相应的键所对应的值。根据key来取value。 首先,我们先进入到redis客户端…...
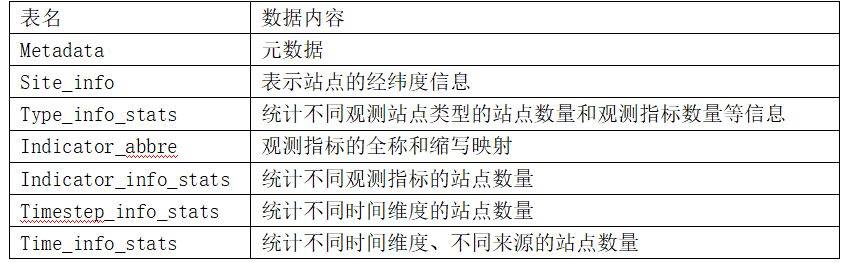
【免费数据】1980-2022年中国2384个站点的水质数据
水,是生命之源,关乎着地球上每一个生物的生存与发展。健康的水生生态系统维持着整个水生态的平衡与活力;更是确保人类能持续获得清洁水源的重要保障。水质数据在水质研究、海洋生物量测算以及生物多样性评估等诸多关键领域都扮演着举足轻重的…...

Java基础 Day28 完结篇
一、方法引用 对 Lambda 表达式的进一步简化 方法引用使用一对冒号 :: Tips:静态方法用类名加双冒号,非静态方法用对象名加双冒号 通过方法的名字来指向一个方法 参数可推导即可省略 可以使语言的构造更紧凑简洁,减少冗余代码 二、单元…...

小红薯商品搜索详情分析与实现
前言 小红书作为国内知名的社交电商平台,拥有丰富的商品数据和用户评价信息。对于数据分析师、产品经理或电商从业者来说,能够获取小红书的商品数据具有重要的商业价值。本文将详细介绍如何通过逆向工程实现小红书商品搜索API的调用。 免责声明:本文仅用于技术学习和研究目…...
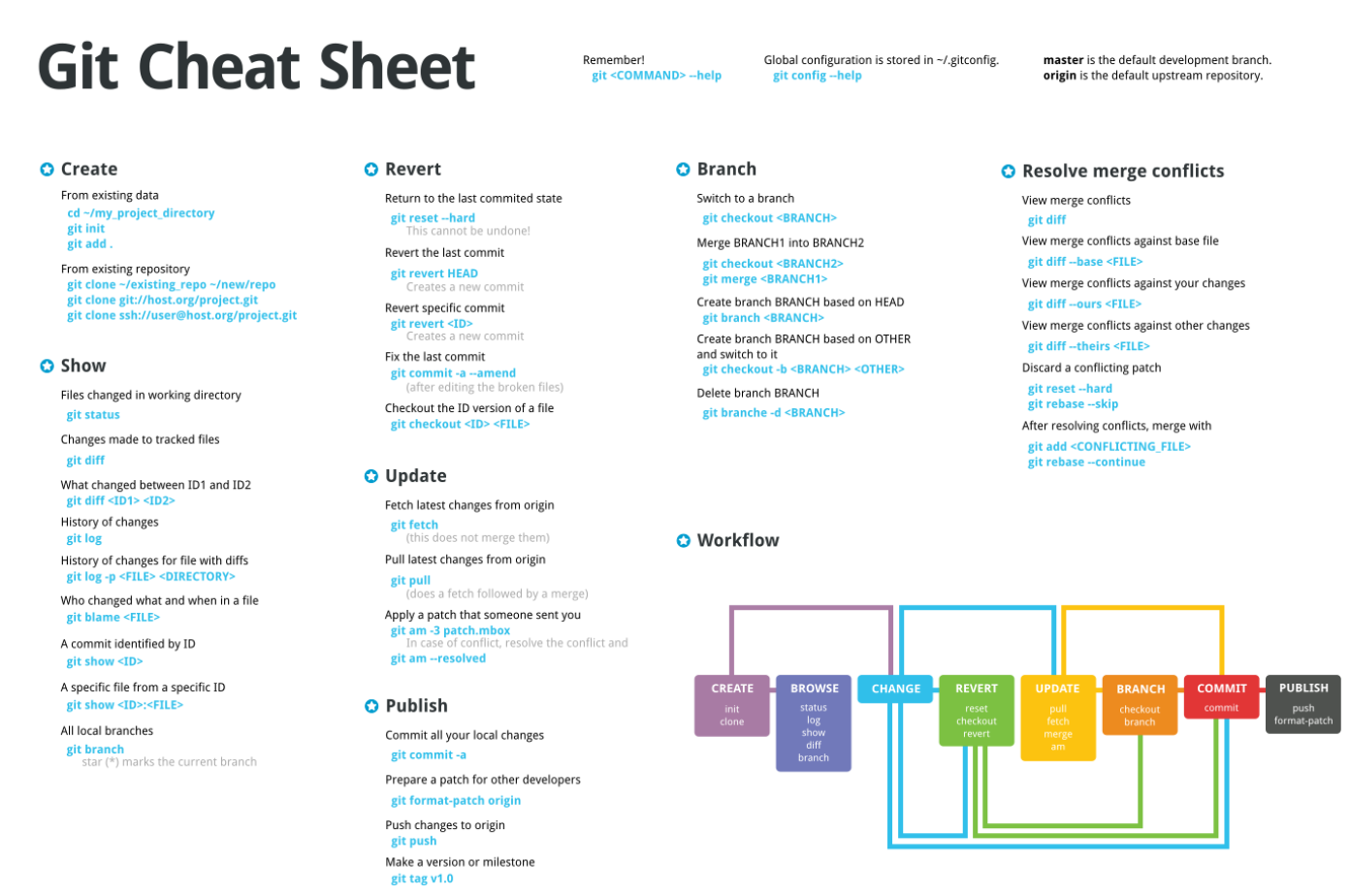
Git 极简使用指南
Git 是一个强大的分布式版本控制系统,但入门只需要掌握几个核心概念和命令。本指南旨在帮助你快速上手,处理日常开发中最常见的 80% 的场景。 核心概念 仓库 (Repository / Repo): 你的项目文件夹,包含了项目的所有文件和完整的历史记录。…...
力扣刷题Day 69:搜索二维矩阵(74)
1.题目描述 2.思路 首先判断target是否有可能在矩阵的某一行里,没可能直接返回False,有可能就在这一行里二分查找。 3.代码(Python3) class Solution:def searchMatrix(self, matrix: List[List[int]], target: int) -> boo…...

c#压缩与解压缩-SharpCompress
SharpCompress SharpCompress 是一个开源项目库,能够处理文件。c#库对于压缩已经有很多,可以随意选择,看了SharpCompress感觉比较简洁,还是介绍给大家。 项目地址: sharpcompress 项目使用 引入nuget包࿱…...

Neo4j 安全深度解析:原理、技术与最佳实践
在当今数据驱动的世界中,图数据库承载着关键的关系信息,其安全性至关重要。Neo4j 提供了一套多层次、纵深防御的安全体系。 Neo4j 的安全体系提供了从认证授权到数据加密、审计追溯的完整解决方案。安全不是单一功能而是一种持续状态,其有效…...

MySQL指令个人笔记
MySQL学习,SQL语言笔记 一、MySQL 1.1 启动、停止 启动 net start mysql83停止 net stop mysql831.2 连接、断开 连接 mysql -h localhost -P 3306 -u root -p断开 exit或者ctrlc 二、DDL 2.1 库管理 2.1.1 直接创建库 使用默认字符集和排序方式…...

2022年 国内税务年鉴PDF电子版Excel
2022年 国内税务年鉴PDF电子版Excelhttps://download.csdn.net/download/2401_84585615/89784658 https://download.csdn.net/download/2401_84585615/89784658 2022年国内税务年鉴是对中国税收政策、税制改革和税务管理实践的全面总结。这份年鉴详细记录了中国税收系统的整体状…...
基于Java的OPCDA采集中间件
1.软件功能及技术特点简介: 软件功能及技术特点简介: OPCDA是基于Java语言开发的OPC client(OPC客户端)跨平台中间件软件,他支持OPC SERVER的OPC DA1.0/2.0/3.0。OPCDA实时采集数据(包括实时数据、报警数…...

基于PyQt5的相机手动标定工具:原理、实现与应用
基于PyQt5的相机手动标定工具:原理、实现与应用 一、背景介绍二、功能详解与实现原理2.1 图像加载与预处理2.2 交互式透视调整2.3 透视变换数学原理2.4 图像拼接核心技术2.5 用户界面优化细节三、完整使用流程四、应用场景实例五、技术优势分析六、代码七、总结一、背景介绍 …...

vue2 项目中 npm run dev 运行98% after emitting CopyPlugin 卡死
今天在运行项目时,发现如下问题: 开始以为是node_modules依赖的问题,于是重新 npm install,重启项目后还是未解决。 在网上找了一圈发现有人说是 require引入图片地址没有写。在我的项目中排查没有这个问题,最后发现某…...
JavaScript 性能优化实战:从原理到框架的全栈优化指南
在 Web 应用复杂度指数级增长的今天,JavaScript 性能优化已成为衡量前端工程质量的核心指标。本文将结合现代浏览器引擎特性与一线大厂实践经验,构建从基础原理到框架定制的完整优化体系,助你打造高性能 Web 应用。 一、性能优化基础&#x…...
2025年- H61-Lc169--74.搜索二维矩阵(二分查找)--Java版
1.题目描述 2.思路 方法一: 定义其实坐标,右上角的元素(0,n-1)。进入while循环(注意边界条件,行数小于m,列数要>0)从右上角开始开始向左遍历(比当…...

微服务商城-用户微服务
数据表 用户表 CREATE DATABASE user; USE user;CREATE TABLE user (id bigint(20) UNSIGNED NOT NULL AUTO_INCREMENT COMMENT 用户ID,username varchar(50) NOT NULL DEFAULT COMMENT 用户名,password varchar(50) NOT NULL DEFAULT COMMENT 用户密码,MD5加密…...

数学复习笔记 26
5.25:这题还是有点难度的。主要是出现了新的知识点,我现在还没有那么熟悉这个新的知识点。这块就是,假设一个矩阵可以写成一个列向量乘以一个行向量的形式,这两个向量都是非零向量,那么这个矩阵的秩等于一。这个的原理…...

创建型-设计模式
文章目录 单例模式工厂模式建造者模式原型模式 单例模式 单例模式有饿汉式 和 懒汉式。这个我觉得无需多言,每个学过Java的都知道。 1.单例的使用:我一般就是用饿汉式,因为App开发的开发一般数据处理并不复杂,所以直接使用饿汉式…...

移动AI神器GPT Mobile:多模型自由切换
GPT Mobile是什么 GPT Mobile是一款开源的本地移动部署AI工具,主要用于安卓设备。以下是其相关介绍: 功能特点 多模型交互:支持与多个大型语言模型(LLM)同时进行对话,用户导入相应的API密钥,就可连接OpenAI、Anthropic、Google、Ollama等平台,还能根据需求自由切换不同…...

【黄金评论】美元走强压制金价:基于NLP政策因子与ARIMA-GARCH的联动效应解析
一、基本面:多因子模型解析黄金承压逻辑 1. 政策冲击因子驱动美元强势 通过NLP模型对关税政策文本进行情感分析,构建政策不确定性指数(PUI)达89.3,触发美元避险需求溢价。DSGE模型模拟显示,钢铁关税上调至…...

ubutu修改网关
修改Netplan配置以指定静态网关 1. 编辑Netplan配置文件 打开Netplan配置文件(通常位于 /etc/netplan/01-netcfg.yaml 或类似路径): sudo nano /etc/netplan/01-netcfg.yaml 2. 修改配置文件 在DHCP配置基础上,添加静态网关和…...
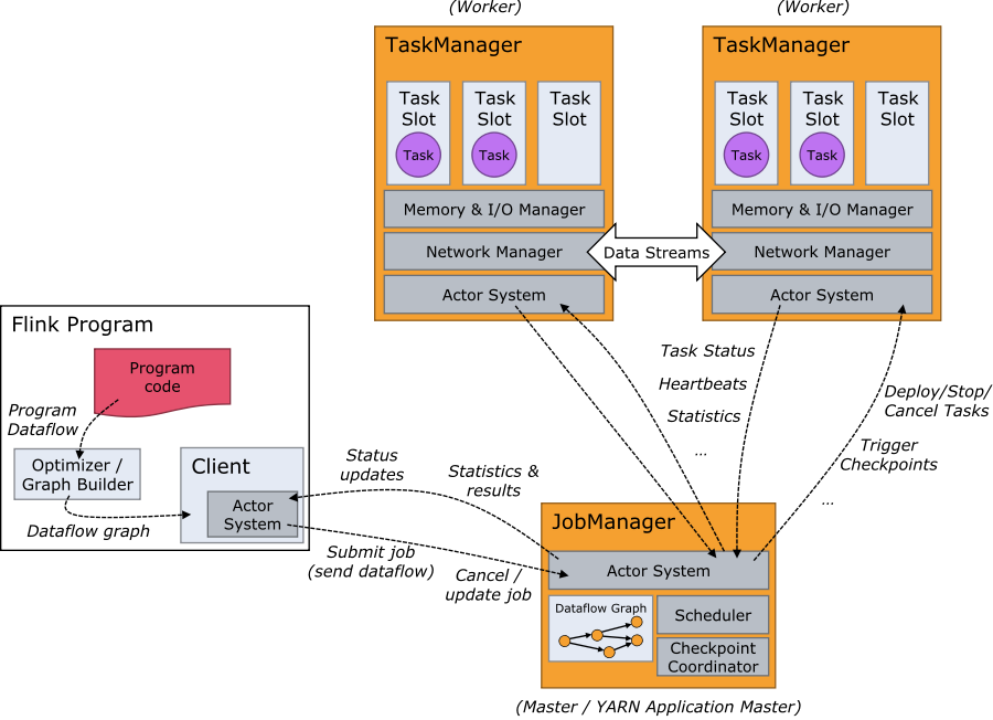
Flink进阶之路:解锁大数据处理新境界
目录 一、Flink 基础回顾 二、Flink 进阶知识深入 2.1 数据类型与序列化 2.2 双流 Join 操作 2.3 复杂事件处理(CEP) 2.4 状态管理与优化 三、Flink 在实际场景中的应用 3.1 实时智能推荐 3.2 实时欺诈检测 3.3 实时数仓与 ETL 四、Flink 性能…...
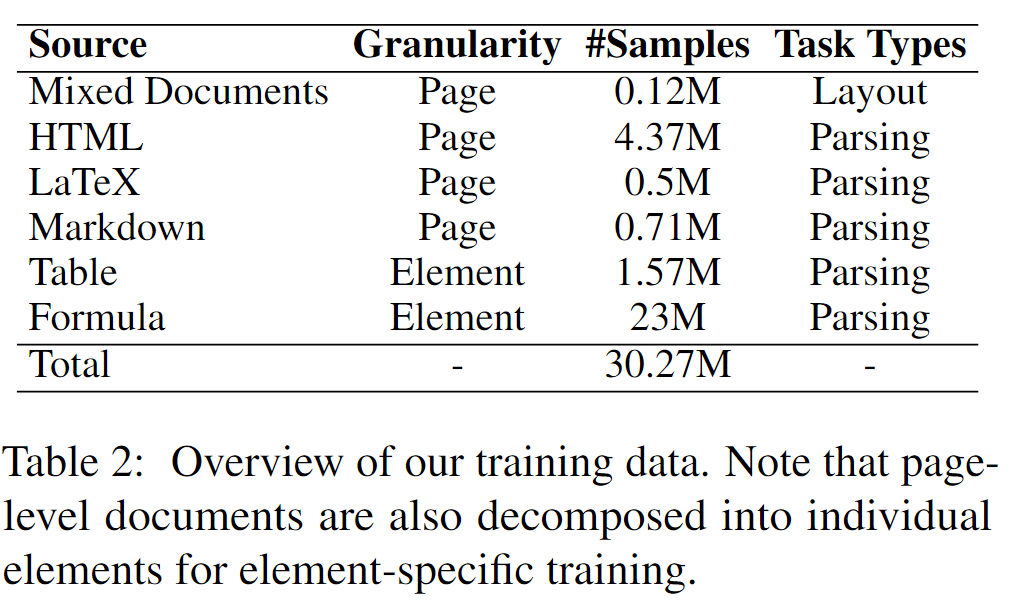
【论文阅读】Dolphin: Document Image Parsing via Heterogeneous Anchor Prompting
Paper:https://arxiv.org/abs/2505.14059 Source code: https://github.com/bytedance/Dolphin 作者机构:字节跳动 背景 业务场景 企业数据大多数都以文本、图片、扫描件、电子表格、在线文档、邮件等文档的形式存在,例如:PDF文…...

谷歌地图免费下载手机版
软件标签: 谷歌地图 谷歌卫星高清地图 下载链接:夸克网盘分享 手机地图 谷歌地图免费下载(google maps)是谷歌公司打造的手机高清电子地图。2024谷歌地图官方中文版能够直观的表达出世界各地的地点,在地图中能够清晰的了解到自身的定位,让…...
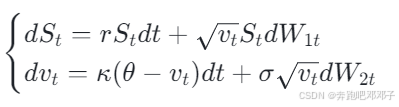
DeepSeek 赋能金融衍生品:定价与风险管理的智能革命
目录 一、引言1.1 金融衍生品市场发展现状1.2 DeepSeek 的技术特点和优势1.3 研究目的和意义 二、金融衍生品定价与风险管理基础2.1 金融衍生品定价常用方法2.2 金融风险管理主要策略 三、DeepSeek 在金融衍生品定价中的应用3.1 DeepSeek 助力定价模型构建3.2 案例分析…...

SpringBoot-15-多表查询之多对多查询可选中间表
文章目录 1 mysql数据库1.1 role角色表1.2 user用户表1.3 user_role中间表2 实体类2.1 Role.java2.2 User.java3 mapper3.1 RoleMapper.java3.2 UserMapper.java4 xml4.1 RoleMapper.xml4.2 UserMapper.xml5 UserController.java6 测试7 参考附录多对多查询,一个用户可以有多个…...