【C++】开源:Linux端V4L2视频设备库
😏★,°:.☆( ̄▽ ̄)/$:.°★ 😏
这篇文章主要介绍Linux端V4L2视频设备库。
无专精则不能成,无涉猎则不能通。——梁启超
欢迎来到我的博客,一起学习,共同进步。
喜欢的朋友可以关注一下,下次更新不迷路🥞
文章目录
- :smirk:1. 项目介绍
- :blush:2. 环境配置
- :satisfied:3. 使用说明
😏1. 项目介绍
Video4Linux2(V4L2)是一个用于Linux操作系统的视频设备驱动框架。它提供了一个统一的接口,用于在应用程序和视频设备之间进行通信和交互。
V4L2支持各种类型的视频设备,包括USB摄像头、摄像机、TV调谐器、网络摄像头等。通过使用V4L2,开发者可以轻松地访问和控制视频设备,以捕获视频流、调整图像参数、设置视频格式和分辨率等。
以下是V4L2的一些重要特点和概念:
1.设备节点:每个视频设备在Linux系统中都表示为一个设备节点,通常位于/dev/video*路径下。应用程序通过打开这些设备节点来访问相应的视频设备。
2.视频捕捉:V4L2允许应用程序从视频设备中捕获视频帧或图像。它提供了一系列的API函数,使应用程序能够请求存储视频帧的缓冲区,并在设备准备好时将其读取到内存中。
3.视频输出:除了捕获视频,V4L2还支持将视频数据发送到视频设备,以便在外部显示设备上进行输出。应用程序可以将视频帧写入输出缓冲区,并通过相应的IOCTL调用将其发送到视频设备。
4.控制和参数设置:V4L2允许应用程序对视频设备进行控制和配置。例如,应用程序可以设置摄像头的亮度、对比度、饱和度等参数,选择摄像头的输入源,设置视频格式和分辨率等。
5.帧缓冲管理:V4L2通过Frame Buffer子系统来管理视频帧的缓冲区。它提供了API函数来请求和管理用于存储视频帧的缓冲区,并进行帧缓冲的交换和处理。
😊2. 环境配置
下面进行环境配置:
# v4l2是linux内核的一部分,只需安装开发库
sudo apt-get install libv4l-dev
# 使用v4l2开发
# 在应用程序中使用 #include <linux/videodev2.h> 来引入V4L2的头文件,并使用相关的API函数
😆3. 使用说明
下面进行使用分析:
基于v4l2调用usb摄像头并用opencv显示示例:
#include <iostream>
#include <cstdlib>
#include <cstring>
#include <fcntl.h>
#include <unistd.h>
#include <sys/ioctl.h>
#include <sys/mman.h> //共享内存
#include <linux/videodev2.h>
#include <opencv2/opencv.hpp>#define WIDTH 640
#define HEIGHT 480int main() {int fd;struct v4l2_capability cap;struct v4l2_format fmt;struct v4l2_requestbuffers req;struct v4l2_buffer buf;enum v4l2_buf_type type;// 打开摄像头设备fd = open("/dev/video0", O_RDWR);if (fd == -1) {std::cerr << "无法打开摄像头设备" << std::endl;return 1;}// 查询摄像头能力if (ioctl(fd, VIDIOC_QUERYCAP, &cap) == -1) {std::cerr << "无法查询摄像头能力" << std::endl;close(fd);return 1;}// 设置视频格式memset(&fmt, 0, sizeof(fmt));fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;fmt.fmt.pix.width = WIDTH;fmt.fmt.pix.height = HEIGHT;fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_YUYV; // YUV格式if (ioctl(fd, VIDIOC_S_FMT, &fmt) == -1) {std::cerr << "无法设置视频格式" << std::endl;close(fd);return 1;}// 请求视频缓冲区memset(&req, 0, sizeof(req));req.count = 1;req.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;req.memory = V4L2_MEMORY_MMAP;if (ioctl(fd, VIDIOC_REQBUFS, &req) == -1) {std::cerr << "无法请求视频缓冲区" << std::endl;close(fd);return 1;}// 映射视频缓冲区到用户空间struct v4l2_buffer* buffers = new v4l2_buffer[req.count];void** frame_buffers = new void*[req.count];for (int i = 0; i < req.count; i++) {memset(&buf, 0, sizeof(buf));buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;buf.memory = V4L2_MEMORY_MMAP;buf.index = i;if (ioctl(fd, VIDIOC_QUERYBUF, &buf) == -1) {std::cerr << "无法查询视频缓冲区" << std::endl;close(fd);return 1;}frame_buffers[i] = mmap(NULL, buf.length, PROT_READ | PROT_WRITE, MAP_SHARED, fd, buf.m.offset);if (frame_buffers[i] == MAP_FAILED) {std::cerr << "无法映射视频缓冲区到用户空间" << std::endl;close(fd);return 1;}}// 入队视频缓冲区for (int i = 0; i < req.count; i++) {memset(&buf, 0, sizeof(buf));buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;buf.memory = V4L2_MEMORY_MMAP;buf.index = i;if (ioctl(fd, VIDIOC_QBUF, &buf) == -1) {std::cerr << "无法入队视频缓冲区" << std::endl;close(fd);return 1;}}// 开始视频流采集type = V4L2_BUF_TYPE_VIDEO_CAPTURE;if (ioctl(fd, VIDIOC_STREAMON, &type) == -1) {std::cerr << "无法开始视频流采集" << std::endl;close(fd);return 1;}// 循环获取并显示相机数据cv::Mat frame(HEIGHT, WIDTH, CV_8UC2);cv::namedWindow("Camera", cv::WINDOW_AUTOSIZE);while (true) {// 出队视频缓冲区memset(&buf, 0, sizeof(buf));buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;buf.memory = V4L2_MEMORY_MMAP;if (ioctl(fd, VIDIOC_DQBUF, &buf) == -1) {std::cerr << "无法出队视频缓冲区" << std::endl;close(fd);return 1;}// 处理相机数据(这里只是简单地将YUYV格式的数据转换为RGB格式)cv::cvtColor(cv::Mat(HEIGHT, WIDTH, CV_8UC2, frame_buffers[buf.index]), frame, cv::COLOR_YUV2BGR_YUYV);// 显示相机数据cv::imshow("Camera", frame);if (cv::waitKey(1) == 27) {break; // 按下Esc键退出循环}// 再次入队视频缓冲区if (ioctl(fd, VIDIOC_QBUF, &buf) == -1) {std::cerr << "无法再次入队视频缓冲区" << std::endl;close(fd);return 1;}}// 停止视频流采集type = V4L2_BUF_TYPE_VIDEO_CAPTURE;if (ioctl(fd, VIDIOC_STREAMOFF, &type) == -1) {std::cerr << "无法停止视频流采集" << std::endl;close(fd);return 1;}// 解除映射视频缓冲区for (int i = 0; i < req.count; i++) {munmap(frame_buffers[i], buf.length);}// 关闭摄像头设备close(fd);delete[] buffers;delete[] frame_buffers;return 0;
}
编译运行:
g++ -o main main.cpp `pkg-config --libs opencv`
./main

以上。
相关文章:
【C++】开源:Linux端V4L2视频设备库
😏★,:.☆( ̄▽ ̄)/$:.★ 😏 这篇文章主要介绍Linux端V4L2视频设备库。 无专精则不能成,无涉猎则不能通。——梁启超 欢迎来到我的博客,一起学习,共同进步。 喜欢的朋友可以关注一下,下…...

基于数据驱动的多尺度表示的信号去噪统计方法研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

【Golang】Golang进阶系列教程--Go 语言 map 如何顺序读取?
文章目录 前言现象原因如何顺序读取推荐阅读 前言 Go 语言中的 map 是一种非常强大的数据结构,它允许我们快速地存储和检索键值对。 然而,当我们遍历 map 时,会有一个有趣的现象,那就是输出的键值对顺序是不确定的。 现象 先看…...
伊语IM即时通讯源码/im商城系统/纯源码IM通讯系统安卓+IOS前端纯原生源码
伊语IM即时通讯源码/im商城系统/纯源码IM通讯系统安卓IOS前端纯原生源码, 后端是java源码。...

C++推理
YOLOv5 OpenCV DNN C导出的 ONNX 模型示例的推理: https://github.com/Hexmagic/ONNX-yolov5/blob/master/src/test.cpphttps://github.com/doleron/yolov5-opencv-cpp-python YOLOv5 OpenVINO C推理示例: GitHub - dacquaviva/yolov5-openvino-cpp-p…...
Day10-作业(SpringBootWeb案例)
作业1:完成课上预留给大家自己完成的功能 【部门管理的修改功能】 注意: 部门管理的修改功能,需要开发两个接口: 先开发根据ID查询部门信息的接口,该接口用户查询数据并展示 。(一定一定先做这个功能) 再开发根据ID…...

源码阅读:p-limit
源码阅读:p-limit 源码阅读:p-limit简介源码解读学习与收获 源码阅读:p-limit 简介 p-limit是一个用于限制并发操作的包,它可以控制同时执行的异步操作数量。它提供了一种简单的方式来管理并发操作,以避免系统资源过…...

目标检测-击穿黑夜的PE-YOLO
前言 当前的目标检测模型在许多基准数据集上取得了良好的结果,但在暗光条件下检测目标仍然是一个巨大的挑战。为了解决这个问题,作者提出了金字塔增强网络(PENet)并将其与YOLOv3结合,构建了一个名为PE-YOLO的暗光目标检…...

优化性能压力测试的关键策略和技巧
在现代软件开发中,性能压力测试是不可或缺的一环。它可以帮助开发团队评估系统在负载压力下的性能表现,识别潜在的性能瓶颈,并采取适当的措施进行优化。然而,仅仅进行性能压力测试是不够的,关键的在于如何优化测试的过…...
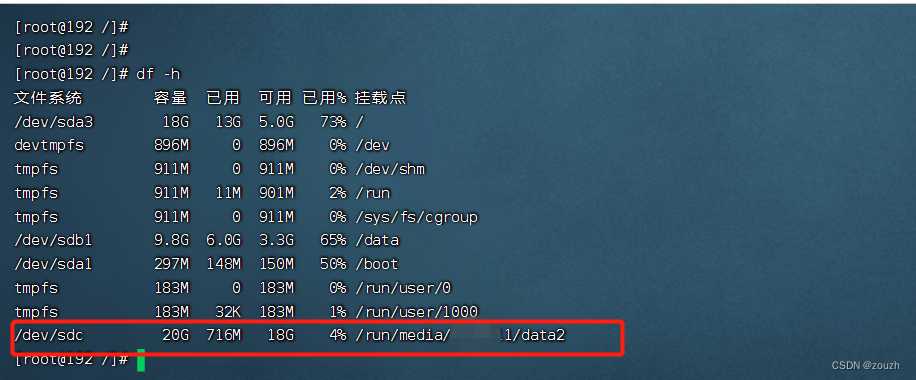
VMware Linux 可视化增加磁盘
1、VMware 增加磁盘 2、disks挂载磁盘 此处我挂载的是20G磁盘,截图只是用5G的做过程演示例子。 3、验证挂载磁盘...

从 axios 源码学习设计模式
文章目录 一、源码分析1.1 axios 为什么可以多种方式调用1.2 拦截器实现注册使用:promise链式调用 二、从 axios 看设计模式axios 的精髓在哪2.1 抽象工厂axios.create -- 创建新实例的工厂 2.2 微内核设计2.3 适配器思想2.4 责任链模式2.5 桥接模式举例:…...

输出不同程序执行的时间
简单的测试工具代码,它可以输出不同程序执行的时间。我们可以使用Python的time模块来实现这个功能。 import timedef test_function(func, *args, **kwargs):"""测试函数执行时间的工具函数:param func: 待测试的函数:param *args: 函数的位置参数:…...

HDU 6391 组合数学 + DP
题意 传送门 HDU 6391 Lord Li’s problem 题解 仅考虑 S i ≠ T i S_i\neq T_i SiTi 的数量 m m m,最后答案除以 ( n m ) \binom{n}{m} (mn) 即可。考虑 X X X 的排列,最后答案除以 k ! k! k! 即可。 d p [ i 1 ] [ j ] dp[i1][j] dp[…...

StopWatch与ThreadLocal
目录 1、StopWatch 1、1作用: 1、2方法: 1、3使用方法 2、ThreadLocal 2、1什么是ThreadLocal 2、2简单例子 2、3使用ThreadLocal带来的四个好处 2、4主要方法 2、5ThreadLocal内存泄漏问题 1、StopWatch 1、1作用: 统计代码块耗时时…...

20. 有效的括号
给定一个只包括 (,),{,},[,] 的字符串 s ,判断字符串是否有效。 有效字符串需满足: 左括号必须用相同类型的右括号闭合。 左括号必须以正确的顺序闭合。 每个右括号都有一个对应的相同类型的左括…...
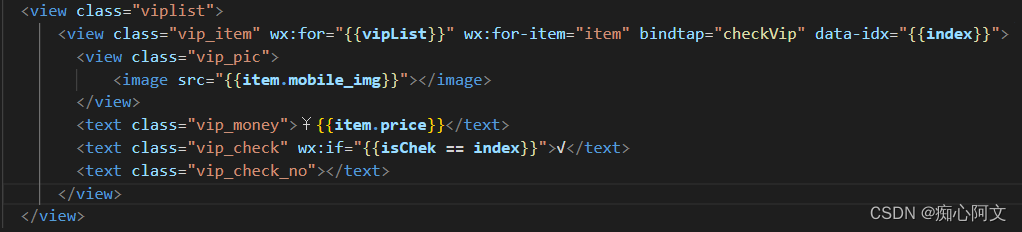
微信小程序原生写法传递参数
微信小程序原生写法传递参数 data-xxx 自定义参数名 ,接收参数:方法(变量名) checkVip:function(event) {let that thisconsole.log(event,event)console.log(event.currentTarget.dataset.idx,index)let index Number(eve…...

JavaWeb+jsp+Tomcat的教务查询系统
点击以下链接获取源码: https://download.csdn.net/download/qq_64505944/88134601?spm1001.2014.3001.5503 jsp/tomcat7.05/MySQL5.7或8版本/ssm框架/spring/ Web框架:SpringBoot/ORM框架:Mybatis/安全框架:Shiro/分页插件&am…...

C# FTP下载 采用Ssh.Net方式
不要再用FTPClient了 nuget下载Ssh.Net 然后代码如下: /// <summary>/// SFTP操作类/// </summary>public class SFTPHelper{#region 字段或属性private SftpClient sftp;/// <summary>/// SFTP连接状态/// </summary>public bool Conne…...
【C++】做一个飞机空战小游戏(三)——模块化程序设计
[导读]本系列博文内容链接如下: 【C】做一个飞机空战小游戏(一)——使用getch()函数获得键盘码值 【C】做一个飞机空战小游戏(二)——利用getch()函数实现键盘控制单个字符移动【C】做一个飞机空战小游戏(三)——模块化程设设计 在前两讲当中,介绍了利用…...
Django使用WebSocket
1、websocket 相关 实现一个系统,20 个用户同时打开网站,呈现出来一个群聊界面 解决方案 轮询:让浏览器每隔2s向后台发送一次请求,缺点:延迟,请求太多网站压力大 长轮询:客户端向服务端发送请…...

从零打造会“看”的电子眼:Teensy与OLED的嵌入式图形与传感器实践
1. 项目概述:打造一个会“看”的电子生命体几年前,我第一次在创客社区看到“Uncanny Eyes”项目时就被深深吸引了。一个微小的OLED屏幕,在代码驱动下,竟然能呈现出如此逼真、灵动的眼球运动,那种介于生命与机械之间的诡…...

Lua-RTOS-ESP32:用脚本语言快速开发物联网硬件的实践指南
1. 项目概述:当Lua遇上RTOS,在ESP32上构建轻量级物联网开发新范式如果你是一名嵌入式开发者,或者对物联网(IoT)设备编程感兴趣,那么你一定对ESP32这颗明星芯片不陌生。它凭借强大的双核处理能力、丰富的无线…...

Cursor-Tap插件:一键AI代码重构与文档生成实战指南
1. 项目概述:一个为 Cursor 编辑器注入灵魂的插件如果你和我一样,日常重度依赖 Cursor 这款 AI 驱动的代码编辑器,那你一定体会过那种“就差一点”的微妙感受。Cursor 的 AI 能力确实强大,但它的交互方式有时会让人感觉像是在和一…...

Godot引擎实验项目解析:从角色控制到着色器优化的实战指南
1. 项目概述与核心价值如果你是一名游戏开发者,尤其是对独立游戏开发充满热情,那么“Godot”这个名字对你来说一定不陌生。它是一个功能强大、开源免费的游戏引擎,以其轻量、高效和友好的编辑器而闻名。然而,引擎本身只是一个工具…...

Arm Cortex-A35 Cycle Model技术解析与SoC集成实战
1. Arm Cortex-A35 Cycle Model技术解析在SoC设计领域,虚拟平台验证已成为不可或缺的关键环节。作为Armv8-A架构中的能效比优化核心,Cortex-A35处理器通过Cycle Model提供了RTL级精度的硬件行为模拟能力。我在多个车载SoC项目中验证发现,其Cy…...

动态提示词工程:让AI提示词具备上下文学习能力的实践指南
1. 项目概述:当提示词遇上上下文学习最近在折腾大语言模型应用时,我反复遇到一个痛点:精心设计的提示词(Prompt)在特定任务上效果拔群,但换个场景或数据,效果就大打折扣。每次都得重新调整、测试…...

Linux权限继承与umask配置实践
Linux权限继承与umask配置实践很多协作目录问题并不是因为当前权限错了,而是因为新建文件的默认权限总是不符合预期。背后的核心变量之一就是 umask。中级阶段如果不理解默认权限是怎么生成的,就会陷入“每次都手工 chmod”的低效循环。一、默认权限不是…...

会话管理封装实践:构建安全可扩展的分布式会话系统
1. 项目概述:一个被低估的会话管理利器如果你是一名开发者,尤其是经常需要处理用户登录、权限校验、状态保持这类“脏活累活”的后端或全栈开发者,那么你一定对“会话管理”这四个字又爱又恨。爱的是,它是构建安全、有状态应用的基…...

FinalBurn Neo:终极开源街机模拟器技术深度解析
FinalBurn Neo:终极开源街机模拟器技术深度解析 【免费下载链接】FBNeo FinalBurn Neo - We are Team FBNeo. 项目地址: https://gitcode.com/gh_mirrors/fb/FBNeo FinalBurn Neo(简称FBNeo)是一款专业级的开源街机模拟器,…...
)
别再手动折腾了!用Docker Compose 5分钟搞定ChirpStack LoRaWAN服务器部署(附配置文件详解)
5分钟极速部署ChirpStack LoRaWAN服务器的Docker Compose实战指南 1. 为什么选择Docker Compose部署ChirpStack? 对于物联网开发者而言,时间就是最宝贵的资源。传统的手动部署方式需要逐个安装和配置PostgreSQL、Redis、MQTT broker以及ChirpStack各个组…...