基于opencv的几种图像滤波
一、介绍
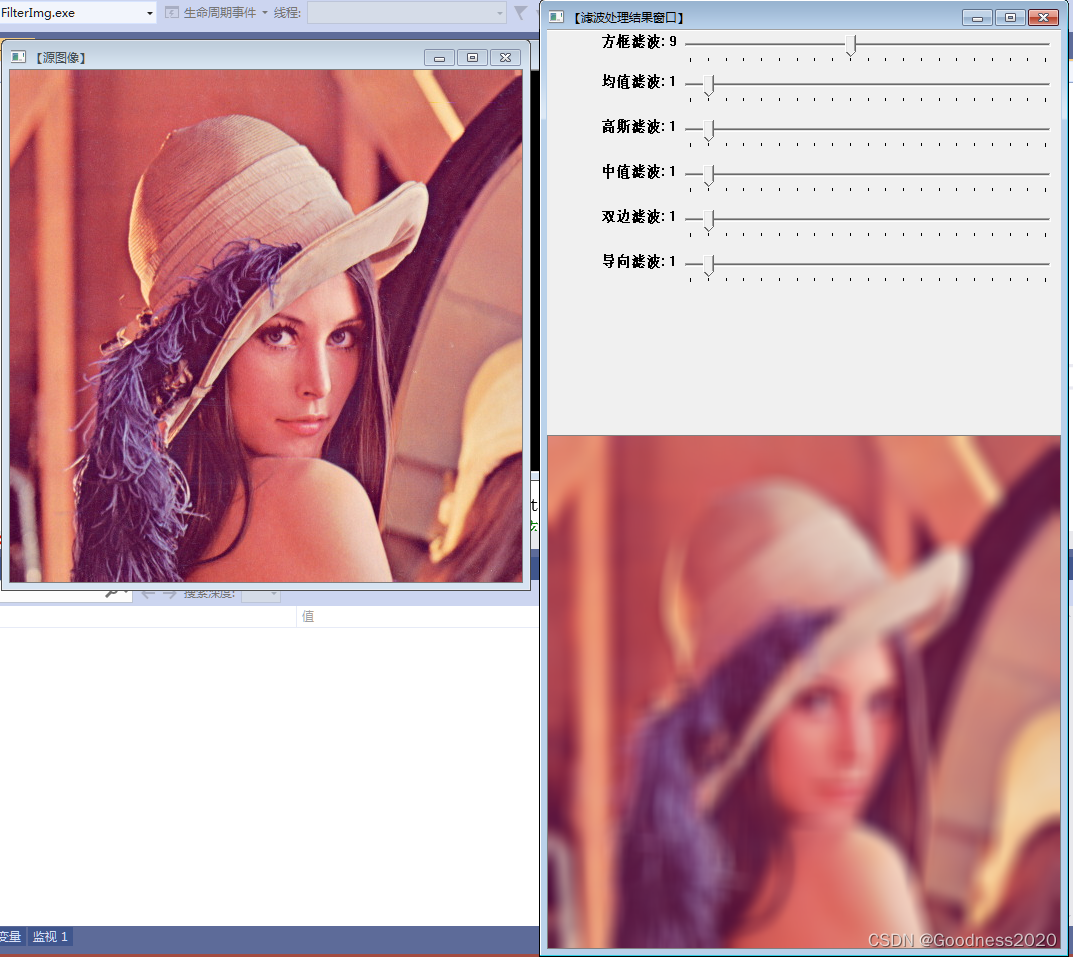
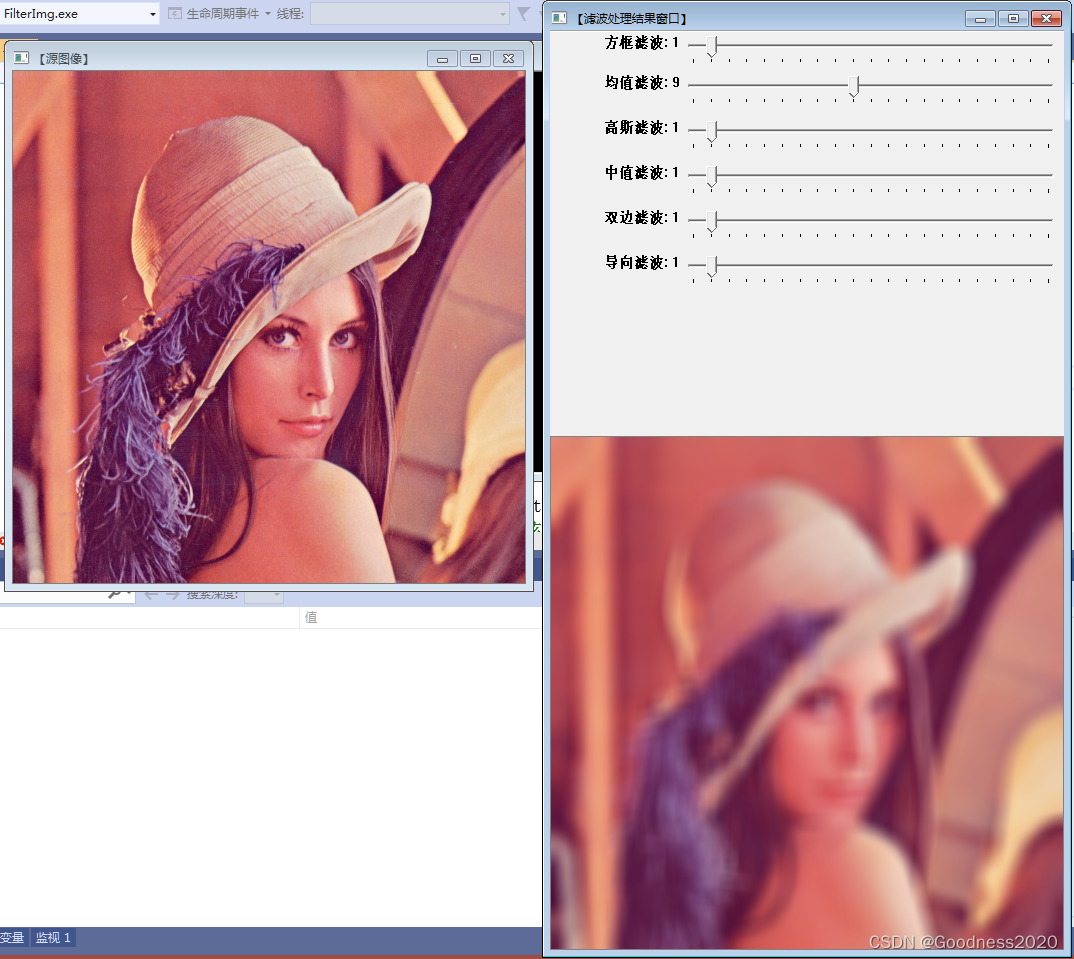
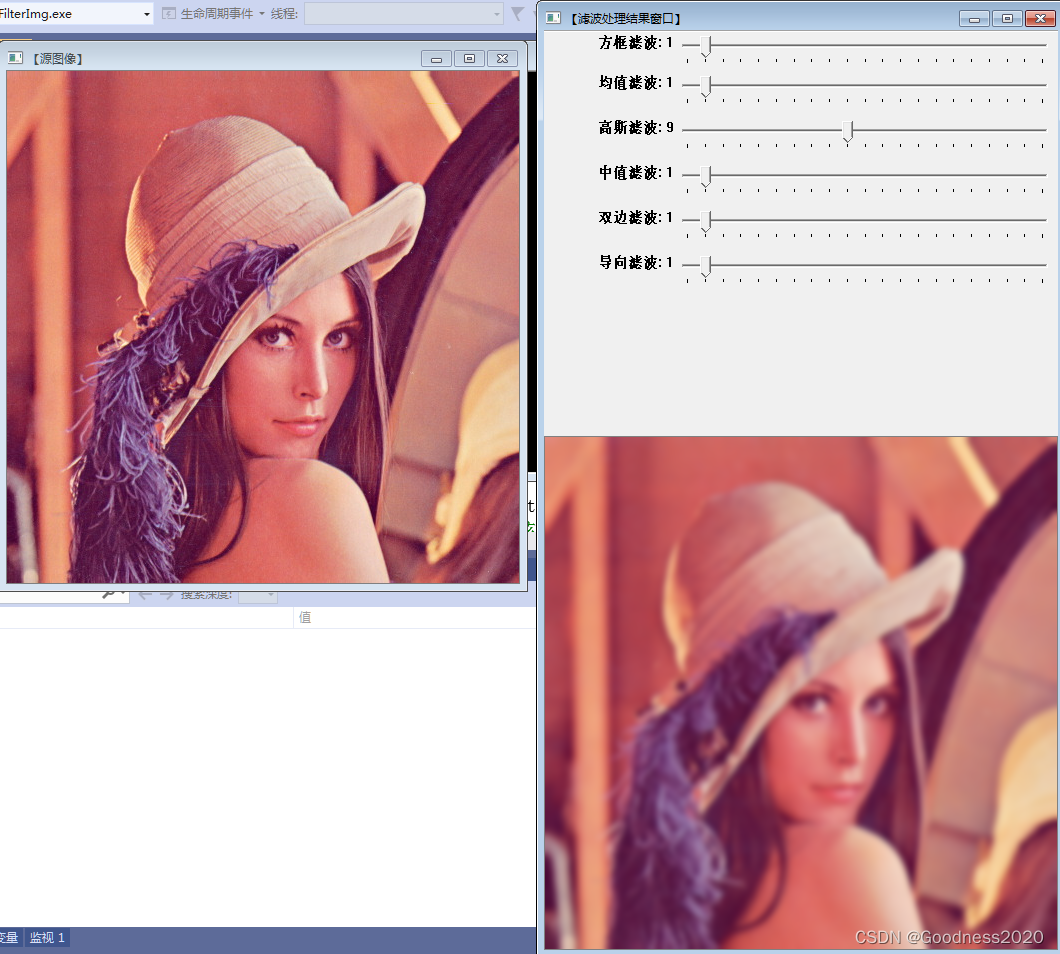
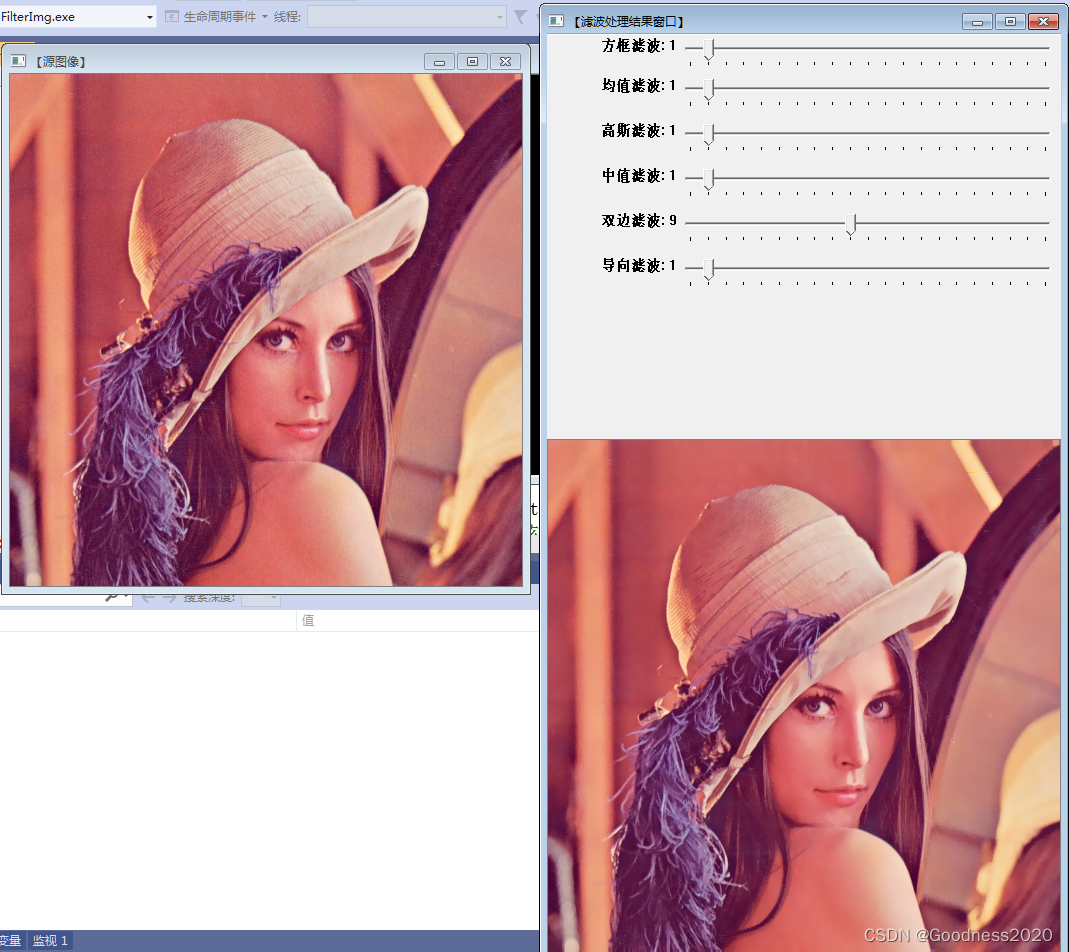
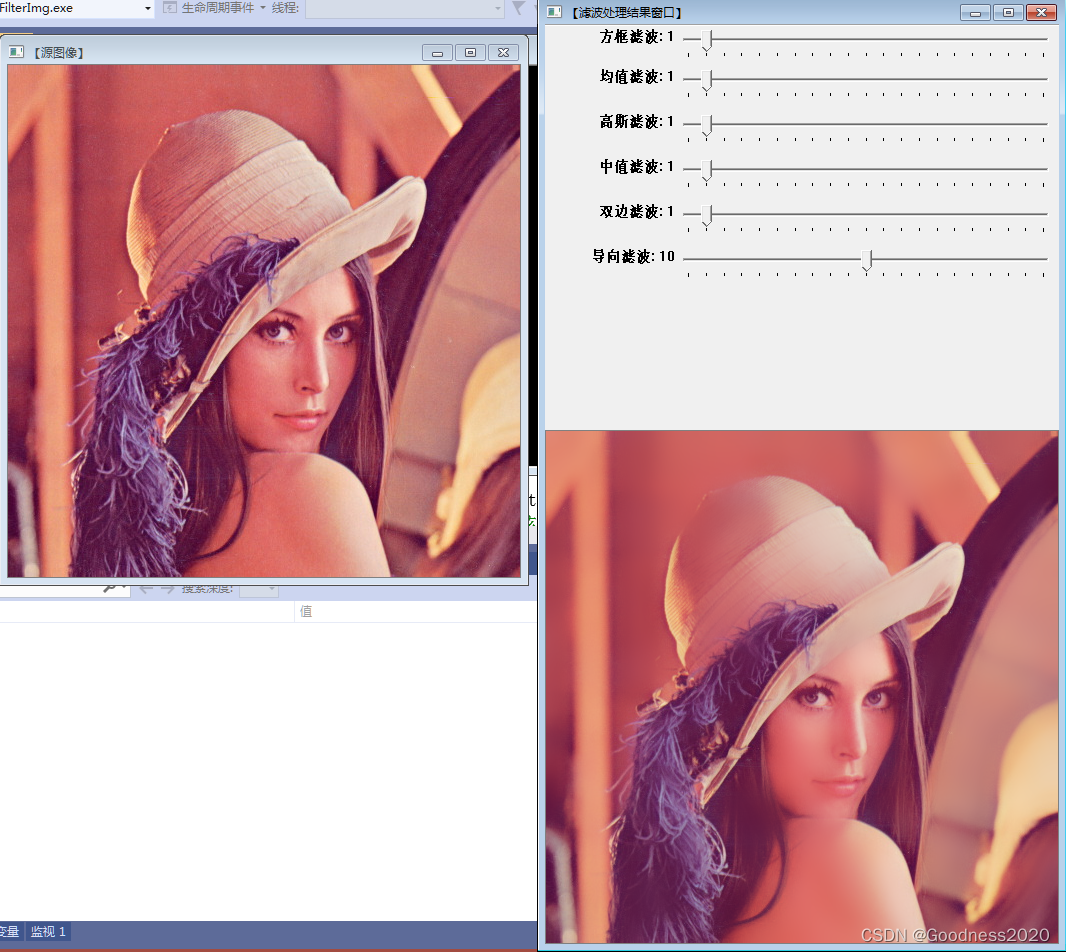
盒式滤波、均值滤波、高斯滤波、中值滤波、双边滤波、导向滤波。
boxFilter()
blur()
GaussianBlur()
medianBlur()
bilateralFilter()
二、代码
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <iostream> using namespace std;
using namespace cv;#define WINDOWNAME "【滤波处理结果窗口】" //---------------【全局变量声明部分】-------------------------
Mat g_srcIamge, g_dstImage1, g_dstImage2, g_dstImage3, g_dstImage4, g_dstImage5, g_dstImage6;
int g_nBoxFilterValue = 1; //盒式滤波内核值
int g_nMeanBlurValue = 1; //均值滤波内核值
int g_nGaussianBlurValue = 1; //高斯滤波内核值
int g_nMedianBlurValue = 1; //中值滤波内核值
int g_nBilateralFilterValue = 1; //双边滤波内核值
int g_nGuidedFilterValue = 1; //导向滤波内核值
const int g_nMaxVal = 20; //预设滑动条最大值 //--------------【全局函数声明部分】-------------------------
static void on_BoxFilter(int, void*); //盒式滤波器
static void on_MeanBlur(int, void*); //均值滤波器
static void on_GaussianBlur(int, void*); //高斯滤波器
static void on_MedianBlur(int, void*); //中值滤波器
static void on_BilateralFilter(int, void*); //双边滤波器
static void on_GuidedFilter(int, void*); //导向滤波器
void guidedFilter(Mat& srcMat, Mat& guidedMat, Mat& dstImage, int radius, double eps); //导向滤波器 //----------------------------【主函数】---------------------------
int main()
{//------------【1】读取源图像并检查图像是否读取成功------------ g_srcIamge = imread("D:\\opencv4_1_2\\opencv\\sources\\samples\\data\\lena.jpg");if (!g_srcIamge.data){cout << "读取图片错误,请重新输入正确路径!\n";system("pause");return -1;}namedWindow("【源图像】", 1); //创建窗口 imshow("【源图像】", g_srcIamge); //显示窗口 //------------【2】在WINDOWNAME窗口上分别创建滤波6个滑动条------------ namedWindow(WINDOWNAME); //创建窗口 createTrackbar("方框滤波", WINDOWNAME, &g_nBoxFilterValue, g_nMaxVal, on_BoxFilter); //创建方框滤波轨迹条 on_BoxFilter(g_nBoxFilterValue, 0);createTrackbar("均值滤波", WINDOWNAME, &g_nMeanBlurValue, g_nMaxVal, on_MeanBlur); //创建均值滤波轨迹条 on_MeanBlur(g_nMeanBlurValue, 0);createTrackbar("高斯滤波", WINDOWNAME, &g_nGaussianBlurValue, g_nMaxVal, on_GaussianBlur); //创建高斯滤波轨迹条 on_GaussianBlur(g_nGaussianBlurValue, 0);createTrackbar("中值滤波", WINDOWNAME, &g_nMedianBlurValue, g_nMaxVal, on_MedianBlur); //创建中值滤波轨迹条 on_MedianBlur(g_nMedianBlurValue, 0);createTrackbar("双边滤波", WINDOWNAME, &g_nBilateralFilterValue, g_nMaxVal, on_BilateralFilter); //创建双边滤波轨迹条 on_BilateralFilter(g_nBilateralFilterValue, 0);createTrackbar("导向滤波", WINDOWNAME, &g_nGuidedFilterValue, g_nMaxVal, on_GuidedFilter); //创建导向滤波轨迹条 on_GuidedFilter(g_nGuidedFilterValue, 0);//------------【3】退出程序------------ cout << "\t按下'q'键,退出程序~!\n" << endl;while (char(waitKey(1)) != 'q') {}return 0;
}//----------------------【on_BoxFilter()函数】------------------------
static void on_BoxFilter(int, void*)
{boxFilter(g_srcIamge, g_dstImage1, -1, Size(g_nBoxFilterValue * 2 + 1, g_nBoxFilterValue * 2 + 1));cout << "\n当前为【盒式滤波】处理效果,其内核大小为:" << g_nBoxFilterValue * 2 + 1 << endl;imshow(WINDOWNAME, g_dstImage1);
}//----------------------【on_MeanBlur()函数】------------------------
static void on_MeanBlur(int, void*)
{blur(g_srcIamge, g_dstImage2, Size(g_nMeanBlurValue * 2 + 1, g_nMeanBlurValue * 2 + 1), Point(-1, -1));cout << "\n当前为【均值滤波】处理效果,其内核大小为:" << g_nMeanBlurValue * 2 + 1 << endl;imshow(WINDOWNAME, g_dstImage2);
}//----------------------【on_GaussianBlur()函数】------------------------
static void on_GaussianBlur(int, void*)
{GaussianBlur(g_srcIamge, g_dstImage3, Size(g_nGaussianBlurValue * 2 + 1, g_nGaussianBlurValue * 2 + 1), 0, 0);cout << "\n当前为【高斯滤波】处理效果,其内核大小为:" << g_nGaussianBlurValue * 2 + 1 << endl;imshow(WINDOWNAME, g_dstImage3);
}//----------------------【on_MedianBlur()函数】------------------------
static void on_MedianBlur(int, void*)
{medianBlur(g_srcIamge, g_dstImage4, g_nMedianBlurValue * 2 + 1);cout << "\n当前为【中值滤波】处理效果,其内核大小为:" << g_nMedianBlurValue * 2 + 1 << endl;imshow(WINDOWNAME, g_dstImage4);
}//----------------------【on_BilateralFilter()函数】------------------------
static void on_BilateralFilter(int, void*)
{bilateralFilter(g_srcIamge, g_dstImage5, g_nBilateralFilterValue, g_nBilateralFilterValue * 2, g_nBilateralFilterValue / 2);cout << "\n当前为【双边滤波】处理效果,其内核大小为:" << g_nBilateralFilterValue << endl;imshow(WINDOWNAME, g_dstImage5);
}//----------------------【on_GuidedFilter()函数】------------------------
static void on_GuidedFilter(int, void*)
{vector<Mat> vSrcImage, vResultImage;//【1】对源图像进行通道分离,并对每个分通道进行导向滤波操作 split(g_srcIamge, vSrcImage);for (int i = 0; i < 3; i++){Mat tempImage;vSrcImage[i].convertTo(tempImage, CV_64FC1, 1.0 / 255.0); //将分通道转换成浮点型数据 Mat cloneImage = tempImage.clone(); //将tempImage复制一份到cloneImage Mat resultImage;guidedFilter(tempImage, cloneImage, resultImage, g_nGuidedFilterValue * 2 + 1, 0.01); //对分通道分别进行导向滤波 vResultImage.push_back(resultImage); //将分通道导向滤波后的结果存放到vResultImage中 }//【2】将分通道导向滤波后结果合并 merge(vResultImage, g_dstImage6);cout << "\n当前处理为【导向滤波】,其内核大小为:" << g_nGuidedFilterValue * 2 + 1 << endl;imshow(WINDOWNAME, g_dstImage6);
}//-------------------【实现导向滤波器函数部分】-------------------------
void guidedFilter(Mat& srcMat, Mat& guidedMat, Mat& dstImage, int radius, double eps)
{//------------【0】转换源图像信息,将输入扩展为64位浮点型,以便以后做乘法------------ srcMat.convertTo(srcMat, CV_64FC1);guidedMat.convertTo(guidedMat, CV_64FC1);//--------------【1】各种均值计算---------------------------------- Mat mean_p, mean_I, mean_Ip, mean_II;boxFilter(srcMat, mean_p, CV_64FC1, Size(radius, radius)); //生成待滤波图像均值mean_p boxFilter(guidedMat, mean_I, CV_64FC1, Size(radius, radius)); //生成导向图像均值mean_I boxFilter(srcMat.mul(guidedMat), mean_Ip, CV_64FC1, Size(radius, radius)); //生成互相关均值mean_Ip boxFilter(guidedMat.mul(guidedMat), mean_II, CV_64FC1, Size(radius, radius)); //生成导向图像自相关均值mean_II //--------------【2】计算相关系数,计算Ip的协方差cov和I的方差var------------------ Mat cov_Ip = mean_Ip - mean_I.mul(mean_p);Mat var_I = mean_II - mean_I.mul(mean_I);//---------------【3】计算参数系数a、b------------------- Mat a = cov_Ip / (var_I + eps);Mat b = mean_p - a.mul(mean_I);//--------------【4】计算系数a、b的均值----------------- Mat mean_a, mean_b;boxFilter(a, mean_a, CV_64FC1, Size(radius, radius));boxFilter(b, mean_b, CV_64FC1, Size(radius, radius));//---------------【5】生成输出矩阵------------------ dstImage = mean_a.mul(srcMat) + mean_b;
}
三、显示

相关文章:
基于opencv的几种图像滤波
一、介绍 盒式滤波、均值滤波、高斯滤波、中值滤波、双边滤波、导向滤波。 boxFilter() blur() GaussianBlur() medianBlur() bilateralFilter() 二、代码 #include <opencv2/core/core.hpp> #include <opencv2/highgui/highgui.hpp> …...
puppeteer代理的搭建和配置
puppeteer代理的搭建和配置 本文深入探讨了Puppeteer在网络爬虫和自动化测试中的重要角色,着重介绍了如何搭建和配置代理服务器,以优化Puppeteer的功能和性能。文章首先介绍了Puppeteer作为一个强大的Headless浏览器自动化工具的优势和应用场景…...
【简单认识MySQL的MHA高可用配置】
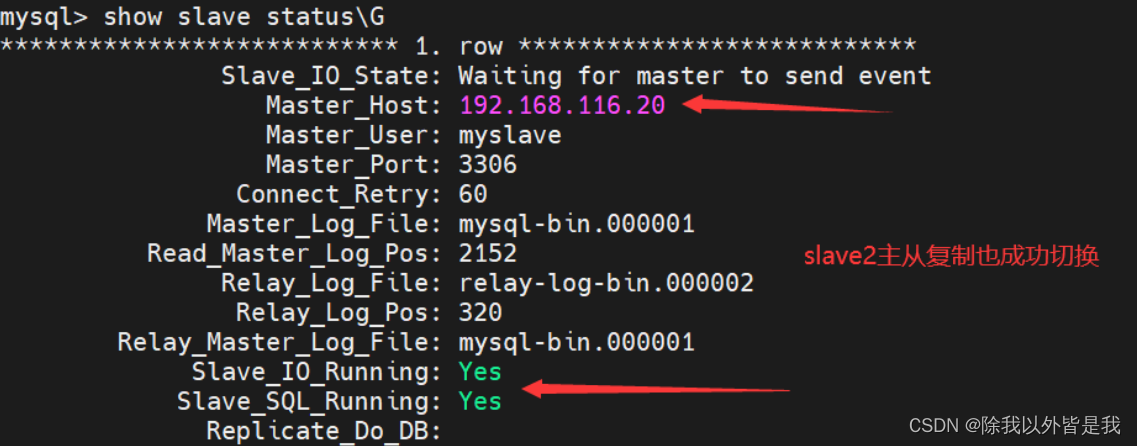
文章目录 一、简介1、概述2、MHA 的组成3.MHA 的特点4、MHA工作原理 二、搭建MHA高可用数据库群集1.主从复制2.MHA配置 三、故障模拟四、故障修复步骤: 一、简介 1、概述 MHA(Master High Availability)是一套优秀的MySQL高可用…...
【云原生】一文学会Docker存储所有特性
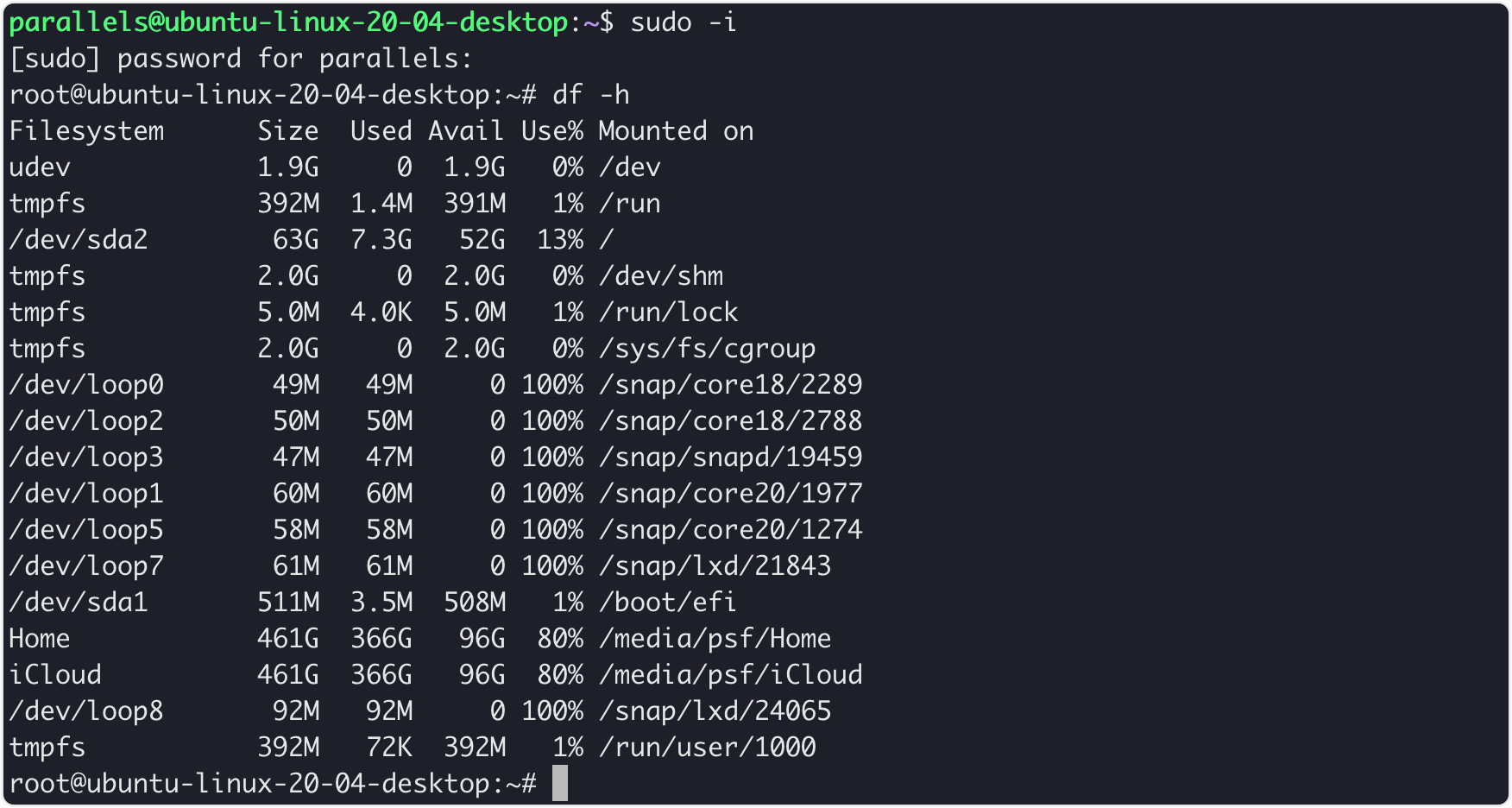
目录 1.Volumes 1.Volumes使用场景 2.持久将资源存放 3. 只读挂载 2.Bind mount Bind mounts使用场景 3.tmpfs mounts使用场景 4.Bind mounts和Volumes行为上的差异 5.docker file将存储内置到镜像中 6.volumes管理 1.查看存储卷 2.删除存储卷 3.查看存储卷的详细信息…...
Android Ble蓝牙App(一)扫描
Ble蓝牙App(一)扫描 前言正文一、基本配置二、扫描准备三、扫描页面① 增加UI布局② 点击监听③ 扫描处理④ 广播处理 四、权限处理五、扫描结果① 列表适配器② 扫描结果处理③ 接收结果 六、源码 前言 关于低功耗的蓝牙介绍我已经做过很多了࿰…...
mac pd安装ubuntu并配置远程连接
背景 一个安静的下午,我又想去折腾点什么了。准备学习一下k8s的,但是没有服务器。把我给折腾的,在抱怨了:为什么M系列芯片的资源怎么这么少。 好在伙伴说,你可以尝试一下ubantu。于是,我只好在我的mac上安…...
1.3 eureka+ribbon,完成服务注册与调用,负载均衡源码追踪
本篇继先前发布的1.2 eureka注册中心,完成服务注册的内容。 目录 环境搭建 采用eurekaribbon的方式,对多个user服务发送请求,并实现负载均衡 负载均衡原理 负载均衡源码追踪 负载均衡策略 如何选择负载均衡策略? 饥饿加载…...

mysql修改字段长度是否锁表
Varchar对于小于等于255字节以内的长度可以使用一个byte 存储。大于255个字节的长度则需要使用2个byte存储 1, 如果是255长度之内的扩展,或者255之外的扩展,则不锁表,采用in-place方式执行 2, 如果从varchar长度从(0,2…...
SpringCloud集成OpenTelemetry的实现
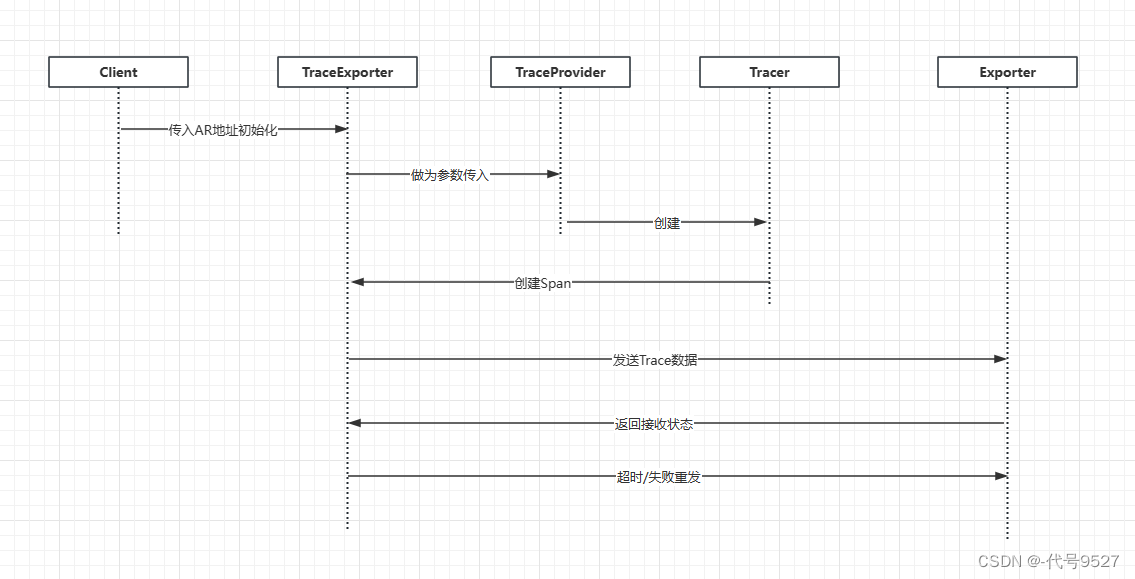
SpringCloud项目做链路追踪,比较常见的会集成SleuthZipKin来完成,但这次的需求要集成开源框架OpenTelemetry,这里整理下实现过程。相关文章: 【SpringCloud集成SleuthZipkin进行链路追踪】 【OpenTelemetry框架Trace部分整理】 …...
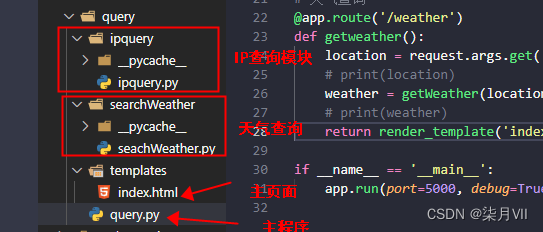
Python爬取IP归属地信息及各个地区天气信息
一、实现样式 二、核心点 1、语言:Python、HTML,CSS 2、python web框架 Flask 3、三方库:requests、xpath 4、爬取网站:https://ip138.com/ 5、文档结构 三、代码 ipquery.py import requests from lxml import etree # 请求…...
RedLock + Redisson
目录 2.9 RedLock2.9.1 上述实现的分布式锁在集群状态下失效的原因2.9.2 解决方式-RedLock 2.10 redisson中的分布式锁2.10.0 redisson简介以及简单使用简单使用redisson中的锁Redisson常用配置 2.10.1 Redisson可重入锁实现原理2.10.2 公平锁(Fair Lock)…...
计算机视觉:卷积层的参数量是多少?
本文重点 卷积核的参数量是卷积神经网络中一个重要的概念,它决定了网络的复杂度和计算量。在深度学习中,卷积操作是一种常用的操作,用于提取图像、语音等数据中的特征。卷积神经网络的优势点在于稀疏连接和权值共享,这使得卷积核的参数相较于传统的神经网络要少很多。 举例…...
Docker 容器基础操作
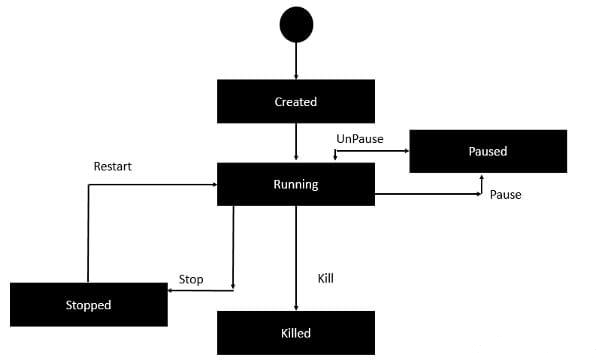
Docker容器基础操作 容器(container)是Docker镜像的运行实例,类似于可执行文件与进程的关系,Docker是容器引擎,相当于系统平台。 容器的生命周期 容器的基础操作(以 tomcat8.0 为例) # 拉取tomcat8.0镜像 [root@tudou tudou]# docker pull tomcat:8.0 8.0: Pulling f…...
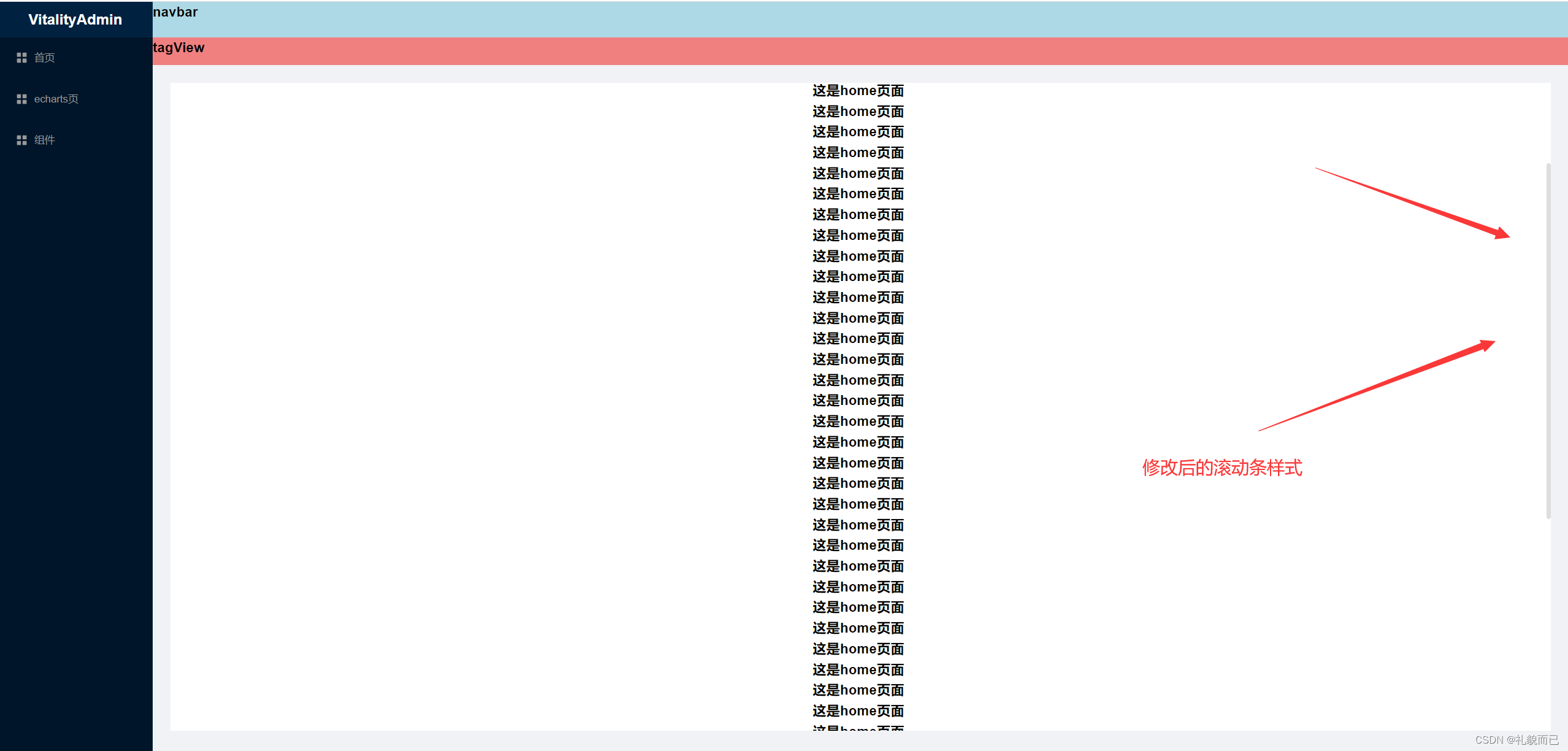
【Vue3+Ts+Vite】配置滚动条样式
一、先看效果 二、直接上代码 <template><div class"main-container"><h1 v-for"index in 50" :key"index">这是home页面</h1></div> </template> <style lang"scss" scoped> .main-conta…...

react map使用方法详解
在React中,map()方法是用于数组的常见方法之一,它可以用于处理数组并返回一个新的数组。在React中,经常使用map()方法来遍历数组,生成对应的组件列表或进行数据转换操作。 下面是map()方法在React中的使用方法详解: …...
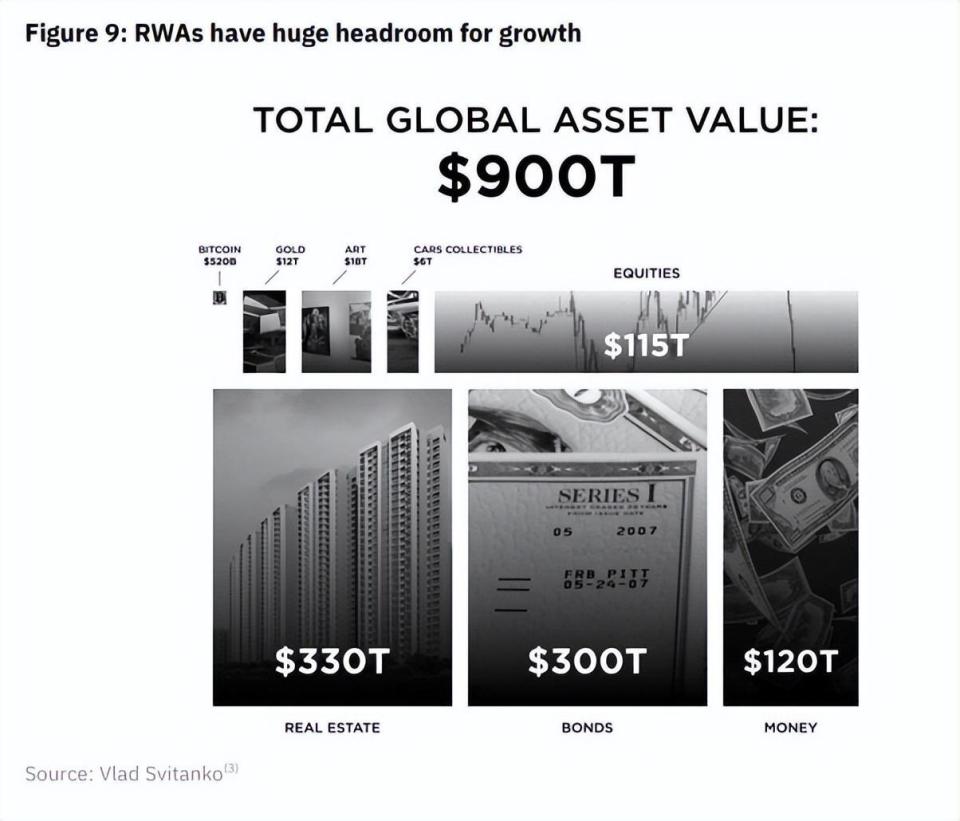
PoseiSwap:通过 RWA 的全新叙事,反哺 Nautilus Chain 生态
PoseiSwap 是 Nautilus Chain 上的首个 DEX,作为目前行业内模块化区块链叙事的早期奉行者,PoseiSwap 也得到了较高的市场关注。基于 Nautilus Chain,PoseiSwap 打造了一个全新的 Rollup 应用层,并通过零知识证明来建立全新的订单簿…...
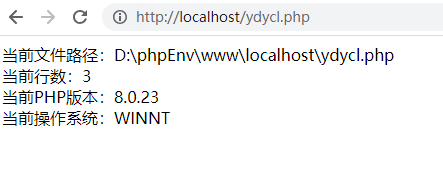
PHP8的常量-PHP8知识详解
常量和变量是构成PHP程序的基础,在PHP8中常量的这一节中,主要讲到了定义常量和预定义常量两大知识点。 一、定义常量 定义常量也叫声明常量。在PHP8中,常量就是一个标识符(名字),一旦定义(声明&…...

印花税的本质和底层逻辑是什么?印花税降低是利好股市吗?
内容由LLM协助生成: 印花税是一种对特定交易或证券交易征收的税费,由政府机构收取。其本质和底层逻辑可以归结为以下几点: 资金来源:印花税是国家财政收入的一部分,用于满足政府的财政需求和公共支出。政府通过征收印花…...

pytorch+GPU跑模型时 nvrtc: error: failed to open nvrtc-builtins64_117.dll
1.先检查自己cuda版本: print(torch.version.cuda) #查看cuda版本 print(torch.cuda.is_available()) # 查看cuda是否可用 print(torch.cuda.device_count()) # 查看可行的cuda数目如果版本高于11建议先降版本,然后再试下。 2.重新安装nvrtc-builtin…...
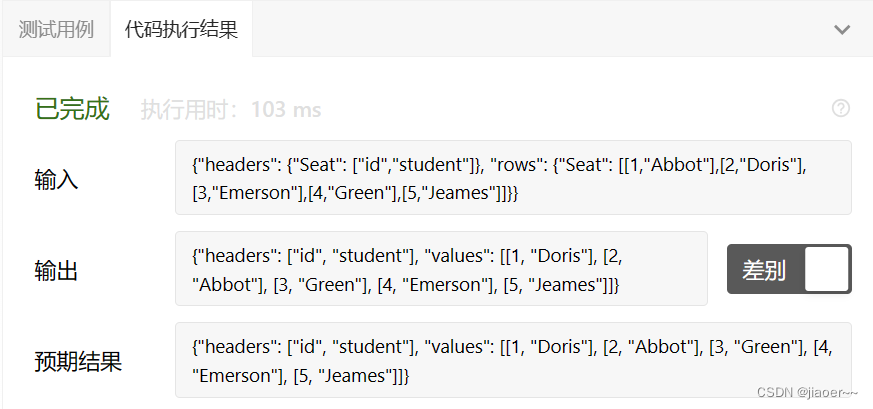
SQL-每日一题【626.换座位】
题目 表: Seat 编写SQL查询来交换每两个连续的学生的座位号。如果学生的数量是奇数,则最后一个学生的id不交换。 按 id 升序 返回结果表。 查询结果格式如下所示。 示例 1: 解题思路 前置知识 MySQL 的 MOD() 函数是取模运算的函数,它返回两个数相除…...

终极指南:3分钟学会用QMCDecode解锁QQ音乐加密格式
终极指南:3分钟学会用QMCDecode解锁QQ音乐加密格式 【免费下载链接】QMCDecode QQ音乐QMC格式转换为普通格式(qmcflac转flac,qmc0,qmc3转mp3, mflac,mflac0等转flac),仅支持macOS,可自动识别到QQ音乐下载目录,默认转换…...

盐印相不是滤镜,是光学物理建模!:深度解析Midjourney --sref 与 --style raw 联动实现银盐晶体模拟原理
更多请点击: https://codechina.net 第一章:盐印相不是滤镜,是光学物理建模! 盐印相(Salt Print)作为一种19世纪诞生的早期摄影工艺,其成像本质并非数字图像处理中的风格化滤镜,而是…...

帕鲁杯第二届应急响应:jumpserver,waf,mysql,sshserver,server01,Palu03,Palu02,每个靶机的漏洞总结
一、题目描述1.提交堡垒机中留下的flag2.提交waf中隐藏的flag3.提交mysql中留下的flag4.提交攻击者的攻击IP5.提交攻击者的最早攻击时间6.提交web服务泄露的关键文件名7.提交泄露的邮箱地址作为flag进行提交8.提交立足点服务器ip地址9.提交攻击者使用的提权用户密码10.提交攻击…...

手算反向传播:从链式法则到梯度消失的物理直觉
1. 项目概述:这不是又一节“神经网络入门”,而是一次真正踩进反向传播泥潭的实操复盘“Intro to Neural Networks Part II — Brilliant.org”这个标题乍看平平无奇,像是在线教育平台里再普通不过的一节进阶课。但如果你真点开它,…...
)
仅剩47套!2024巴洛克风格LoRA微调模型包(附11种教堂穹顶材质映射参数表)
更多请点击: https://kaifayun.com 第一章:巴洛克美学的数字重生:LoRA微调模型包发布宣言 当黄金比例遇见梯度下降,当繁复雕花邂逅低秩矩阵分解——巴洛克精神在AI时代迎来一场静默而磅礴的复兴。本次发布的 LoRA 微调模型包并非…...

编译和链接+预处理
编译(compile)和链接(link)在以前我们提到过,C语言是一门编译型的计算机语言,C语言的源代码都是文本文件,文本文件本身无法运行,电脑不能执行C语言代码,计算机能够执行的…...

Python项目框架解析
...

Heavy Fighter动画包:Unity战斗系统根运动与状态机深度解析
1. 这套动画包不是“拿来就能用”的资源,而是需要你亲手校准的战斗系统骨架我在2021年接手一个横版ARPG项目时,美术总监甩给我三套Mecanim动画包,其中一套就是Heavy Fighter Mecanim Animation Pack。当时我第一反应是“终于不用手调IK了”&a…...

影刀RPA跨境店群运营架构:Python协同Chromium底层调度与高并发容器化实战
定了。在跨境电商自动化的技术角斗场里,我们终于打破了“商业指纹浏览器单机RPA”的低效垄断,实现了一套足以支撑万级店铺矩阵的分布式微服务调度架构。 这几天,科技圈被“DeepSeek V4 首发华为昇腾芯片,国产 AI 开始打破英伟达 …...

物理标签退场,视觉原生上位:UWB vs 镜像视界无感定位・空间智能重构
物理标签退场,视觉原生上位:UWB vs 镜像视界无感定位・空间智能重构在空间智能加速重构物理世界的当下,全域感知技术正经历一场从“物理标签”到“视觉原生”的底层范式革命。长期以来,以UWB(超宽带)为代表…...