LED灯的驱动,GPIO子系统,添加按键的中断处理
1.应用程序发送指令控制LED亮灭
2.按键1 按下,led1电位反转 按键2按下,led2电位反转 按键3 按下,led3电位反转
驱动程序:
#include <linux/init.h>
#include <linux/module.h>
#include<linux/of.h>
#include<linux/of_irq.h>
#include<linux/interrupt.h>
#include <linux/of_gpio.h>
#include <linux/gpio.h>unsigned int major;
struct class *cls;
struct device *dev;struct device_node *dev_led;
struct device_node *dev_key;unsigned int irqno1;
unsigned int irqno2;
unsigned int irqno3;struct gpio_desc *gpiono1;
struct gpio_desc *gpiono2;
struct gpio_desc *gpiono3;//功能码
#define LED_ON _IOW('l', 1, int)
#define LED_OFF _IOW('l', 0, int)//中断处理函数
irqreturn_t my_handler1(int irq, void *dev) //key1
{//灯状态取反gpiod_set_value(gpiono1, !gpiod_get_value(gpiono1));return IRQ_HANDLED;
}irqreturn_t my_handler2(int irq, void *dev) //key2
{//灯状态取反gpiod_set_value(gpiono2, !gpiod_get_value(gpiono2));return IRQ_HANDLED;
}irqreturn_t my_handler3(int irq, void *dev) //key3
{//灯状态取反gpiod_set_value(gpiono3, !gpiod_get_value(gpiono3));return IRQ_HANDLED;
}// 封装操作方法
int mycdev_open(struct inode *inode, struct file *file)
{printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);return 0;
}long mycdev_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
{switch (cmd){case LED_ON:switch (arg){case 1: // LED1gpiod_set_value(gpiono1, 1); // LED1开灯break;case 2: // LED2gpiod_set_value(gpiono2, 1); // LED2开灯break;case 3: // LED3gpiod_set_value(gpiono3, 1); // LED3开灯break;}break;case LED_OFF:switch (arg){case 1:gpiod_set_value(gpiono1, 0);break;case 2:gpiod_set_value(gpiono2, 0);break;case 3:gpiod_set_value(gpiono3, 0);break;}}return 0;
}int mycdev_close(struct inode *inode, struct file *file)
{printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);return 0;
}//定义操作方法结构体变量并赋值
struct file_operations fops = {.open = mycdev_open,.unlocked_ioctl = mycdev_ioctl,.release = mycdev_close,
};static int __init mycdev_init(void)
{int ret;int i;//***************字符设备***************//// 字符设备驱动注册major = register_chrdev(0, "mychrdev", &fops);if (major < 0){printk("字符设备驱动注册失败\n");return major;}printk("字符设备驱动注册成功:major=%d\n", major);//向上提交目录cls = class_create(THIS_MODULE, "myled");if (IS_ERR(cls)){printk("向上提交目录失败\n");return -PTR_ERR(cls);}printk("向上提交目录成功\n");//向上提交设备节点信息for (i = 0; i < 3; i++){dev = device_create(cls, NULL, MKDEV(major, i), NULL, "myled%d", i);if (IS_ERR(dev)){printk("向上提交设备节点信息失败\n");return -PTR_ERR(dev);}}printk("向上提交设备节点成功\n");//*************LED**************//// 根据设备树节点的路径解析设备树信息dev_led = of_find_node_by_path("/leds");if (dev_led == NULL){printk("解析设备树节点失败\n");return -EFAULT;}printk("解析设备树节点成功\n");// 根据解析得到的设备树节点指针解析出LED1的gpio编号gpiono1 = gpiod_get_from_of_node(dev_led, "led1-gpios", 0, GPIOD_OUT_LOW, NULL);if (IS_ERR(gpiono1)){printk("解析gpio编号失败\n");return -PTR_ERR(gpiono1);}gpiono2 = gpiod_get_from_of_node(dev_led, "led2-gpios", 0, GPIOD_OUT_LOW, NULL);if (IS_ERR(gpiono2)){printk("解析gpio编号失败\n");return -PTR_ERR(gpiono2);}gpiono3 = gpiod_get_from_of_node(dev_led, "led3-gpios", 0, GPIOD_OUT_LOW, NULL);if (IS_ERR(gpiono3)){printk("解析gpio编号失败\n");return -PTR_ERR(gpiono3);}//*************KEY**************//// 根据设备树节点的路径解析设备树信息dev_key = of_find_node_by_path("/myirq");if (dev_key == NULL){printk("解析设备树节点失败\n");return -EFAULT;}printk("解析设备树节点成功\n");//*****KEY1*******////根据设备树节点,解析软中断号irqno1 = irq_of_parse_and_map(dev_key, 0); //按键1索引号为 0if(!irqno1){printk("解析软中断号失败\n");return -ENXIO;}printk("解析软中断号成功 irqno1=%d\n", irqno1);//注册中断ret = request_irq(irqno1, my_handler1, IRQF_TRIGGER_FALLING, "key1", NULL);if(ret){printk("注册中断失败\n");return -EFAULT;}printk("KEY1注册中断成功\n");//*****KEY2*******////根据设备树节点,解析软中断号irqno2 = irq_of_parse_and_map(dev_key, 1); //按键2索引号为 1if(!irqno2){printk("解析软中断号失败\n");return -ENXIO;}printk("解析软中断号成功 irqno2=%d\n", irqno2);//注册中断ret = request_irq(irqno2, my_handler2, IRQF_TRIGGER_FALLING, "key2", NULL);if(ret){printk("注册中断失败\n");return -EFAULT;}printk("KEY2注册中断成功\n");//*****KEY3*******////根据设备树节点,解析软中断号irqno3 = irq_of_parse_and_map(dev_key, 2); //按键3索引号为 2if(!irqno3){printk("解析软中断号失败\n");return -ENXIO;}printk("解析软中断号成功 irqno3=%d\n", irqno3);//注册中断ret = request_irq(irqno3, my_handler3, IRQF_TRIGGER_FALLING, "key3", NULL);if(ret){printk("注册中断失败\n");return -EFAULT;}printk("KEY3注册中断成功\n");return 0;
}static void __exit mycdev_exit(void)
{//销毁节点信息int i;for (i = 0; i < 3; i++){device_destroy(cls, MKDEV(major, i));}//销毁目录信息class_destroy(cls);// 注销字符设备驱动unregister_chrdev(major, "mychrdev");//注销中断free_irq(irqno1, NULL);free_irq(irqno2, NULL);free_irq(irqno3, NULL);// 灭灯gpiod_set_value(gpiono1, 0);gpiod_set_value(gpiono2, 0);gpiod_set_value(gpiono3, 0);// 释放gpio编号gpiod_put(gpiono1);gpiod_put(gpiono2);gpiod_put(gpiono3);}module_init(mycdev_init);
module_exit(mycdev_exit);
MODULE_LICENSE("GPL");
应用层程序:
#include <stdlib.h>
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
#include <sys/ioctl.h>
//功能码
#define LED_ON _IOW('l', 1, int)
#define LED_OFF _IOW('l', 0, int)int main(int argc, char const *argv[])
{int a, b;int fd = open("/dev/myled0", O_RDWR);if (fd < 0){printf("打开设备文件失败\n");exit(-1);}while (1){printf("请输入指令\n");printf("0(关灯) 1(开灯)\n");printf("请输入:");scanf("%d", &a);printf("请输入要控制的灯 1(LED1) 2(LED2) 3(LED3):");scanf("%d", &b);switch (a){case 1:ioctl(fd, LED_ON, b); //开灯break;case 0:ioctl(fd, LED_OFF, b); //关灯break;default:printf("输入错误\n");break;}}close(fd);return 0;
}相关文章:

LED灯的驱动,GPIO子系统,添加按键的中断处理
1.应用程序发送指令控制LED亮灭 2.按键1 按下,led1电位反转 按键2按下,led2电位反转 按键3 按下,led3电位反转 驱动程序: #include <linux/init.h> #include <linux/module.h> #include<linux/of.h> #include…...

Gradle和Maven的区别
Gradle和Maven 当涉及到构建和管理项目时,Gradle和Maven是两个非常流行的选项。本文将讨论Gradle和Maven之间的区别以及它们的配置信息差异。 1. Gradle和Maven的区别 1.1 构建脚本语言 Maven使用XML作为构建脚本语言,而Gradle使用基于Groovy的DSL&…...
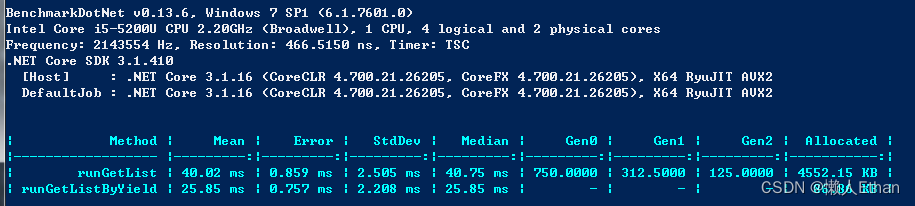
C#中 使用yield return 优化大数组或集合的访问
概要 我们在开发过程中,经常需要在一个很大的数组或集合中搜索元素,以满足业务需求。 本文主要介绍通过使用yield return的方式,避免将大量数据全部加载进入内存,再进行处理。从而提高程序的性能。 设计和实现 基本业务场景&a…...
)
ROS实现导航中止(pub命令版+C++代码版)
pub命令 rostopic pub /move_base/cancel actionlib_msgs/GoalID -- {}C代码: stop_navigation.cpp #include <ros/ros.h> #include <geometry_msgs/Twist.h> #include <nav_msgs/Odometry.h> #include <sys/time.h> #include <unistd…...
【VTK】读取一个 STL 文件,并使用 Qt 显示出来,在 Windows 上使用 Visual Studio 配合 Qt 构建 VTK
知识不是单独的,一定是成体系的。更多我的个人总结和相关经验可查阅这个专栏:Visual Studio。 文章目录 A.hA.cppRef. 直接先把效果放出来,有需要就往下看。 A.h // A.h #pragma once#include <QtWidgets/QMainWindow> #include "…...
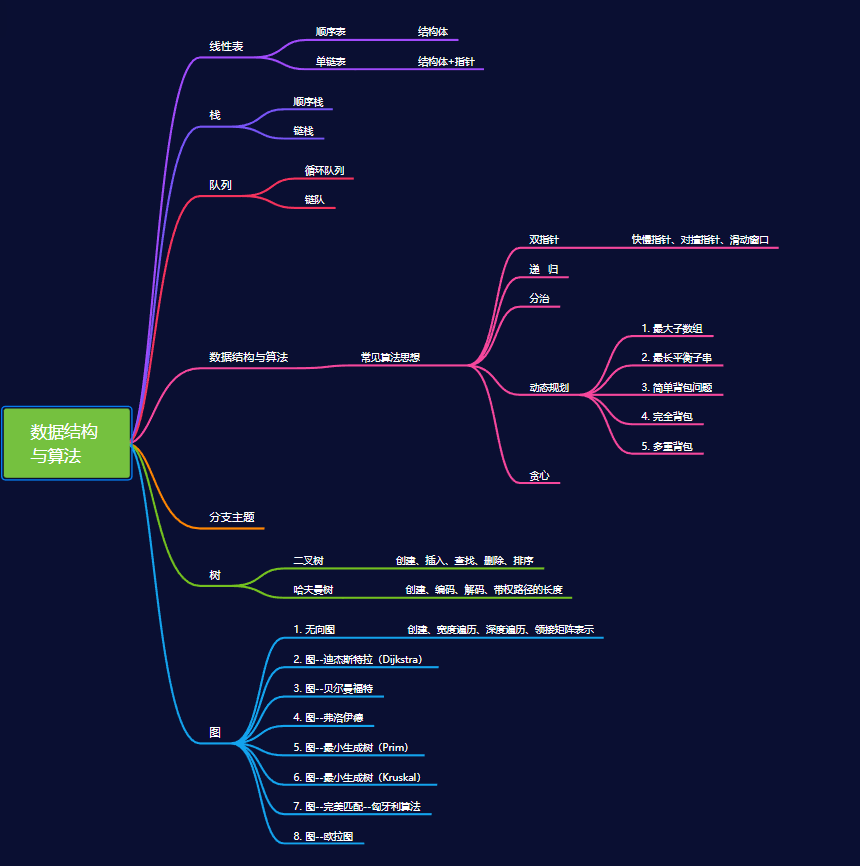
数据结构--基础知识
数据结构是什么? 数据结构是计算机科学中研究数据组织、存储和管理的方法和原则。它涉及存储和操作数据的方式,以便能够高效地使用和访问数据。 相关内容 基本组成 数组(Array):数组是一种线性数据结构,…...
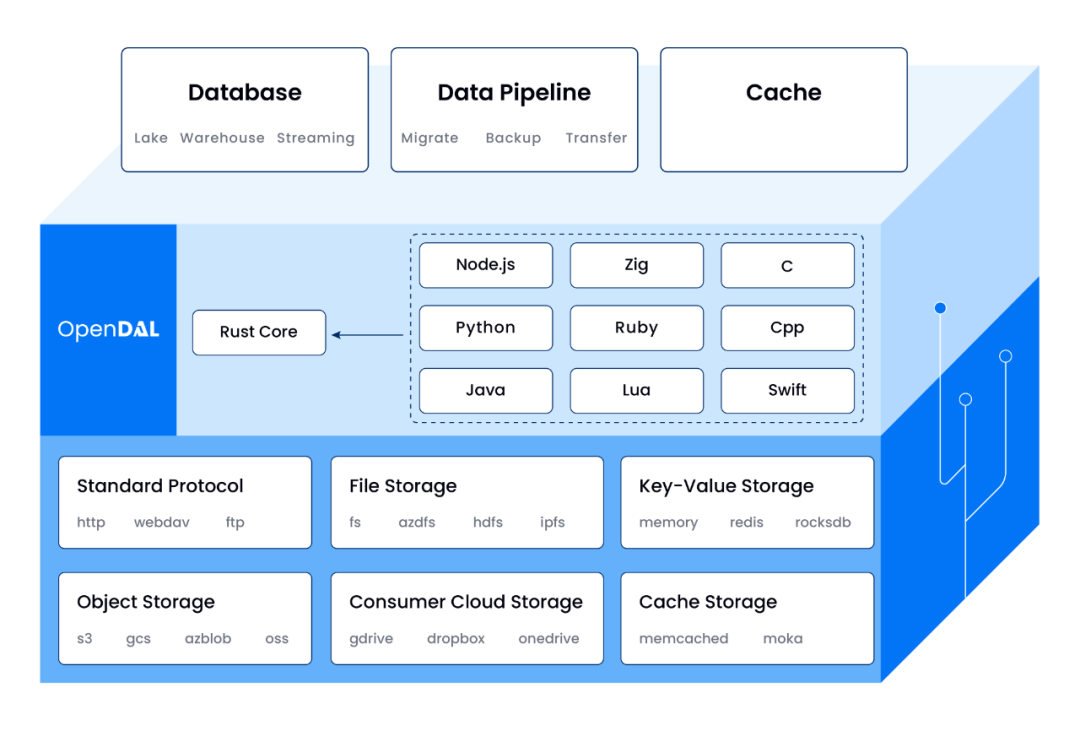
天工开物 #7 Rust 与 Java 程序的异步接口互操作
许多语言的高性能程序库都是建立在 C/C 的核心实现上的。 例如,著名 Python 科学计算库 Pandas 和 Numpy 的核心是 C 实现的,RocksDB 的 Java 接口是对底层 C 接口的封装。 Rust 语言的基本目标之一就是替代 C 在这些领域的位置,为开发者提供…...
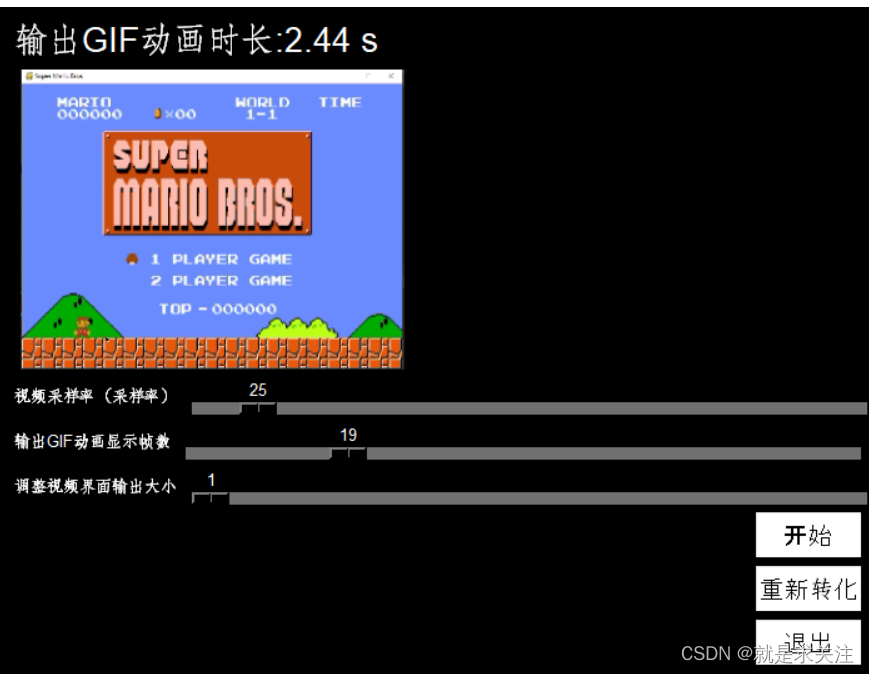
python实现视频转GIF动图(无水印,包含代码详解和.exe执行文件)
该代码提供了一个简单的界面,允许用户将视频转换为GIF动画,并且可以自定义采样率、GIF帧率和输出大小。修改后的代码将视频帧的大小调整为固定的尺寸,并在生成GIF动画时保持这个尺寸。 一、核心代码实现 核心代码如下: import c…...
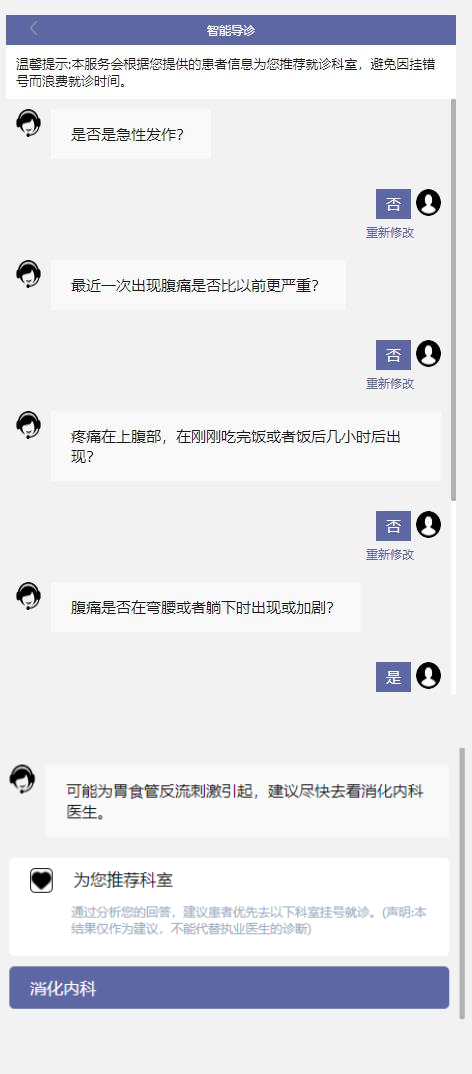
一套AI+医疗模式的医院智慧导诊系统源码:springboot+redis+mybatis plus+mysql
一套AI医疗模式的医院智慧导诊系统源码 相关技术: 技术架构:springbootredismybatis plusmysqlRocketMQ 开发语言:java 开发工具:IDEA 前端框架:Uniapp 后端框架:springboot 数 据 库:mys…...

Android 使用modbus协议与可能遇到的问题解决一览
目录 前言一、导入模块二、协议相关1. CRC162. ByteUtil3. ModbusError4. ModbusErrorType5. ModbusFunction6. ModbusRtuMaster7. ByteArrayWriter8. ModbusRtuSerialPortUtil9. ModbusRtuMasterHelp 三、使用总结 前言 本篇文章主要演示android的串口通讯功能,其…...
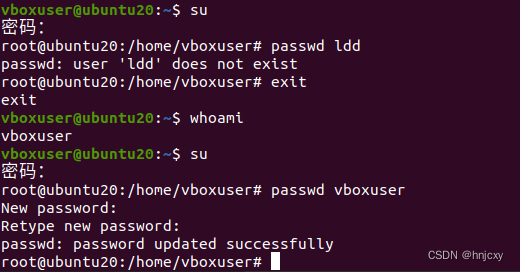
Virtualbox虚拟机中Ubuntu忘记密码
1、首先重新启动Ubuntu系统,鼠标快速点一下Virtualbox虚拟机窗口获取焦点,然后按住shift键,以调出grub启动菜单。 2、根据提示按下键盘E键进入编辑模式,向下移动光标,将如下"ro quiet splash $vt_handoff"部…...
)
isPresent()
isPresent() 是 Optional 类的一个方法,用于检查 Optional 对象中是否存在非空值。 Optional 是 Java 8 引入的一个类,用于解决空指针异常的问题。它可以将一个可能为空的值封装成一个对象,并提供了一系列方法来进行安全的操作。 具体来说&…...

DC.js教程_编程入门自学教程_菜鸟教程-免费教程分享
教程简介 DC.js 是一个优秀的 JavaScript 库,用于在浏览器、移动设备中进行数据分析,最终有助于创建数据可视化;DC.js 是一个用于探索大型多维数据集的图表库,它依靠 D3.js 引擎以 CSS 友好的 SVG 格式呈现图表。它允许呈现复杂的…...
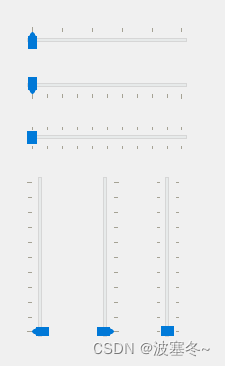
Qt应用开发(基础篇)——滑块类 Slider、ScrollBar、Dial
一、前言 滑块类QScrollBar、QSlider和QDial继承于QAbstractSlider,父类主要拥有最大值、最小值、步长、当前值、滑块坐标等信息,滑动的时候触发包含值数据变化、滑块按下、滑块释放等信号。键盘包括左/上和右/下箭头键通过定义的singleStep改变当前值&a…...

iOS的NSUserActivity
NSUserActivity 是 iOS 平台上的一个类,用于支持应用程序之间的交互和继续活动(Continuity)。它主要用于实现 Handoff 功能,使用户可以在不同的 Apple 设备上无缝地继续进行某个任务。NSUserActivity 还可以用于保存和传递应用程序…...
Android HTTP使用(详细版)
前言 在面试过程中,HTTP 被提问的概率还是比较高的。 小林我搜集了 5 大类 HTTP 面试常问的题目,同时这 5 大类题跟 HTTP 的发展和演变关联性是比较大的,通过问答 + 图解的形式由浅入深的方式帮助大家进一步的学习和理解 HTTP 协议。 HTTP 基本概念 Get 与 Post HTTP 特性…...

【雕爷学编程】MicroPython动手做(25)——语音合成与语音识别
知识点:什么是掌控板? 掌控板是一块普及STEAM创客教育、人工智能教育、机器人编程教育的开源智能硬件。它集成ESP-32高性能双核芯片,支持WiFi和蓝牙双模通信,可作为物联网节点,实现物联网应用。同时掌控板上集成了OLED…...

前端开发:基于cypress的自动化实践
如何在vue中使用cypress如何运行cypress如何编写测试用例如何解决测试数据的问题遇到的元素定位的问题如何看待cypresscypress是否为最佳工具测试怎么办? 如何在vue中使用cypress vue提供了vue-cli 可以快速的创建vue项目。 vue create hello-world在选择安装项里…...

C++类和对象(下部曲)
构造函数 1 构造函数体赋值 在创建对象时,编译器通过调用构造函数,给对象中各个成员变量一个合适的初始值 虽然对象中已经有了一个初始值,但是不能将其称为对对象中成员变量的初始化 构造函数体中的语句只能将其称为赋初值,而…...

解决eclipse 打开报错 An error has occurred. See the log file null.
解决eclipse 打开报错an error has ocurred. See the log file null 出现原因:安装了高版本的jdk,更换 jdk 版本,版本太高了。 解决方案:更改环境变量 改成 jkd 1.8...

跨平台媒体采集方案:智能资源获取工具实战指南
跨平台媒体采集方案:智能资源获取工具实战指南 【免费下载链接】res-downloader 视频号、小程序、抖音、快手、小红书、直播流、m3u8、酷狗、QQ音乐等常见网络资源下载! 项目地址: https://gitcode.com/GitHub_Trending/re/res-downloader 你是否曾经遇到过这…...

Pandoc终极指南:如何用一款工具解决所有文档格式转换难题
Pandoc终极指南:如何用一款工具解决所有文档格式转换难题 【免费下载链接】pandoc Universal markup converter 项目地址: https://gitcode.com/gh_mirrors/pa/pandoc 你是否曾经为不同文档格式之间的转换而烦恼?是否需要在Markdown、Word、PDF、…...

终极指南:如何用Word Checker轻松实现中英文拼写自动纠正
终极指南:如何用Word Checker轻松实现中英文拼写自动纠正 【免费下载链接】word-checker 🇨🇳🇬🇧Chinese and English word spelling corrector.(中文易错别字检测,中文拼写检测纠正。英文单词拼写校验工具…...

VideoDownloadHelper专业视频下载解决方案:技术架构与实战指南
VideoDownloadHelper专业视频下载解决方案:技术架构与实战指南 【免费下载链接】VideoDownloadHelper Chrome Extension to Help Download Video for Some Video Sites. 项目地址: https://gitcode.com/gh_mirrors/vi/VideoDownloadHelper VideoDownloadHelp…...

华硕笔记本性能控制革命:G-Helper轻量级优化工具深度评测与实战指南
华硕笔记本性能控制革命:G-Helper轻量级优化工具深度评测与实战指南 【免费下载链接】g-helper Lightweight Armoury Crate alternative for Asus laptops with nearly the same functionality. Works with ROG Zephyrus, Flow, TUF, Strix, Scar, ProArt, Vivobook…...

免费开源AMD Ryzen调试工具:SMUDebugTool完全指南与实用教程
免费开源AMD Ryzen调试工具:SMUDebugTool完全指南与实用教程 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址: http…...

3分钟学会Switch破解:TegraRcmGUI图形化注入工具完全指南
3分钟学会Switch破解:TegraRcmGUI图形化注入工具完全指南 【免费下载链接】TegraRcmGUI C GUI for TegraRcmSmash (Fuse Gele exploit for Nintendo Switch) 项目地址: https://gitcode.com/gh_mirrors/te/TegraRcmGUI TegraRcmGUI是一款专为Windows平台设计…...

AI落地的七道锯齿:从工业质检看真实工程边界
1. 项目概述:这不是一篇讲魔法的童话,而是一份AI落地现场的工程手记“Magic Wands Don’t Exist: The Jagged Frontier of AI”——这个标题像一记闷棍,打在当下满屏“一键生成”“秒级响应”“智能体自主进化”的宣传泡沫上。我第一次看到它…...

告别杂乱窗口:QTTabBar如何用标签页重塑Windows文件管理体验
告别杂乱窗口:QTTabBar如何用标签页重塑Windows文件管理体验 【免费下载链接】qttabbar QTTabBar is a small tool that allows you to use tab multi label function in Windows Explorer. https://www.yuque.com/indiff/qttabbar 项目地址: https://gitcode.com…...

UE5 Paper2D地形材质系统核心解析:坡度混合与Slope LUT实现
1. 这不是普通材质文件——PaperTerrainMaterial.cpp是UE5中2D地形系统的“神经中枢”你打开UE5的源码目录,翻到Engine/Source/Runtime/Paper2D/Private/Terrain/路径下,一眼就能看到PaperTerrainMaterial.cpp。它不像PaperSprite.cpp那样被教程反复提及…...