QPoint、QLine、QSize、QRect
QPoint、QLine、QSize、QRect
- QPoint
- QLine
- QSize
- QRect
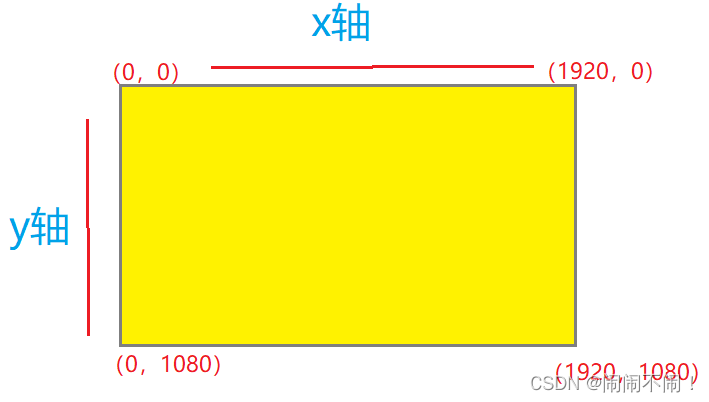
QPoint
// 构造函数
// 构造一个坐标原点, 即(0, 0)
QPoint::QPoint();
// 参数为 x轴坐标, y轴坐标
QPoint::QPoint(int xpos, int ypos);// 设置x轴坐标
void QPoint::setX(int x);
// 设置y轴坐标
void QPoint::setY(int y);// 得到x轴坐标
int QPoint::x() const;
// 得到x轴坐标的引用
int &QPoint::rx();
// 得到y轴坐标
int QPoint::y() const;
// 得到y轴坐标的引用
int &QPoint::ry();// 直接通过坐标对象进行算术运算: 加减乘除
QPoint &QPoint::operator*=(float factor);
QPoint &QPoint::operator*=(double factor);
QPoint &QPoint::operator*=(int factor);
QPoint &QPoint::operator+=(const QPoint &point);
QPoint &QPoint::operator-=(const QPoint &point);
QPoint &QPoint::operator/=(qreal divisor);
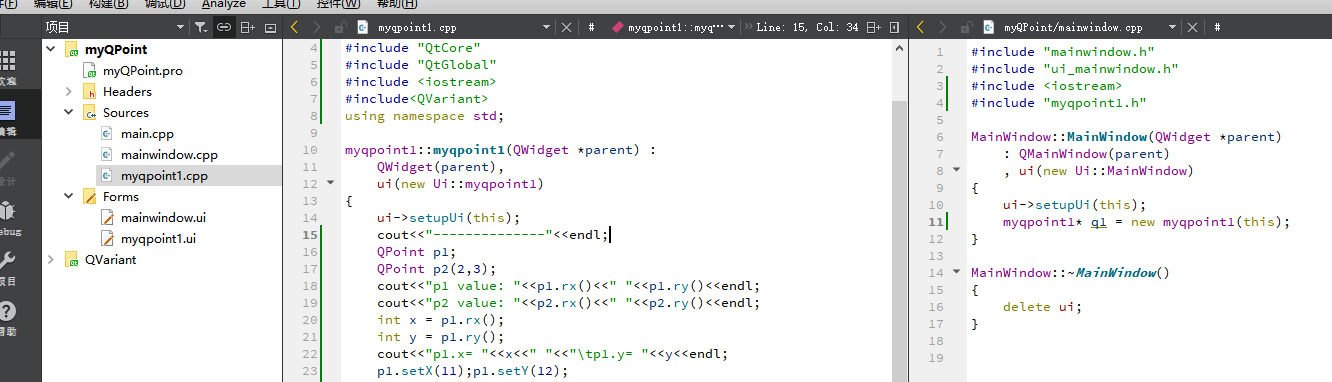
myqpoint1::myqpoint1(QWidget *parent) :QWidget(parent),ui(new Ui::myqpoint1)
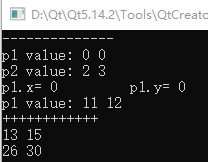
{ui->setupUi(this);cout<<"--------------"<<endl;QPoint p1;QPoint p2(2,3);cout<<"p1 value: "<<p1.rx()<<" "<<p1.ry()<<endl;cout<<"p2 value: "<<p2.rx()<<" "<<p2.ry()<<endl;int x = p1.rx();int y = p1.ry();cout<<"p1.x= "<<x<<" "<<"\tp1.y= "<<y<<endl;p1.setX(11);p1.setY(12);cout<<"p1 value: "<<p1.rx()<<" "<<p1.ry()<<endl;cout<<"++++++++++++"<<endl;p1 = p1+p2;cout<<p1.rx()<<" "<< p1.ry()<<endl;p1 = p1*2;cout<<p1.rx()<<" "<< p1.ry()<<endl;}
QLine
QLine是一个直线类, 封装了两个坐标点 (两点确定一条直线)
// 构造函数
// 构造一个空对象
QLine::QLine();
// 构造一条直线, 通过两个坐标点
QLine::QLine(const QPoint &p1, const QPoint &p2);
// 从点 (x1, y1) 到 (x2, y2)
QLine::QLine(int x1, int y1, int x2, int y2);// 给直线对象设置坐标点
void QLine::setPoints(const QPoint &p1, const QPoint &p2);
// 起始点(x1, y1), 终点(x2, y2)
void QLine::setLine(int x1, int y1, int x2, int y2);
// 设置直线的起点坐标
void QLine::setP1(const QPoint &p1);
// 设置直线的终点坐标
void QLine::setP2(const QPoint &p2);// 返回直线的起始点坐标
QPoint QLine::p1() const;
// 返回直线的终点坐标
QPoint QLine::p2() const;
// 返回值直线的中心点坐标, (p1() + p2()) / 2
QPoint QLine::center() const;// 返回值直线起点的 x 坐标
int QLine::x1() const;
// 返回值直线终点的 x 坐标
int QLine::x2() const;
// 返回值直线起点的 y 坐标
int QLine::y1() const;
// 返回值直线终点的 y 坐标
int QLine::y2() const;// 用给定的坐标点平移这条直线
void QLine::translate(const QPoint &offset);
void QLine::translate(int dx, int dy);
// 用给定的坐标点平移这条直线, 返回平移之后的坐标点
QLine QLine::translated(const QPoint &offset) const;
QLine QLine::translated(int dx, int dy) const;// 直线对象进行比较
bool QLine::operator!=(const QLine &line) const;
bool QLine::operator==(const QLine &line) const;
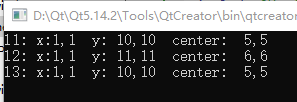
创建直线:
myQLine::myQLine(QWidget *parent) :QWidget(parent),ui(new Ui::myQLine)
{ui->setupUi(this);//cout<<"11"<<endl;QPoint p1(1,1);QPoint p2(10,10);QLine l1(p1,p2);QLine l2(1,1,11,11);QLine l3;l3.setP1(p1);l3.setP2(p2);cout<<"l1: x:"<<l1.p1().x()<<","<<l1.p1().y()<<" y: "<<l1.p2().x()<<","<<l1.p2().y()<<" center: "<<l1.center().x()<<","<<l1.center().y()<<endl;cout<<"l2: x:"<<l2.p1().x()<<","<<l2.p1().y()<<" y: "<<l2.p2().x()<<","<<l2.p2().y()<<" center: "<<l2.center().x()<<","<<l2.center().y()<<endl;cout<<"l3: x:"<<l3.p1().x()<<","<<l3.p1().y()<<" y: "<<l3.p2().x()<<","<<l3.p2().y()<<" center: "<<l3.center().x()<<","<<l3.center().y()<<endl;
}
平移直线:
QLine line(QPoint(100,200),QPoint(150,210));QLine newLine = line.translated(20,20);qDebug()<<"平移前的: "<<line;qDebug()<<"平移后的:"<<newLine;

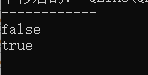
比较:
qDebug()<<(l1==l2);qDebug()<<(l1==l3);
QSize
QSize类用来形容长度和宽度, 常用的API如下:
// 构造函数
// 构造空对象, 对象中的宽和高都是无效的
QSize::QSize();
// 使用宽和高构造一个有效对象
QSize::QSize(int width, int height);// 设置宽度
void QSize::setWidth(int width)
// 设置高度
void QSize::setHeight(int height);// 得到宽度
int QSize::width() const;
// 得到宽度的引用
int &QSize::rwidth();
// 得到高度
int QSize::height() const;
// 得到高度的引用
int &QSize::rheight();// 交换高度和宽度的值
void QSize::transpose();
// 交换高度和宽度的值, 返回交换之后的尺寸信息
QSize QSize::transposed() const;// 进行算法运算: 加减乘除
QSize &QSize::operator*=(qreal factor);
QSize &QSize::operator+=(const QSize &size);
QSize &QSize::operator-=(const QSize &size);
QSize &QSize::operator/=(qreal divisor);例子:
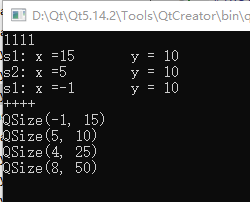
qDebug()<<"1111";QSize s1; s1.setWidth(10); s1.setWidth(15);QSize s2(5,10);cout<<"s1: x ="<<s1.width()<<"\ty = "<<s2.height()<<endl;cout<<"s2: x ="<<s2.width()<<"\ty = "<<s2.height()<<endl;s1.transpose();cout<<"s1: x ="<<s1.width()<<"\ty = "<<s2.height()<<endl;cout<<"++++"<<endl;qDebug()<<s1;qDebug()<<s2;s1 = s1+s2;qDebug()<<s1;s1 = s1*2;qDebug()<<s1;
QRect
使用 QRect类来描述一个矩形, 常用的API如下:
// 构造函数
// 构造一个空对象
QRect::QRect();
// 基于左上角坐标, 和右下角坐标构造一个矩形对象
QRect::QRect(const QPoint &topLeft, const QPoint &bottomRight);
// 基于左上角坐标, 和 宽度, 高度构造一个矩形对象
QRect::QRect(const QPoint &topLeft, const QSize &size);
// 通过 左上角坐标(x, y), 和 矩形尺寸(width, height) 构造一个矩形对象
QRect::QRect(int x, int y, int width, int height);// 设置矩形的尺寸信息, 左上角坐标不变
void QRect::setSize(const QSize &size);
// 设置矩形左上角坐标为(x,y), 大小为(width, height)
void QRect::setRect(int x, int y, int width, int height);
// 设置矩形宽度
void QRect::setWidth(int width);
// 设置矩形高度
void QRect::setHeight(int height);// 返回值矩形左上角坐标
QPoint QRect::topLeft() const;
// 返回矩形右上角坐标
// 该坐标点值为: QPoint(left() + width() -1, top())
QPoint QRect::topRight() const;
// 返回矩形左下角坐标
// 该坐标点值为: QPoint(left(), top() + height() - 1)
QPoint QRect::bottomLeft() const;
// 返回矩形右下角坐标
// 该坐标点值为: QPoint(left() + width() -1, top() + height() - 1)
QPoint QRect::bottomRight() const;
// 返回矩形中心点坐标
QPoint QRect::center() const;// 返回矩形上边缘y轴坐标
int QRect::top() const;
int QRect::y() const;
// 返回值矩形下边缘y轴坐标
int QRect::bottom() const;
// 返回矩形左边缘 x轴坐标
int QRect::x() const;
int QRect::left() const;
// 返回矩形右边缘x轴坐标
int QRect::right() const;
相关文章:
QPoint、QLine、QSize、QRect
QPoint、QLine、QSize、QRect QPointQLineQSizeQRect QPoint // 构造函数 // 构造一个坐标原点, 即(0, 0) QPoint::QPoint(); // 参数为 x轴坐标, y轴坐标 QPoint::QPoint(int xpos, int ypos);// 设置x轴坐标 void QPoint::setX(int x); // 设置y轴坐标 void QPoint::setY(in…...
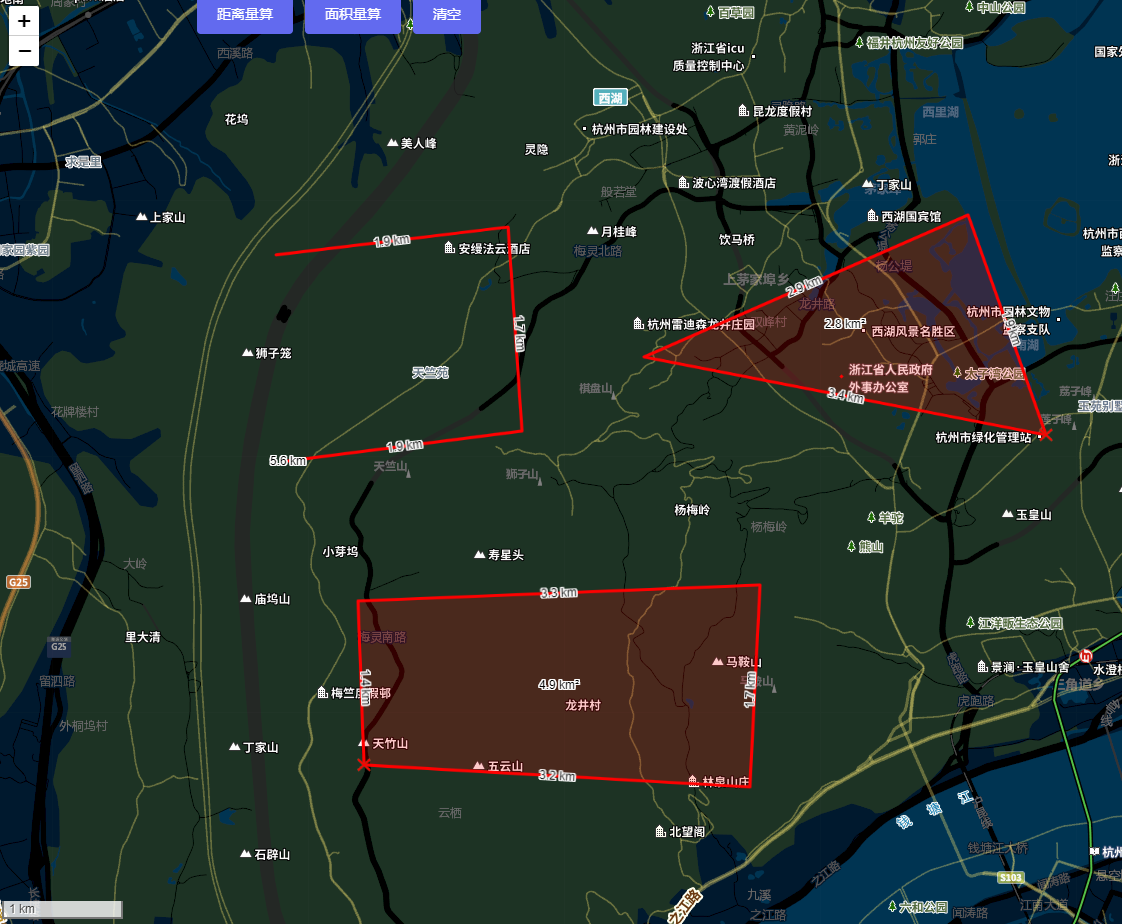
vue+leaflet笔记之地图量测
vueleaflet笔记之地图量测 文章目录 vueleaflet笔记之地图量测开发环境代码简介插件简介与安装使用简介图形量测动态量测 详细源码(Vue3) 本文介绍了Web端使用Leaflet开发库进行距离量测的一种方法 (底图来源:天地图),结合leaflet-measure-path插件能够快速的实现地…...

“深入理解SpringBoot:从入门到精通的几个关键要点“
标题:深入理解Spring Boot:从入门到精通 摘要:本文将深入探讨Spring Boot的关键要点,帮助读者从入门到精通。我们将从Spring Boot的基本概念开始,介绍自动配置、起步依赖、注解驱动开发等特性,并通过示例代…...
数值线性代数: 共轭梯度法
本文总结线性方程组求解的相关算法,特别是共轭梯度法的原理及流程。 零、预修 0.1 LU分解 设,若对于,均有,则存在下三角矩阵和上三角矩阵,使得。 设,若对于,均有,则存在唯一的下三…...
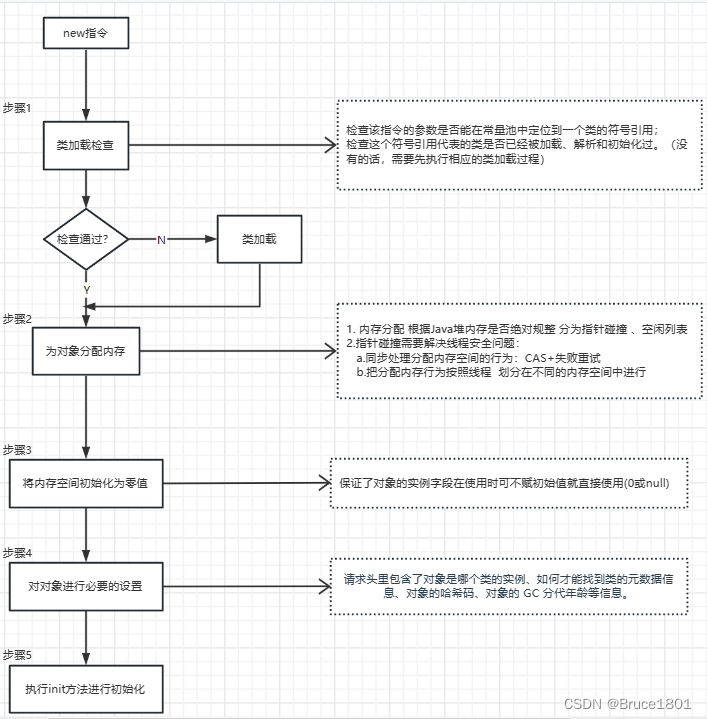
【JVM】详解对象的创建过程
文章目录 1、创建对像的几种方式1、new关键字2、反射3、clone4、反序列化 2、创建过程步骤 1、检查类是否已经被加载步骤 2、 为对象分配内存空间1、指针碰撞针对指针碰撞线程不安全,有两种方案: 2、空闲列表选择哪种分配方式 步骤3、将内存空间初始化为…...

华纳云:ubuntu下如何搭建nfs服务
在Ubuntu下搭建NFS(Network File System)服务,可以实现网络文件共享。以下是在Ubuntu上搭建NFS服务的步骤: 安装NFS服务器和客户端软件: 打开终端,并使用以下命令安装NFS服务器和客户端软件: sudo apt-get update s…...
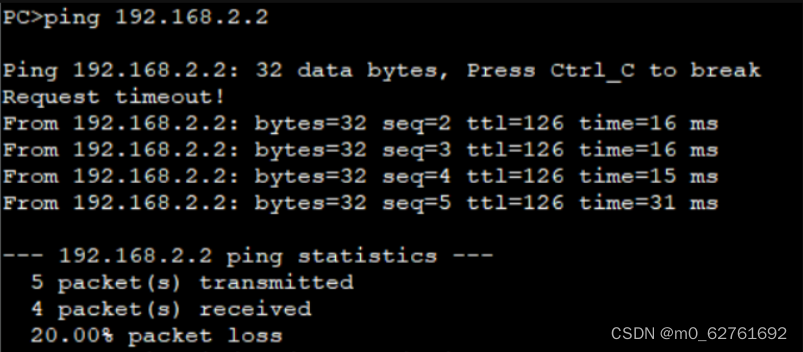
HCIA实验二
实验要求: 1.R2为ISP,只能配置IP 2.R1-R2之间为HDLC封装 3.R2-R3之间为PPP封装,pap认证,R2为主认证方 4.R2-R4之间为PPP封装,chap认证,R2为主认证方 5.R1、R2、R3构建MGRE,仅R1的IP地址固定…...
stm32 舵机 cubemx
文章目录 前言一、cubemx配置二、代码1.serve.c2.serve.h3.主函数 总结 前言 stm32对舵机进行控制,很简单直接一个pwm就可以实现 pwm的周期是50HZ占空比分别对应 一个0.5ms的高电平对应于0度 一个1.5ms的高电平对应于90度 一个2.5ms的高电平对应于180度 因此&#…...

无涯教程-jQuery - Spinner组件函数
Widget Spinner 函数可与JqueryUI中的窗口小部件一起使用。Spinner提供了一种从一组中选择一个值的快速方法。 Spinner - 语法 $( "#menu" ).selectmenu(); Spinner - 示例 以下是显示Spinner用法的简单示例- <!doctype html> <html lang"en"…...
Python 有趣的模块之pynupt——通过pynput控制鼠标和键盘
Python 有趣的模块之pynupt ——通过pynput控制鼠标和键盘 文章目录 Python 有趣的模块之pynupt ——通过pynput控制鼠标和键盘1️⃣简介2️⃣鼠标控制与移动3️⃣键盘控制与输入4️⃣结语📢 1️⃣简介 🚀🚀🚀学会控制鼠标和键盘是…...

docker基于centos7镜像安装python3.7.9
下载centos7镜像 docker pull centos:centos7 启动容器centos-python-3.7 docker run -itd --name centos-python-3.7 -p 60021:22 --privileged centos:centos7 /usr/sbin/init 进入容器 docker exec -it centos-python-3.7 /bin/bash centos7环境下安装python3.7.…...

JavaScript中的switch语句
switch语句和if语句一样,同样是运用于条件循环中; 下面例子我们用switch实现 例如如果今天是周一就学习HTML,周二学习CSS和JavaScript,周三学习vue,周四,周五学习node.js,周六周日快乐玩耍&…...

Jquery笔记
DOM对象通过jquery获取 所有的代码都是基于引入jquery.js文件 var mydiv $(#div);//直接获取到DOM对象元素id var mydiv$(.div);//通过class获取DOM对象,如果有同名class只会获取第一个 var mysapn$(span);//通过元素的标签名获取DOM对象 var divarr$(…...
【C++】优先级队列的基本概念以及其模拟实现
文章目录 补充知识:仿函数一、优先级队列:1.引入2.介绍 二、priority_queue的模拟实现1.大体框架2.私有成员函数:1.向下调整(AdjustDown)2.向上调整(AdjustUp) 3.公有成员函数1大小(…...
TextClamp for Vue3.0(Vue3.0的文本展开收起组件)
呦!大家好,好久没有更新博客了,最近实现了一个一直想自己完成的一个东西,就是文本的展开收起组件,以前项目需要用到,自己实现一个又太繁琐,所以那个时候都是用的别人的轮子,现在自己…...

区间预测 | MATLAB实现VAR向量自回归时间序列区间预测
区间预测 | MATLAB实现VAR向量自回归时间序列区间预测 目录 区间预测 | MATLAB实现VAR向量自回归时间序列区间预测预测效果基本介绍程序设计参考资料预测效果 基本介绍 区间预测 | MATLAB实现VAR向量自回归时间序列区间预测 VAR(Vector Autoregression)模型是一种广泛应用于时…...

在 Windows 上搭建 NTP 服务器
文章目录 一、基础环境二、适用场景三、操作步骤四、常用的NTP服务器五、参考资料 版权声明:本文为博主原创文章,于2023年7月30日首发于CSDN,转载请附上原文出处链接和本声明。本文链接:https://blog.csdn.net/u011046671 一、基础…...
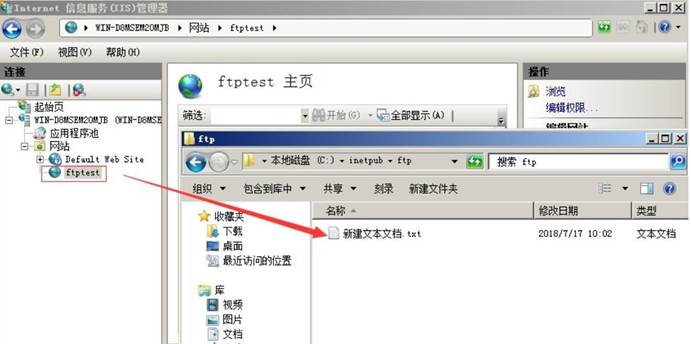
应急响应经典案例-FTP 暴力破解
应急响应经典案例-FTP 暴力破解 应急场景日志分析应急处理措施 应急场景 从昨天开始,网站响应速度变得缓慢,网站服务器登录上去非常卡,重启服务器就能保证一段时间的正常访问,网站响应状态时而飞快时而缓慢,多数时间是…...

41. linux通过yum安装postgresql
文章目录 1.下载安装包2.关闭内置PostgreSQL模块:3.安装postgresql服务:4.初始化postgresql数据库:5.设置开机自启动:6.启动postgresql数据库7.查看postgresql进程8.通过netstat命令或者lsof 监听默认端口54329.使用find命令查找了一下postgresql.conf的配置位置10.修改postgre…...

SpringBoot启动流程及自动配置
SpringBoot启动流程源码: 1、启动SpringBoot启动类SpringbootdemoApplication中的main方法。 SpringBootApplication public class SpringbootdemoApplication {public static void main(String[] args) {SpringApplication.run(SpringbootdemoApplication.class, …...

AI在测试中的应用:从测试用例生成到缺陷预测
随着软件开发流程向敏捷与DevOps的持续演进,软件测试面临着迭代周期缩短、系统复杂度飙升的双重压力。传统的测试方法,高度依赖人工经验与重复劳动,在效率、覆盖率和预测性上逐渐显现瓶颈。人工智能技术的引入,正从辅助工具演变为…...

企业级离线OCR深度解析:5大策略实现高性能文字识别
企业级离线OCR深度解析:5大策略实现高性能文字识别 【免费下载链接】Umi-OCR OCR software, free and offline. 开源、免费的离线OCR软件。支持截屏/批量导入图片,PDF文档识别,排除水印/页眉页脚,扫描/生成二维码。内置多国语言库…...

定制属于自己的AS-I总线
本公司自己已经完成AS-I总线主站、电源、从站模块的纯国产化,可以基于AS-I总线的基础上进行拓展,欢迎有需求的、有想法的各类人士一起撑起AS-I国产化一片天...

【限时开源】Polars 2.0清洗模板库V1.0发布:含金融时序对齐、电商ID映射、日志正则归一化等9大高复用Pipeline
第一章:Polars 2.0大规模数据清洗技巧入门到精通教程 Polars 2.0 是专为高性能、内存安全与并行计算设计的 DataFrame 库,其惰性执行引擎与零拷贝语义使其在处理 GB 级别结构化数据时显著优于 Pandas。本章聚焦真实场景下的数据清洗实践,涵盖…...

Linux安装中文+MySQL的详细过程
中文安装1. 清理环境变量打开终端执行:sed -i /fcitx/d ~/.bashrcsed -i /GTK_IM_MODULE/d ~/.bashrcsed -i /QT_IM_MODULE/d ~/.bashrcsed -i /XMODIFIERS/d ~/.bashrc2. 重新配置 ibus 环境变量echo export GTK_IM_MODULEibus >> ~/.bashrcecho export QT_I…...

配置MyBatis-Plus打印执行的 SQL 语句到控制台或日志文件中
配置MyBatis-Plus打印 1. 使用 log4j 或 logback 配置 MyBatis-Plus 支持多种日志框架,如 SLF4J, Commons Logging, Log4J, Log4J2 和 JDK logging。这里以 Logback 为例说明如何配置。 在你的 logback.xml 文件中添加如下配置: <configuration>&l…...
)
阿里云 ECS 部署 SpringBoot 项目完整教程(无坑可直接照着做)
需要购买阿里云服务器、学习服务器搭建的朋友看这里 👇阿里云超值折扣购买通道 :https://t.aliyun.com/U/L7DIVq 超详细服务器搭建教程:手把手教你阿里云服务器的购买及环境搭建 无论是新手入门、个人建站还是企业部署,都能一站…...
)
C++笔记 继承关系中构造和析构顺序(面向对象)
在C面向对象编程中,继承是实现代码复用和类层次设计的核心特性。当存在基类与派生类的继承关系时,构造函数和析构函数的调用顺序有严格的规则——这不仅是面试高频考点,更是避免内存泄漏、保证对象正确初始化/清理的关键。核心结论先明确&…...

3步突破Navicat试用期限制:让数据库管理工具持续为你服务
3步突破Navicat试用期限制:让数据库管理工具持续为你服务 【免费下载链接】navicat_reset_mac navicat16 mac版无限重置试用期脚本 项目地址: https://gitcode.com/gh_mirrors/na/navicat_reset_mac 作为数据库开发者的日常伴侣,Navicat以其直观的…...

AutoSAR从入门到精通:构建标准化汽车软件架构的完整指南
1. 为什么汽车软件需要AutoSAR? 十年前我刚入行汽车电子时,每个OEM厂商的ECU软件都是独立开发的"黑盒子"。同一款车窗控制功能,在德系、日系、美系车型上要用完全不同的代码实现。更痛苦的是,当需要升级ADAS功能时&…...