Easy Glide
题意:给出起点终点坐标,然后给出可以经过的几个点,未经过这几个点的时候以v1的速度前进,一旦经过这些点就可以在3秒内以v2的速度前进,3秒之后恢复v1,问从起点到终点所需的最短时间
思路:最短路模型没什么好说的,如果采用邻接表方式存图建边会比较麻烦,很遗憾我就是用的邻接表,注意从起点出发的点只能以v1的速度前进
ac代码:
#include<bits/stdc++.h>
#define endl '\n'
#define ll long long
#define INF 0x3f3f3f3f
#define pb push_back
#define int long long
#define Mirai ios::sync_with_stdio(0),cin.tie(0),cout.tie(0);
using namespace std;
typedef pair<int,int> pii;
const int N=1010;
pii _point[N];
int n;
double dist[N];
bool vis[N];
pii _start,_end;
vector<pair<int,double>> g[N];
double v1,v2;
double getdist(int sx,int sy,int tx,int ty)
{return sqrt((sx-tx)*(sx-tx)+(sy-ty)*(sy-ty));
}
double gettime(pii a,pii b,bool isv2)//isv2代表是否加速
{double len=getdist(a.first,a.second,b.first,b.second);double time;if(isv2){time=len/v2;if(time>3)time=3+(time-3)*v2/v1;}else time=len/v1;return time;
}
void dij()
{priority_queue<pair<double,int>,vector<pair<double,int>>,greater<pair<double,int>>> q;dist[n]=0;q.push({dist[n],n});while(q.size()){int u=q.top().second;q.pop();if(vis[u])continue;vis[u]=true;for(auto [v,w]:g[u]){if(dist[v]>dist[u]+w){dist[v]=dist[u]+w;q.push({dist[v],v});}}}
}
void solve()
{cin>>n;for(int i=0;i<=n+1;i++)dist[i]=1e9;for(int i=0;i<n;i++)cin>>_point[i].first>>_point[i].second;//将0加速点到n-1加速点的坐标存下来cin>>_start.first>>_start.second>>_end.first>>_end.second;//起点和终点的坐标cin>>v1>>v2;//假设起点为n,终点为n+1for(int i=0;i<n;i++){for(int j=0;j<n;j++)//对于每个加速点都向其他加速点以连一条边{g[i].pb({j,gettime(_point[i],_point[j],true)});}g[i].pb({n+1,gettime(_point[i],_end,true)});//再从每个点向终点连一条边}for(int i=0;i<n;i++)//从起点处发的边都是未加速的{g[n].pb({i,gettime(_start,_point[i],false)});//从起点向每个加速点连一条边}g[n].pb({n+1,gettime(_start,_end,false)});//从起点到终点连一条边dij();printf("%.12lf\n",dist[n+1]);
}
signed main()
{Mirai;int T=1;// cin>>T;while(T--){solve();}
}相关文章:

Easy Glide
题意:给出起点终点坐标,然后给出可以经过的几个点,未经过这几个点的时候以v1的速度前进,一旦经过这些点就可以在3秒内以v2的速度前进,3秒之后恢复v1,问从起点到终点所需的最短时间 思路:最短路…...
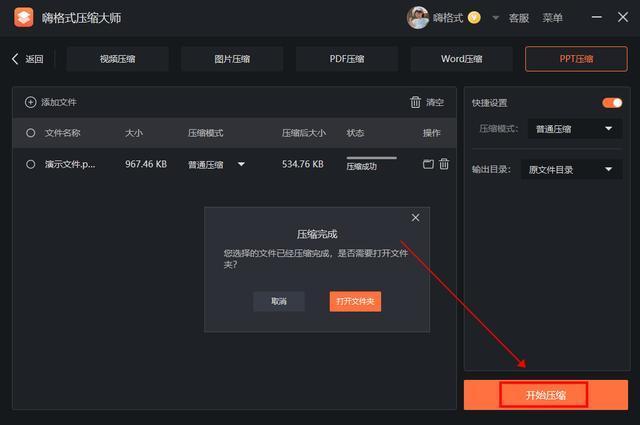
ppt怎么压缩到10m以内?分享好用的压缩方法
PPT是一种常见的演示文稿格式,有时候文件过大,我们会遇到无法发送、上传的现象,这时候简单的解决方法就是压缩其大小,那怎么才能将PPT压缩到10M以内呢? PPT文件大小受到影响的主要因素就是以下几点: 1、图…...

VBA技术资料MF35:VBA_在Excel中过滤数据
【分享成果,随喜正能量】好马好在腿,好人好在嘴。不会烧香得罪神,不会讲话得罪人。慢慢的你就会发现,一颗好心,永远比不上一张好嘴。。 我给VBA的定义:VBA是个人小型自动化处理的有效工具。利用好了&#…...
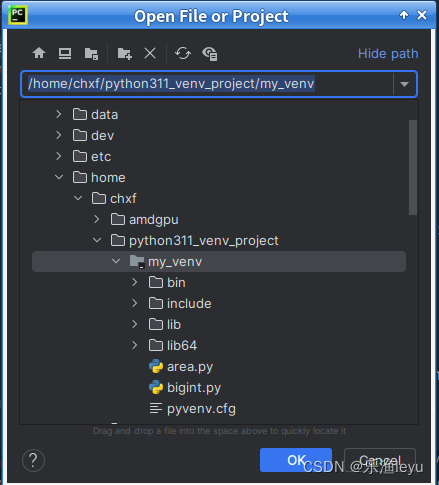
Debian12中为python3配置虚拟环境及在Pycharm中使用虚拟环境
在Debian 12中,python默认为python 3.11。 基于应用,现需设置虚拟环境。 1.安装venv模块 从python3.3开始,配置python虚拟环境,可用venv模块,更加方便了。 执行命令: #apt install python3.11-venv 2.…...
android app控制ros机器人一
android开发app,进而通过控制ros机器人,记录开发过程 查阅资料: rosjava使用较多,已经开发好的app也有开源的案例 rosjava GitHub https://github.com/ros-autom/RobotCA https://github.com/ROS-Mobile/ROS-Mobile-Android…...
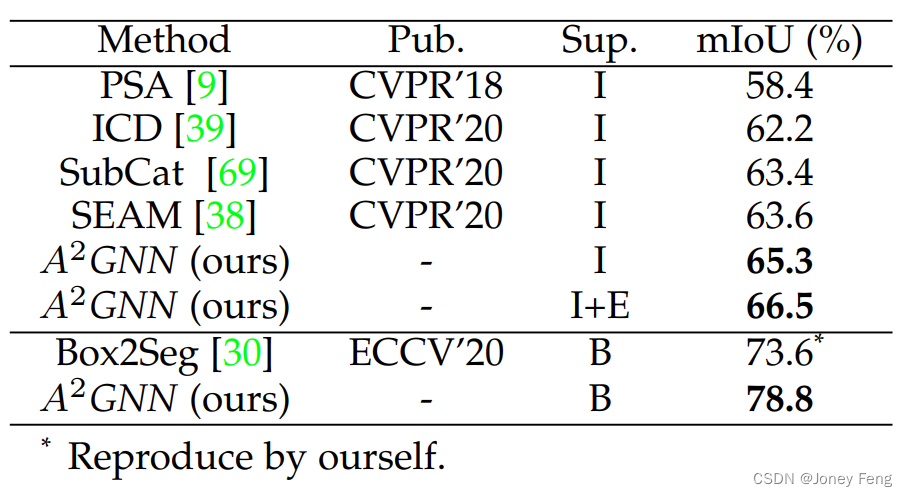
二十章:基于弱监督语义分割的亲和注意力图神经网络
0.摘要 弱监督语义分割因其较低的人工标注成本而受到广泛关注。本文旨在解决基于边界框标注的语义分割问题,即使用边界框注释作为监督来训练准确的语义分割模型。为此,我们提出了亲和力注意力图神经网络(A2GNN)。按照先前的做法&a…...

webpack5 学习之路
1.视频 01-课程介绍_哔哩哔哩_bilibili 2.配套资料 依赖环境 | 尚硅谷 Web 前端之 Webpack5 教程 3.webpack 官方文档 入口起点(entry points) | webpack 中文文档 4.vue cli 官方文档 介绍 | Vue CLI 挖矿:Coding Tree...

VSCode C++ 调试方法
VSCode 调试 C 主要就是 .vscode 中的 launch.json 和 tasks.json 的配置。 launch.json 可以通过 vscode 界面 ——》左侧调试功能按钮——》创建 launch.json ——》C(GDB/LLDB)生成。 其中 launch.json 默认配置如下,主要配置项说明&…...

Java设计模式-命令模式
命令模式 1.命令模式含义 命令模式,将一个请求封装为一个对象,从而使你可用不同的请求对客户进行参数化。对请求排队或记录请求日志,以及支持可撤销的操作。 命令模式乍一看,有点懵懵的。即使这个定义看完,也是不明…...

Linux编译宏BUILD_BUG_ON_ZERO
本系列文章主要写我在阅读Linux内核过程中,关注的比较难以理解但又设计巧妙的代码片段(不关注OS的各个模块的设计思想,此部分我准备写在“深入理解Linux Kernel”系列文章中),一来通过内核代码复习一下C语言及汇编语言…...

从Arweave开始:4EVERLAND存储签入挑战开始
嗨,4evers, 今天,我们热烈欢迎您参加 Galxe 上的 4EVERLAND “Arweave 入门”活动。这是一项长期的重头活动,所有参与的用户都有机会获得相应的奖励。 Arweave 是一种革命性的去中心化存储协议,为寻求安全可靠的有价…...
数据结构—链表
链表 前言链表链表的概念及结构链表的分类 无头单向非循环链表的相关实现带头双向循环链表的相关实现顺序表和链表(带头双向循环链表)的区别 前言 顺序表是存在一些固有的缺陷的: 中间/头部的插入删除,时间复杂度为O(N)…...
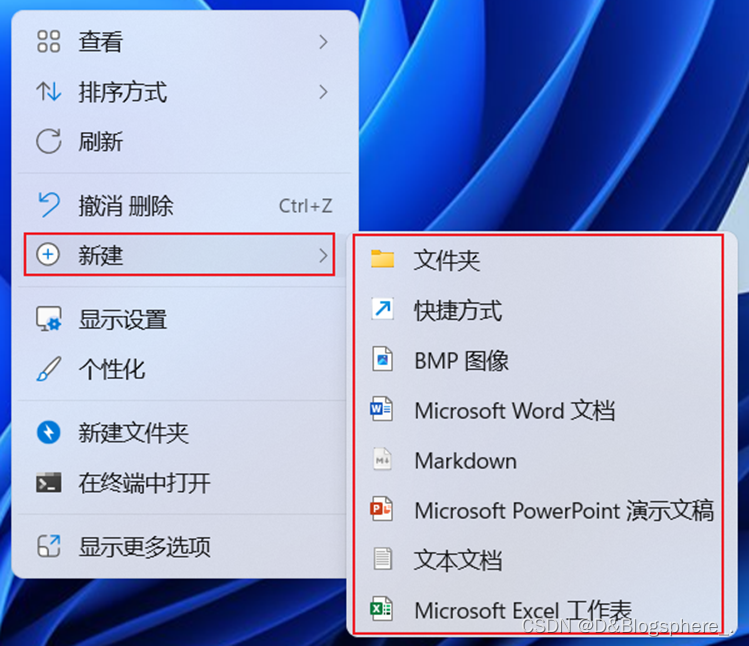
windows 10/11 修改右键新建菜单
问题:修改右键新建菜单内容 解决方法:使用软件ShellNew Settings 1.打开软件 2.根据需要取消勾选项 3.最终效果...

6.修饰符
文章目录 6.1 在一个静态方法内调用一个非静态成员为什么是非法的?6.2 静态方法和实例方法有何不同 6.1 在一个静态方法内调用一个非静态成员为什么是非法的? 由于静态方法可以不通过对象进行调用,因此在静态方法里,不能调用其他非静态变量࿰…...
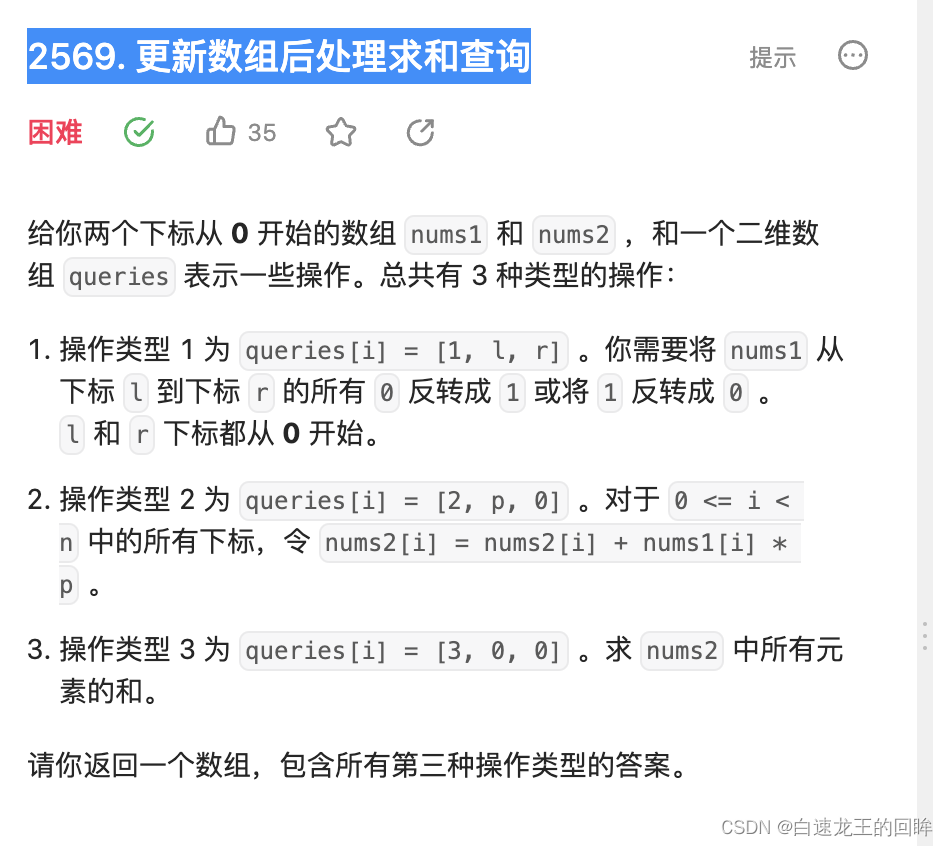
【leetcode难题】2569. 更新数组后处理求和查询【线段树实现01翻转和区间求和模版】
题目截图 题目分析 关键就是记录每次操作2时,nums1中的1的个数这就需要实现线段树进行区间反转以及区间求和 ac code class Solution:def handleQuery(self, nums1: List[int], nums2: List[int], queries: List[List[int]]) -> List[int]:n len(nums1)m le…...
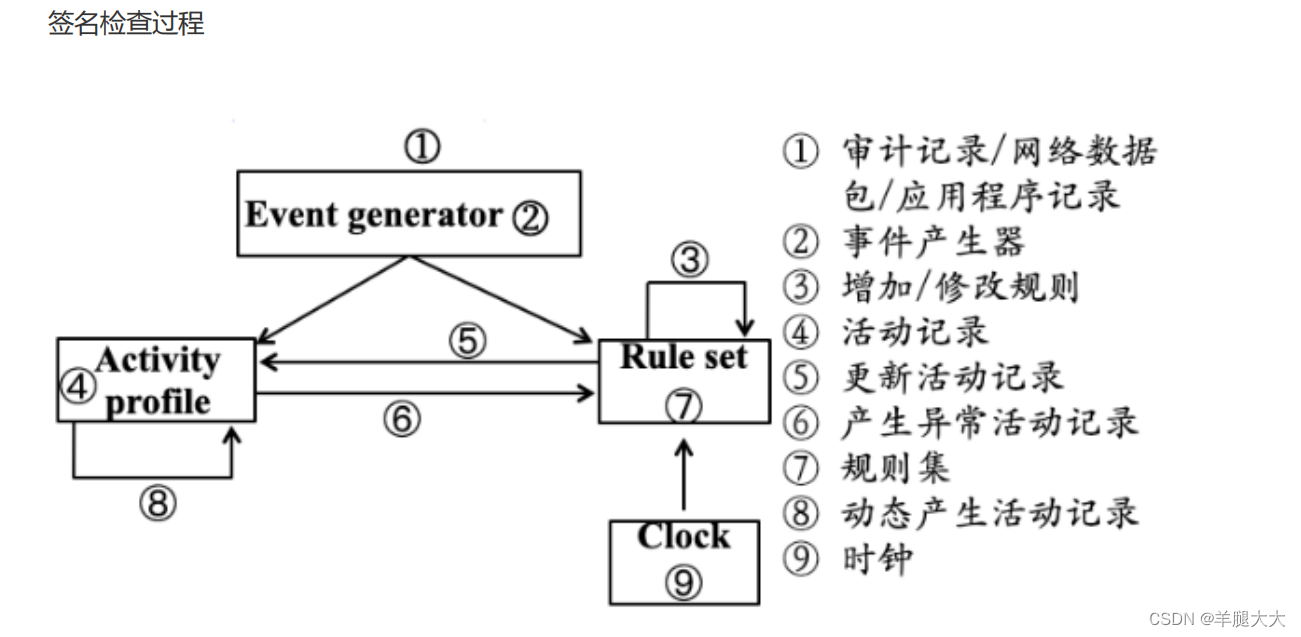
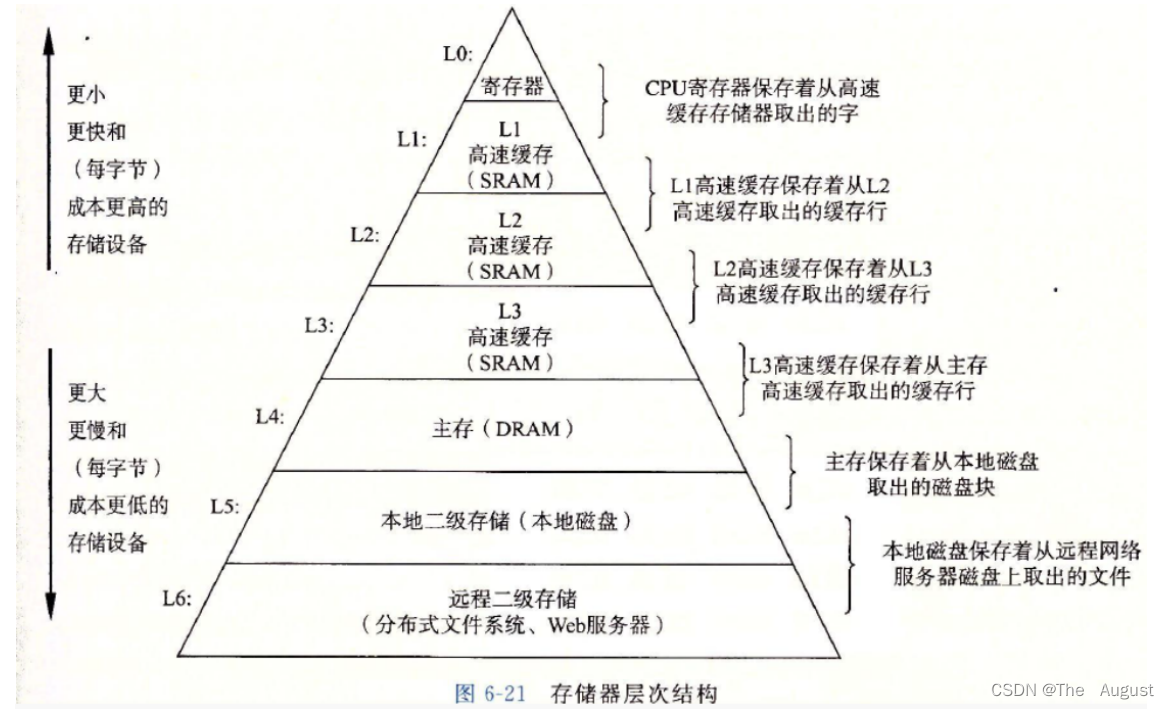
练习时长两年半的入侵检测
计算机安全的三大中心目标是:保密性 (Conf idential ity) 、完整性 (Integrity) 、可用性 (Availability) 。 身份认证与识别、访问控制机制、加密技术、防火墙技术等技术共同特征就是集中在系统的自身加固和防护上,属于静态的安全防御技术,…...
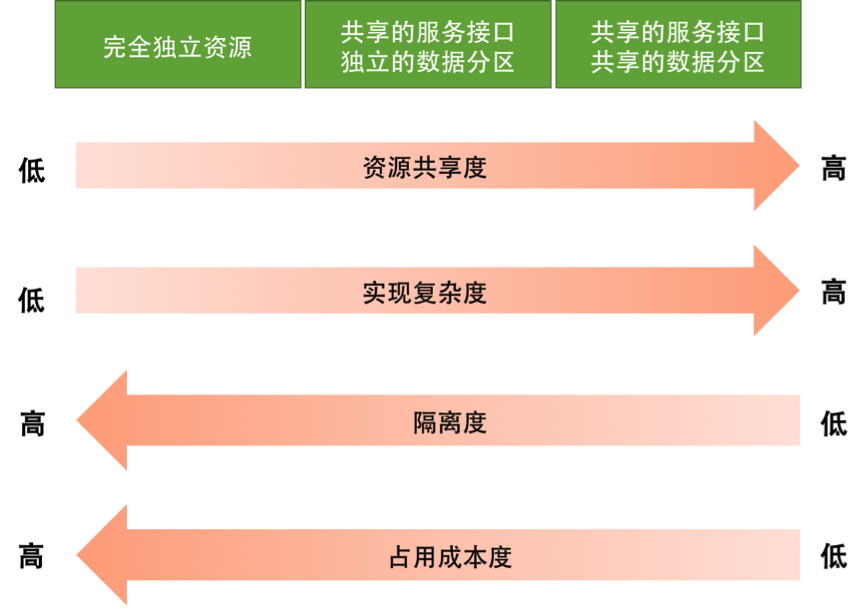
【弹力设计篇】聊聊隔离设计
为什么需要隔离设计 隔离其实就是Bulkheads,隔板。在生活中隔板的应用主要在船舱中进行设计,目的是为了避免因一处漏水导致整个船都沉下去。可以将故障减少在一定的范围内,而不是整个船体。 从架构演变来说的话,大多数系统都是从…...

MFC 透明窗体
如何制作透明窗体 ????? 使用SetLayeredWindowAttributes可以方便的制作透明窗体,此函数在w2k以上才支持,而且如果希望直接使用的话,可能需要下载最新的SDK。不过此函数在w2k的user32.dll里有实…...

C++笔记之vector的resize()和clear()用法
C笔记之vector的resize()和clear()用法 code review! 文章目录 C笔记之vector的resize()和clear()用法1.resize()2.clear() 1.resize() 运行 2.clear() 运行...
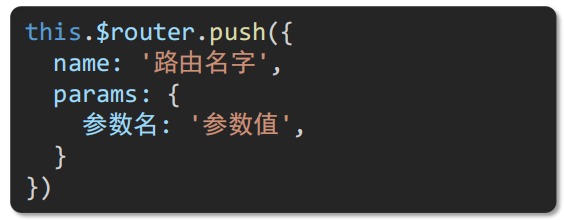
Vue2基础九、路由
零、文章目录 Vue2基础九、路由 1、单页应用 (1)单页应用是什么 单页面应用(SPA:Single Page Application): 所有功能在 一个html页面 上实现具体示例: 网易云音乐 https://music.163.com/ (2)单页面应用VS多页面…...

Unity Il2CppDumper原理与实战:解析元数据与二进制对齐
1. 这不是“破解工具”,而是Unity开发者该懂的二进制真相课 你刚在Unity Asset Store下载了一个功能惊艳的插件,却在打包iOS后发现部分逻辑失效;或者接手一个没有源码的旧项目,只有一堆 .dll 和 .so 文件,连主入口…...

Shiro RememberMe反序列化漏洞深度解析与实战利用
1. 这个漏洞不是“老古董”,而是理解Java安全边界的活教材很多人看到CVE-2016-4437,第一反应是“Shiro都淘汰了,还讲这个干啥?”——我去年在给一家做政企内部系统的客户做渗透复测时,就遇到过一个上线三年的审批平台&…...

AI时代程序员职业发展与个人创业可行性研究报告
一、行业宏观变革(2026核心趋势数据佐证) 1.1 开发范式已彻底重构(行业不可逆拐点) 2026年正式进入AI Agent智能体开发时代,传统CRUD编码价值持续崩塌。 核心权威数据: Gartner预测:2026年75%企…...
:数组排序、去重、查找)
数组专项(一):数组排序、去重、查找
大家好,欢迎来到《算法面试60讲(2026最新版全真题带解析)》第19篇!上一篇我们彻底吃透了字符串专项的核心难点——BF暴力匹配与KMP高效匹配算法,搞定了字符串模块面试最难的算法考点。从本节课开始,我们正式进入算法面试第一高频模块:数组专项。 在算法面试中,数组是出…...

SSE 基础知识
SSE 基础知识 一、概念定义 SSE 全称 Server-Sent Events,是基于HTTP协议的服务器单向数据推送技术。 建立一次长连接后,服务端可主动持续向前端推送数据,无需客户端反复轮询请求。 二、核心特点 单向通信:仅服务器 → 客户端发送…...

Veo 2胶片质感生成器失效?——深度解析Color Science v2.3内核中被屏蔽的Cinematic Grain Injection层
更多请点击: https://kaifayun.com 第一章:Veo 2胶片质感生成器失效现象全景透视 近期大量用户反馈,Veo 2 胶片质感生成器在调用 generate_film_effect() 接口后返回空纹理、纯灰帧或 HTTP 503 Service Unavailable 错误,且该问题…...

MAX78000移植Zephyr RTOS实战:从BSP创建到AI边缘设备开发
1. 项目概述与动机作为一名长期在嵌入式边缘AI和机器人领域摸爬滚打的开发者,我最近把目光投向了一块相当有潜力的板子:Maxim Integrated(现为ADI一部分)的MAX78000FTHR开发套件。这块板子的核心——MAX78000微控制器,…...

钱钟书《围城》第1-5章阅读笔记:一场关于人生困境的提前预演
前言 钱钟书先生的《围城》被誉为"新儒林外史",是中国现代文学史上风格独特的讽刺经典。这部创作于20世纪40年代的长篇小说,以抗战初期为背景,通过主人公方鸿渐的人生轨迹,深刻揭示了知识分子群体的精神困境与人性弱点。…...

电容损坏深度诊断,从外观到 ESR精准区分容衰与漏电
在 PCB 故障中,电容损坏占比超 40%,是当之无愧的 “头号杀手”。很多工程师仅靠 “鼓包漏液” 判断电容好坏,殊不知80% 的电容损坏是隐性的—— 外观平整但容值衰减、ESR 升高、轻微漏电,导致供电不稳、系统重启、噪声增大&#x…...
)
别再死磕USB HID了!用ESP32的Arduino框架手把手教你实现蓝牙鼠标键盘(附完整代码)
ESP32蓝牙HID实战:零基础打造自定义键盘鼠标 手里那块吃灰的ESP32开发板终于能派上用场了!上周我用它做了个无线演示控制器,在会议室里走着就能翻PPT,同事们都问是怎么实现的。其实秘诀就在于ESP32的蓝牙HID功能——不需要任何USB…...