FSM:Full Surround Monodepth from Multiple Cameras
参考代码:None
介绍
深度估计任务作为基础环境感知任务,在基础上构建的3D感知才能更加准确,并且泛化能力更强。单目的自监督深度估计已经有MonoDepth、ManyDepth这些经典深度估计模型了,而这篇文章是对多目自监督深度估计进行探索,在单目自监督深度估计基础上利用多目相机之间相互约束构建了多目自监督深度估计方法。具体为,在该方法中每个相机会预测自身深度图和位姿信息,依靠相机之间视角重叠关系、自身运动位姿、深度估计结果构建自监督损失,多目视角的使用主要用于约束各个视角下生成的位姿,而且正是由于使用了外参数使得网络具备了真实距离的感知能力。
方法设计
使用spatial-temporal的自监督深度估计
在单目深度估计任务中依靠不同时序下的成像结果构建光度重构误差,其典型形式为:
L p ( I t , I ^ t ) = α 1 − S S I M ( I t , I ^ t ) 2 + ( 1 − α ) ∣ ∣ I t − I ^ t ∣ ∣ L_p(I_t,\hat{I}_t)=\alpha\frac{1-SSIM(I_t,\hat{I}_t)}{2}+(1-\alpha)||I_t-\hat{I}_t|| Lp(It,I^t)=α21−SSIM(It,I^t)+(1−α)∣∣It−I^t∣∣
其中, I ^ t \hat{I}_t I^t是通过估计出来的位姿和深度估计warp之后得到的,其warp的过程记为:
p ^ t = π ( R ^ t → c ϕ ( p t , d ^ t , K ) + t ^ t → c , K ) \hat{p}^t=\pi(\hat{R}^{t\rightarrow c}\phi(p^t,\hat{d}^t,K)+\hat{t}^{t\rightarrow c},K) p^t=π(R^t→cϕ(pt,d^t,K)+t^t→c,K)
而在多目系统下除了能够像单目系统那样使用时序信息之外,还可以将空间信息引入(因为多目系统的相邻两个相机之间多存在重叠视角),或者将空间和时序信息混合使用(也就是当前帧经过时序warp之后在进行空间warp)。在下图中展示了多目系统在不同时序和空间维度下的变换关系。
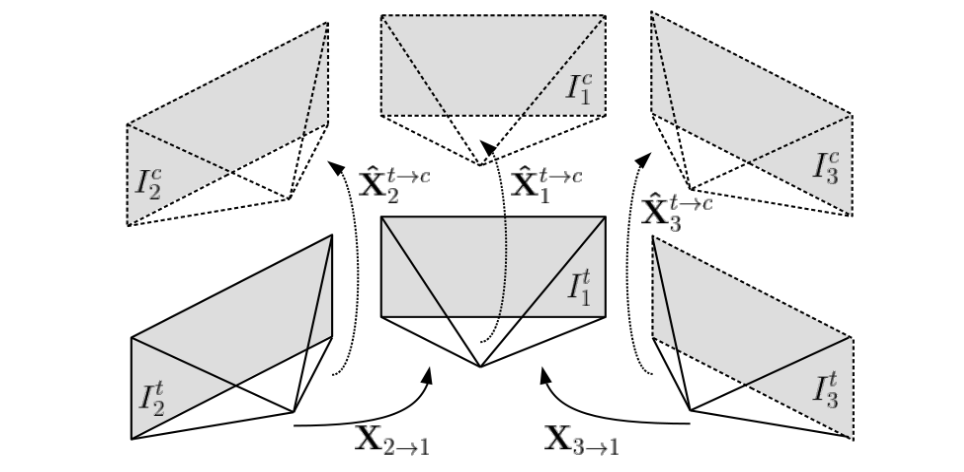
对于同时刻下可以依据相邻相机之前的内外参数将相机 i i i的图像映射到相机 j j j中去,也就是如下变换关系:
p ^ i = π j ( R i → j ϕ i ( p i , d ^ i ) + t i → j ) \hat{p}_i=\pi_j(R_{i\rightarrow j}\phi_i(p_i,\hat{d}_i)+t_{i\rightarrow j}) p^i=πj(Ri→jϕi(pi,d^i)+ti→j)
在不同时刻下可以通过估计出来的位姿投影到相同时刻下,则在该相同时刻下可以构建temporal-spatial关联:
p ^ i t = π j ( R i → j ( R ^ j t → c ϕ ( p j t , d ^ j t ) + t j t → c ) + t i → j ) \hat{p}_i^t=\pi_j(R_{i\rightarrow j}(\hat{R}_j^{t\rightarrow c}\phi(p_j^t,\hat{d}_j^t)+t_j^{t\rightarrow c})+t_{i\rightarrow j}) p^it=πj(Ri→j(R^jt→cϕ(pjt,d^jt)+tjt→c)+ti→j)
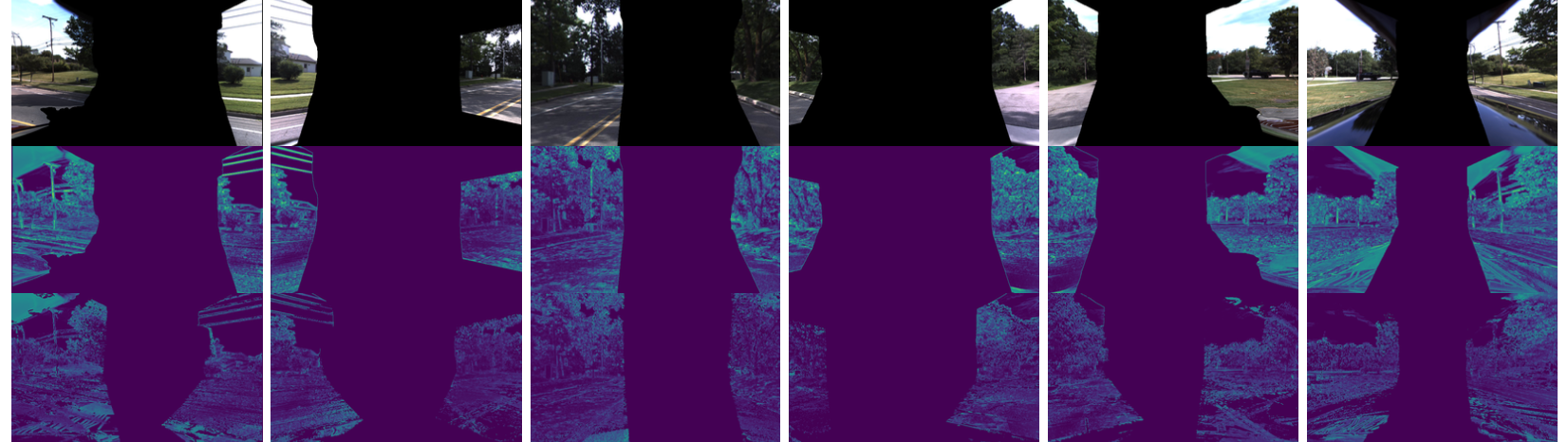
使用这样关联关系可以使得重叠区域产生更多的响应像素,见下图(最后一行为temporal-spatial方式得到的响应区域):
多目相机之间的位姿约束
由于算法中多目相机是各自单独预测位姿的,那么但是这些相机确是同处于一个运动系统中的,它们预先标定好的外参变换关系还是可以构建它们的约束关系的。则对于相邻的两个相机它们时序和空间上的对应约束为:
X ˉ i t → t + 1 = X j − 1 X i X ^ i t → t + 1 X i − 1 X j \bar{X}_i^{t\rightarrow t+1}=X_j^{-1}X_i\hat{X}_i^{t\rightarrow t+1}X_i^{-1}X_j Xˉit→t+1=Xj−1XiX^it→t+1Xi−1Xj
上面的公式建立了不同相机在时序和空间上的变换关系,不过需要注意的是上面的公式是存在问题的。它的原理应该是依据周围相机各自预测出来的位姿,通过标定好的外参将预测出来的位姿变换到目的相机下,这样约束目的相机本身位姿估计结果和变换位姿,也就是从平移和旋转两个分量上使得两者近似:
t l o s s = ∑ j = 2 N ∣ ∣ t ^ 1 t + 1 − t ˉ j t + 1 ∣ ∣ 2 t_{loss}=\sum_{j=2}^N||\hat{t}_1^{t+1}-\bar{t}_j^{t+1}||^2 tloss=j=2∑N∣∣t^1t+1−tˉjt+1∣∣2
旋转分量上(旋转角):
R l o s s = ∑ j = 2 N ∣ ∣ ϕ ^ 1 − ϕ ˉ 1 ∣ ∣ 2 + ∣ ∣ θ ^ 1 − θ ˉ 1 ∣ ∣ 2 + ∣ ∣ Φ ^ 1 − Φ ˉ 1 ∣ ∣ 2 R_{loss}=\sum_{j=2}^N||\hat{\phi}_1-\bar{\phi}_1||^2+||\hat{\theta}_1-\bar{\theta}_1||^2+||\hat{\Phi}_1-\bar{\Phi}_1||^2 Rloss=j=2∑N∣∣ϕ^1−ϕˉ1∣∣2+∣∣θ^1−θˉ1∣∣2+∣∣Φ^1−Φˉ1∣∣2
损失计算的mask
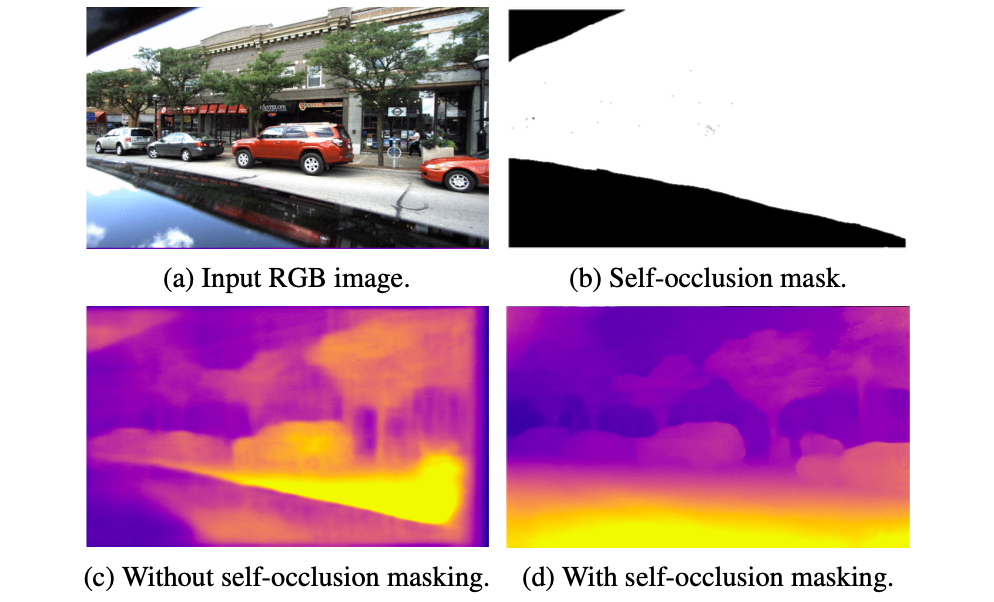
在损失计算时采用两种类型的mask:non-overlaping和self-occlusion。对于第一种mask是根据重构误差的有效区域确定的,则会在temporal(相同相机不同时序)和spatial(不同相机相同时序)下在mask的引导下得到光度重构误差。
对于第二种那就由于设备本身安放位置决定得了,在计算过程中排除那些自身部分,其效果见下图:
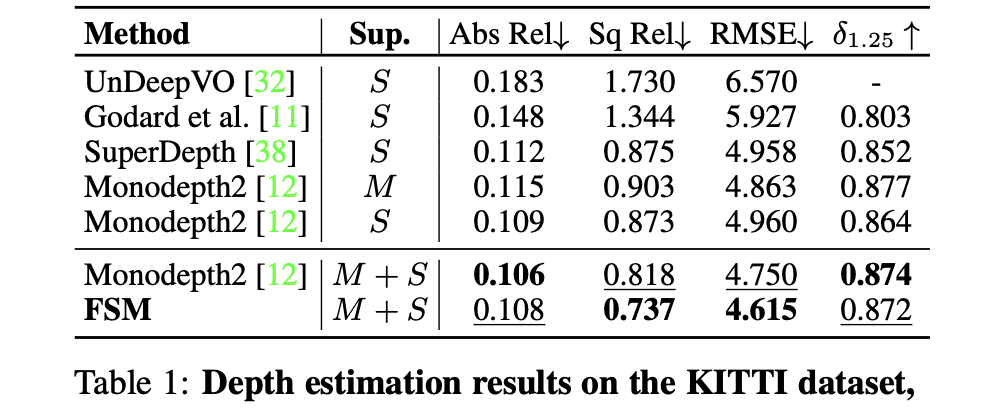
实验结果
KITTI数据集:
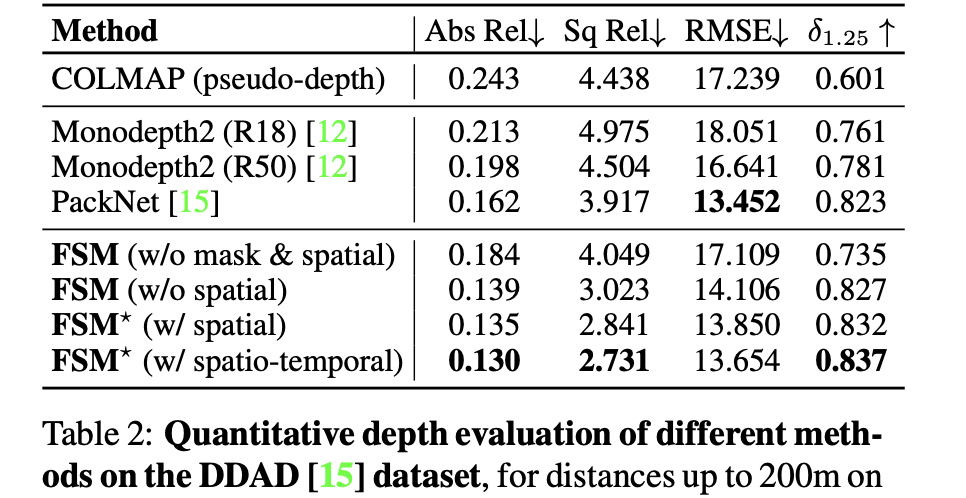
DDAD数据集:
相关文章:
FSM:Full Surround Monodepth from Multiple Cameras
参考代码:None 介绍 深度估计任务作为基础环境感知任务,在基础上构建的3D感知才能更加准确,并且泛化能力更强。单目的自监督深度估计已经有MonoDepth、ManyDepth这些经典深度估计模型了,而这篇文章是对多目自监督深度估计进行探…...
idea 安装 插件jrebel 报错LS client not configured.
这个报错找了好久,有博主说版本不对,我脑子没反应过来以为是随便换一个低版本的就行,没想到只能是2022.4.1 这个版本才行 一定要用jrebel 2022.4.1的插件版本!!!!! 插件下载地址&…...
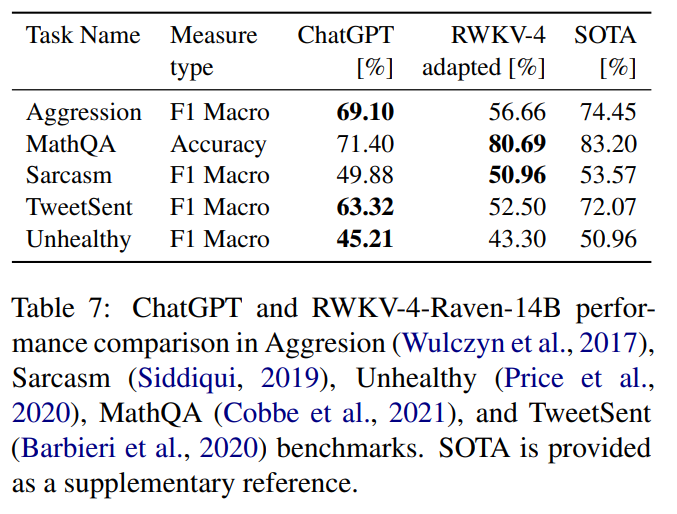
Raki的读paper小记:RWKV: Reinventing RNNs for the Transformer Era
Abstract&Introduction&Related Work 研究任务 基础模型架构已有方法和相关工作 RNN,CNN,Transformer稀疏注意力(Beltagy等人,2020年;Kitaev等人,2020年;Guo等人,2022年&am…...

PaddleOCR #PP-OCR常见异常扫雷
异常一:ModuleNotFoundError: No module named ‘tools.infer’ 实验案例: PaddleOCR #使用PaddleOCR进行光学字符识别(PP-OCR文本检测识别) 参考代码: 图片文本检测实验时,运行代码出现异常:M…...

Qt加载字体文件
本文记录如何使用 Qt 加载外部字体文件,并遍历字体名称和样式名称。 bool LoadFont(const QString& fontPath) {const int fontId QFontDatabase::addApplicationFont(fontPath);if (fontId -1) {return false;}// 遍历字体名和样式名 #if QT_VERSION > QT…...

3ds MAX绘制简单动画
建立一个长方体和茶壶: 在界面右下角点击时间配置: 这是动画制作的必要步骤 选择【自动】,接下来,我们只要在对应的帧改变窗口中图形的位置,就能自动记录该时刻的模样 这就意味着,我们通过电脑记录某几个…...

页面访问控制远程仓库
页面访问权限控制 什么是jwt身份认证 在前后端分离模式的开发中,服务器如何知道来访者的身份呢? 在登录后,服务器会响应给用户一个 令牌 (token)令牌中会包括该用户的id等唯一标识浏览器收到令牌后,自己…...
小程序 user agent stylesheet 覆盖了page下wxss背景色
如下图: login页面的page下的背景色,被:user agent stylesheet覆盖。 分析与解决: 1、user agent stylesheet是浏览器默认样式表,是浏览器默认样式。 2、不同浏览器的默认样式不同个,甚至同种浏览器不同版…...
)
Vue.js高阶学习和常用知识(二)
目录 1. Vue 实例2. 组件3. 指令4. 计算属性5. 监听器6. 生命周期钩子 Vue.js 是一个流行的 Web 前端框架,它由 Evan You 于 2014 年创建。Vue.js 的设计目标是简单、灵活和易于使用,同时具有高性能和可扩展性。 Vue.js 基于组件化的思想,将页…...

html实现蜂窝菜单
效果图 CSS样式 keyframes _fade-in_mkmxd_1 {0% {filter: blur(20px);opacity: 0}to {filter: none;opacity: 1} } keyframes _drop-in_mkmxd_1 {0% {transform: var(--transform) translateY(-100px) translateZ(400px)}to {transform: var(--transform)} } ._examples_mkmx…...

云原生训练营课程大纲
第一部分:Go 语****言基础 模块一:Go 语言特性 教学目标: 理解 Go 语言基本语法 理解 Go 语言常用数据类型 理解 Go 语言常用小技巧 深入理解 Go 语言的多线程编程 针对的用户痛点: 云原生从业者因为未熟练掌握 Go 语言&#…...

【Ajax】笔记-同源策略
同源策略(Same-Origin Policy),是浏览器的一种安全策略 同源(即url相同):协议、域名、端口号 必须完全相同。(请求是来自同一个服务) 跨域:违背了同源策略,即跨域。 ajax请求是遵循…...
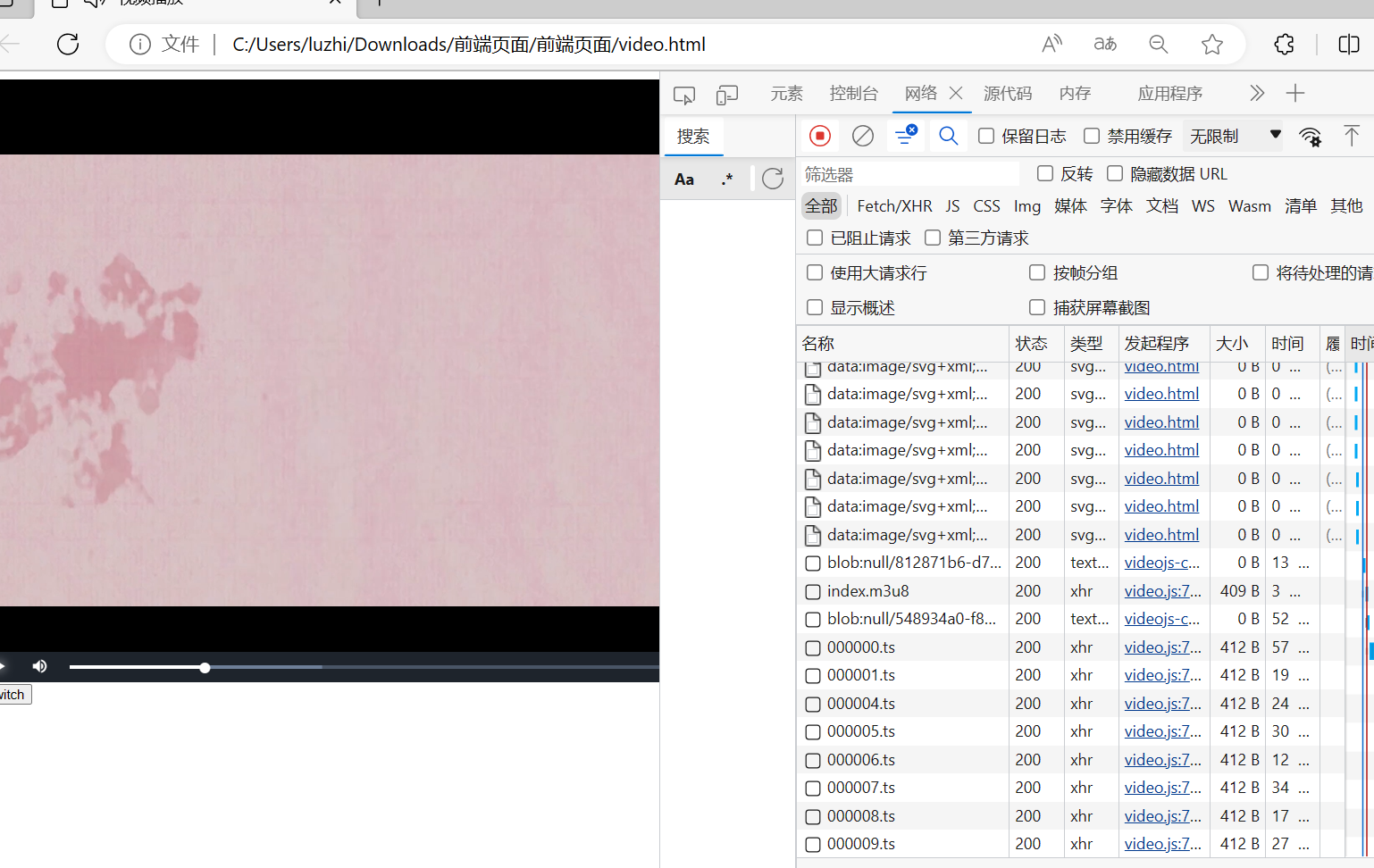
Java使用FFmpeg实现mp4转m3u8
Java使用FFmpeg实现mp4转m3u8 前言FFmpegM3U8 一、需求及思路分析二、安装FFmpeg1.windows下安装FFmpeg2.linux下安装FFmpegUbuntuCentOS 三、代码实现1.引入依赖2.修改配置文件3.工具类4.Controlle调用5.Url转换MultipartFile的工具类 四、播放测试1.html2.nginx配置3.效果展示…...
【JavaEE初阶】Servlet (三)MessageWall
在我们之前博客中写到的留言墙页面,有很严重的问题:(留言墙博客) 如果刷新页面/关闭页面重开,之前输入的消息就不见了.如果一个机器上输入了数据,第二个机器上是看不到的. 针对以上问题,我们的解决思如如下: 让服务器来存储用户提交的数据,由服务器保存. 当有新的浏览器打开页…...

D. Make It Round
在Berlandia发生了通货膨胀,所以商店需要改变商品的价格。 商品n的当前价格已经给出。允许将该商品的价格提高k倍,1≤k≤m,k为整数。输出商品的最圆的可能的新价格。也就是在最后有最大数量的零的那个。 例如,数字481000比数字1…...

Python网站页面开发HTML总结
Python网站页面开发HTML总结 一、HTML基础语法 1.HTML是什么? ●HTML是HyperText Mark-up Language的首字母简写,即超文本标记语言。 ●HTML不是一种编程语言,而是一种标记语言。 ●超文本指的是超链接,标记指的是标签…...
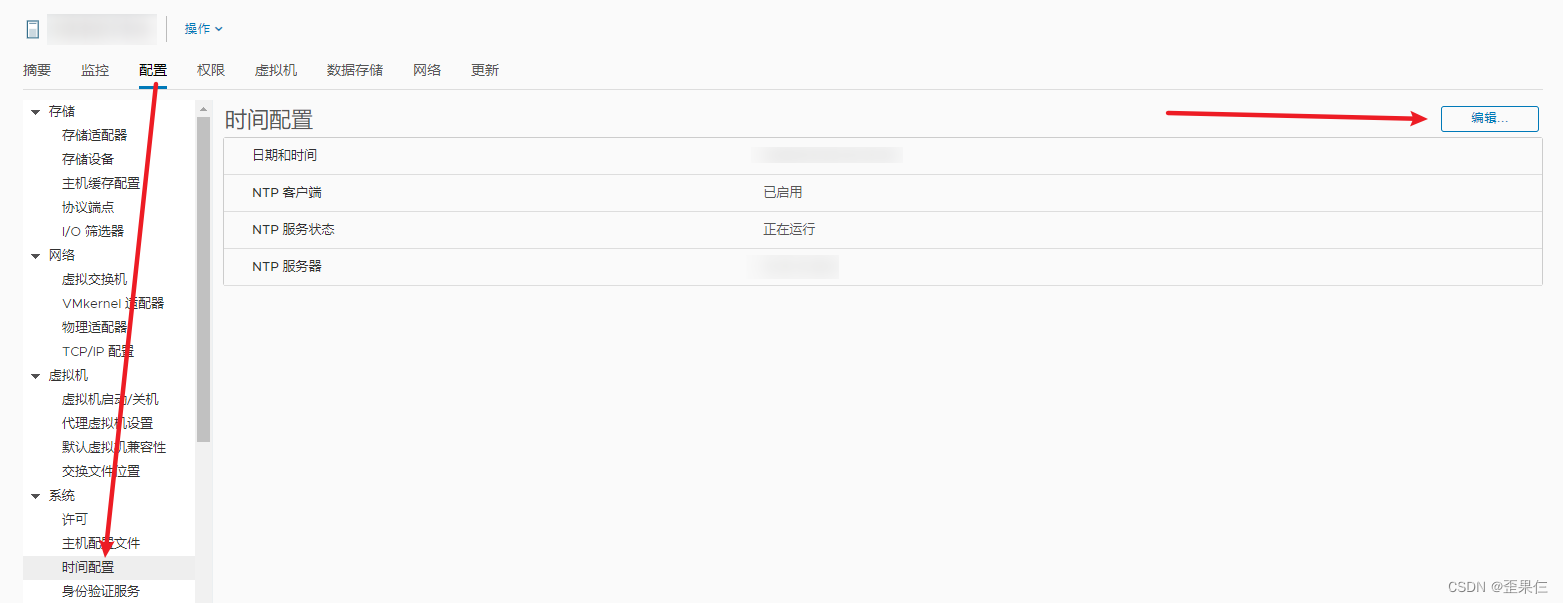
[个人笔记] vCenter设置时区和NTP同步
VMware虚拟化 - 运维篇 第三章 vCenter设置时区和NTP同步 VMware虚拟化 - 运维篇系列文章回顾vCenter设置时区和NTP同步(附加)ESXi设置alias参考链接 系列文章回顾 第一章 vCenter给虚机添加RDM磁盘 第二章 vCenter回收活跃虚拟机的剩余可用空间 vCente…...

(原创)Flutter与Native通信的方式:EventChannel和BasicMessageChannel
前言 上一篇博客主要介绍了MethodChannel的使用方式 Flutter与Native通信的方式:MethodChannel 这篇博客接着讲另外两种通信方式 EventChannel和BasicMessageChannel EventChannel用于从native向flutter发送通知事件,例如flutter通过其监听Android的重…...
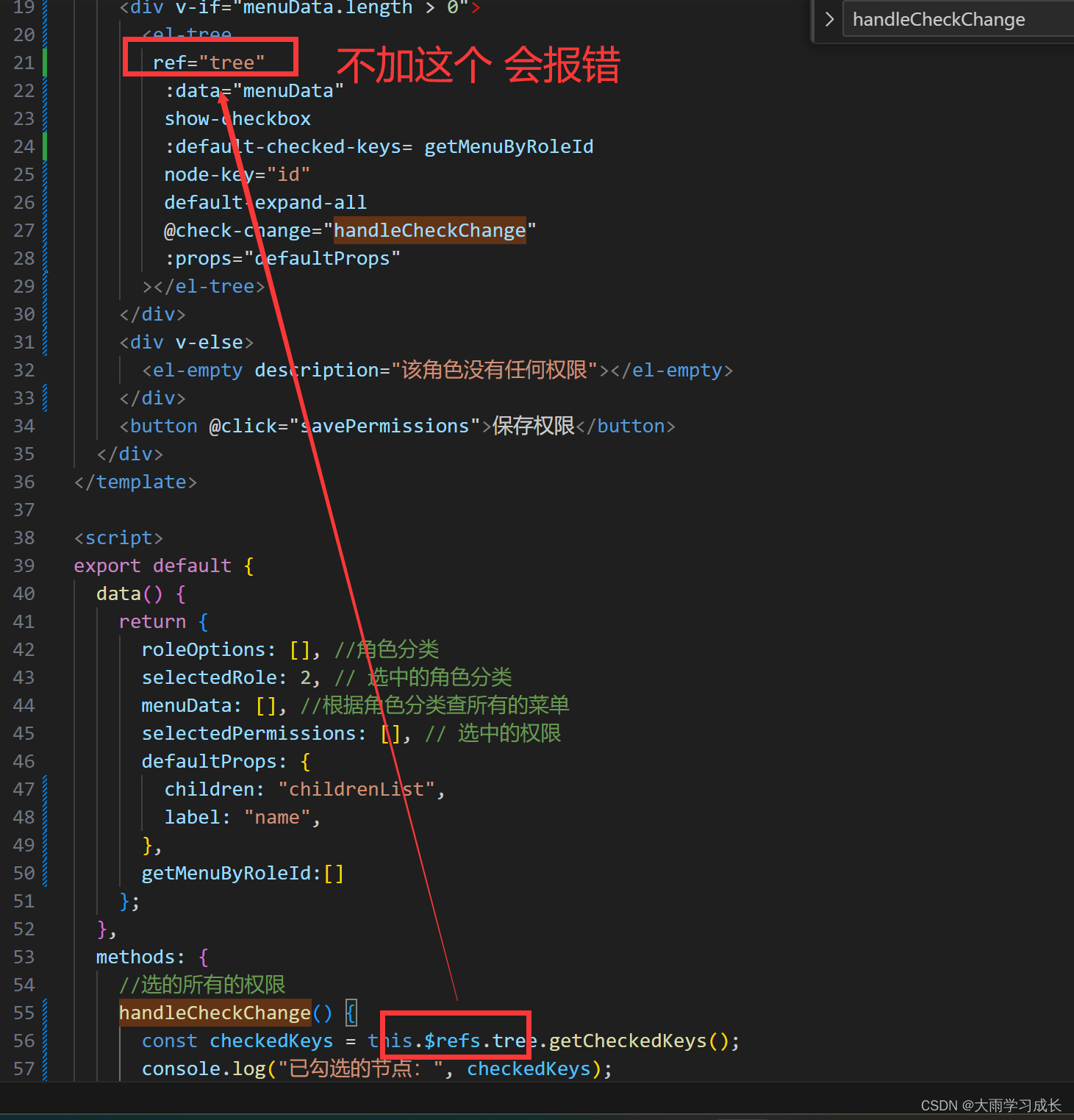
【解决】el-tree报Cannot read property ‘getCheckedKeys‘ of undefined
如果你报错 Cannot read property getCheckedKeys of undefined 或者 Cannot read property getCheckedNodes of undefined 只要在你的在<el-tree>上加个这个,就可以了 ref"tree"...

车载软件架构 —— 信息安全与基础软件
车载软件架构 —— 信息安全与基础软件 我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。 老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师: 没有人关注你。也无需有人关注你。你必须承认自己的价值,你不能站在他人的角度来反对自己。人生在世,最怕…...
)
Midjourney辉光效果失效诊断手册(含12个隐性触发条件与4类GPU显存陷阱)
更多请点击: https://codechina.net 第一章:Midjourney辉光效果失效诊断手册(含12个隐性触发条件与4类GPU显存陷阱) 辉光效果(Glow Effect)在 Midjourney v6 的 --style raw 模式下常被用于强化主体边缘光…...

Charles弱网测试六维参数实战:从丢包率到DNS延迟的精准复现
1. 为什么弱网测试不能只靠“模拟3G”按钮点一下就完事做移动端或Web前端的同学,大概率都听过这句话:“上线前跑一遍Charles,切个2G网络测下加载。”——听起来很专业,实际一查日志,发现90%的团队连Charles的Throttlin…...

PagerLayoutManager:让Android网格分页布局实现变得简单高效的终极方案
PagerLayoutManager:让Android网格分页布局实现变得简单高效的终极方案 【免费下载链接】pager-layoutmanager [暂停维护]Android 网格分页布局。 项目地址: https://gitcode.com/gh_mirrors/pa/pager-layoutmanager PagerLayoutManager是一款专为Android开发…...

为什么选择Espresso?5大优势让快递管理变得前所未有的简单[特殊字符]
为什么选择Espresso?5大优势让快递管理变得前所未有的简单🚀 【免费下载链接】Espresso 🚚 Espresso is an express delivery tracking app designed with Material Design style, built on MVP(Model-View-Presenter) architecture with RxJ…...

tree 命令
tree 命令 tree 命令用于以树状图的形式列出目录下的文件。 1 Linux 安装 tree 命令 # CentOS sudo yum -y install tree # Ubuntu sudo apt -y install tree2 Windows 安装 tree 命令 Windows 10 以上 CMD 和 PowerShell 已经内置了 tree 命令,可以直接使用。 …...

体验低延迟与高稳定性的大模型 API 聚合服务调用感受
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 体验低延迟与高稳定性的大模型 API 聚合服务调用感受 在集成大模型能力到实际应用的过程中,开发者最关心的往往是两个核…...

终极指南:如何在macOS上使用eqMac专业音频均衡器提升音质体验
终极指南:如何在macOS上使用eqMac专业音频均衡器提升音质体验 【免费下载链接】eqMac macOS System-wide Audio Equalizer & Volume Mixer 🎧 项目地址: https://gitcode.com/gh_mirrors/eq/eqMac 你是否厌倦了macOS系统单调的音频效果&#…...

Android 13 HTTPS抓包失效原因与Proxyman实战解决方案
1. 为什么Android 13上抓HTTPS包突然变难了?从Fiddler/Charles失效说起 你是不是也遇到过:上周还能用Fiddler在Android 12真机上稳稳抓到某电商App的登录接口,升级到Android 13后,所有HTTPS请求全变成“Connection refused”或直接…...

5步掌握AMD锐龙SDT调试工具:从硬件小白到调优高手的实战指南
5步掌握AMD锐龙SDT调试工具:从硬件小白到调优高手的实战指南 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址: http…...

OpenSSH regreSSHion漏洞深度解析与零停机修复指南
1. 这个漏洞不是“修一下配置就完事”的普通补丁OpenSSH高危漏洞(CVE-2024-6387)——业内已习惯称它为“regreSSHion”——不是那种改个PermitRootLogin no就能糊弄过去的配置疏漏。我是在凌晨三点被监控告警叫醒的:三台生产跳板机在无任何登…...