android app控制ros机器人一
android开发app,进而通过控制ros机器人,记录开发过程
查阅资料:
rosjava使用较多,已经开发好的app也有开源的案例
rosjava · GitHub
https://github.com/ros-autom/RobotCA
https://github.com/ROS-Mobile/ROS-Mobile-Android
https://github.com/ros-android/android_app_manager
GitHub - ros-android/android_sensors_driver: ROS Driver for Android Sensors
国内:
ros app 下载、ros android app下载、ROS机器人控制app下载_rosapp_白茶-清欢的博客-CSDN博客
robotca没有找到手机可以用的稳定资源,安装了一个有闪退问题,源码打开后也各种问题,然后就改使用ros-mobile了
首先在ubuntu18下安装android studio,选择22.2.1版本
-
Download Android Studio from https://developer.android.com/studio/index.html#linux-bundle
-
安装JDK
sudo apt-get update
sudo apt-get install openjdk-8-jdk
-
按照git教程安装运行,打开项目,更换插件,选择下载的JDK,将 Android Studio 固定到任务栏
使用ROS-Mobile,可以直接下载.apk文件,在手机上安装或者源码下载
https://github.com/ROS-Mobile/ROS-Mobile-Android/tree/master
先打开手机app看看效果,同一wifi环境,ros端启动ros,app端输入ros端ip,ros端口然后可以连接
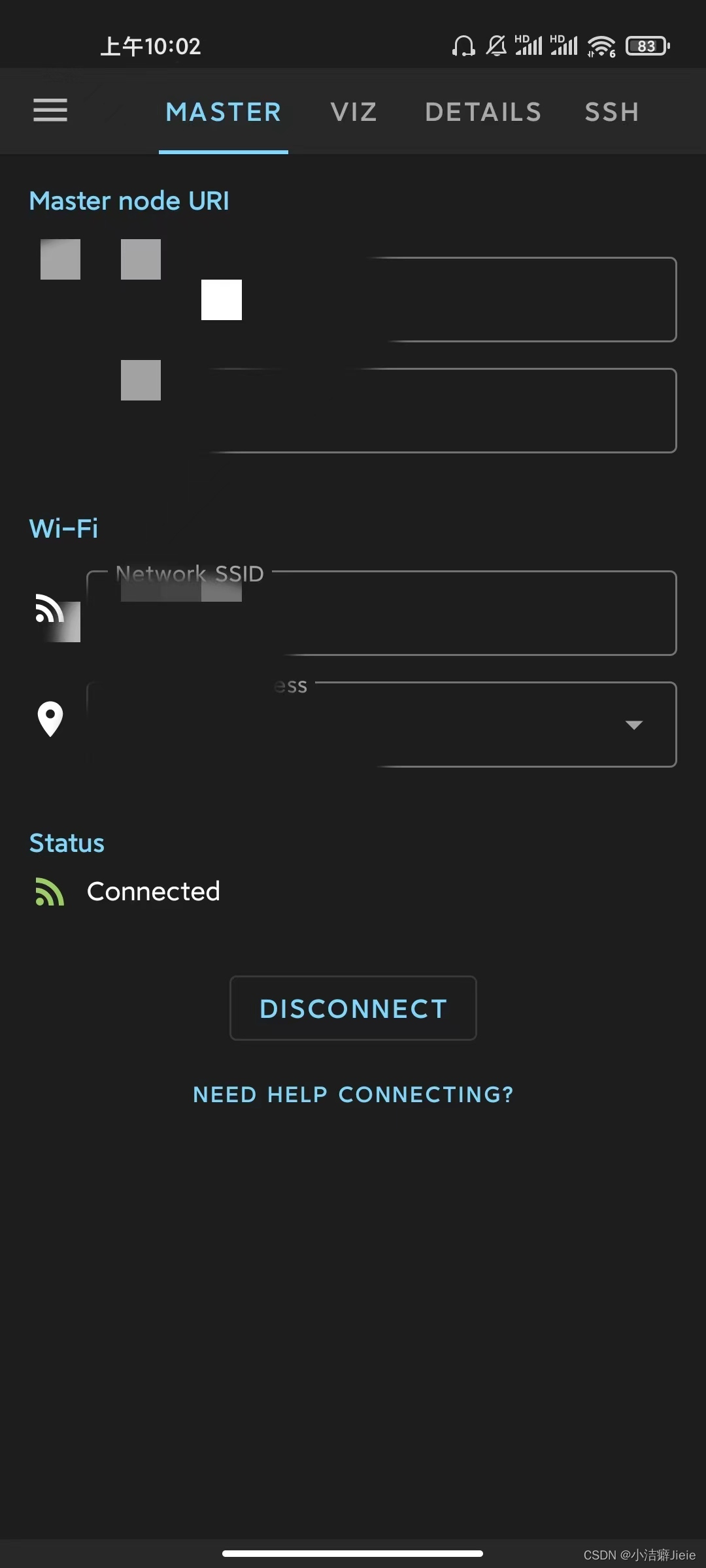
安装ssh服务,并查看状态,显示active(running)表示正在运行
sudo apt-get install openssh-server
sudo service ssh status
然后点击ssh标签进行连接。填写ip 用户名等信息,ssh下把信息填写了,但是没有连接成功。身边大佬给了一个思路,ssh连接前,要给机器人设置静态ip
查网关:
route -n
目标 网关 子网掩码 标志 跃点 引用 使用 接口
0.0.0.0 192.168.2.1 0.0.0.0 UG 600 0 0 wlp2s0
查动态ip:
ifconfig
wlp2s0: flags=4163<UP,BROADCAST,RUNNING,MULTICAST> mtu 1500
inet 192.168.2.115 netmask 255.255.255.0 broadcast 192.168.2.255
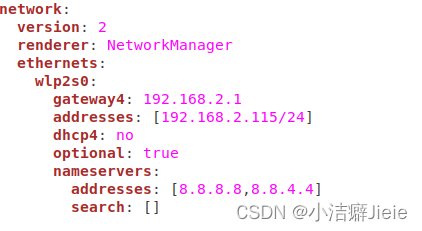
参考教程:【Linux】ubuntu18.04修改IP为静态IP并能够上网(傻瓜式教学)_ubuntu1804静态ip设置后怎么联网_DedicationYu的博客-CSDN博客
对应自己的接口、网关、ip修改,:后必须空格,缩进也要调整好,本人缩进两个空格。
bug:
Invalid YAML: tabs are not allowed for indent:
wlp2s0:
^
一般都是缩进和空格问题:
机器人端需要配置静态ip 和ssh连接,然后输入ip username就可以实现ssh连接了。
输入rostopic list的时候报错,显示command 'rostopic'not found
操作了一些东西,然后重新连接了一下,然后发现可以查看rostopic话题了,不确定哪个教程起作用了,有增加~/.bash_profile文件,把~/.bashrc文件的内容直接复制过去了。
SSH远程执行脚本报错command not found和环境变量问题_ssh 远程执行pm2_nklinsirui的博客-CSDN博客
然后可以添加ros节点,并设置显示界面大小。下面教程有快速上手的视频
[ROS-Mobile] 快手上手教程_哔哩哔哩_bilibili
git的wiki教程中有介绍如何添加自己的节点。(后续可以使用)
当前尝试连接自己的电脑(ubuntu系统环境下),尝试启动笔记本相机驱动,看看是否加载出画面。有录制好的bag包,可以播放bag包,进行测试。
播放数据包,或者启动笔记本相机时,通过ssh都可以订阅到话题消息,但是VIZ界面不显示画面。
下载项目,使用Android Studio打开,报错:
FAILURE: Build failed with an exception.
* Where:
Build file 'D:\AndroidCode\Robot\ROS-Mobile-Android-master\build.gradle' line: 6
* What went wrong:
A problem occurred evaluating root project 'RosAndroid'.
> Could not get resource 'https://github.com/rosjava/rosjava_bootstrap/raw/kinetic/buildscript.gradle'.
> Could not GET 'https://raw.githubusercontent.com/rosjava/rosjava_bootstrap/kinetic/buildscript.gradle'.
> raw.githubusercontent.com
让gpt帮忙差错,指出问题可能在网络代理这块,搜索了一下应该如何配置
Android Studio 配置 Http Proxy_android studio proxy_第89号的博客-CSDN博客
配置网络代理没有解决问题,新思路,下载脚本文件,保存到项目然后直接引用。然后rebuild工程。
相关文章:
android app控制ros机器人一
android开发app,进而通过控制ros机器人,记录开发过程 查阅资料: rosjava使用较多,已经开发好的app也有开源的案例 rosjava GitHub https://github.com/ros-autom/RobotCA https://github.com/ROS-Mobile/ROS-Mobile-Android…...
二十章:基于弱监督语义分割的亲和注意力图神经网络
0.摘要 弱监督语义分割因其较低的人工标注成本而受到广泛关注。本文旨在解决基于边界框标注的语义分割问题,即使用边界框注释作为监督来训练准确的语义分割模型。为此,我们提出了亲和力注意力图神经网络(A2GNN)。按照先前的做法&a…...

webpack5 学习之路
1.视频 01-课程介绍_哔哩哔哩_bilibili 2.配套资料 依赖环境 | 尚硅谷 Web 前端之 Webpack5 教程 3.webpack 官方文档 入口起点(entry points) | webpack 中文文档 4.vue cli 官方文档 介绍 | Vue CLI 挖矿:Coding Tree...

VSCode C++ 调试方法
VSCode 调试 C 主要就是 .vscode 中的 launch.json 和 tasks.json 的配置。 launch.json 可以通过 vscode 界面 ——》左侧调试功能按钮——》创建 launch.json ——》C(GDB/LLDB)生成。 其中 launch.json 默认配置如下,主要配置项说明&…...

Java设计模式-命令模式
命令模式 1.命令模式含义 命令模式,将一个请求封装为一个对象,从而使你可用不同的请求对客户进行参数化。对请求排队或记录请求日志,以及支持可撤销的操作。 命令模式乍一看,有点懵懵的。即使这个定义看完,也是不明…...

Linux编译宏BUILD_BUG_ON_ZERO
本系列文章主要写我在阅读Linux内核过程中,关注的比较难以理解但又设计巧妙的代码片段(不关注OS的各个模块的设计思想,此部分我准备写在“深入理解Linux Kernel”系列文章中),一来通过内核代码复习一下C语言及汇编语言…...

从Arweave开始:4EVERLAND存储签入挑战开始
嗨,4evers, 今天,我们热烈欢迎您参加 Galxe 上的 4EVERLAND “Arweave 入门”活动。这是一项长期的重头活动,所有参与的用户都有机会获得相应的奖励。 Arweave 是一种革命性的去中心化存储协议,为寻求安全可靠的有价…...
数据结构—链表
链表 前言链表链表的概念及结构链表的分类 无头单向非循环链表的相关实现带头双向循环链表的相关实现顺序表和链表(带头双向循环链表)的区别 前言 顺序表是存在一些固有的缺陷的: 中间/头部的插入删除,时间复杂度为O(N)…...
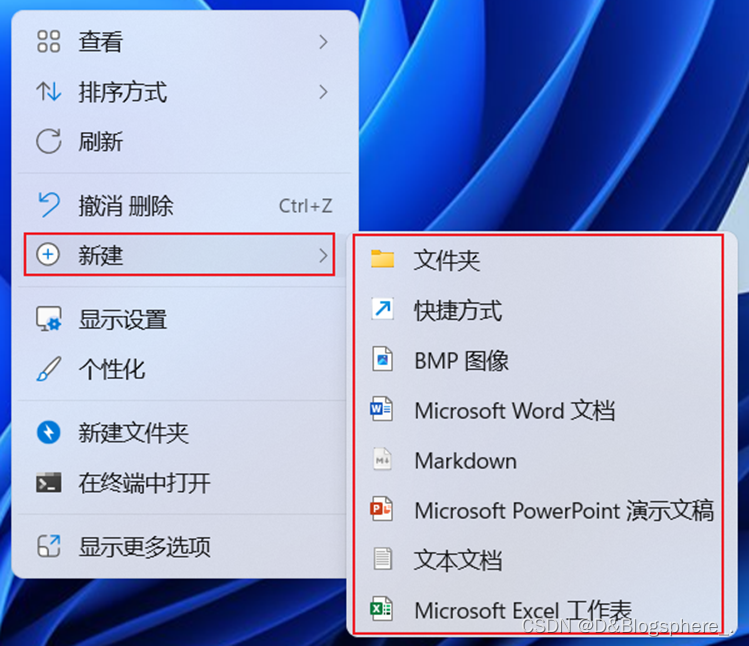
windows 10/11 修改右键新建菜单
问题:修改右键新建菜单内容 解决方法:使用软件ShellNew Settings 1.打开软件 2.根据需要取消勾选项 3.最终效果...

6.修饰符
文章目录 6.1 在一个静态方法内调用一个非静态成员为什么是非法的?6.2 静态方法和实例方法有何不同 6.1 在一个静态方法内调用一个非静态成员为什么是非法的? 由于静态方法可以不通过对象进行调用,因此在静态方法里,不能调用其他非静态变量࿰…...
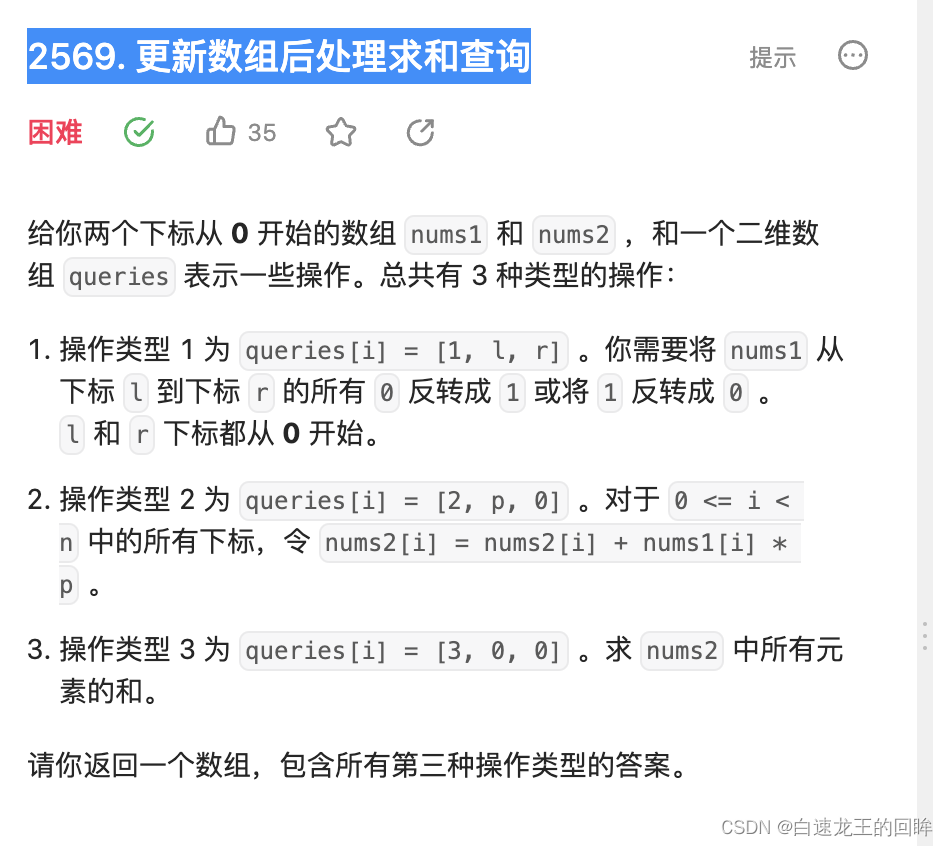
【leetcode难题】2569. 更新数组后处理求和查询【线段树实现01翻转和区间求和模版】
题目截图 题目分析 关键就是记录每次操作2时,nums1中的1的个数这就需要实现线段树进行区间反转以及区间求和 ac code class Solution:def handleQuery(self, nums1: List[int], nums2: List[int], queries: List[List[int]]) -> List[int]:n len(nums1)m le…...
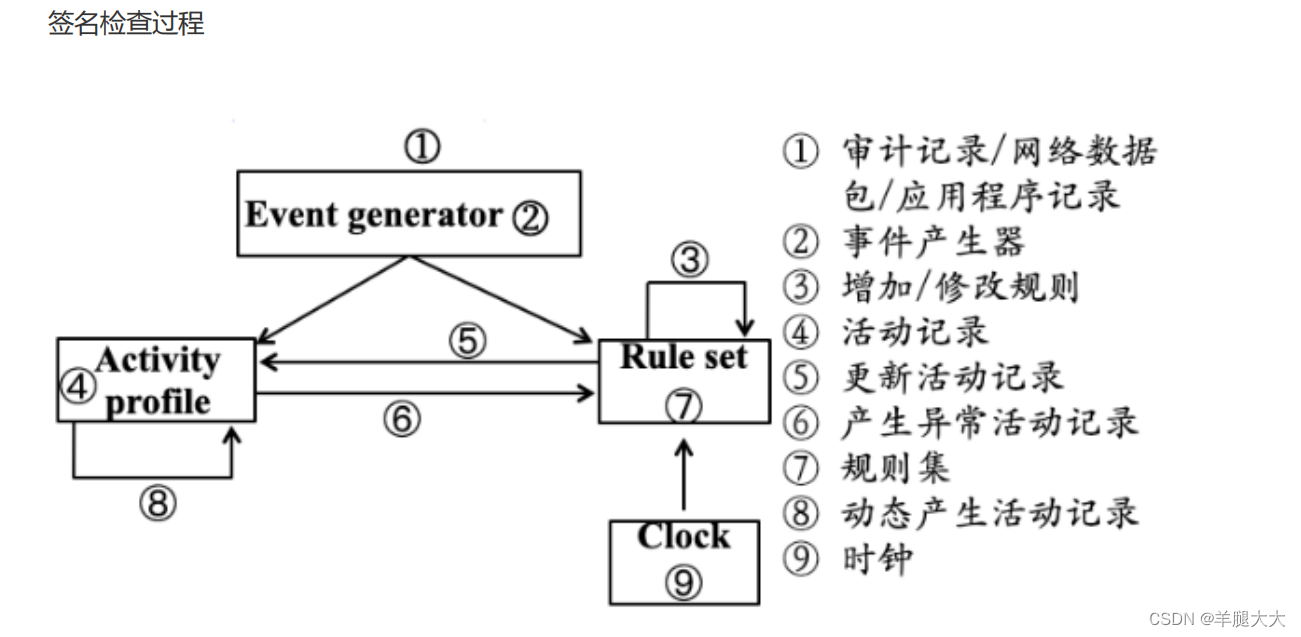
练习时长两年半的入侵检测
计算机安全的三大中心目标是:保密性 (Conf idential ity) 、完整性 (Integrity) 、可用性 (Availability) 。 身份认证与识别、访问控制机制、加密技术、防火墙技术等技术共同特征就是集中在系统的自身加固和防护上,属于静态的安全防御技术,…...
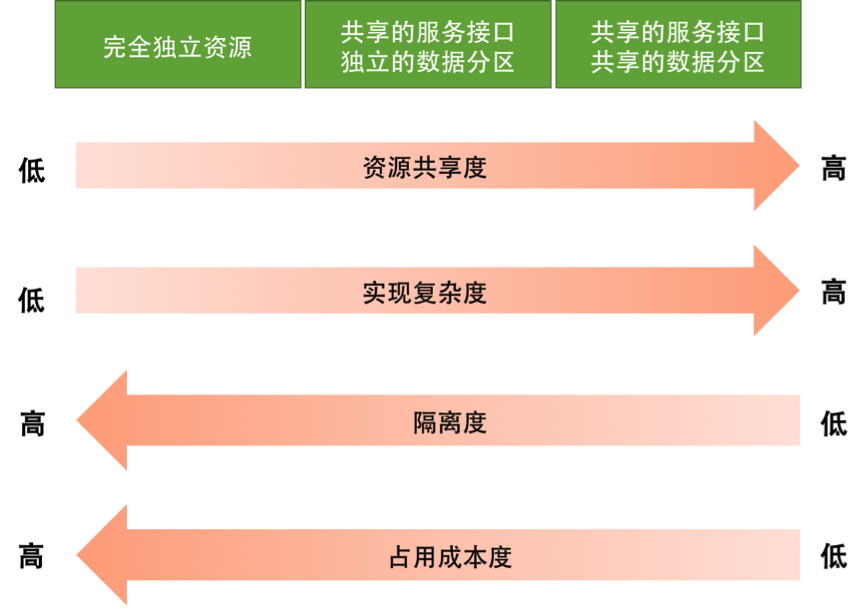
【弹力设计篇】聊聊隔离设计
为什么需要隔离设计 隔离其实就是Bulkheads,隔板。在生活中隔板的应用主要在船舱中进行设计,目的是为了避免因一处漏水导致整个船都沉下去。可以将故障减少在一定的范围内,而不是整个船体。 从架构演变来说的话,大多数系统都是从…...

MFC 透明窗体
如何制作透明窗体 ????? 使用SetLayeredWindowAttributes可以方便的制作透明窗体,此函数在w2k以上才支持,而且如果希望直接使用的话,可能需要下载最新的SDK。不过此函数在w2k的user32.dll里有实…...

C++笔记之vector的resize()和clear()用法
C笔记之vector的resize()和clear()用法 code review! 文章目录 C笔记之vector的resize()和clear()用法1.resize()2.clear() 1.resize() 运行 2.clear() 运行...
Vue2基础九、路由
零、文章目录 Vue2基础九、路由 1、单页应用 (1)单页应用是什么 单页面应用(SPA:Single Page Application): 所有功能在 一个html页面 上实现具体示例: 网易云音乐 https://music.163.com/ (2)单页面应用VS多页面…...

移动零——力扣283
题目描述 双指针 class Solution{ public:void moveZeroes(vector<int>& nums){int n nums.size(), left0, right0;while(right<n){if(nums[right]){swap(nums[right], nums[left]);left;}right;}} };...
Transformer+MIA Future Work
TransformerMIA Future Work 主要的挑战和未来发展分为三个部分,即 1、特征集成和计算成本降低、 2、数据增强和数据集收集、 3、学习方式和模态-对象分布 1、特征集成和计算成本降低 为了同时捕获局部和全局特征来提高模型性能,目前大多数工作只是…...

深度学习入门(二):神经网络整体架构
一、前向传播 作用于每一层的输入,通过逐层计算得到输出结果 二、反向传播 作用于网络输出,通过计算梯度由深到浅更新网络参数 三、整体架构 层次结构:逐层变换数据 神经元:数据量、矩阵大小(代表输入特征的数量…...

rust 配置
rustup 镜像 在 cmd 中输入以下代码,设置环境变量 setx RUSTUP_UPDATE_ROOT https://mirrors.tuna.tsinghua.edu.cn/rustup/rustup setx RUSTUP_DIST_SERVER https://mirrors.tuna.tsinghua.edu.cn/rustupcrates.io 索引镜像 在 C:\Users\用户名\.cargo\config 文…...

千亿镁合金产业集群正在成形:成都、抚州、池州的新版图
一个新赛道的地理坐标 如果要在中国地图上标注一条正在成形的新兴产业集群走廊,高强镁合金这条线,值得被认真画出来。 成都龙泉驿——江西抚州临川——安徽池州高新区,三个坐标,三条生产线,一家公司,两年内…...

179个核心职位,50个公司分类,中国大模型产业全栈
最后 对于正在迷茫择业、想转行提升,或是刚入门的程序员、编程小白来说,有一个问题几乎人人都在问:未来10年,什么领域的职业发展潜力最大? 答案只有一个:人工智能(尤其是大模型方向)…...

claude code用户如何迁移到taotoken解决封号与token不足问题
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Claude Code 用户如何迁移到 Taotoken 解决封号与 Token 不足问题 应用场景类,针对 Claude Code 用户常遇封号与 Token…...

如何深度定制索尼相机:Sony-PMCA-RE逆向工程工具完整指南
如何深度定制索尼相机:Sony-PMCA-RE逆向工程工具完整指南 【免费下载链接】Sony-PMCA-RE Reverse Engineering Sony Digital Cameras 项目地址: https://gitcode.com/gh_mirrors/so/Sony-PMCA-RE 索尼相机逆向工程工具Sony-PMCA-RE是一款专业的开源工具&…...

LDBlockShow实战指南:基因组连锁不平衡分析与可视化解决方案
LDBlockShow实战指南:基因组连锁不平衡分析与可视化解决方案 【免费下载链接】LDBlockShow LDBlockShow: a fast and convenient tool for visualizing linkage disequilibrium and haplotype blocks based on VCF files 项目地址: https://gitcode.com/gh_mirror…...
提升你的图表专业度?)
从科研图表到商业报表:如何用Matplotlib的legend()提升你的图表专业度?
从科研图表到商业报表:如何用Matplotlib的legend()提升你的图表专业度? 在数据驱动的决策时代,图表不仅是科研论文中的证据载体,更是商业汇报中的说服工具。我曾见证一位生物统计学家将同一组临床试验数据呈现给三种不同受众&…...

收藏干货|2026 版双非零基础入局大模型开发,RAG 与 Agent 就业上岸全攻略
日常总能收到不少初学伙伴的私信,大家普遍都有同一个疑惑:二本及普通院校学历,零基础入门 RAG、Agent 大模型应用开发,究竟能不能顺利入职?行业后续发展前景又如何? 本篇 2026 年全新内容,不空谈…...

别再只会用--nogpgcheck了!手把手教你安全修复PostgreSQL yum源的GPG密钥问题
企业级PostgreSQL部署:安全解决GPG密钥验证的完整方案 当你在生产环境中部署PostgreSQL时,遇到GPG签名验证错误直接使用--nogpgcheck绕过检查,就像因为门锁打不开就直接把门拆掉一样危险。本文将带你深入理解GPG验证机制,并提供一…...

基于BLE模块的低功耗无线遥控器设计与实现
1. 项目概述:基于BLE模块的无线遥控器设计与实现几年前,我在捣鼓智能家居时,一直想找一个低功耗、响应快、又能自己完全掌控的无线遥控方案。市面上的成品要么协议封闭,要么功耗感人,要么延迟高得让人着急。后来&#…...

SHAP原理与特征贡献解析
SHAP(SHapley Additive exPlanations)是一种基于博弈论中Shapley值的模型解释方法,它为机器学习模型的预测提供了一种统一、理论完备的特征归因框架。其核心思想是将模型的预测值视为所有特征协同合作的“总收益”,然后公平地分配…...