DQN算法(详细注释版)
DQN算法
DQN算法使用的常见问题
Q1: 为什么用目标网络而非Q网络直接计算?
- 答案:避免“移动目标”问题(训练中Q网络频繁变化导致目标不稳定),提高收敛性。
Q2: 为什么用 max 而不是像SARSA那样采样动作?
- 答案:Q-learning是离线策略算法,直接选择最优动作的Q值(SARSA是在线策略,需采样实际动作)。
Q3: 如果动作空间连续怎么办?
- 答案:需改用DDPG等算法,通过Actor网络输出确定性动作。
DQN算法中的神经网络是如何代替Q值表的
NN代替Q值表的必要性
(1) 处理高维状态(如图像、语音)
- 传统 Q-learning 只能处理低维离散状态(如格子世界),但现实问题(如自动驾驶、游戏 AI)的状态可能是图像、雷达数据等高维输入。
- 神经网络(如 CNN)可以自动提取特征,例如:
- Atari 游戏(输入是像素)→ CNN 提取空间特征。
- 机器人控制(输入是传感器数据)→ MLP 或 LSTM 处理时序。
(2) 泛化能力(Generalization)
- Q-table 必须遍历所有 (s,a)(s,a) 才能学习,但神经网络可以通过相似状态 泛化:
- 例如:在迷宫游戏中,即使遇到新路径,神经网络也能基于相似状态预测 Q 值。
(3) 端到端学习(End-to-End Learning)
- 传统方法需要手工设计状态特征(如“距离目标多远”),但 DQN 可以直接从原始输入(如像素)学习策略,减少人工干预。
(4) 适用于连续动作空间
- Q-table 只能处理离散动作(如“左/右/跳”),但神经网络可以输出连续动作(如“方向盘转角 30°”)。
神经网络的优势
| 对比维度 | Q-table | DQN(神经网络) |
|---|---|---|
| 存储方式 | 离散表格存储 | 连续函数逼近 |
| 适用场景 | 低维离散状态 | 高维连续状态(图像、传感器数据) |
| 泛化能力 | 只能查表,无法泛化 | 相似状态自动泛化 |
| 训练方式 | 直接更新 Q 值 | 梯度下降优化 NN |
| 计算效率 | 状态多时存储爆炸 | 参数量固定,适合 GPU 加速 |
NN如何具体代替Q值表
之前我们学习的Q值表,其中s和a分别代表横纵坐标。值表示的是当前的Q值。但是当我们用DQN表示Q值表之后,输入的是各种状态
lr = 2e-3
num_episodes = 500
hidden_dim = 128
gamma = 0.98
epsilon = 0.01
target_update = 10
buffer_size = 10000
minimal_size = 500
batch_size = 64
device = torch.device("cuda") if torch.cuda.is_available() else torch.device("cpu")env_name = 'CartPole-v0'
env = gym.make(env_name)
random.seed(0)
np.random.seed(0)
env.seed(0)
torch.manual_seed(0)
replay_buffer = ReplayBuffer(buffer_size)
state_dim = env.observation_space.shape[0]
action_dim = env.action_space.n
agent = DQN(state_dim, hidden_dim, action_dim, lr, gamma, epsilon, target_update, device) # 构建智能体return_list = []
for i in range(10):with tqdm(total=int(num_episodes / 10), desc='Iteration %d' % i) as pbar:for i_episode in range(int(num_episodes / 10)):episode_return = 0state = env.reset()done = Falsewhile not done:action = agent.take_action(state) # 先采取贪婪策略获得动作next_state, reward, done, _ = env.step(action)# 其中的env是gym环境,env.step()函数会获得环境给予的反馈replay_buffer.add(state, action, reward, next_state, done)# 然后将函数给与的反馈加入到缓存中state = next_state # 并且下一个状态也是.step()函数给出的,不断将新状态加入到缓存中,并将新状态赋值给当前的状态episode_return += reward# 当buffer数据的数量超过一定值后,才进行Q网络训练,这一点沿用的是n-step Sarsa算法中的滑动窗口策略if replay_buffer.size() > minimal_size:b_s, b_a, b_r, b_ns, b_d = replay_buffer.sample(batch_size) # 然后开始随机采样,注意在n-step Sarsa算法中采用的是用n步后的数据逐个更新当前数据。而在DQN算法中是随机采样,会在buffer中随机采取数据然后去更新agent。transition_dict = {'states': b_s,'actions': b_a,'next_states': b_ns,'rewards': b_r,'dones': b_d}agent.update(transition_dict) # 用随机采样的结果再次去更新agentreturn_list.append(episode_return)if (i_episode + 1) % 10 == 0:pbar.set_postfix({'episode':'%d' % (num_episodes / 10 * i + i_episode + 1),'return':'%.3f' % np.mean(return_list[-10:])})pbar.update(1)
然后我们接着看DQN的类:
class DQN:''' DQN算法 '''def __init__(self, state_dim, hidden_dim, action_dim, learning_rate, gamma,epsilon, target_update, device):self.action_dim = action_dimself.q_net = Qnet(state_dim, hidden_dim,self.action_dim).to(device) # Q网络# 目标网络self.target_q_net = Qnet(state_dim, hidden_dim,self.action_dim).to(device)# 使用Adam优化器self.optimizer = torch.optim.Adam(self.q_net.parameters(),lr=learning_rate)self.gamma = gamma # 折扣因子self.epsilon = epsilon # epsilon-贪婪策略self.target_update = target_update # 目标网络更新频率self.count = 0 # 计数器,记录更新次数self.device = devicedef take_action(self, state): # epsilon-贪婪策略采取动作if np.random.random() < self.epsilon:action = np.random.randint(self.action_dim)# 这是一个随机整数生成函数,返回一个在 [0, self.action_dim) 区间内的随机整数。self.action_dim 是动作空间的维度,表示智能体可以选择的动作数量。这段代码的作用是从所有可能的动作中随机选择一个动作。else:state = torch.tensor([state], dtype=torch.float).to(self.device)action = self.q_net(state).argmax().item()return actiondef update(self, transition_dict):states = torch.tensor(transition_dict['states'],dtype=torch.float).to(self.device)actions = torch.tensor(transition_dict['actions']).view(-1, 1).to(self.device)rewards = torch.tensor(transition_dict['rewards'],dtype=torch.float).view(-1, 1).to(self.device)next_states = torch.tensor(transition_dict['next_states'],dtype=torch.float).to(self.device)dones = torch.tensor(transition_dict['dones'],dtype=torch.float).view(-1, 1).to(self.device)q_values = self.q_net(states).gather(1, actions) # Q值# 下个状态的最大Q值max_next_q_values = self.target_q_net(next_states).max(1)[0].view(-1, 1)q_targets = rewards + self.gamma * max_next_q_values * (1 - dones) # TD误差目标dqn_loss = torch.mean(F.mse_loss(q_values, q_targets)) # 均方误差损失函数self.optimizer.zero_grad() # PyTorch中默认梯度会累积,这里需要显式将梯度置为0dqn_loss.backward() # 反向传播更新参数self.optimizer.step()if self.count % self.target_update == 0:self.target_q_net.load_state_dict(self.q_net.state_dict()) # 更新目标网络self.count += 1
关于Gym的操作
env = gym.make(env_name)
这行代码的作用是创建一个制定环境的实例:
gym.make(env_name):gym是 OpenAI Gym 的库。make是一个函数,用于根据环境名称env_name创建一个环境实例。env_name是一个字符串,表示要加载的环境的名称。例如:"CartPole-v1":一个经典的平衡杆任务,目标是通过左右移动小车来保持竖直的杆不倒。"MountainCar-v0":一个山地车任务,目标是让小车爬到山顶。"LunarLander-v2":一个登月器任务,目标是安全着陆。
env:- 这是一个环境对象,包含了环境的所有状态和行为接口。通过这个对象,你可以与环境进行交互,例如重置环境、执行动作等。
state = env.reset()
这句代码的作用是将环境重置到初始状态:
env.reset():- 这是一个方法,用于将环境重置为初始状态。
- 它返回环境的初始状态(
state),这个状态是一个数组或数值,具体取决于环境的定义。 - 在强化学习中,每次训练或测试的开始都需要调用
reset()方法,以确保环境从一个一致的初始状态开始。
state:- 这是环境的初始状态,通常是一个数组或数值,表示环境的当前状态。
- 例如,在
CartPole-v1环境中,state可能是一个包含小车位置、小车速度、杆的角度和杆的角速度的数组。
next_state, reward, done, _ = env.step(action)
首先分析env.action(),这个是OpenAI Gym中的核心函数之一,用于在环境中执行一个动作,并且获取环境的反馈。这个函数是智能体和环境交互的主要方式,借着解释它的功能和返回值。
功能
env.step(action) 的作用是:
- 执行动作:根据智能体提供的动作
action,在环境中执行这个动作。 - 获取反馈:返回环境在执行动作后的状态变化、奖励值、任务是否结束的标志,以及一些额外信息。
参数
action:- 这是智能体选择的动作,通常是一个整数或数组,具体取决于环境的定义。
- 在离散动作空间的环境中(如
CartPole-v1),action是一个整数。 - 在连续动作空间的环境中(如
MountainCarContinuous-v0),action是一个数组。
返回值
env.step(action) 返回四个值:
next_state:- 执行动作后环境的下一个状态。
- 这是一个数组或数值,具体取决于环境的定义。
- 例如,在
CartPole-v1中,next_state是一个包含小车位置、小车速度、杆的角度和杆的角速度的数组。
reward:- 执行动作后获得的奖励值。
- 这是一个浮点数,表示智能体在当前步骤的性能。
- 例如,在
CartPole-v1中,每一步的奖励通常是1.0,直到任务结束。
done:- 一个布尔值,表示任务是否结束。
- 如果
done为True,表示任务已经完成(例如,小车到达目标位置、杆倒下等)。 - 如果
done为False,表示任务尚未结束,智能体可以继续执行动作。
info:- 一个字典,包含一些额外的信息。
- 这些信息通常用于调试或提供环境的额外细节。
- 例如,在某些环境中,
info可能包含违反规则的次数、任务完成的原因等。
import gym# 创建环境
env = gym.make("CartPole-v1")# 重置环境,获取初始状态
state = env.reset()# 执行一个动作(例如,0 表示向左推,1 表示向右推)
action = 1
next_state, reward, done, _ = env.step(action)print("初始状态:", state)
print("下一个状态:", next_state)
print("奖励:", reward)
print("任务是否结束:", done)
关于缓存池的操作(ReplayBuffer)
主要对应的是主函数中这一句代码 b_s, b_a, b_r, b_ns, b_d = replay_buffer.sample(batch_size)
我们来讲讲replay_buffer,其产生源于 replay_buffer = ReplayBuffer(buffer_size)
所以最后还是要归结到ReplayBuffer类,也就涉及到DQN算法的创新点:缓存机制。
有点类似于n-step Sarsa 算法,但又不完全一样:
class ReplayBuffer:''' 经验回放池 '''def __init__(self, capacity):# 一开始是设计了一个队列,这个很简单self.buffer = collections.deque(maxlen=capacity) # 队列,先进先出def add(self, state, action, reward, next_state, done): # 将数据加入buffer# 此add操作就是队列操作,没什么可说的self.buffer.append((state, action, reward, next_state, done))# 关键在于采样函数,def sample(self, batch_size): # 从buffer中采样数据,数量为batch_size# random.sample()是从列表中随机选择不重复的元素,第一个参数的含义是从self.buffer中采样,并采样batch_size个元素,并且赋值给transitionstransitions = random.sample(self.buffer, batch_size)# zip(*transitions)就是将transitions中的每个元祖解包state, action, reward, next_state, done = zip(*transitions)# 返回的是一个个元祖return np.array(state), action, reward, np.array(next_state), donedef size(self): # 目前buffer中数据的数量return len(self.buffer)
zip(*transitions)操作详解
我们首先假设transitions是:
[(s1, a1, r1, s1_next, done1),(s2, a2, r2, s2_next, done2),...
]
之后我们用zip(*transitions)解包后,会得到:
((s1, s2, ...), # 所有的 state(a1, a2, ...), # 所有的 action(r1, r2, ...), # 所有的 reward(s1_next, s2_next, ...), # 所有的 next_state(done1, done2, ...), # 所有的 done
)
也就是把transitions的每一部分都给拆分开,然后赋给不同的变量,形成元祖,作为函数返回值
智能体的更新(详解update())
采样之后,将其包装成transition_dict,之后我们分析agent.update(transition_dict)
def update(self, transition_dict):# 将传入的字典的参数都给转化成张量states = torch.tensor(transition_dict['states'],dtype=torch.float).to(self.device)actions = torch.tensor(transition_dict['actions']).view(-1, 1).to(self.device)rewards = torch.tensor(transition_dict['rewards'],dtype=torch.float).view(-1, 1).to(self.device)next_states = torch.tensor(transition_dict['next_states'],dtype=torch.float).to(self.device)dones = torch.tensor(transition_dict['dones'],dtype=torch.float).view(-1, 1).to(self.device)# 这里的q_net是一开始初始化的神经网络# self.q_net()会直接返回forward()函数的返回值,由于继承了nn.Model(),因此forward()函数是自动执行的# q_values = self.q_net(states) 的返回值是 forward 函数的输出,而 forward 函数的自动执行是由PyTorch框架的设计决定的。q_values = self.q_net(states).gather(1, actions) # Q值#下个状态的最大Q值max_next_q_values = self.target_q_net(next_states).max(1)[0].view(-1, 1)q_targets = rewards + self.gamma * max_next_q_values * (1 - dones) # TD误差目标dqn_loss = torch.mean(F.mse_loss(q_values, q_targets)) # 均方误差损失函数self.optimizer.zero_grad() # PyTorch中默认梯度会累积,这里需要显式将梯度置为0dqn_loss.backward() # 反向传播更新参数self.optimizer.step()if self.count % self.target_update == 0:self.target_q_net.load_state_dict(self.q_net.state_dict()) # 更新目标网络self.count += 1
self.q_net(states).gather(1, actions)操作
首先我们知道,网络中除了init函数,forward函数本身就是有返回值的,并且forward操作是自动执行的,因此直接可以用变量去接
终点在于后续的.gather()操作
如何理解神经网络的传参操作?我们单看网络结构的定义,forward()函数就只有一个形参位置
class Qnet(torch.nn.Module):''' 只有一层隐藏层的Q网络 '''def __init__(self, state_dim, hidden_dim, action_dim):super(Qnet, self).__init__()self.fc1 = torch.nn.Linear(state_dim, hidden_dim)self.fc2 = torch.nn.Linear(hidden_dim, action_dim)def forward(self, x):x = F.relu(self.fc1(x)) # 隐藏层使用ReLU激活函数return self.fc2(x)
所以返回的是"self.fc2(states)",也就是说返回参数的维度和传入的参数没关系。和输出层的维度和输出层前一层的维度相关:例如输出层的维度是64,输出层前一层的维度是32,那么输出的维度就是(32,64)
self.q_net(states)
- 功能:
输入状态states(通常是一个批量的状态,形状为[batch_size, state_dim]),通过 Q 网络 (q_net) 计算每个状态下所有可能动作的 Q 值。 - 输出:
一个形状为[batch_size, num_actions]的张量,表示每个状态下所有动作的 Q 值。
示例(假设batch_size=3,num_actions=4):
q_values = self.q_net(states) # 输出示例:
tensor([[0.1, 0.4, -0.2, 0.5], # 状态1的4个动作的Q值[0.3, 0.6, 0.0, 0.8], # 状态2的Q值[-0.1, 0.2, 0.7, 0.3]]) # 状态3的Q值
并且我们要注意:输入self.q_net(state)得到的是整体的输出表,我们根据传入的字典更新的内容必须是跟动作相关的,因此我们得到整体的输出表是无用的,故需要一个筛选的操作,也就是gather(1, actions)完成的内容:
actions 的含义与形状
actions:实际执行的动作索引(整数),形状为 [batch_size, 1]。
示例:
actions = tensor([[1], # 状态1执行动作1[2]]) # 状态2执行动作2
那gather()函数和action参数组合,其实就是筛选出action表示的Q值
.gather(1, actions) 的作用
- 功能:沿维度
1(动作维度)从q_values中按actions的索引提取对应的Q值。 - 输出形状:
[batch_size, 1],即每个状态下实际执行动作的Q值。
接上例:
selected_q = q_values.gather(1, actions) # 输出:
tensor([[0.4], # 状态1的动作1的Q值[0.0]]) # 状态2的动作2的Q值
为什么需要这个操作?
(1) 计算TD误差(关键用途)
在更新Q值时,需要计算实际执行动作的预测Q值与目标Q值的差异(TD误差):
# 预测Q值(实际执行动作的Q值)
predicted_q = q_values.gather(1, actions) # 形状: [batch_size, 1]# 目标Q值(如Q-learning的最大Q值)
target_q = rewards + gamma * next_q_values.max(1)[0] # 形状: [batch_size]# 计算损失(MSE)
loss = (predicted_q - target_q).pow(2).mean()
(2) 避免冗余计算
- 如果直接使用
q_values(所有动作的Q值),会引入无关动作的噪声,而gather精确提取相关值。
类比协助理解
想象你在玩一个游戏:
q_values:游戏界面显示每个按钮(动作)的预期得分(Q值)。actions:你实际按下的按钮编号。gather:从界面显示的得分中,只记录你按下按钮对应的分数,用于计算你的表现。
self.target_q_net(next_states).max(1)[0].view(-1, 1)
我们分步骤解释,其实也是为了获取最大Q值的操作:
self.target_q_net(next_states)
还是输入状态,我们会得到一个Q值表。
.max(1)[0]
沿维度1(动作维度)取最大值,返回两个值:分别是最大值和最大索引,之后通过[0]取出的是最大值部分,形状是[batch_size]。
.view(-1, 1)
将结果从 [batch_size] 调整为 [batch_size, 1],以便后续与奖励等张量运算。
self.optimizer.step()
作用:执行优化器的一步更新操作,用于根据当前的梯度信息更新模型的参数。
详细步骤:
-
计算梯度:
- 在执行
self.optimizer.step()之前,通常会先计算模型的损失函数,并通过反向传播(loss.backward())计算梯度。 - 梯度会被存储在模型参数的
.grad属性中。
- 在执行
-
更新参数:
-
调用
self.optimizer.step()时,优化器会根据当前的梯度信息和优化算法的规则来更新模型的参数。 -
例如,对于 SGD 优化器,更新规则通常是:
θnew=θold−η⋅∇L
其中,θ 是模型参数,η 是学习率,∇L 是损失函数的梯度。
-
-
清空梯度:
- 在更新参数后,通常需要清空梯度,以便下一次迭代可以重新计算梯度。
- 这可以通过调用
self.optimizer.zero_grad()来完成。
神经网络复习
假设我们有500条数据,20个特征,标签为3分类,第一层有13个神经元,第二层有8个神经元,第三层是输出层;其中第一层的激活函数是relu,第二层的激活函数是sigmoid。那么我们该如何设计数据和网络架构呢?
首先第一点,数据和特征的关系:
数据是行(一行行数据),特征是列。
import torch
import torch.nn as nn
from torch.nn import functional as F
from torch import optim # 梯度下降优化算法库torch.manual_seed(420)
X = torch.rand((500,20),dtype=torch.float32) # 设计输入数据,500行是500个输入数据,20列表示有20个特征
y = torch.randint(low=0,high=3,size=(500,1),dtype=torch.float32)# 随后我们定义网络架构
# torch.nn中有nn.Module和nn.functional
# 前者中是一些网络层和结构,后者是需要调用的各种函数,那么实际上我们可以从nn.Module中继承神经网络架构
class Model(nn.Module):# 实例化的时候,init函数会被瞬间调用,至于forward函数,是在实例化之后被调用的def __init__(self,in_features = 10,out_features = 2):# 为了帮助我们继承更多父类的细节,我们需要super()# 注意这里继承的是Model的父类,虽然参数中填写的是Model。那实际上查找或者说继承的是nn.Module# 第二个参数表示的是希望通过继承的类替换什么内容,这里是self。那替换的是什么内容呢?是.后面的内容,就是替换的init函数,也就是将nn.Module中的init()函数复制过来作为我Model初始化的第一行# 如果没有super(),那么子类将不会有父类中init函数的方法和属性super(Model,self).__init__()# 随后开始实例化内容的编写,在init函数中,我们一般要实例化的是层的内容self.linear1 = nn.Linear(in_features,13,bias=True) #输入层不用self.linear2 = nn.Linear(13,8,bias=True)self.output = nn.Linear(8,out_features,bias=True)# 最后的输出结构,就是样本数量*输出层神经元个数 def forward(self,x):z1 = self.linear1(x)sigma1 = torch.relu(z1)z2 = self.linear2(sigma1)sigma2 = torch.sigmoid(z2)z3 = self.output(sigma2)#sigma3 = F.softmax(z3,dim=1)return z3
# 定义了网络架构,之后仅需要定义损失函数并且将预测值输入进去,即可进行反向传播
criterion = nn.CrossEntropyLoss()
# 前向传播得到预测值
zhat = net.forward(X)
# 得到损失
loss = criterion(zhat,y.reshape(500).long())
# 反向传播,反向传播后其实也没有更新权重
loss.backward()
# 但是为了让梯度下降的更合理,也为了不陷入局部最优,所以我们需要一些技巧进行梯度下降,比方说动量法
# 首先需要定义优化算法
opt = optim.SGD(net.parameters() , lr=lr #学习率, momentum = gamma #动量参数)# 接下来开始进行一轮完整的梯度下降:
zhat = net.forward(X)
loss = criterion(zhat,y.reshape(500).long()) #损失函数值
loss.backward() #反向传播
opt.step() #更新权重w,从这一瞬间开始,坐标点就发生了变化,所有的梯度必须重新计算
opt.zero_grad() #清除原来储存好的,基于上一个坐标点计算的梯度,为下一次计算梯度腾出空间# 实际上也不只经过一轮训练,我们可能要经过好几轮的训练,所以需要迭代,迭代需要batch_size与epoches
# 首先是小批量训练,batch_size。然后是epoch,表示迭代次数
# 如果要进行小批量梯度下降,那么就需要对数据进行采样、分割等操作。
# 合并张量和标签,我们就要使用TensorDataset,也就是将维度一致的tensor进行打包。
# 打包成一个对象之后,就需要使用划分小批量的功能DataLoader
# DataLoader可以接受任意形式的数组、张量作为输入,并将其一次性转换为神经网络可以接受的tensor
from torch.utils.data import TensorDataset
from torch.utils.data import DataLoader
import numpy as nptorch.manual_seed(420)
X = torch.rand((50000,20),dtype=torch.float32) * 100 #要进行迭代了,增加样本数量
y = torch.randint(low=0,high=3,size=(50000,1),dtype=torch.float32)epochs = 4
bs = 4000
data = TensorDataset(X,y) # 先合并并打包
batchdata = DataLoader(data, batch_size=bs, shuffle = True) # 然后将其转化成神经网络能接受的tensor# 接着我们看看一般的训练函数是如何定义的
def fit(net,batchdata,lr=0.01,epochs=5,gamma=0):criterion = nn.NLLLoss() #定义损失函数opt = optim.SGD(net.parameters(), lr=lr,momentum=gamma) #定义优化算法correct = 0samples = 0for epoch in range(epochs):for batch_idx, (x,y) in enumerate(batchdata):y = y.view(x.shape[0])sigma = net.forward(x) # 我们一般将前向传播->计算损失->反向传播->更新梯度->梯度清零的操作放到循环或者放到训练函数中去做loss = criterion(sigma,y)loss.backward()opt.step()opt.zero_grad()#求解准确率yhat = torch.max(sigma,1)[1]correct += torch.sum(yhat == y)samples += x.shape[0]if (batch_idx+1) % 125 == 0 or batch_idx == len(batchdata)-1:print('Epoch{}:[{}/{}({:.0f}%)]\tLoss:{:.6f}\t Accuracy:{:.3f}'.format(epoch+1,samples,len(batchdata.dataset)*epochs,100*samples/(len(batchdata.dataset)*epochs),loss.data.item(),float(correct*100)/samples))
获取输入空间和输出空间的维度
state_dim = env.observation_space.shape[0]
action_dim = env.action_space.n
state_dim:状态的特征维度,决定神经网络输入大小。action_dim:可选动作的数量,决定神经网络输出大小。- 关键作用:为构建DQN网络提供参数,确保智能体与环境的交互维度匹配。
实例:
import torch.nn as nnclass QNetwork(nn.Module):def __init__(self, state_dim, action_dim):super().__init__()self.fc1 = nn.Linear(state_dim, 64) # 输入层维度=state_dimself.fc2 = nn.Linear(64, action_dim) # 输出层维度=action_dim# 初始化网络
q_net = QNetwork(state_dim, action_dim)
相关文章:
)
DQN算法(详细注释版)
DQN算法 DQN算法使用的常见问题 Q1: 为什么用目标网络而非Q网络直接计算? 答案:避免“移动目标”问题(训练中Q网络频繁变化导致目标不稳定),提高收敛性。 Q2: 为什么用 max 而不是像SARSA那样采样动作?…...

sizeof 与strlen的区别
sizeof 和 strlen 是C和C 中用于处理数据大小和字符串长度的两个不同的操作符/函数,它们的区别如下: 概念和用途 - sizeof 是一个操作符,用于计算数据类型或变量在内存中所占的字节数,它是在编译时确定的,与数据的…...

论文阅读:HySCDG生成式数据处理流程
论文地址: The Change You Want To Detect: Semantic Change Detection In Earth Observation With Hybrid Data Generation Abstract 摘要内容介绍 📌 问题背景 “Bi-temporal change detection at scale based on Very High Resolution (VHR) images is crucia…...
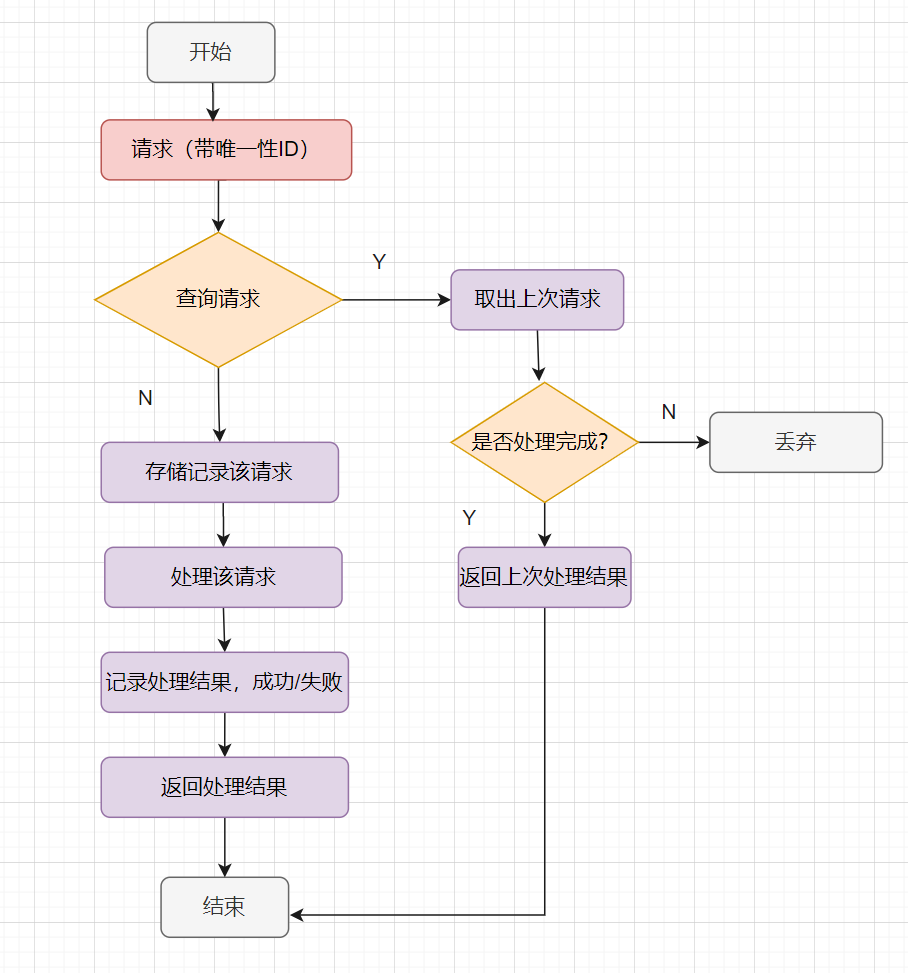
10万QPS高并发请求,如何防止重复下单
1. 前端拦截 首先因为是10万QPS的高并发请求,我们要保护好系统,那就是尽可能减少用户无效请求。 1.1 按钮置灰 很多用户抢票、抢购、抢红包等时候,为了提高抢中的概率,都是疯狂点击按钮。会触发多次请求,导致重复下…...

Xilinx IP 解析之 Block Memory Generator v8.4 ——02-如何配置 IP(仅 Native 接口)
相关文章: Xilinx IP 解析之 Block Memory Generator v8.4 ——01-手册重点解读(仅Native RAM) – 徐晓康的博客 Xilinx IP 解析之 Block Memory Generator v8.4 ——02-如何配置 IP(仅 Native RAM) – 徐晓康的博客 V…...

什么是高考?高考的意义是啥?
能见到这个文章的群体,应该都经历过高考,突然想起“什么是高考?意义何在?” 一、高考的定义与核心功能 **高考(普通高等学校招生全国统一考试)**是中国教育体系的核心选拔性考试,旨在为高校选拔…...

RISC-V 开发板 + Ubuntu 23.04 部署 open_vins 过程
RISC-V 开发板 Ubuntu 23.04 部署 open_vins 过程 1. 背景介绍2. 问题描述3. 解决过程3.1 卸载旧版本3.2 安装 Suitesparse v5.8.03.3 安装 Ceres Solver v2.0.03.4 解决编译爆内存问题 同步发布在个人笔记RISC-V 开发板 Ubuntu 23.04 部署 open_vins 过程 1. 背景介绍 最近…...

量子计算突破:新型超导芯片重构计算范式
2024年IBM 1281量子比特超导芯片实现0.001%量子错误率,计算速度达经典超算2.5亿倍。本文解析: 物理突破:钽基超导材料使量子相干时间突破800μs(提升15倍)架构革命:十字形…...

Spring Cloud 多机部署与负载均衡实战详解
🧱 一、引言 为什么需要多机部署? 解决单节点性能瓶颈,提升系统可用性和吞吐量 在传统单机部署模式下,系统的所有服务或应用都运行在单一服务器上。这种模式在小型项目或低并发场景中可能足够,但随着业务规模扩大、用…...

基于定制开发开源AI智能名片S2B2C商城小程序的首屏组件优化策略研究
摘要:在数字化转型背景下,用户对首屏交互效率的诉求日益提升。本文以"定制开发开源AI智能名片S2B2C商城小程序"为技术载体,结合用户行为数据与认知心理学原理,提出首屏组件动态布局模型。通过分析搜索栏、扫码入口、个人…...

EasyRTC嵌入式音视频通信SDK音视频功能驱动视频业务多场景应用
一、方案背景 随着互联网技术快速发展,视频应用成为主流内容消费方式。用户需求已从高清流畅升级为实时互动,EasyRTC作为高性能实时音视频框架,凭借低延迟、跨平台等特性,有效满足市场对多元化视频服务的需求。 二、EasyRTC技术…...

Flink 失败重试策略 :restart-strategy.type
在 Apache Flink 中,restart-strategy.type 用于指定作业的重启策略(Restart Strategy),它决定了作业在失败后如何恢复。 Flink 提供了 4 种内置重启策略,可以通过 flink-conf.yaml 或代码动态配置。 1. 可配置的 rest…...
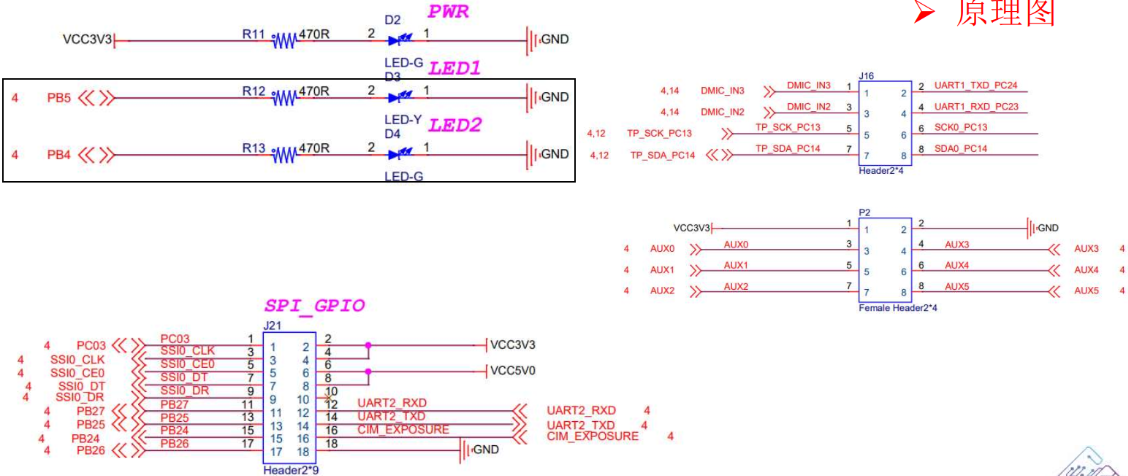
linux下gpio控制
linux下gpio控制 文章目录 linux下gpio控制1.中断命令控制/sys/class/gpio/export终端命令控制led 2.应用程序控制 3.驱动代码控制 1.中断命令控制 通用GPIO主要用于产生输出信号和捕捉输入信号。每组GPIO均可以配置为输出输入以及特定的复用功能。 当作为输入时,内…...
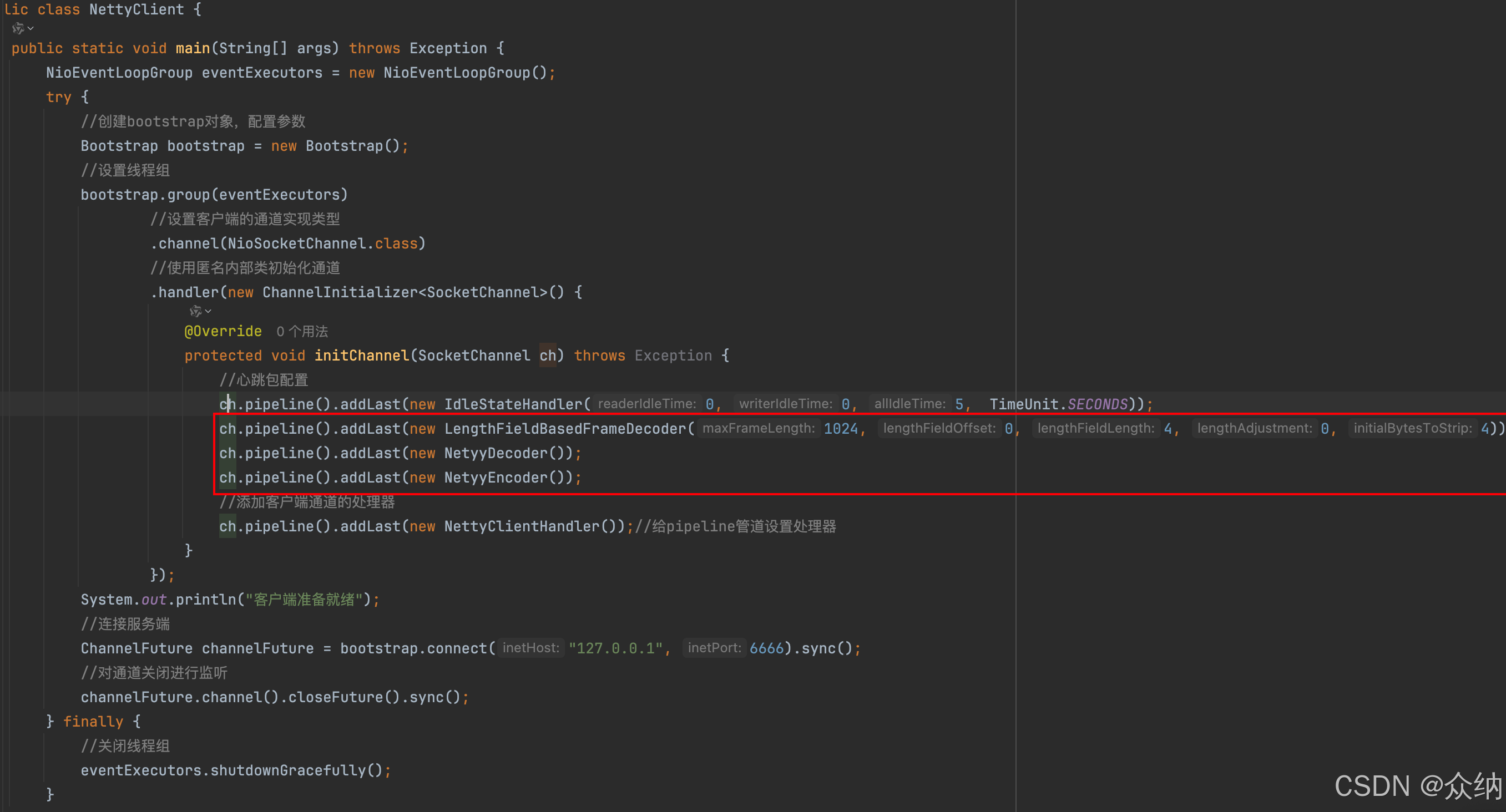
Spring Boot 从Socket 到Netty网络编程(下):Netty基本开发与改进【心跳、粘包与拆包、闲置连接】
上一篇:《Spring Boot 从Socket 到Netty网络编程(上):SOCKET 基本开发(BIO)与改进(NIO)》 前言 前文中我们简单介绍了基于Socket的BIO(阻塞式)与NIO(非阻塞式࿰…...
Orthanc:轻量级PACS服务器与DICOMweb支持的技术详解
🧑 博主简介:CSDN博客专家、CSDN平台优质创作者,高级开发工程师,数学专业,10年以上C/C++, C#, Java等多种编程语言开发经验,拥有高级工程师证书;擅长C/C++、C#等开发语言,熟悉Java常用开发技术,能熟练应用常用数据库SQL server,Oracle,mysql,postgresql等进行开发应用…...
量子计算导论课程设计 之 PennyLane环境搭建
文章目录 具体配置conda 虚拟环境配置Pennylane 正所谓,磨刀不误砍柴工,想要进行量子计算导论的课程设计,首先就是搭建好平台,推荐大家就是本地搭建,那么下面有三种选择 QiskitTensorFlow QuantumPennylane 具体配置…...

GAN优化与改进:从条件生成到训练稳定性
摘要 本文聚焦生成对抗网络(GAN)的核心优化技术与改进模型。系统解析 条件生成对抗网络(CGAN) 的可控生成机制、深度卷积GAN(DCGAN) 的架构创新,揭示GAN训练崩溃的本质原因,并介绍W…...

【Dv3Admin】系统视图下载中心API文件解析
大文件导出与批量数据下载常常成为后台系统性能瓶颈,合理管理下载任务是保障系统稳定运行的关键。任务化下载机制通过异步处理,避免前端等待阻塞,提升整体交互体验。 围绕 download_center.py 模块,剖析其在下载任务创建、查询、…...

linux库(AI回答)
STL POSIX关系 DeepSeek-R1 回答完成 搜索全网22篇资料 STL(标准模板库)和 POSIX(可移植操作系统接口)是两种不同领域的技术标准,它们在 C/C 开发中各有侧重,但可以协同使用。以下是它们的关系和区别&…...
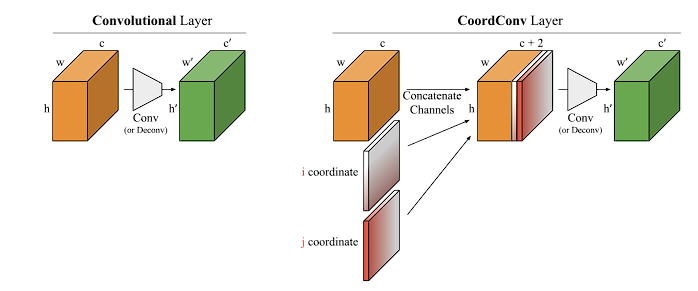
CoordConv: CNN坐标感知特征适应
传统卷积 vs CoordConv 详细对比 传统卷积对空间位置不敏感,CoordConv通过显式添加坐标信息解决这个问题在特征图中嵌入(x, y)坐标和可选的径向距离r使模型能够感知空间位置关系 1. 传统卷积的"空间位置不敏感"问题 传统卷积的特点: 输入: …...
)
Kafka 快速上手:安装部署与 HelloWorld 实践(二)
四、Kafka 的 HelloWorld 实践 完成 Kafka 的安装部署后,我们就可以进行一些简单的操作来体验 Kafka 的功能了。下面通过一个 HelloWorld 示例,展示如何在 Kafka 中创建主题、发送消息和消费消息。 (一)创建主题(Top…...
opencv学习笔记2:卷积、均值滤波、中值滤波
目录 一、卷积概念 1.定义 2.数学原理 3.实例计算 (1) 输入与卷积核 (2)计算输出 g(2,2) 4.作用 二、针对图像噪声的滤波技术——均值滤波 1.均值滤波概念 (1)均值滤波作用 (2&#…...

在 Android Studio 中使用 GitLab 添加图片到 README.md
1. 将图片文件添加到项目中 在项目根目录下创建一个 images 或 assets 文件夹 将你的图片文件(如 screenshot.png)复制到这个文件夹中 2. 跟提交项目一样,提交图片到 GitLab 在 Android Studio 的 Git 工具窗口中: 右键点击图片…...
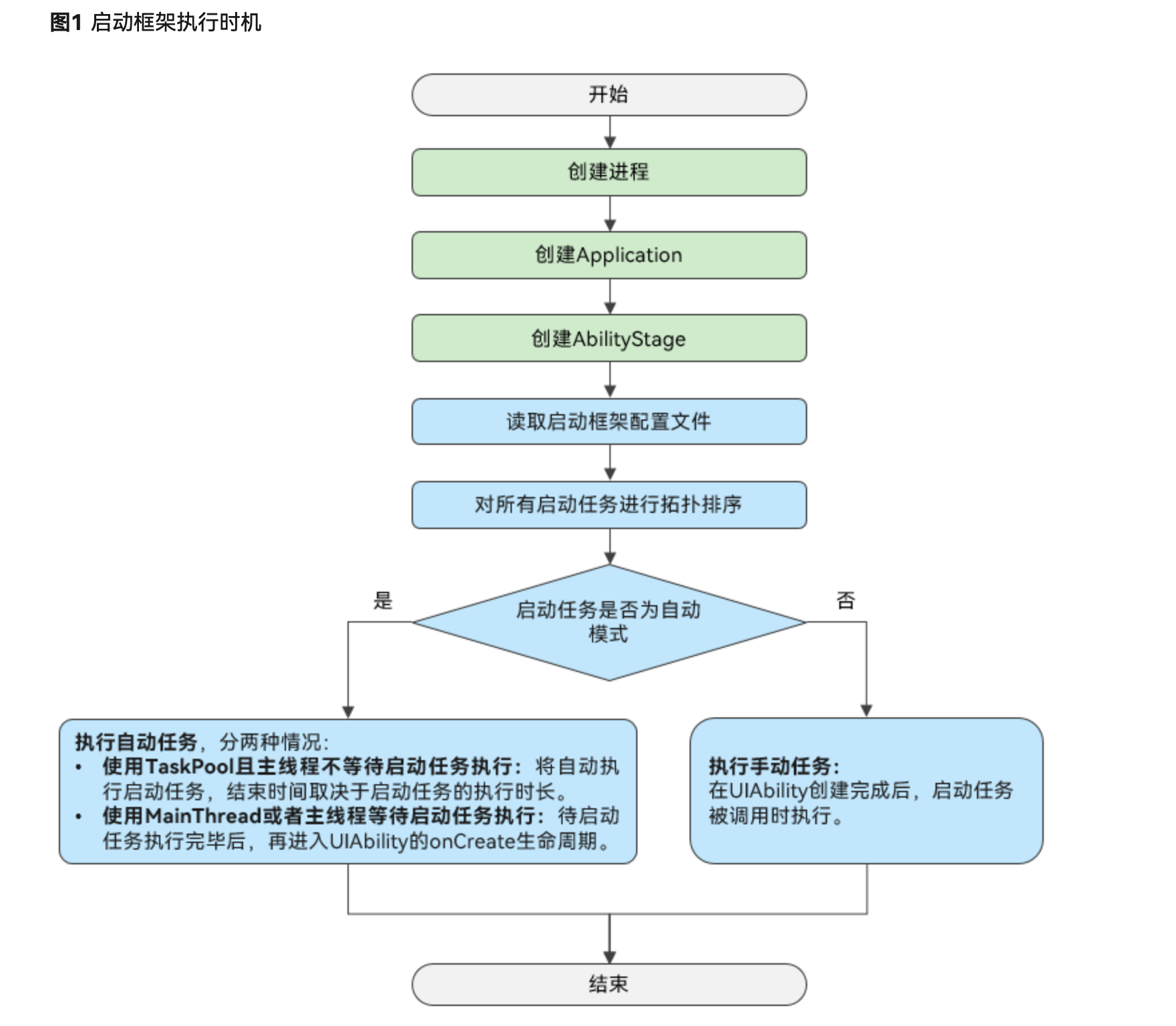
HarmonyOS:如何在启动框架中初始化HMRouter
应用启动时通常需要执行一系列初始化启动任务,如果将启动任务都放在应用主模块(即entry类型的Module)的UIAbility组件的onCreate生命周期中,那么只能在主线程中依次执行,不但影响应用的启动速度,而且当启动…...

Ubuntu下有关UDP网络通信的指令
1、查看防火墙状态: sudo ufw status # Ubuntu 2、 检查系统全局广播设置 # 查看是否忽略广播包(0表示接收,1表示忽略) sysctl net.ipv4.icmp_echo_ignore_broadcasts# 查看是否允许广播转发(1表示允许)…...
)
JavaWeb预习(jdbc)
基础 1.驱动程序接口Driver 每种数据库都提供了数据库驱动程序,并且都提供了一个实现java.sql.Driver接口的类,称为Driver 对于MySql,其Driver类为com.mysql.jdbc.Driver,加载该类的语句为: Class.forName("c…...
Web3 借贷与清算机制全解析:链上金融的运行逻辑
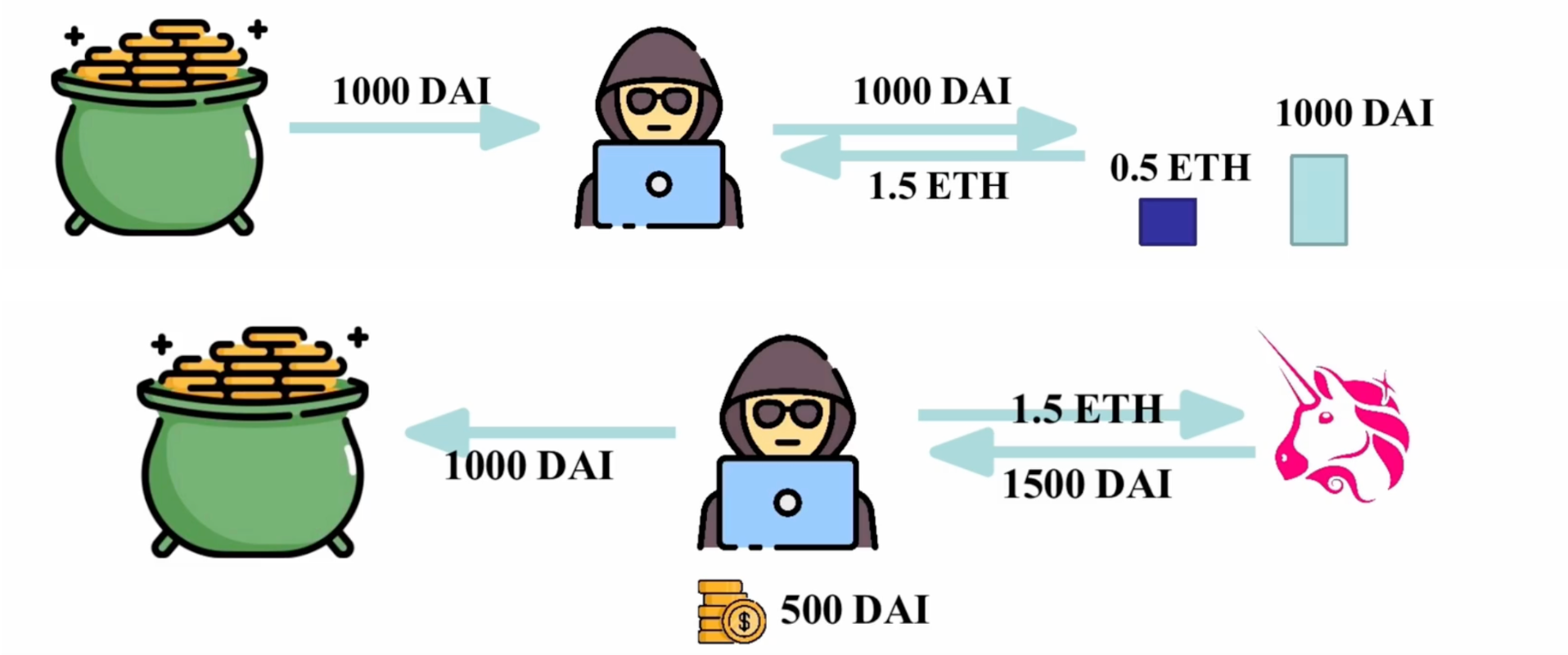
Web3 借贷与清算机制全解析:链上金融的运行逻辑 超额抵押借款 例如,借款人用ETH为抵押借入DAI;借款人的ETH的价值一定是要超过DAI的价值;借款人可以任意自由的使用自己借出的DAI 稳定币 第一步:借款人需要去提供一定…...

【Vue3】(三)vue3中的pinia状态管理、组件通信
目录 一、vue3的pinia 二、【props】传参 三、【自定义事件】传参 四、【mitt】传参 五、【v-model】传参(平常基本不写) 六、【$attrs】传参 七、【$refs和$parent】传参 八、provide和inject 一、vue3的pinia 1、什么是pinia? pinia …...

ingress-nginx 开启 Prometheus 监控 + Grafana 查看指标
环境已经部署了 ingress-nginx(DaemonSet 方式),并且 Prometheus Grafana 也已经运行。但之前 /metrics 端点没有暴露 Nginx 核心指标(如 nginx_ingress_controller_requests_total),经过调整后现在可以正…...

SQL进阶之旅 Day 21:临时表与内存表应用
【SQL进阶之旅 Day 21】临时表与内存表应用 文章简述 在SQL开发过程中,面对复杂查询、数据预处理和性能优化时,临时表和内存表是不可或缺的工具。本文深入讲解了临时表(Temporary Table)和内存表(Memory Table&#x…...