基于深度学习的CCPD车牌检测系统(PyTorch+Pyside6+YOLOv5模型)
摘要:基于CCPD数据集的高精度车牌检测系统可用于日常生活中检测与定位车牌目标,利用深度学习算法可实现图片、视频、摄像头等方式的车牌目标检测识别,另外支持结果可视化与图片或视频检测结果的导出。本系统采用YOLOv5目标检测模型训练数据集,使用Pysdie6库来搭建页面展示系统,同时支持ONNX、PT等模型作为权重模型的输出。本系统支持的功能包括训练模型的导入、初始化;置信分与IOU阈值的调节、图像上传、检测、可视化结果展示、结果导出与结束检测;视频的上传、检测、可视化结果展示、结果导出与结束检测;摄像头的上传、检测、可视化结果展示与结束检测;已检测目标列表、位置信息;前向推理用时。另外本车牌子检测识别系统同时支持原始图像与检测结果图像的同时展示,原始视频与检测结果视频的同时展示。本博文提供了完整的Python代码和使用教程,适合新入门的朋友参考,完整代码资源文件请转至文末的下载链接。

基本介绍
近年来,机器学习和深度学习取得了较大的发展,深度学习方法在检测精度和速度方面与传统方法相比表现出更良好的性能。YOLOv5是单阶段目标检测算法YOLO的第五代,根据实验得出结论,其在速度与准确性能方面都有了明显提升,开源的代码可见https://github.com/ultralytics/yolov5。因此本博文利用YOLOv5检测算法实现一种高精度车牌检测模型,再搭配上Pyside6库写出界面系统,完成目标检测识别页面的开发。注意到YOLO系列算法的最新进展已有YOLOv6、YOLOv7、YOLOv8等算法,将本系统中检测算法替换为最新算法的代码也将在后面发布,欢迎关注收藏。
环境搭建
(1)下载完整文件到自己电脑上,然后使用cmd打开到文件目录
(2)利用Conda创建环境(Anacodna),conda create -n yolo5 python=3.8 然后安装torch和torchvision(pip install torch1.10.0+cu113 torchvision0.11.0+cu113 -f https://download.pytorch.org/whl/torch_stable.html -i https://pypi.tuna.tsinghua.edu.cn/simple)其中-i https://pypi.tuna.tsinghua.edu.cn/simple代表使用清华源,这行命令要求nvidia-smi显示的CUDA版本>=11.3,最后安装剩余依赖包使用:pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple


(3)安装Pyside6库 pip install pyside6==6.3 -i https://pypi.tuna.tsinghua.edu.cn/simple

(4)对于windows系统下的pycocotools库的安装:pip install pycocotools-windows -i https://pypi.tuna.tsinghua.edu.cn/simple
界面及功能展示
下面给出本博文设计的软件界面,整体界面简洁大方,大体功能包括训练模型的导入、初始化;置信分与IOU阈值的调节、图像上传、检测、可视化结果展示、结果导出与结束检测;视频的上传、检测、可视化结果展示、结果导出与结束检测;已检测目标列表、位置信息;前向推理用时。希望大家可以喜欢,初始界面如下图:

模型选择与初始化
用户可以点击模型权重选择按钮上传训练好的模型权重,训练权重格式可为.pt、.onnx以及。engine等,之后再点击模型权重初始化按钮可实现已选择模型初始化信息的设置。


置信分与IOU的改变
在Confidence或IOU下方的输入框中改变值即可同步改变滑动条的进度,同时改变滑动条的进度值也可同步改变输入框的值;Confidence或IOU值的改变将同步到模型里的配置,将改变检测置信度阈值与IOU阈值。
图像选择、检测与导出
用户可以点击选择图像按钮上传单张图片进行检测与识别。

再点击图像检测按钮可完成输入图像的目标检测功能,之后系统会在用时一栏输出检测用时,在目标数量一栏输出已检测到的目标数量,在下拉框可选择已检测目标,对应于目标位置(即xmin、ymin、xmax以及ymax)标签值的改变。

再点击检测结果展示按钮可在系统左下方显示输入图像检测的结果,系统将显示识别出图片中的目标的类别、位置和置信度信息。

点击图像检测结果导出按钮即可导出检测后的图像,在保存栏里输入保存的图片名称及后缀即可实现检测结果图像的保存。

点击结束图像检测按钮即可完成系统界面的刷新,将所有输出信息清空,之后再点击选择图像或选择视频按钮来上传图像或视频。
视频选择、检测与导出
用户可以点击选择视频按钮上传视频进行检测与识别,之后系统会将视频的第一帧输入到系统界面的左上方显示。

再点击视频检测按钮可完成输入视频的目标检测功能,之后系统会在用时一栏输出检测用时,在目标数量一栏输出已检测到的目标数量,在下拉框可选择已检测目标,对应于目标位置(即xmin、ymin、xmax以及ymax)标签值的改变。

点击暂停视频检测按钮即可实现输入视频的暂停,此时按钮变为继续视频检测,输入视频帧与帧检测结果会保留在系统界面,可点击下拉目标框选择已检测目标的坐标位置信息,再点击继续视频检测按钮即可实现输入视频的检测。
点击视频检测结果导出按钮即可导出检测后的视频,在保存栏里输入保存的图片名称及后缀即可实现检测结果视频的保存。

点击结束视频检测按钮即可完成系统界面的刷新,将所有输出信息清空,之后再点击选择图像或选择视频按钮来上传图像或视频。
摄像头打开、检测与结束
用户可以点击打开摄像头按钮来打开摄像头设备进行检测与识别,之后系统会将摄像头图像输入到系统界面的左上方显示。

再点击摄像头检测按钮可完成输入摄像头的目标检测功能,之后系统会在用时一栏输出检测用时,在目标数量一栏输出已检测到的目标数量,在下拉框可选择已检测目标,对应于目标位置(即xmin、ymin、xmax以及ymax)标签值的改变。

点击结束视频检测按钮即可完成系统界面的刷新,将所有输出信息清空,之后再点击选择图像或选择视频或打开摄像按钮来上传图像、视频或打开摄像头。
算法原理介绍
本系统采用了基于深度学习的单阶段目标检测算法YOLOv5,相比于YOLOv3和YOLOv4,YOLOv5在检测精度和速度上都有很大的提升。YOLOv5算法的核心思想是将目标检测问题转化为一个回归问题,通过直接预测物体中心点的坐标来代替Anchor框。此外,YOLOv5使用SPP(Spatial Pyramid Pooling)的特征提取方法,这种方法可以在不增加计算量的情况下,有效地提取多尺度特征,提高检测性能。YOLOv5s模型的整体结构如下图所示。

YOLOv5网络结构是由Input、Backbone、Neck、Prediction组成。YOLOv5的Input部分是网络的输入端,采用Mosaic数据增强方式,对输入数据随机裁剪,然后进行拼接。Backbone是YOLOv5提取特征的网络部分,特征提取能力直接影响整个网络性能。在特征提取阶段,YOLOv5使用CSPNet(Cross Stage Partial Network)结构,它将输入特征图分为两部分,一部分通过一系列卷积层进行处理,另一部分直接进行下采样,最后将这两部分特征图进行融合。这种设计使得网络具有更强的非线性表达能力,可以更好地处理目标检测任务中的复杂背景和多样化物体。在Neck阶段使用连续的卷积核C3结构块融合特征图。在Prediction阶段,模型使用结果特征图预测目标的中心坐标与尺寸信息。博主觉得YOLOv5不失为一种目标检测的高性能解决方案,能够以较高的准确率对目标进行分类与定位。当然现在YOLOv6、YOLOv7、YOLOv8等算法也在不断提出和改进,后续博主也会将这些算法融入到本系统中,敬请期待。
数据集介绍
本系统使用的CCPD车牌数据集标注了车牌这一个类别,数据集总计313518张图片。该数据集中类别都有大量的旋转和不同的光照条件,有助于训练出更加鲁棒的检测模型。本文实验的车牌检测数据集包含训练集248610张图片,验证集58446张图片,选取部分数据部分样本数据集如下图所示。由于YOLOv5算法对输入图片大小有限制,需要将所有图片调整为相同的大小。为了在不影响检测精度的情况下尽可能减小图片的失真,我们将所有图片调整为640x640的大小,并保持原有的宽高比例。此外,为了增强模型的泛化能力和鲁棒性,我们还使用了数据增强技术,包括随机旋转、缩放、裁剪和颜色变换等,以扩充数据集并减少过拟合风险。

关键代码解析
本系统的深度学习模型使用PyTorch实现,基于YOLOv5算法进行目标检测。在训练阶段,我们使用了预训练模型作为初始模型进行训练,然后通过多次迭代优化网络参数,以达到更好的检测性能。在训练过程中,我们采用了学习率衰减和数据增强等技术,以增强模型的泛化能力和鲁棒性。
在测试阶段,我们使用了训练好的模型来对新的图片和视频进行检测。通过设置阈值,将置信度低于阈值的检测框过滤掉,最终得到检测结果。同时,我们还可以将检测结果保存为图片或视频格式,以便进行后续分析和应用。本系统基于YOLOv5算法,使用PyTorch实现。代码中用到的主要库包括PyTorch、NumPy、OpenCV、PyQt等。


Pyside6界面设计
Pyside6是Python语言的GUI编程解决方案之一,可以快速地为Python程序创建GUI应用。在本博文中,我们使用Pyside6库创建一个图形化界面,为用户提供简单易用的交互界面,实现用户选择图片、视频进行目标检测。
我们使用Qt Designer设计图形界面,然后使用Pyside6将设计好的UI文件转换为Python代码。图形界面中包含多个UI控件,例如:标签、按钮、文本框、多选框等。通过Pyside6中的信号槽机制,可以使得UI控件与程序逻辑代码相互连接。
实验结果与分析
在实验结果与分析部分,我们使用精度和召回率等指标来评估模型的性能,还通过损失曲线和PR曲线来分析训练过程。在训练阶段,我们使用了前面介绍的CCPD车牌数据集进行训练,使用了YOLOv5算法对数据集训练,总计训练了300个epochs。在训练过程中,我们使用tensorboard记录了模型在训练集和验证集上的损失曲线。从下图可以看出,随着训练次数的增加,模型的训练损失和验证损失都逐渐降低,说明模型不断地学习到更加精准的特征。在训练结束后,我们使用模型在数据集的验证集上进行了评估,得到了以下结果。

下图展示了我们训练的YOLOv5模型在验证集上的PR曲线,从图中可以看出,模型取得了较高的召回率和精确率,整体表现良好。

下图展示了本博文在使用YOLOv5模型对车牌数据集进行训练时候的Mosaic数据增强图像。


综上,本博文训练得到的YOLOv5模型在数据集上表现良好,具有较高的检测精度和鲁棒性,可以在实际场景中应用。另外本博主对整个系统进行了详细测试,最终开发出一版流畅的高精度目标检测系统界面,就是本博文演示部分的展示,完整的UI界面、测试图片视频、代码文件等均已打包上传,感兴趣的朋友可以关注我私信获取。
其他基于深度学习的目标检测系统如西红柿、猫狗、山羊、野生目标、烟头、二维码、头盔、交警、野生动物、野外烟雾、人体摔倒识别、红外行人、家禽猪、苹果、推土机、蜜蜂、打电话、鸽子、足球、奶牛、人脸口罩、安全背心、烟雾检测系统等有需要的朋友关注我,从博主其他视频中获取下载链接。
完整项目目录如下所示:
相关文章:
基于深度学习的CCPD车牌检测系统(PyTorch+Pyside6+YOLOv5模型)
摘要:基于CCPD数据集的高精度车牌检测系统可用于日常生活中检测与定位车牌目标,利用深度学习算法可实现图片、视频、摄像头等方式的车牌目标检测识别,另外支持结果可视化与图片或视频检测结果的导出。本系统采用YOLOv5目标检测模型训练数据集…...

input元素中的form属性有什么用?
在HTML中,input元素的form属性用于指定该输入字段所属的表单(form元素)。通过将input元素的form属性设置为相应的表单的id值,可以将输入字段与表单进行关联。 这个属性对于两个主要目的非常有用: 表单关联࿱…...

【数据结构篇C++实现】- 特殊的线性表 - 串
友情链接:C/C系列系统学习目录 文章目录 串🚀一、串的定义🚀二、串的存储结构🛴(一)串的顺序存储结构1、定长顺序存储表示2、堆分配存储表示 🛴(二)串的链式存储结构3、块…...

DevOps系列文章 之 Springboot单元测试
在没有代码生成工具或尝试一门新的 ORM框架时,当我们希望不去另外写 Service 和 Controller 来验证 DAO 层的代码不希望只通过接口请求的方式来验证时,这时候单元测试的方式就可以帮助我们满足这一需求。 在我们开发Web应用时,经常会直接去观…...
04 linux之C 语言高级编程
gcc和gdb GNU工具 编译工具:把一个源程序编译为一个可执行程序调试工具:能对执行程序进行源码或汇编级调试软件工程工具:用于协助多人开发或大型软件项目的管理,如make、CVS、Subvision其他工具:用于把多个目标文件链…...
深入学习 Redis - Stream、Geospatial、HyperLogLog、Bitmap、Bitfields 类型扩展
目录 前言 Stream geospatial HyperLogLog Bitmaps Bitfields 前言 redis 中最关键的五个数据类型 String、List、Hash、Set、Zset 应用最广泛,同时 redis 也推出了额外的 5 个数据类型,他们分别是针对特殊场景才进行的应用的. Ps:这几种…...

Windows11+Opencv+Clion编译源码
Windows11OpencvClion编译源码 参考:https://www.robotsfan.com/posts/69395e08.html 注意事项 编译过程中使用的软件,开源码等所有工具的安装路径一定不要有中文和空格。cmake过程会下载一些文件,如果是局域网的话可能下载不下来…...
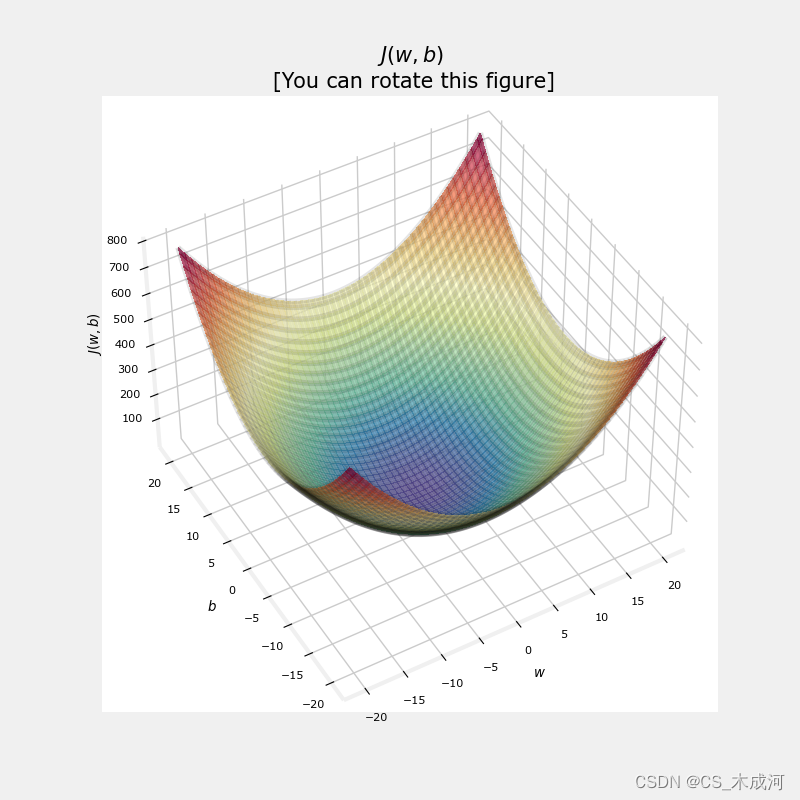
【机器学习】Cost Function
Cost Function 1、计算 cost2、cost 函数的直观理解3、cost 可视化总结附录 首先,导入所需的库: import numpy as np %matplotlib widget import matplotlib.pyplot as plt from lab_utils_uni import plt_intuition, plt_stationary, plt_update_onclic…...
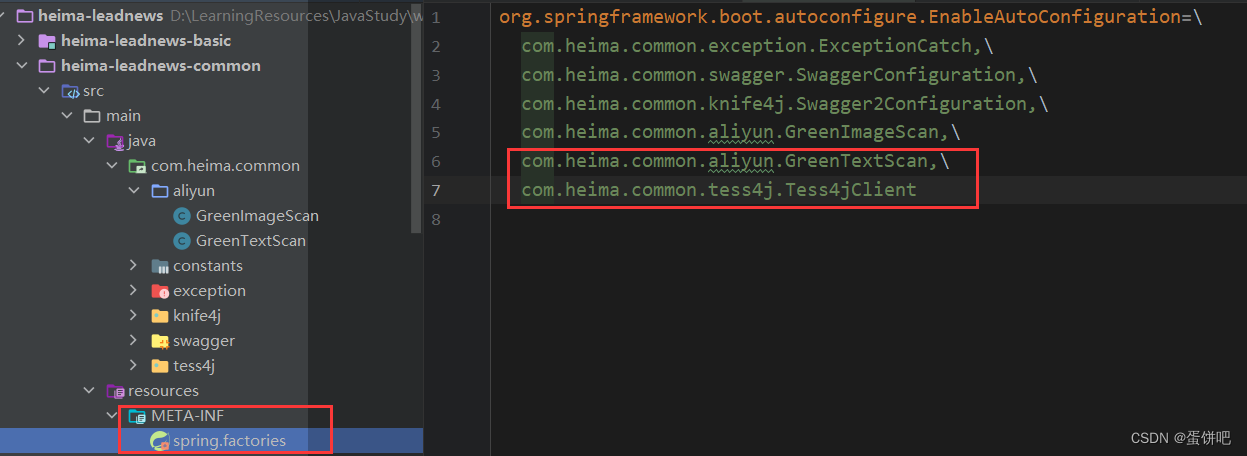
【黑马头条之内容安全第三方接口】
本笔记内容为黑马头条项目的文本-图片内容审核接口部分 目录 一、概述 二、准备工作 三、文本内容审核接口 四、图片审核接口 五、项目集成 一、概述 内容安全是识别服务,支持对图片、视频、文本、语音等对象进行多样化场景检测,有效降低内容违规风…...

回归预测 | MATLAB实现GRNN广义回归神经网络多输入单输出回归预测(多指标,多图)
回归预测 | MATLAB实现GRNN广义回归神经网络多输入单输出回归预测(多指标,多图) 目录 回归预测 | MATLAB实现GRNN广义回归神经网络多输入单输出回归预测(多指标,多图)效果一览基本介绍程序设计参考资料效果一览 基本介绍 MATLAB实现GRNN广义回归神经网络多输入单输出回归…...
详解)
STM32 HAL库函数——HAL_UART_RxCpltCallback()详解
HAL_UART_RxCpltCallback函数 他是谁,他和谁有关功能用法每收到一个字符,就自动调用一次??示例----接收未知长度的字符 他是谁,他和谁有关 HAL_UART_RxCpltCallback 是一个回调函数,用于在使用 HAL 库进行…...
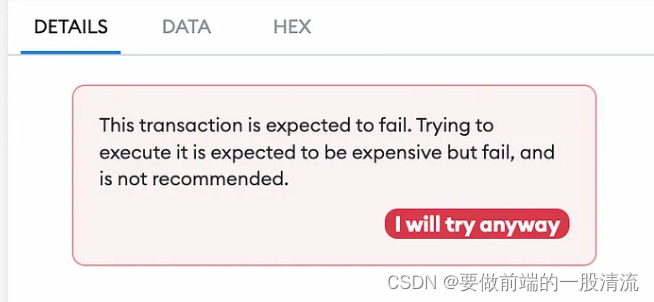
前端调用合约如何避免出现transaction fail
前言: 作为开发,你一定经历过调用合约的时候发现 gas fee 超出限制,但是不知道报了什么错。这个时候一般都是触发了require错误合约校验。对于用户来说他不理解为什么一笔交易会花费如此大的gas,那我们作为开发如何尽量避免这种情…...

选择器的使用
目录 层级选择器属性选择器伪类选择器结构伪类选择器目标伪类选择器 层级选择器 /*子代选择器:选出box下的所有li标签*/.box>li{background-color: aliceblue;}/* 选出box后面的第一个兄弟li标签 */.boxli{background-color: aliceblue;}/* 选出box后面的所有兄…...

软考A计划-系统集成项目管理工程师-项目干系人管理-上
点击跳转专栏>Unity3D特效百例点击跳转专栏>案例项目实战源码点击跳转专栏>游戏脚本-辅助自动化点击跳转专栏>Android控件全解手册点击跳转专栏>Scratch编程案例点击跳转>软考全系列点击跳转>蓝桥系列 👉关于作者 专注于Android/Unity和各种游…...
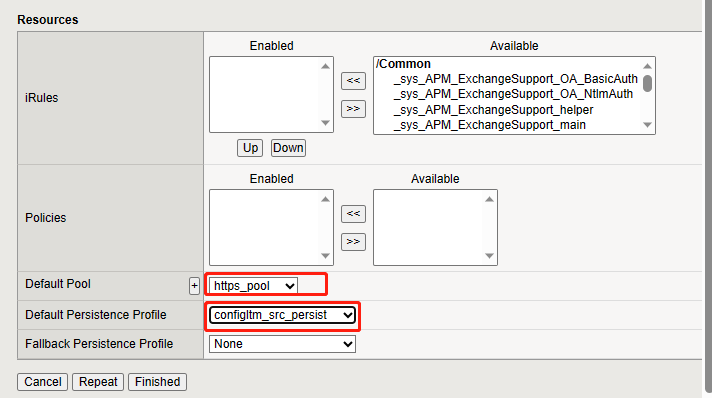
F5 LTM 知识点和实验 2-负载均衡基础概念
第二章:负载均衡基础概念 目标: 使用网页和TMSH配置virtual servers,pools,monitors,profiles和persistence等。查看统计信息 基础概念: Node一个IP地址。是创建pool池的基础。可以手工创建也可以自动创…...
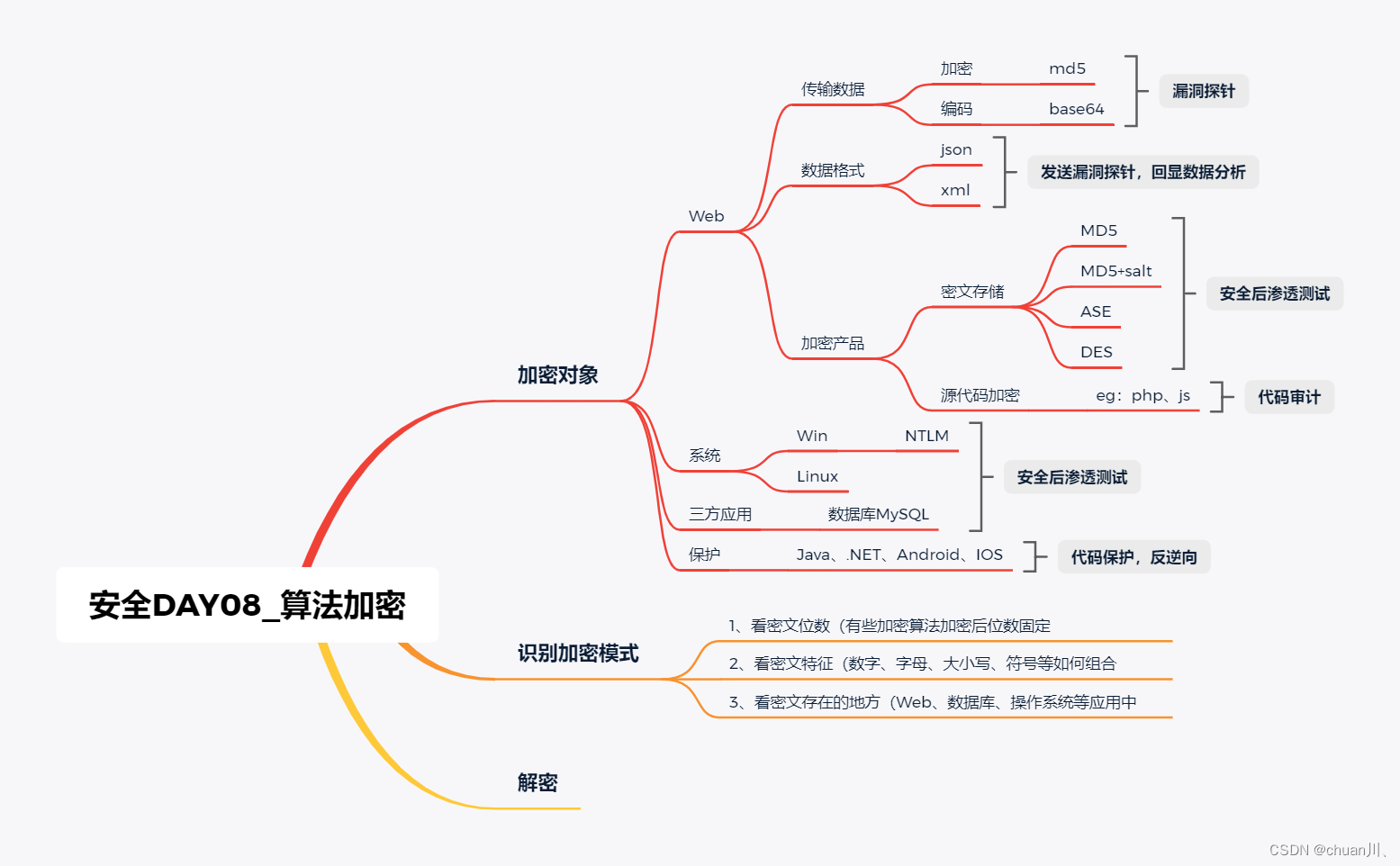
安全学习DAY08_算法加密
算法加密 漏洞分析、漏洞勘测、漏洞探针、挖漏洞时要用到的技术知识 存储密码加密-应用对象传输加密编码-发送回显数据传输格式-统一格式代码特性混淆-开发语言 传输数据 – 加密型&编码型 安全测试时,通常会进行数据的修改增加提交测试 数据在传输的时候进行…...

OpenCloudOS 与PolarDB全面适配
近日,OpenCloudOS 开源社区签署阿里巴巴开源 CLA (Contribution License Agreement, 贡献许可协议), 正式与阿里云 PolarDB 开源数据库社区牵手,并展开 OpenCloudOS (V8)与阿里云开源云原生数据库 PolarDB 分布式版、开源云原生数…...

如何在Linux系统中使用yum命令安装MySQL
1、安装软件 # yum install -y https://repo.mysql.com//mysql80-community-release-el7-8.noarch.rpm # yum -y install mysql-community-server网址来源:https://dev.mysql.com/downloads/repo/yum/ 2、启动软件 # systemctl enable mysqld# systemctl start my…...
在Ail Linux中手动配置IPv6
第一步,登录阿里云服务器控制台,在“概览”页面找到对应实例,然后单击实例ID。 第二步,在“实例详情”页面中的“网络信息”栏目中,可以发现“IPv6 地址”中没有数据,然后单击“专有网络”的专有网络ID。 第…...
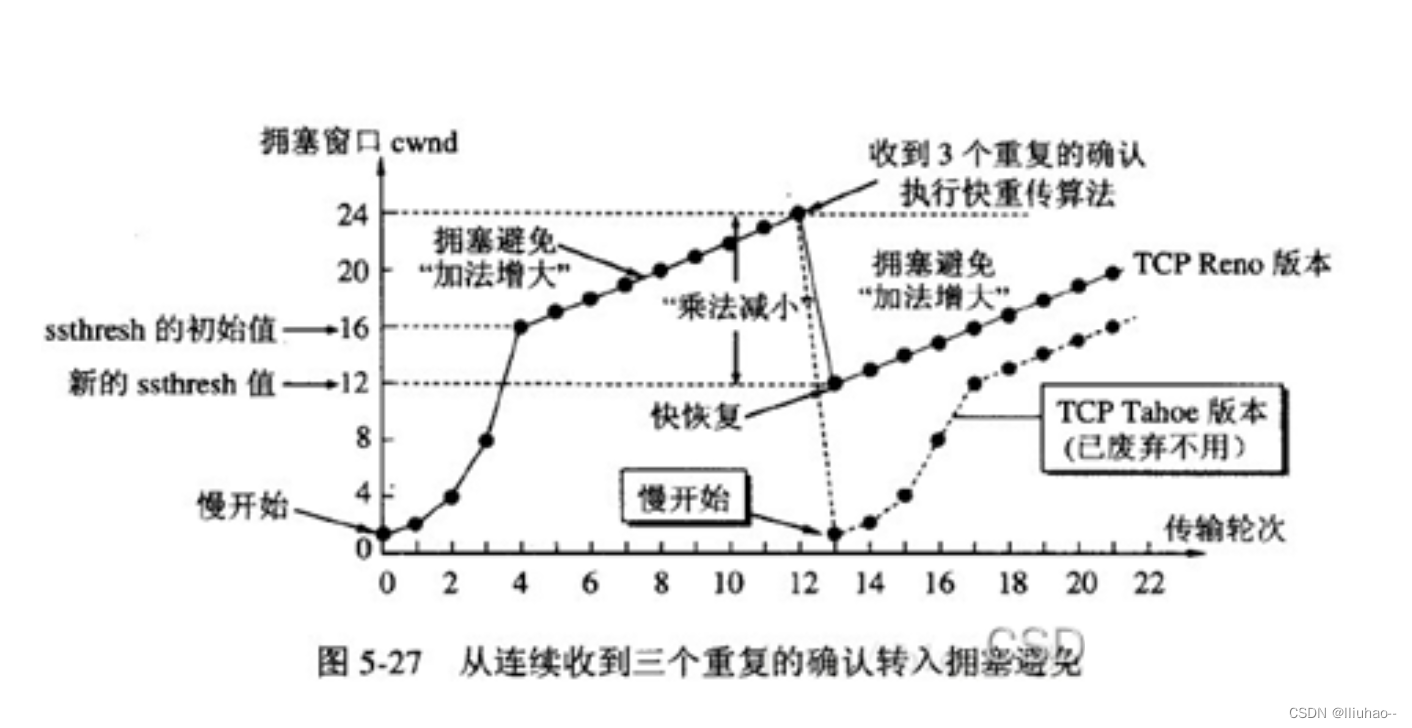
TCP如何保证服务的可靠性
TCP如何保证服务的可靠性 确认应答超时重传流量控制滑动窗口机制概述发送窗口和接收窗口的工作原理几种滑动窗口协议1比特滑动窗口协议(停等协议)后退n协议选择重传协议 采用滑动窗口的问题(死锁可能,糊涂窗口综合征)死…...

WarcraftHelper:魔兽争霸III终极增强插件 - 简单三步让经典游戏焕发新生
WarcraftHelper:魔兽争霸III终极增强插件 - 简单三步让经典游戏焕发新生 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 还在为经典魔兽争…...

专业级抖音资源自动化采集方案:douyin-downloader企业级部署指南
专业级抖音资源自动化采集方案:douyin-downloader企业级部署指南 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fall…...

Input Overlay:免费开源直播输入显示插件终极指南
Input Overlay:免费开源直播输入显示插件终极指南 【免费下载链接】input-overlay Show keyboard, gamepad and mouse input on stream 项目地址: https://gitcode.com/gh_mirrors/in/input-overlay 在游戏直播、教学演示或技术分享中,观众最常问…...

Parsec虚拟显示驱动实战教程:5步创建完美游戏串流显示环境
Parsec虚拟显示驱动实战教程:5步创建完美游戏串流显示环境 【免费下载链接】parsec-vdd ✨ Perfect virtual display for game streaming 项目地址: https://gitcode.com/gh_mirrors/pa/parsec-vdd Parsec虚拟显示驱动(Parsec VDD)是一…...

Spring Boot Actuator生产级监控与管理工具包
Spring Boot Actuator 是 Spring Boot 提供的生产级监控与管理工具包,帮你把应用“可观测化”。它提供了一系列内置的端点(Endpoint),用来查看应用的内部状态,比如健康情况、配置信息、内存指标等。你可以把它理解成为…...

如何快速掌握猫抓工具:终极视频嗅探与下载指南
如何快速掌握猫抓工具:终极视频嗅探与下载指南 【免费下载链接】cat-catch 猫抓 浏览器资源嗅探扩展 / cat-catch Browser Resource Sniffing Extension 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 还在为网页上的精彩视频无法保存而烦恼吗…...

RK3568开发板NFS服务器搭建:嵌入式Linux开发效率提升实战
1. 项目概述与核心价值最近在折腾一块瑞芯微的RK3568开发板,想在上面跑一些自己的应用。开发调试阶段,最头疼的就是每次修改完代码,都得重新编译、打包、烧录到板子上,这个过程不仅耗时,还容易打断思路。为了解决这个痛…...

STM32 SysTick中断:嵌入式系统时间管理的核心原理与实战应用
1. 项目概述:为什么SysTick中断是STM32开发的基石在STM32的嵌入式开发世界里,无论你是刚入门的新手,还是已经做过几个项目的熟手,有一个功能你几乎无法绕开,那就是SysTick——系统滴答定时器。你可能在HAL库的初始化代…...

Go语言整洁架构:分层设计
Go语言整洁架构:分层设计 1. 分层结构 internal/domain/ # 领域实体usecase/ # 用例adapter/ # 适配器handler/ # HTTP处理2. 总结 整洁架构强调业务逻辑的独立性和依赖方向的正确性。...

RUST编程学习.2语法
目录 前言 一、思维导图 二、Rust语法专属 1.迭代器 2.生命周期 总结 前言 在进行编译器下载后,就可以写代码进行编译调试了,在这之前就是要学习rust语法,在学习的过程中我整理了一版思维导图,最直观的感觉就是rust的语法很…...