在MATLAB中使用自定义的ROS2消息
简明结论:
- 无论ROS2节点和MATLAB运行在哪,MATLAB本机都必须拥有自定义消息源码并本地用ros2genmsg生成,才能在Simulink里订阅这些消息。
- 只要你想让MATLAB或Simulink能识别自定义消息,必须把消息包源码(.msg等)拷到本机指定目录,然后运行ros2genmsg。
- MATLAB和Simulink会在之后的所有ROS2通信、仿真、代码生成中支持这些类型。
- 包结构和ROS2规范一致就行,多个包可以一起处理。
- 只要你的自定义消息包源码在本地,结构正确,就能通过ros2genmsg一键导入MATLAB/Simulink,并且能和内置消息一样创建、发布、订阅和回调。
- 支持多包批量导入和自动依赖处理,导入后所有操作与内置消息完全一致。
- 如果更新消息定义,只需重新运行一次ros2genmsg即可。
问题:
- 要拷贝到安装有MATLAB的Windows本机的包仅仅是包含有.msg格式文件的那个msg文件夹还是包含有这个msg的功能包?(比如pid_interfaces功能包,其中不仅有msg文件夹,还有include文件夹、CMakeLists.txt还有package.xml文件),,还是说需要导入的是经过colcon build后的install文件夹里的某个文件夹? 】
- 第一步完成以后,按照教程,需要执行ros2genmsg(folderpath)来注册发这个自定义消息,那么这个代码只需要执行一次,还是每次重新打开MATLAB以后都需要重新执行?
- 我想把第一步的拷贝的文件放在F:\simulink_project\custom_msgs路径下,folderpath = “F:\simulink_project\custom_msgs”; 是不是就可以了?
- folderpath 并不需要指定到具体的.msg文件是么?
你的问题非常具有代表性,下面分点详细回答:
- 到底要拷贝什么内容?是只要 msg 文件夹,还是整个功能包,还是 build/install 文件夹?
一定要拷贝整个功能包的源码目录,而不是只拷msg文件夹,也不是build/install生成的文件夹!
- 需要的内容是:
你的自定义消息功能包目录(例如pid_interfaces),包括:- msg 文件夹(放 .msg 文件)
- 如果有,srv 文件夹(放 .srv 文件)
- 如果有,action 文件夹(放 .action 文件)
- CMakeLists.txt
- package.xml
- (如有)include 文件夹等其它源码结构
不需要拷贝colcon build后生成的 build、install 或 log 文件夹!
不需要单独只拷msg文件夹!
必须是完整的功能包源码目录结构,MATLAB用源码生成自己的消息解析代码,不依赖已编译好的内容。
- ros2genmsg(folderpath) 只需要执行一次还是每次都要执行?
- 只需要在消息定义发生变化时执行一次。正常情况下:
- 第一次导入新消息包时,执行一次;
- 以后只要 .msg(或srv/action)有增删改,再执行一次覆盖旧的;
- 每次重启MATLAB不用再执行,只要不改动消息定义即可。
- 只有消息定义变动才需要重新执行,否则导入的类型一直可用。
- 路径设置 folderpath = “F:\simulink_project\custom_msgs”; 这样可以吗?
完全可以!
只要你把所有功能包源码都放在F:\simulink_project\custom_msgs\下,比如:
F:\simulink_project\custom_msgs\pid_interfaces
F:\simulink_project\custom_msgs\other_custom_pkg
你的folderpath就设置成:
folderpath = “F:\simulink_project\custom_msgs”;
ros2genmsg(folderpath)
即可,无需到具体包名或msg文件夹。
- folderpath 不需要指向具体的 .msg 文件对吗?
对!不需要指定到 .msg 文件本身。
folderpath 只需指定到包含功能包源码的“父目录”。
MATLAB 会自动递归扫描这个目录下的所有包、所有msg/srv/action定义。
比如你的目录结构是:
F:\simulink_project\custom_msgs
└─ pid_interfaces
├─ msg
├─ CMakeLists.txt
└─ package.xml
那么 folderpath 就是 F:\simulink_project\custom_msgs,不要指到msg文件夹或单个msg文件!
结论小结:
- 一定是整个功能包源码目录,不是只要msg文件夹,也不是install/build;
- ros2genmsg只要消息变动时执行一次即可,非每次启动必需;
- folderpath指到功能包的“上一级目录”即可,不要指到msg或单个文件。
MATLAB与python的版本对应关系:
https://www.mathworks.com/support/requirements/python-compatibility.html?s_tid=srchtitle_site_search_1_python+compatibility
MATLAB2024b和python3.12是对应的。
但是ROS toolbox和MATLAB自己的python解释器配置是分离的。
ROS toolbox 兼容的python版本也和MATLAB兼容的python版本不太一样。具体信息见下:
https://www.mathworks.com/help/releases/R2024b/ros/gs/ros-system-requirements.html
在使用ros2genmsg(folderpath)之前,需要先配置ROS toolbox的python解释器版本:
[图片]
如果之后执行ros2genmsg(folderpath)报错:
ros2genmsg(folderpath) Identifying message files in folder ‘F:/simulink_project/custom_msgs’…Validating message files in folder ‘F:/simulink_project/custom_msgs’…Done. Done. [0/1] Generating MATLAB interfaces for custom message packages… 0%Error using ros.internal.ROSProjectBuilder (line 517) The directory ‘C:\Users\qwv\source’ already exists, will cause the build in directory ‘F:\simulink_project\custom_msgs\matlab_msg_gen\win64’ to fail. Remove or rename ‘C:\Users\qwv\source’, and retry the command. Error in ros.ros2.internal.ColconBuilder (line 26) h@ros.internal.ROSProjectBuilder(varargin{:}); ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^ Error in ros2genmsg (line 278) builder = ros.ros2.internal.ColconBuilder(genDir, pkgInfos{iPkg}, UseNinja=useNinja, SuppressOutput=suppressOutput); ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
报错信息解析
你的这个错误信息非常明确:
The directory ‘C:\Users\qwv\source’ already exists, will cause the build in directory ‘F:\simulink_project\custom_msgs\matlab_msg_gen\win64’ to fail. Remove or rename ‘C:\Users\qwv\source’, and retry the command.
【问题解析】
- MATLAB 的 ros2genmsg 工具在生成消息接口时,会自动建立临时工程和构建目录。
- 它期望 C:\Users\qwv\source 这个路径是用来临时存放源码和构建产物的。
- 但发现这个路径已经存在(可能被你或别的软件用过,或有残留文件),为避免覆盖或混乱,MATLAB直接中断执行,要求你先手动处理。
【如何解决】
- 彻底删除或重命名该目录
- 用资源管理器(文件夹窗口)打开 C:\Users\qwv\,找到 source 文件夹。
- 如果你不需要这里的数据,直接删掉 source 文件夹。
- 如果里面有重要文件(比如你自己的代码),可以改名如 source_backup。
- 确认删除后,重启MATLAB(保险做法)
- 再次运行 ros2genmsg(folderpath)
【补充说明】
- 这个问题和你的 Python、消息内容、路径设置没有直接关系,只与MATLAB的消息生成缓存/临时目录相关。
- 通常是上次编译异常中断、或者有其它软件占用该目录,MATLAB无法安全覆盖,才会报这个错。
- 一般清理掉这个目录就能正常生成,不会丢失任何你自己的ROS2数据。
【简要结论】
只要删除或重命名 C:\Users\qwv\source 文件夹,再重试 ros2genmsg(folderpath) 即可解决问题。
成功提示
![[图片]](https://i-blog.csdnimg.cn/direct/ae652ec4c7994a09b859f42df0ecb0a9.png)
相关文章:
在MATLAB中使用自定义的ROS2消息
简明结论: 无论ROS2节点和MATLAB运行在哪,MATLAB本机都必须拥有自定义消息源码并本地用ros2genmsg生成,才能在Simulink里订阅这些消息。只要你想让MATLAB或Simulink能识别自定义消息,必须把消息包源码(.msg等)拷到本机指定目录&a…...

使用C/C++和OpenCV实现图像拼接
使用 C 和 OpenCV 实现图像拼接 本文将详细介绍如何利用 OpenCV 库,在 C 环境中实现图像拼接。图像拼接技术可以将多张具有重叠区域的图像合成为一张高分辨率的全景图。OpenCV 提供了一个功能强大的 Stitcher 类,它封装了从特征点检测、匹配到图像融合的…...

神经网络-Day46
目录 一、 什么是注意力二、 特征图的提取2.1 简单CNN的训练2.2 特征图可视化 三、通道注意力3.1 通道注意力的定义3.2 模型的重新定义(通道注意力的插入) 一、 什么是注意力 注意力机制,本质从onehot-elmo-selfattention-encoder-bert这就是…...

Ubuntu中常用的网络命令指南
Ubuntu中常用的网络命令指南 在Ubuntu系统中,网络管理是日常运维和故障排查的核心技能。 🛠️ 基础网络诊断 ping - 测试网络连通性 ping google.com # 持续测试 ping -c 4 google.com # 发送4个包后停止traceroute / tracepath - 追踪数据包路径 …...

JVM——如何打造一个类加载器?
引入 在Java应用程序的生命周期中,类加载器扮演着至关重要的角色。它是Java运行时环境的核心组件之一,负责在需要时动态加载类文件到JVM中。理解类加载器的工作原理以及如何自定义类加载器,不仅可以帮助我们更好地管理应用程序的类加载过程&…...
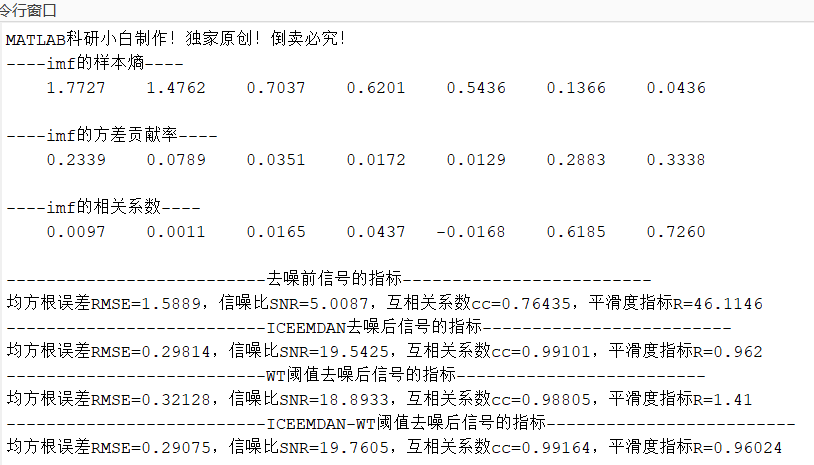
【MATLAB去噪算法】基于ICEEMDAN联合小波阈值去噪算法
ICEEMDAN联合小波阈值去噪算法相关文献 (注:目前相关论文较少,应用该套代码可发直接一些水刊) 一、CEEMDAN的局限性 模式残留噪声问题:原始CEEMDAN在计算每个IMF时直接对噪声扰动的信号进行模态分解并平均。 后果&a…...

c++ Base58编码解码
Base58 字符集 Base58 使用 58 个字符进行编码,字符集为:123456789ABCDEFGHJKLMNPQRSTUVWXYZabcdefghijkmnopqrstuvwxyz。注意:0(零)、O(大写字母O)、I(大写字母I)和 l&a…...

证券交易柜台系统解析与LinkCounter解决方案开发实践
第一章 证券交易柜台系统基础解析 1.1 定义与行业定位 证券交易柜台系统(Trading Counter System)是券商经纪业务的核心支撑平台,承担投资者指令传输、风险控制、清算结算等职能。根据中国证监会《证券期货业网络信息安全管理办法》要求&am…...
XXTEA,XTEA与TEA
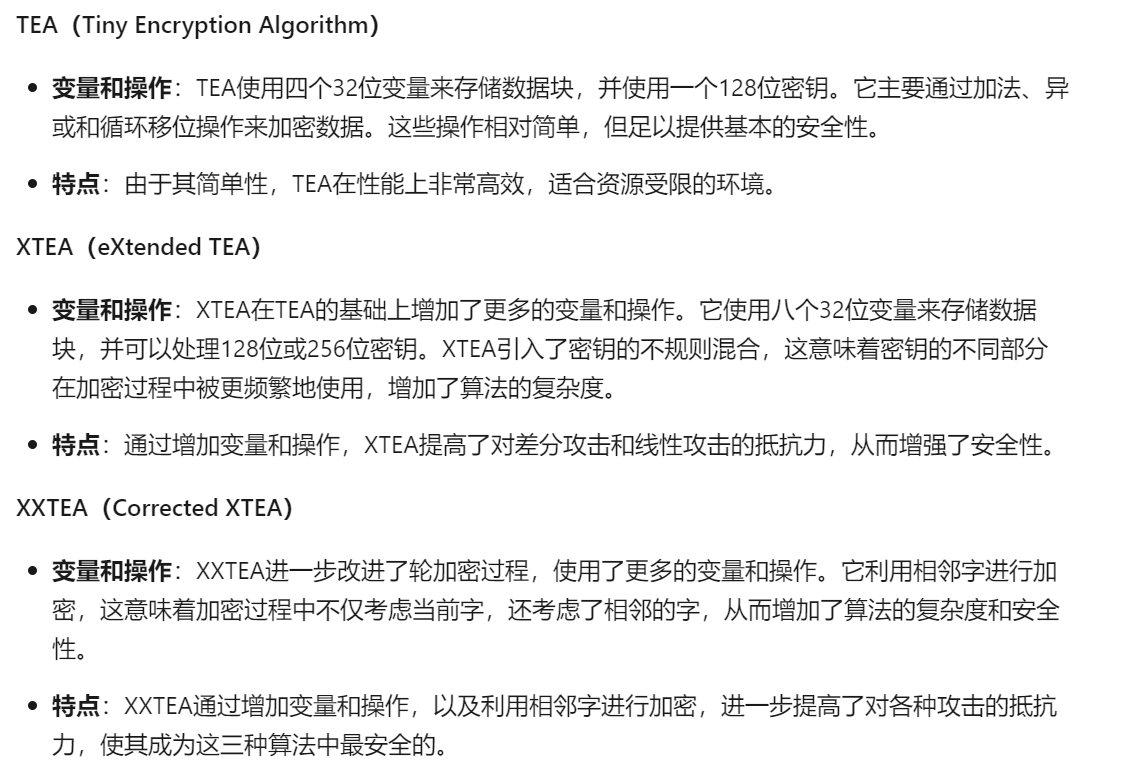
TEA、XTEA和XXTEA都是分组加密算法,它们在设计、安全性、性能等方面存在显著区别。以下是它们的主要区别: 密钥长度 TEA:使用128位密钥。 XTEA:通常使用128位或256位密钥。 XXTEA:密钥长度更灵活,可以使用任…...
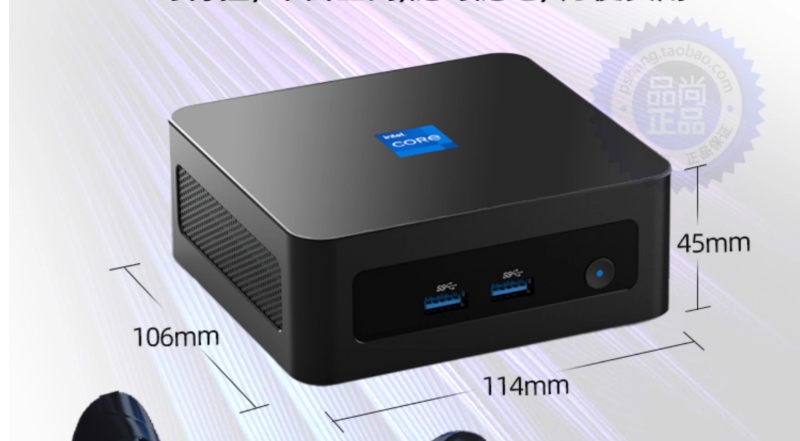
机器人玩转之---嵌入式开发板基础知识到实战选型指南(包含ORIN、RDK X5、Raspberry pi、RK系列等)
1. 基础知识讲解 1.1 什么是嵌入式开发板? 嵌入式开发板是一种专门设计用于嵌入式系统开发的硬件平台,它集成了微处理器、内存、存储、输入输出接口等核心组件于单块印刷电路板上。与传统的PC不同,嵌入式开发板具有体积小、功耗低、成本适中…...

腾讯云国际版和国内版账户通用吗?一样吗?为什么?
在当今全球化的数字化时代,云计算服务成为众多企业和个人拓展业务、存储数据的重要选择。腾讯云作为国内领先的云服务提供商,其国际版和国内版备受关注。那么,腾讯云国际版和国内版账户是否通用?它们究竟一样吗?背后又…...
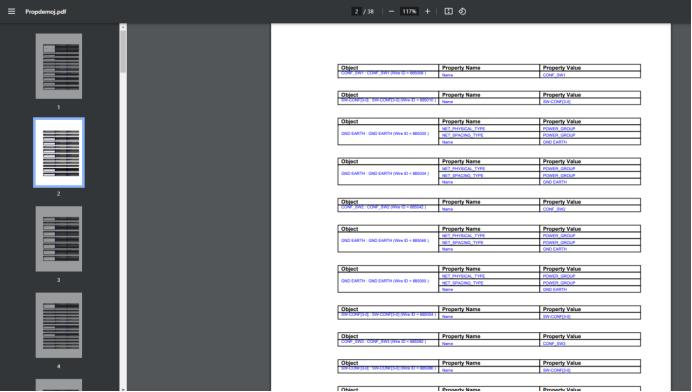
OrCAD X Capture CIS设计小诀窍系列第二季--03.如何在Capture中输出带有目录和元器件信息的PDF
背景介绍:我们在进行原理图设计时,经常需要输出PDF来查看或评审,但通过”Print”功能导出的PDF较为简单,只能查看设计视图;而通过使用Ghostscript软件可以输出带有目录和元器件信息的PDF,让设计师可以直接在…...
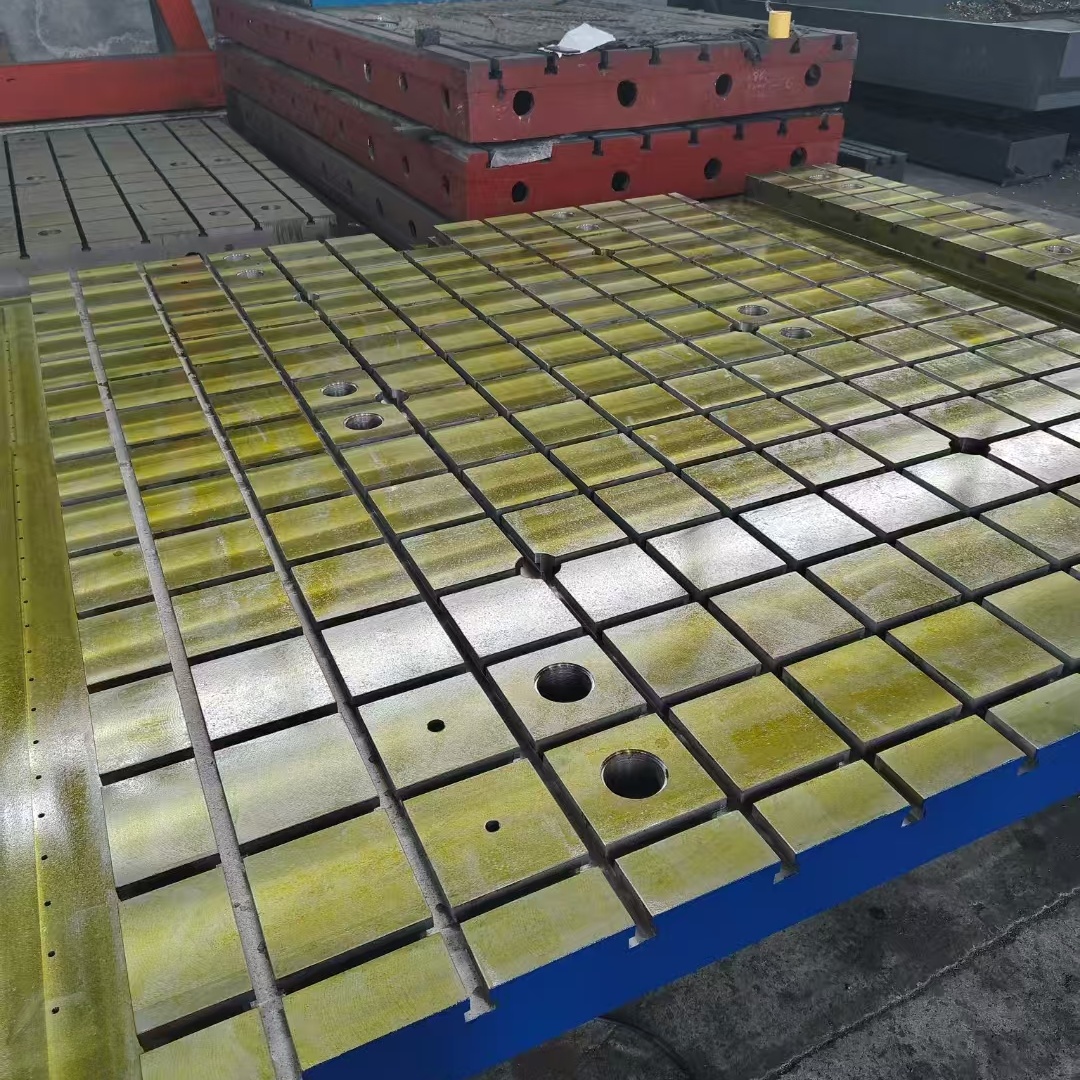
汽车的安全性能测试:试验台铁地板的重要性
汽车的安全性能测试是非常重要的,其中试验台铁地板的设计和材料选择起着至关重要的作用。试验台铁地板是指在进行汽车碰撞、侧翻等试验时,用于支撑汽车底部和提供稳定支撑的重要部件。 在进行汽车碰撞试验时,试验台铁地板的设计和材料需要具…...

Lua和JS的垃圾回收机制
Lua 和 JavaScript 都采用了 自动垃圾回收机制(GC) 来管理内存,开发者无需手动释放内存,但它们的 实现机制和行为策略不同。下面我们从原理、策略、优缺点等方面来详细对比: 🔶 1. 基本原理对比 特性LuaJa…...

实践指南:从零开始搭建RAG驱动的智能问答系统
LLM 赋能的最强大的应用之一是复杂的问答 (Q&A) 聊天机器人。这些是可以回答关于特定来源信息问题的应用程序。这些应用程序使用一种称为检索增强生成的技术,或 RAG。本文将展示如何基于 LangChain 构建一个简单的基于非结构化数据文本数据源的问答应用程序。 温…...

边缘计算服务器
边缘计算服务器的核心要点解析,综合技术架构、应用场景与部署方案: 一、核心定义与技术特性 本质定位 部署在网络边缘侧的专用计算设备(如工厂车间、智慧路灯等),直接处理终端设备(传感器、摄像头等…...

矩阵的偏导数
设 X ( x i j ) m n X (x_{ij})_{m \times n} X(xij)mn,函数 f ( X ) f ( x 11 , x 12 , … , x 1 n , x 21 , … , x m n ) f(X) f(x_{11}, x_{12}, \ldots, x_{1n}, x_{21}, \ldots, x_{mn}) f(X)f(x11,x12,…,x1n,x21,…,xmn) 是一个 m n…...

第R9周:阿尔茨海默病诊断(优化特征选择版)
文章目录 1. 导入数据2. 数据处理2.1 患病占比2.2 相关性分析2.3 年龄与患病探究 3. 特征选择4. 构建数据集4.1 数据集划分与标准化4.2 构建加载 5. 构建模型6. 模型训练6.1 构建训练函数6.2 构建测试函数6.3 设置超参数 7. 模型训练8. 模型评估8.1 结果图 8.2 混淆矩阵9. 总结…...
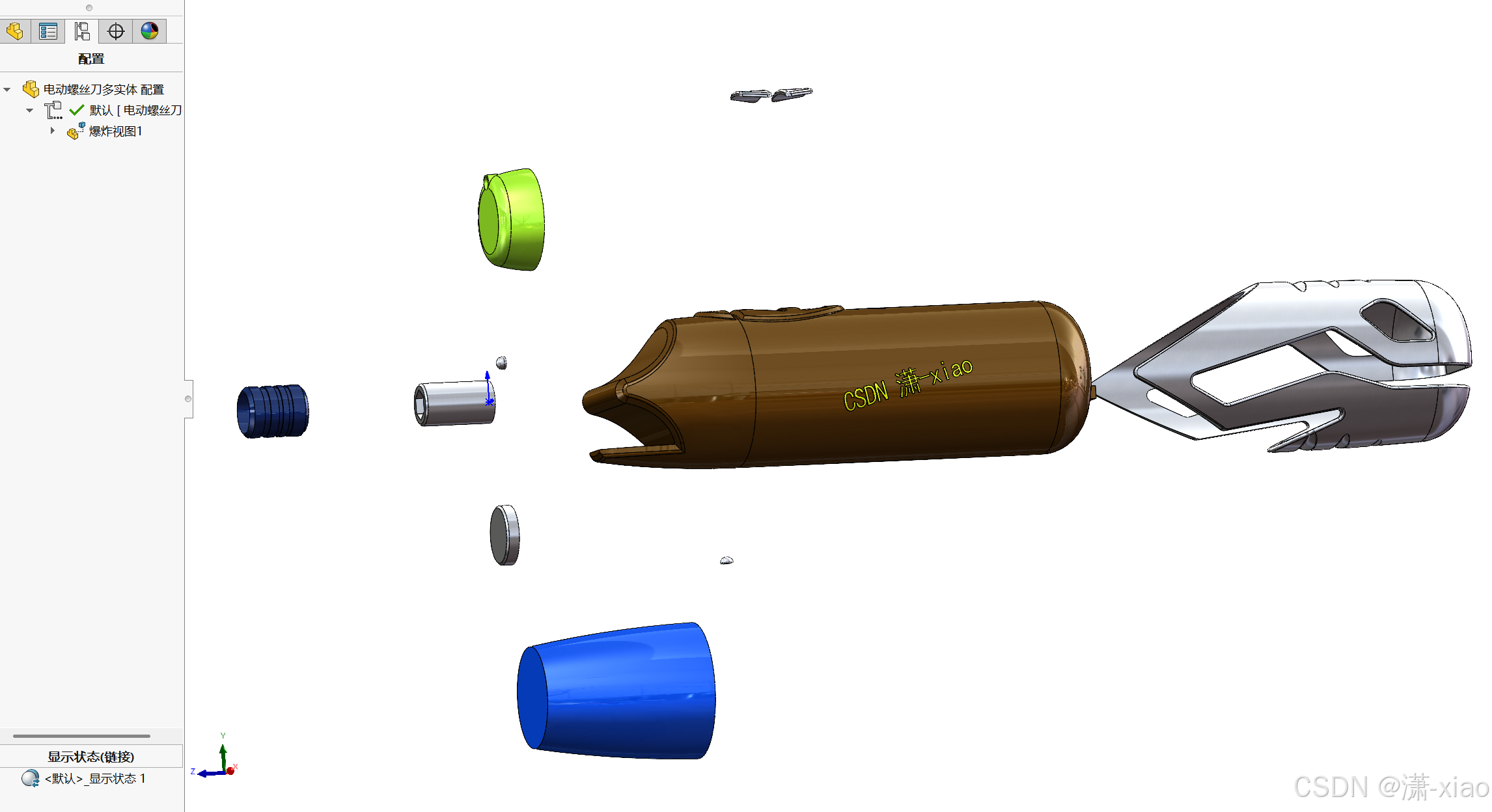
电动螺丝刀-多实体拆图建模案例
多实体建模要注意下面两点: 多实体建模的合并结果一定要谨慎在实际工作中多实体建模是一个非常好的思路,先做产品的整体设计,再将个体零件导出去做局部细节设计 电动螺丝刀模型动图展示 爆炸视图动图展示 案例素材点击此处获取 建模步骤 1. …...

当丰收季遇上超导磁测量:粮食产业的科技新征程
麦浪藏光阴,心田种丰年!又到了一年中最令人心潮澎湃的粮食丰收季。金色的麦浪随风翻滚,沉甸甸的稻穗谦逊地低垂着,处处洋溢着丰收的喜悦。粮食产业,无疑是国家发展的根基与命脉,是民生稳定的压舱石。在现代…...

电子电气架构 --- 什么是功能架构?
我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。 老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师: 做到欲望极简,了解自己的真实欲望,不受外在潮流的影响,不盲从,不跟风。把自己的精力全部用在自己。一是去掉多余,凡事找规律,基础是诚信;二是…...

Android四大组件通讯指南:Kotlin版组件茶话会
某日,Android王国举办Kotlin主题派对。Activity穿着Jetpack Compose定制礼服,Service戴着协程手表,BroadcastReceiver拿着Flow喇叭,ContentProvider抱着Room数据库入场。它们正愁如何交流,Intent举着"邮差"牌…...
材质(Materials))
C++.OpenGL (11/64)材质(Materials)
材质(Materials) 真实感材质系统 #mermaid-svg-NjBjrmlcpHupHCFQ {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg-NjBjrmlcpHupHCFQ .error-icon{fill:#552222;}#mermaid-svg-NjBjrmlcpHupHCFQ .error-text{fill:…...

AudioRelay 0.27.5 手机充当电脑音响
—————【下 载 地 址】——————— 【本章下载一】:https://pan.xunlei.com/s/VOS4MvfPxrnfS2Zu_YS4egykA1?pwdi2we# 【本章下载二】:https://pan.xunlei.com/s/VOS4MvfPxrnfS2Zu_YS4egykA1?pwdi2we# 【百款黑科技】:https://uc…...

会计 - 合并1- 业务、控制、合并日
一、业务 1.1 业务的定义以及构成要素 业务,是指企业内部某些生产经营活动或资产的组合,该组合一般具有投入、加工处理过程和产出能力,能够独立计算其成本费用或所产生的收入。 (1)投入,指原材料、人工、必要的生产技术等无形资产以及构成产出能力的机器设备等其他长期资…...

前端项目eslint配置选项详细解析
文章目录 1. 前言2、错误级别3、常用规则4、目前项目使用的.eslintrc.js 1. 前言 ESLint 是一个可配置的 JavaScript 代码检查工具,旨在帮助开发者发现并修复代码中的潜在问题,包括语法错误、逻辑错误以及风格不一致等问题。以下是其核心功能和特点…...

NVIDIA Dynamo:数据中心规模的分布式推理服务框架深度解析
NVIDIA Dynamo:数据中心规模的分布式推理服务框架深度解析 摘要 NVIDIA Dynamo是一个革命性的高吞吐量、低延迟推理框架,专为在多节点分布式环境中服务生成式AI和推理模型而设计。本文将深入分析Dynamo的架构设计、核心特性、代码实现以及实际应用示例&…...

第十三节:第四部分:集合框架:HashMap、LinkedHashMap、TreeMap
Map集合体系 HashMap集合的底层原理 HashMap集合底层是基于哈希表实现的 LinkedHashMap集合的底层原理 TreeMap集合的底层原理 代码: Student类 package com.itheima.day26_Map_impl;import java.util.Objects;public class Student implements Comparable<Stu…...
Spring AI之RAG入门
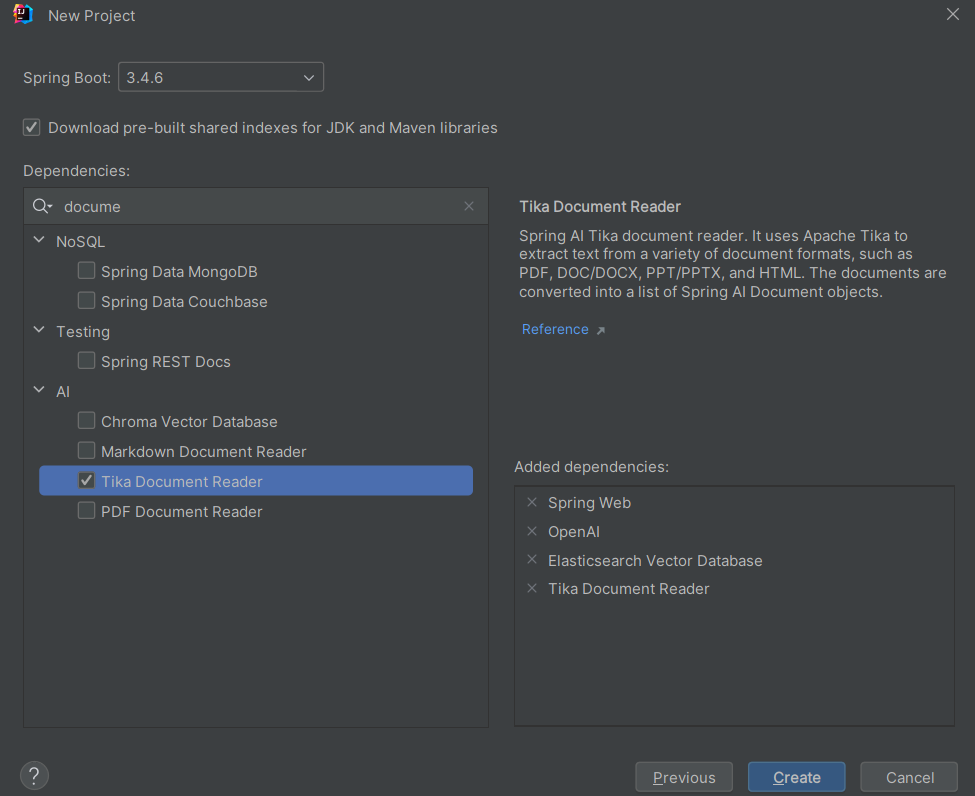
目录 1. 什么是RAG 2. RAG典型应用场景 3. RAG核心流程 3.1. 检索阶段 3.2. 生成阶段 4. 使用Spring AI实现RAG 4.1. 创建项目 4.2. 配置application.yml 4.3. 安装ElasticSearch和Kibana 4.3.1. 安装并启动ElasticSearch 4.3.2. 验证ElasticSearch是否启动成功 …...
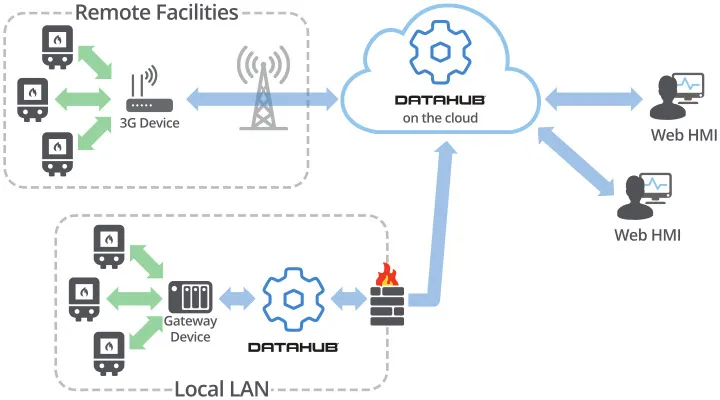
应用案例 | 设备分布广, 现场维护难? 宏集Cogent DataHub助力分布式锅炉远程运维, 让现场变“透明”
在日本,能源利用与环保问题再次成为社会关注的焦点。越来越多的工业用户开始寻求更高效、可持续的方式来运营设备、管理能源。而作为一家专注于节能与自动化系统集成的企业,日本大阪的TESS工程公司给出了一个值得借鉴的答案。 01 锅炉远程监控难题如何破…...