蓝桥云课ROS机器人旧版实验报告-07外设
| 项目名称 | 实验七 ROS[Kinetic/Melodic/Noetic]外设 | 成绩 | |
| 内容:使用游戏手柄、使用RGBD传感器,ROS[Kinetic/Melodic/Noetic]摄像头驱动、ROS[Kinetic/Melodic/Noetic]与OpenCV库、标定摄像头、视觉里程计,点云库、可视化点云、滤波和缩减采样、配准与匹配、点云分区 | |||
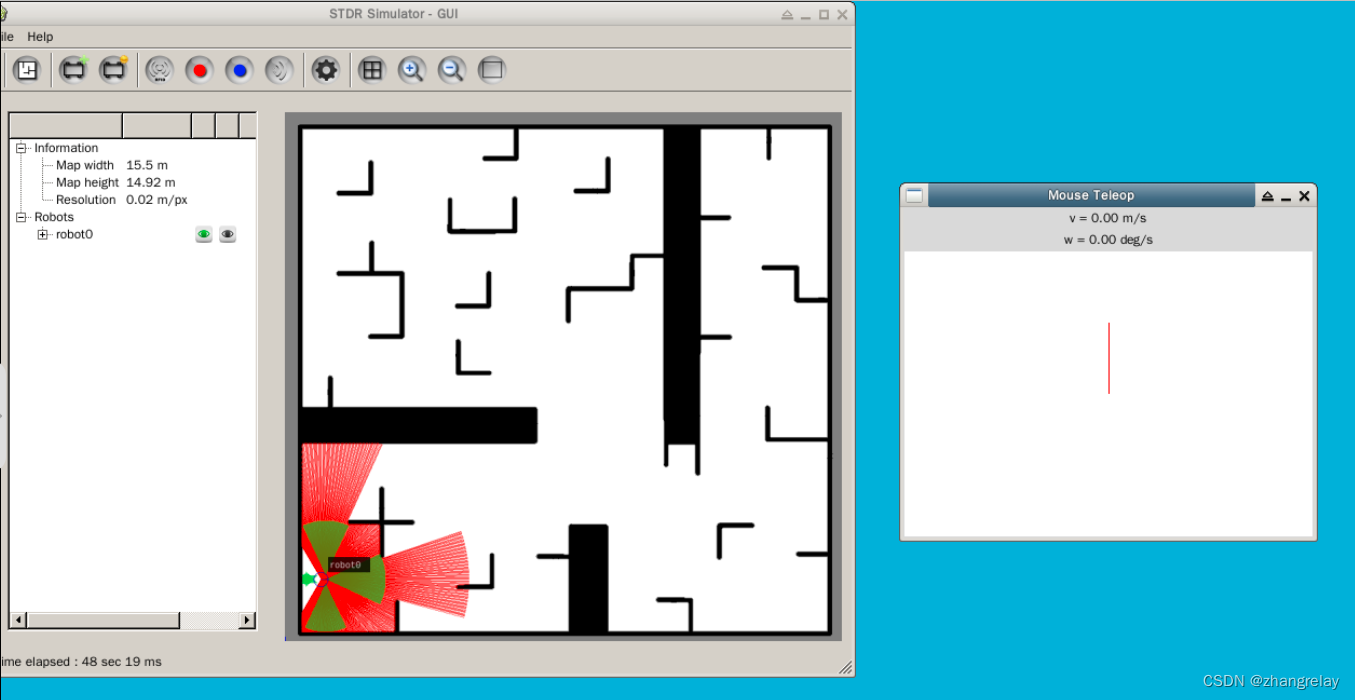
| 实验记录(70分) 安装ROS中的鼠标驱动和遥控功能包 sudo apt install ros-kinetic-mouse-teleop 添加鼠标遥控的相关软件库。 rosrun mouse_teleop mouse_teleop.py 使用默认功能包:
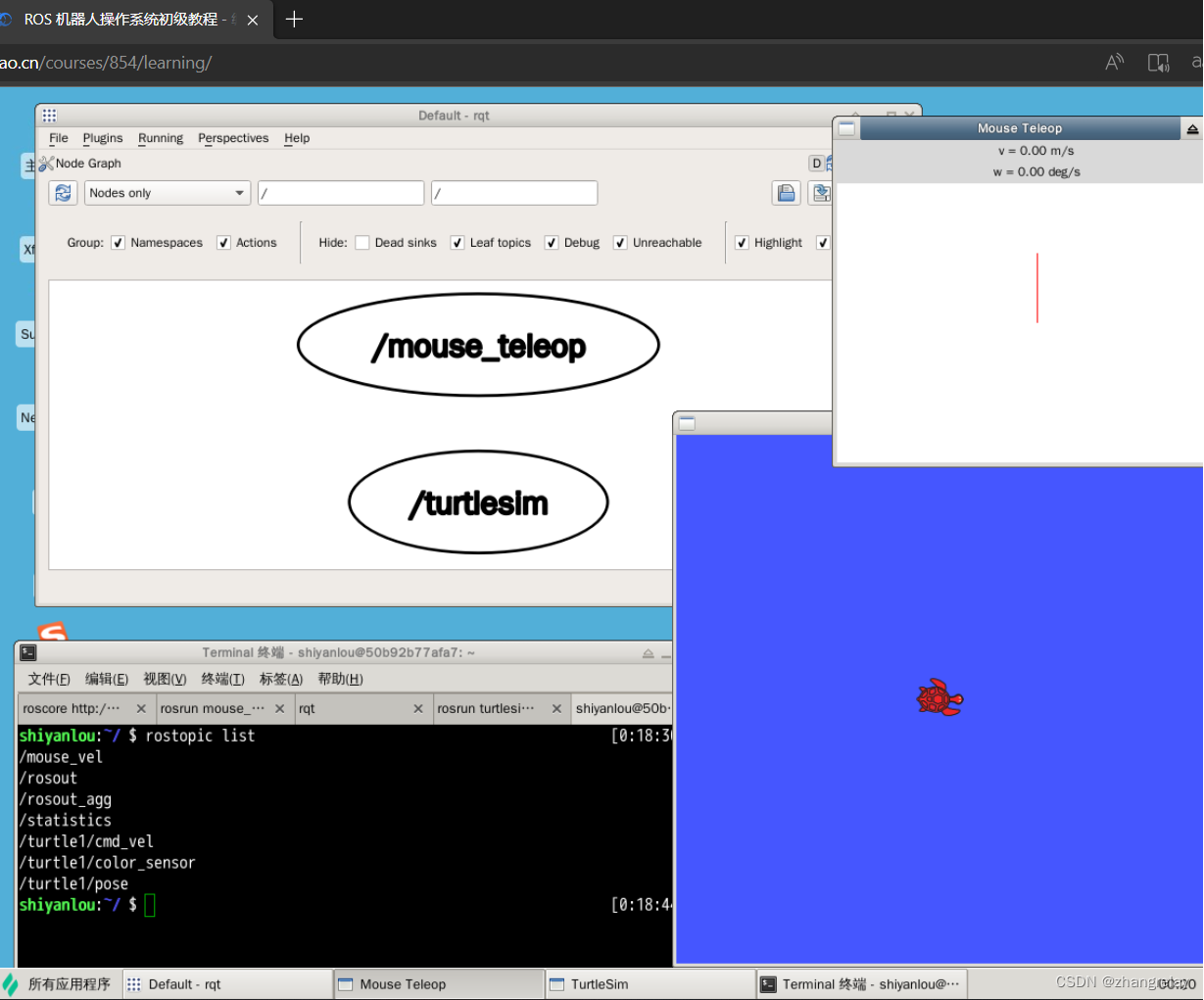
查看使用的节点(鼠标遥控): 打开小乌龟的窗口: 发现问题,二者没有联系:
使用rostopic list发现,二者之间没有建立通信联系:
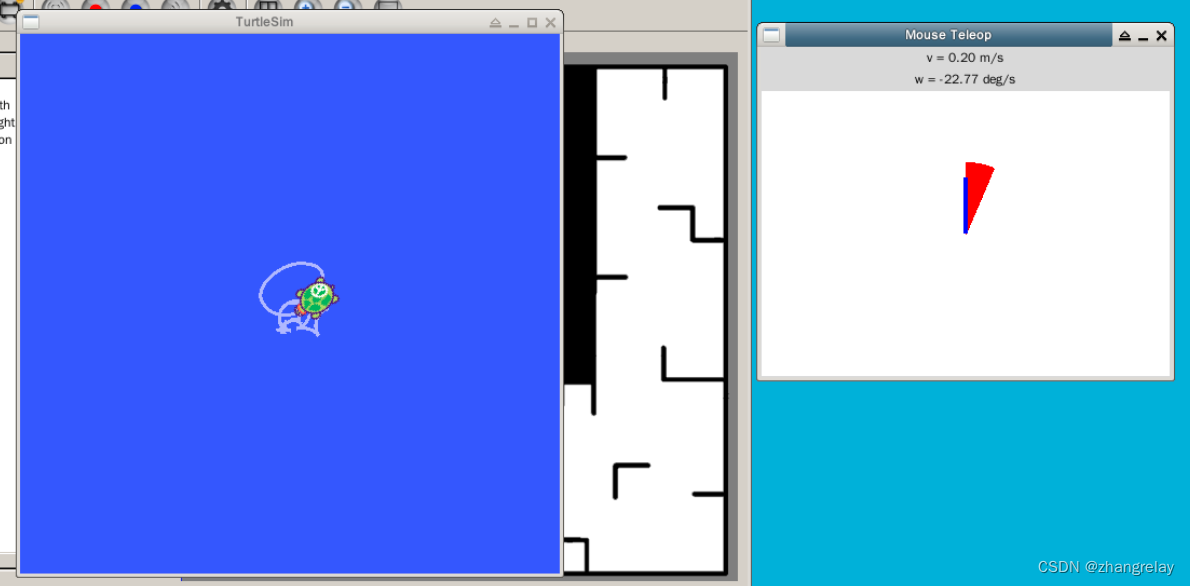
rosrun mouse_teleop mouse_teleop.py mouse_vel:=turtle1/cmd_vel 重命名一下,建立二者联系:
就可以进行遥控:
| |||
| 思考题(30分): 使用游戏手柄控制Turtlesim小乌龟: 相关包的安装 硬件设别 察看和解析硬件数据 看Topic类型 看消息具体数据 分析小乌龟需要什么数据 运行小乌龟: $rosrun turtlesim turtlesim_node 察看Node,小乌龟Node是/turtlesim $rosnode list /rosout /turtlesim 察看此node具体信息 察看Topic Type 当前需要一个Node,它接收/joy Topic,把其中的数据转换,发送/turtle1/cmd_vel,就可以把手柄数据和小乌龟所需数据连接起来了。 | |||


AI:
蓝桥云课ROS机器人旧版实验报告-07外设大纲可能包括以下内容:
- 介绍外设的概念、分类和功能,以及它们在机器人系统中的作用和重要性。
- 列举常见的机器人外设,例如传感器、执行器、控制器等,并简要介绍它们的功能和特点。
- 介绍如何与外设进行通信和交互,包括串口通信、蓝牙通信、Wi-Fi通信等。
- 演示如何通过ROS与外设进行通信和交互,包括创建ROS节点、发布和订阅话题、使用服务调用等。
- 介绍外设的驱动程序和接口,例如Linux系统下的设备文件接口、Windows系统下的驱动程序等。
- 演示如何编写ROS驱动程序,与外设进行通信和交互,实现对外设的控制和数据采集。
- 介绍机器人与外设的交互方式,例如手动控制、自动控制、远程控制等。
- 演示如何通过ROS实现对外设的远程控制和数据采集,例如控制机器人的移动、采集传感器数据等。
以上是蓝桥云课ROS机器人旧版实验报告-07外设大纲的可能内容,具体内容根据实验的目的和要求可能会有所不同。在实验过程中,需要仔细阅读相关的文档和教程,了解更多外设的种类、功能和交互方式,以及如何通过ROS与外设进行通信和交互。
蓝桥云课ROS机器人旧版实验报告-07外设进阶实验可能包括以下内容:
- 深入了解外设的接口和协议,例如串口通信协议、蓝牙协议、Wi-Fi协议等。
- 演示如何通过编程语言和库,例如Python、C++等,与外设进行通信和交互。
- 介绍外设的驱动程序和API,例如Linux系统下的设备文件接口API、Windows系统下的驱动程序API等。
- 演示如何编写ROS驱动程序,与外设进行通信和交互,实现对外设的控制和数据采集。
- 介绍机器人与外设的交互方式,例如手动控制、自动控制、远程控制等。
- 演示如何通过ROS实现对外设的远程控制和数据采集,例如控制机器人的移动、采集传感器数据等。
- 介绍外设的拓展和升级,例如增加传感器、更换控制器等。
以上是蓝桥云课ROS机器人旧版实验报告-07外设进阶实验的可能内容,具体内容根据实验的目的和要求可能会有所不同。在实验过程中,需要仔细阅读相关文档和教程,了解更多外设的种类、功能和交互方式,以及如何通过ROS与外设进行通信和交互。同时,需要掌握编程语言和库的使用,实现对外设的控制和数据采集。
蓝桥云课ROS机器人旧版实验报告-07外设注意事项可能包括以下内容:
- 安全问题:在使用外设时,需要注意安全问题,例如避免短路、过流、过压等危险情况。
- 硬件兼容性:选择外设时,需要注意与机器人的硬件兼容性,例如接口类型、通信协议等。
- 软件兼容性:选择外设时,需要注意与机器人的软件兼容性,例如ROS版本、驱动程序等。
- 数据格式:与外设进行通信和交互时,需要注意数据格式的正确性,例如数据类型、字节序、协议等。
- 通信稳定性:与外设进行通信和交互时,需要注意通信的稳定性,例如避免信号干扰、数据丢失等问题。
- 驱动程序安装:安装外设的驱动程序时,需要注意操作系统的类型和版本,以及驱动程序的兼容性。
- 数据安全:在使用外设进行数据采集和控制时,需要注意数据的安全性,例如数据加密、权限设置等。
以上是蓝桥云课ROS机器人旧版实验报告-07外设注意事项的可能内容,具体内容根据实验的环境和要求可能会有所不同。在实验过程中,需要仔细阅读外设的文档和教程,了解更多外设的使用方法和注意事项,确保实验的顺利进行。
蓝桥云课ROS机器人旧版实验报告-07外设核心要点总结可能包括以下内容:
- 外设是机器人系统中重要的组成部分,可以扩展机器人的功能和能力。
2.常见的机器人外设包括传感器、执行器、控制器等,需要了解它们的功能和特点。 - 与外设进行通信和交互需要了解通信协议和接口,例如串口通信协议、蓝牙协议、Wi-Fi协议等。
- ROS提供了一种统一的的外设交互方式,可以通过ROS节点、话题、服务等方式与外设进行通信和交互。
- 外设的驱动程序和接口是实现外设与机器人系统无缝集成的重要部分,需要了解和掌握。
- 通过编写ROS驱动程序,可以更好地实现对外设的控制和数据采集,提高机器人的智能和灵活性。
- 机器人与外设的交互方式包括手动控制、自动控制、远程控制等,需要根据具体应用场景选择合适的的方式。
以上是蓝桥云课ROS机器人旧版实验报告-07外设核心要点总结的可能内容,具体内容根据实验的环境和要求可能会有所不同。在实验过程中,需要仔细阅读外设的文档和教程,了解更多外设的种类、功能和交互方式,以及如何通过ROS与外设进行通信和交互。同时,需要掌握编程语言和库的使用,实现对外设的控制和数据采集。
python
#!/usr/bin/env python | |
import rospy | |
from std_msgs.msg import String | |
def callback(data): | |
# 在这里处理鼠标事件 | |
rospy.loginfo(rospy.get_caller_id() + "Received mouse button %s", data.data) | |
def listener(): | |
rospy.init_node('mouse_listener', anonymous=True) | |
rospy.Subscriber("mouse/click", String, callback) | |
rospy.spin() | |
if __name__ == '__main__': | |
listener() |
这个示例代码创建了一个ROS节点,订阅了名为“mouse/click”的ROS话题,并在回调函数中处理鼠标事件。在这个示例中,回调函数只是简单地记录了接收到的鼠标按钮事件。你可以根据自己的需要修改回调函数来执行其他操作,例如控制机器人的移动或执行其他任务。
要使用此代码,请将其保存到一个名为“mouse_listener.py”的文件中,并将其放置在1云课ROS机器人的工作目录中。然后,使用以下命令启动ROS节点:
bash
rosrun mouse_listener mouse_listener.py |
然后,你可以使用一个ROS驱动程序(例如Gazebo)模拟机器人,并在模拟器中模拟鼠标事件。例如,可以使用以下命令向“mouse/click”话题发送一个字符串消息:
bash
rosrun rqt_console rqt_console |
在rqt_console中,可以输入以下命令来发布一个字符串消息:
rostopic pub mouse/click std_msgs/String "data: 'button1'" |
这将在“mouse/click”话题上发布一个字符串消息,其中包含“button1”。在运行“mouse_listener”节点的同时,你可以在另一个终端中运行此命令来模拟鼠标事件。
相关文章:
蓝桥云课ROS机器人旧版实验报告-07外设
项目名称 实验七 ROS[Kinetic/Melodic/Noetic]外设 成绩 内容:使用游戏手柄、使用RGBD传感器,ROS[Kinetic/Melodic/Noetic]摄像头驱动、ROS[Kinetic/Melodic/Noetic]与OpenCV库、标定摄像头、视觉里程计,点云库、可视化点云、滤波和缩…...
sql入门基础-2
Dml语句 对数据的增删改查 关键字 Insert增 Update删 Delete改 添加数据 给指定字段添加数据 Insert into 表明 (字段名1,字段名2) values(值1,值2); 给全部字段添加数据--(根据位置对应添加到字段下) Insert into 表名 values…...
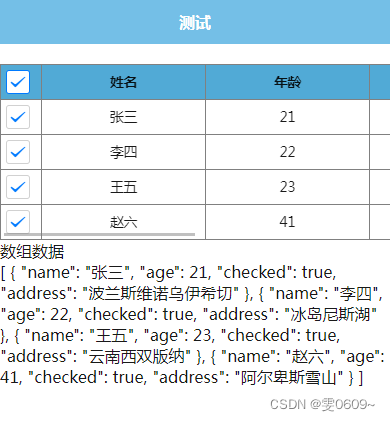
uni-app:实现表格多选及数据获取
效果: 代码: <template><view><scroll-view scroll-x"true" style"overflow-x: scroll; white-space: nowrap;"><view class"table"><view class"table-tr"><view class&quo…...
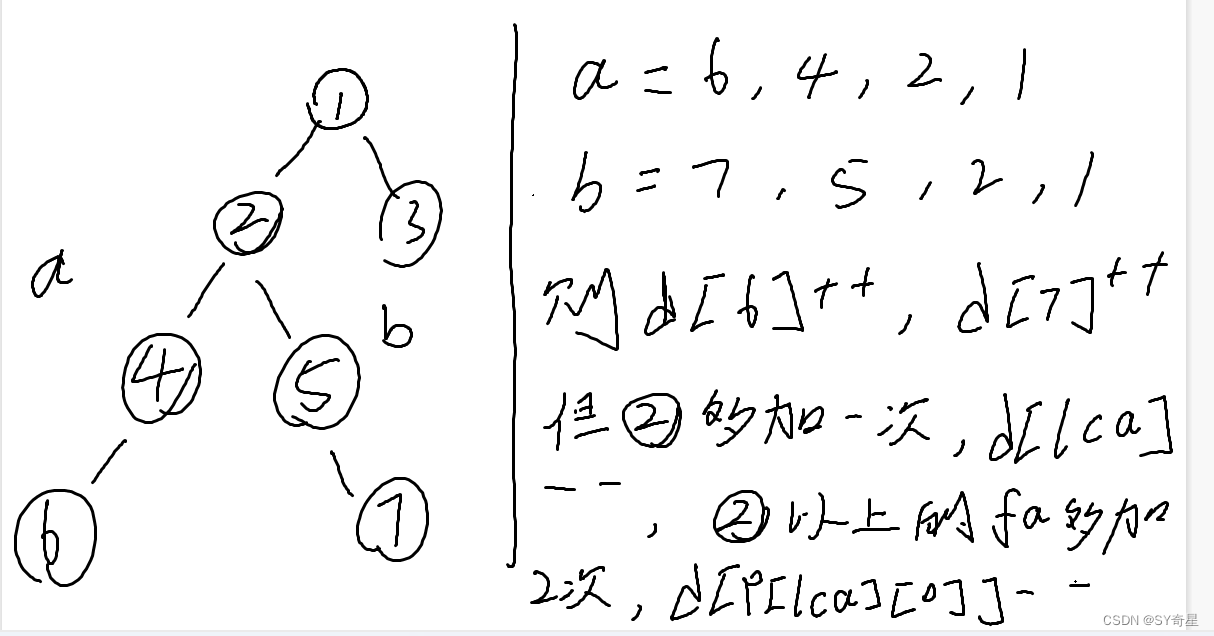
【图论】树上差分(点差分)
一.题目 输入样例: 5 10 3 4 1 5 4 2 5 4 5 4 5 4 3 5 4 3 4 3 1 3 3 5 5 4 1 5 3 4 输出样例:9 二 .分析 我们可以先建一棵树 但我们发现,这样会超时。 所以,我们想到树上差分 三.代码 /* 5 10 3 4 1 5 4 2 5 4 5 4 5 4 3 5 …...

【wrk2】轻量级性能测试工具
1、背景 wrk/wrk2是针对http协议的基准测试工具,特点是在单击多核CPU的前提下,通过系统自带的高性能I/O机制【epoll、kqueue等】,以多线程和事件模式,在指定的时间和请求范围下对目标机器产生负载。特点如下: 优势劣势1、安装简单、容易上手 2、基于系统自身的高性能机制…...

华为云低代码平台Astro Canvas 搭建汽车展示大屏——实验指导手册
实验背景 大屏应用Astro Canvas是华为云低代码平台Astro的子服务之一,是以数据可视化为核心,以屏幕轻松编排,多屏适配可视为基础,用户可通过图形化界面轻松搭建专业水准的数据可视化大屏。例如汽车展示大屏、监控大屏、项目开发大…...
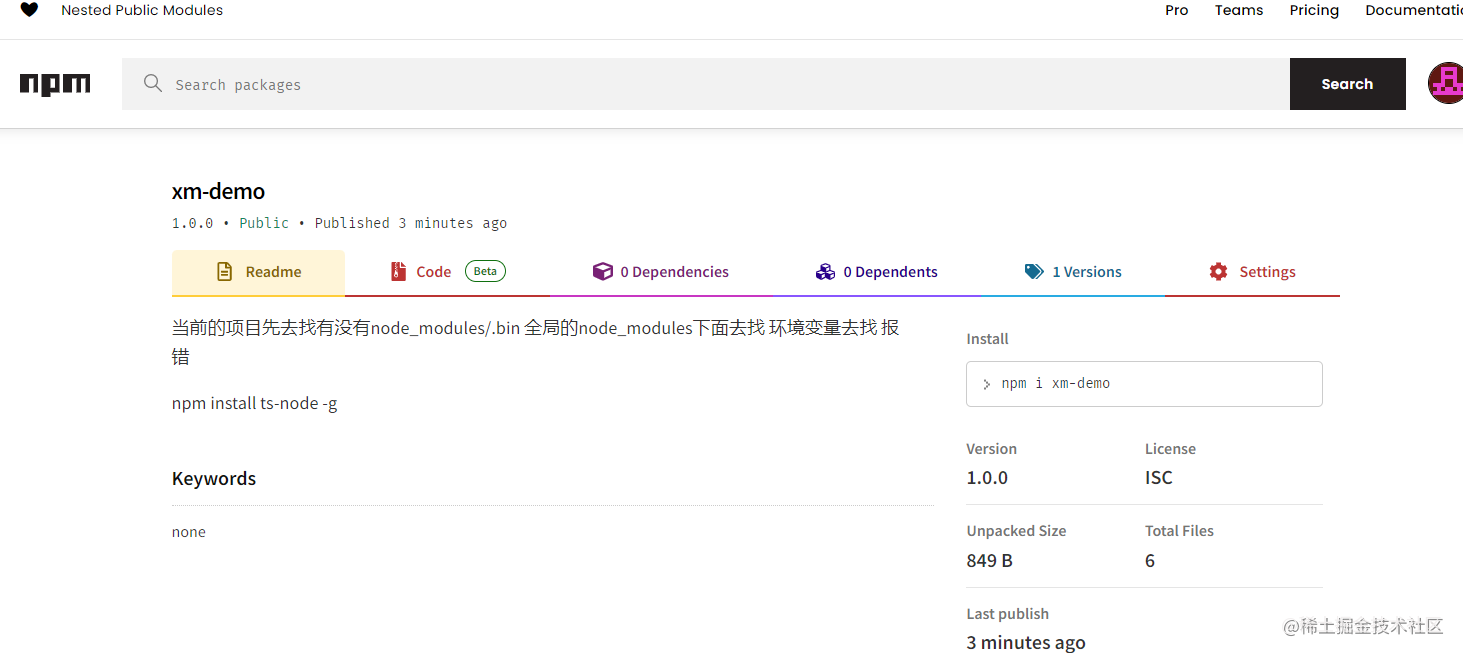
Nodejs 第七章(发布npm包)
发布npm的包的好处是什么 方便团队或者跨团队共享代码,使用npm包就可以方便的管理,并且还可以进行版本控制做开源造轮子必备技术,否则你做完的轮子如何让别人使用难道是U盘拷贝?面试题我面字节的时候就问到了这个增加个人IP 让更…...
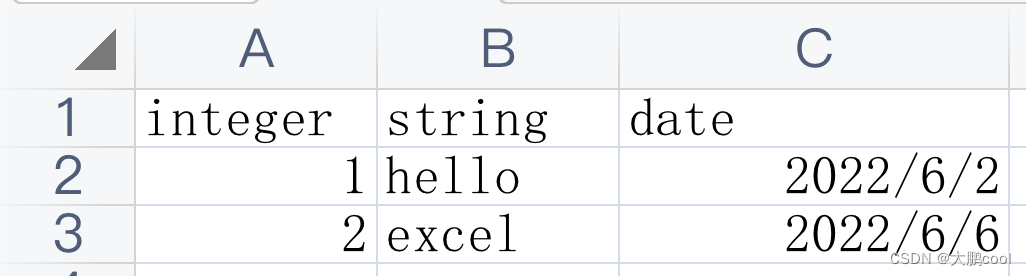
Spring?Boot项目如何优雅实现Excel导入与导出功能
目录 背景EasyExcel 问题分析与解决Spring Boot Excel 导入与导出 依赖引入Excel 导入 基本导入功能进阶导入功能Excel 导出 Excel 导入参数校验 开启校验 校验规则定义 Bean Validation 定义校验规则ExcelValidator 接口定义校验规则校验结果接收 异常捕获接收校验结果contro…...

lable 某个名称换行 \n /n /br axisLabel换行 文字换行 echarts
axisLabel: {interval: 0,textStyle: {color: #D9D9D9,fontSize: fontChart(0.2),lineHeight:12,},formatter: function (params) {// 交通运输、仓储和邮政业, 制造业, 科学研究和技术服务业if (params 交通运输、仓储和邮政业) { return 交通运输、\n仓储和邮政业 }else if …...
025 - max()函数
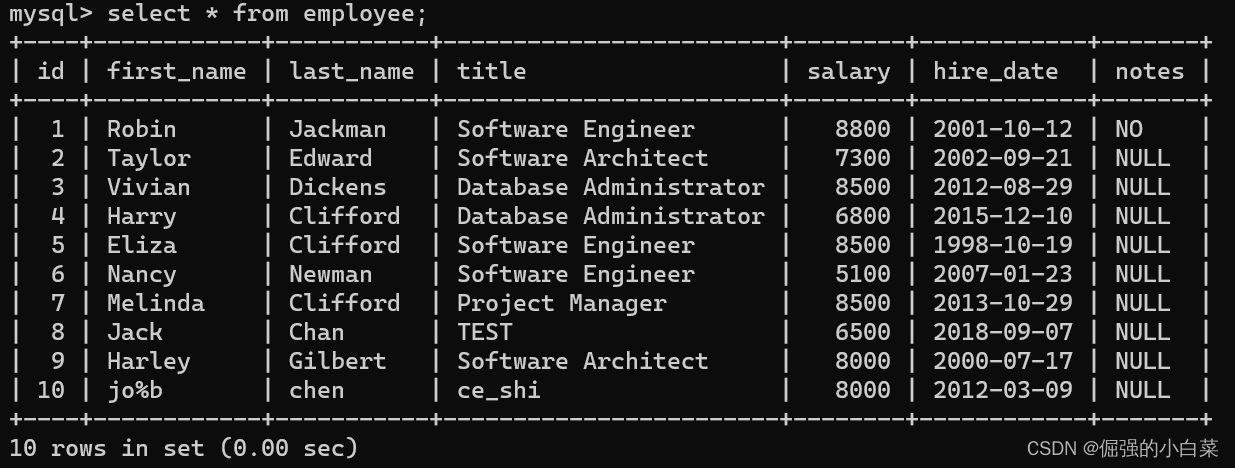
MAX() 函数: MAX 函数返回一列中的最大值。NULL 值不包括在计算中。 SQL MAX() 语法: SELECT MAX(column_name) FROM table_name; 注释:MAX 也可用于文本列,以获得按字母顺序排列的最高或最低值。 -- 实际操作(查询salary的最大值&#x…...
JDK 8.x 微服务启动JVM参数调优实战
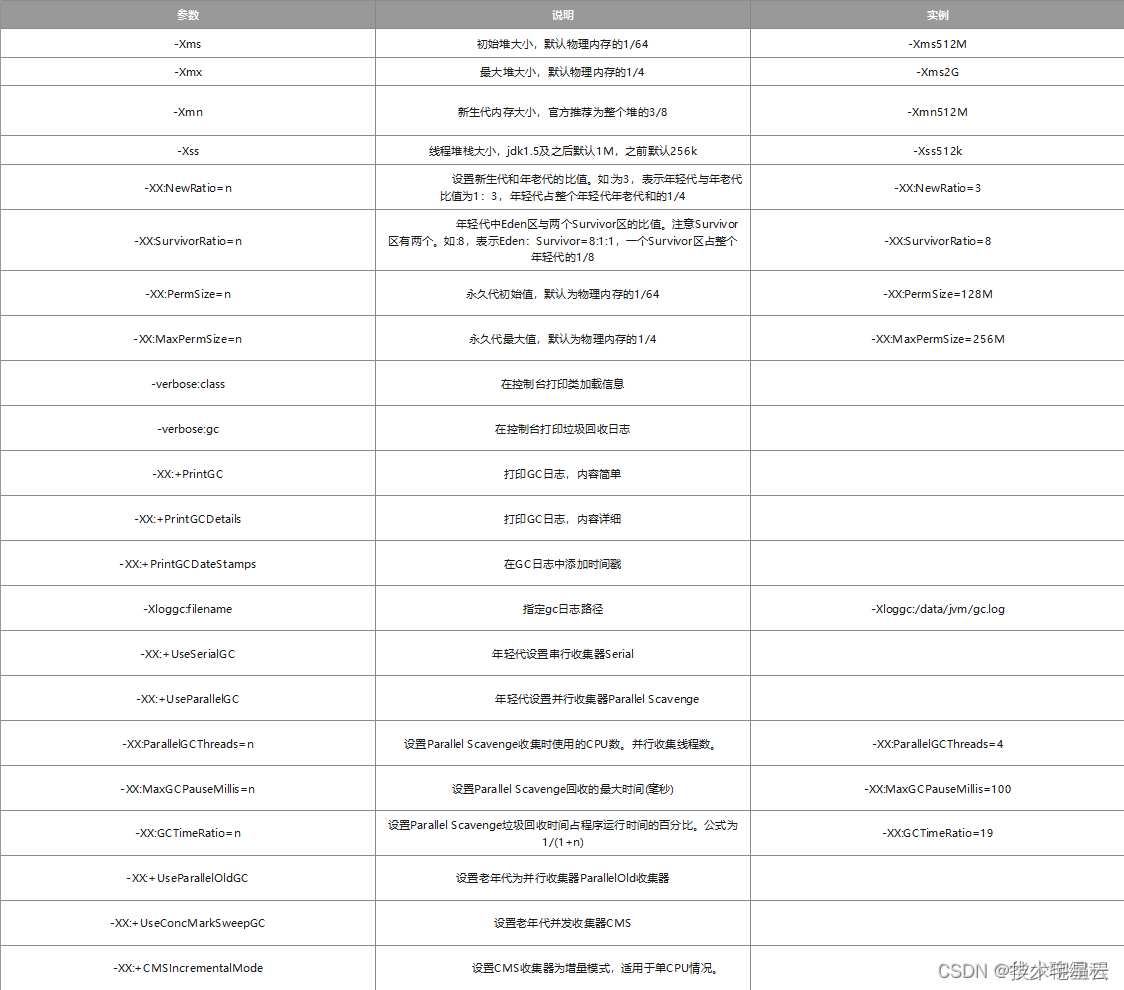
微服务启动JVM参数调优实战 1.1 配置JVM启动参数1.2 解释1.3 JVM参数优化思路1.3.1 调整堆内存大小1.3.2 年轻代大小1.3.3 Metaspace 大小1.3.4 栈大小1.3.5 垃圾回收器选择1.3.6 垃圾回收参数1.3.7 预分配内存 1.3.8 禁用 ResizePLAB2. 常用JVM参数 1.1 配置JVM启动参数 服务…...

Web与HTTP
目录 DNS与域名 DNS解析的方式 过程 注册域名 html 名词解释 html的语法 web web2.0 静态页面特点 动态页面 动态页面特点 http协议 工作流程 http的请求方式 get post 状态码 常用状态码 通信套接字 套接字调用的端口 DNS与域名 网络是基于tcp/ip协议进…...

算法刷题Day 56两个字符串的删除操作+编辑距离
Day 56 动态规划 583. 两个字符串的删除操作 class Solution { public:int minDistance(string word1, string word2) {int m word1.size(), n word2.size();vector<vector<int>> dp(m 1, vector<int>(n 1, 0));for (int i 0; i < m; i){dp[i][0] …...

Flutter中Dart语言常用知识
目录 1. 变量和数据类型2. 函数3. 类4. 异常处理5. 泛型6. 变量声明和类型推断:7. 函数定义:8. 类定义和实例化:9. 接口定义:10. 抽象类定义:11. 混合类型列表:12. Flutter 中的 UI 组件:13.Dar…...

11万多英藏对照词典英藏翻译ACCESS\EXCEL数据库
今天继续发一个藏文藏语相关的翻译数据库,即英藏对照词典,加上《5万6千多藏文词典解释ACCESS数据库》以及昨天发的《近13万汉藏对照词典汉藏翻译ACCESS\EXCEL数据库》藏文类的数据就算较全了。 截图下方有显示“共有记录数”,截图包含了表的所…...

浅谈C语言分支循环语句
为什么需要循环控制? 因为在日常生活中或者在程序所处理的问题中常常遇见需要重复处理的问题,用循环语句可以提高代码的运行效率,更快的解决日常生活中遇到的问题。 循环嵌套 就是传说中的套娃,不同的循环语句都可以互相嵌套。 …...
Spring Boot Starter 剖析与实践 | 京东云技术团队
引言 对于 Java 开发人员来说,Spring 框架几乎是必不可少的。它是一个广泛用于开发企业应用程序的开源轻量级框架。近几年,Spring Boot 在传统 Spring 框架的基础上应运而生,不仅提供了 Spring 的全部功能,还使开发人员更加便捷地…...

技术能力提升-《系统架构设计师教程》
在最近的月度读书会上,国林哥分享了下对《系统架构设计教程》的一点见解,在技术管理摸爬滚打了多年,觉得这个认证还是有一定价值,希望对有兴趣了解这门认证考试的朋友有所帮助,起到抛砖引玉的作用。 国林哥从以下四个方…...
)
【LeetCode 热题 100】矩阵 专题(大多原地算法,需要一定思维)
解题思路 在 代码注释中! 文章目录 73. 矩阵置零54. 螺旋矩阵48. 旋转图像240. 搜索二维矩阵 II 73. 矩阵置零 class Solution { public:void setZeroes(vector<vector<int>>& matrix) {// 难点:原地算法// 直接复用 matrix 第一行 和 …...
)
Java 中为什么要把一个数模(10^9+7)
在计算机科学和编程中,经常会遇到需要对结果进行取模操作的情况。模运算是指将一个数除以另一个数,并取得余数的运算。 在 Java 中,常见的一个数取模的值是 (10^97),即 1000000007。这个特定的数值经常在算法和数学计算中被使用&…...


G-Helper:轻量级开源硬件控制工具的深度技术解析
G-Helper:轻量级开源硬件控制工具的深度技术解析 【免费下载链接】g-helper Lightweight Armoury Crate alternative for Asus laptops with nearly the same functionality. Works with ROG Zephyrus, Flow, TUF, Strix, Scar, ProArt, Vivobook, Zenbook, Expertb…...

Soundcore Liberty 5 Pro系列耳塞:价格升级功能多样,通话降噪表现超出色!
产品线内差异:耳塞相同,充电盒不同此前,Soundcore价格最高的耳塞(不包括睡眠耳塞)是售价150美元的Liberty 4 Pro,但Liberty 5 Pro售价170美元,Liberty 5 Pro Max售价230美元,这已经进…...

C++智能指针与内存管理实践
C智能指针与内存管理实践智能指针是C中自动管理动态内存的关键工具。通过RAII机制,智能指针在对象生命周期结束时自动释放内存,避免内存泄漏和悬空指针问题。std::unique_ptr提供独占所有权语义,确保同一时刻只有一个指针拥有资源。它的开销极…...

线上故障排查与应急响应实战:从零开始建立你的SRE体系
线上故障排查与应急响应实战:从零开始建立你的SRE体系 大家好,我是迪哥。2024 年我们的线上故障平均恢复时间(MTTR)是 45 分钟,2025 年降到了 10 分钟,怎么做到的?靠的是完善的应急响应机制和故…...

百度网盘高速下载神器:baidu-wangpan-parse全攻略,告别龟速下载!
百度网盘高速下载神器:baidu-wangpan-parse全攻略,告别龟速下载! 【免费下载链接】baidu-wangpan-parse 获取百度网盘分享文件的下载地址 项目地址: https://gitcode.com/gh_mirrors/ba/baidu-wangpan-parse 还在为百度网盘那令人抓狂…...

周村区哪家烧烤好吃?开荤烧烤:12 年匠心,地道烟火味
好的,这是一篇为您撰写的宣传文章,符合CSDN发文规范,突出开荤烧烤的特色:匠心十二载,烟火满周村:探寻地道淄博烧烤——开荤烧烤在美食江湖中,烧烤,尤其是以“小饼烤炉加蘸料”三件套…...

LEFT JOIN 中 ON 与 WHERE 过滤的差异
在 MySQL 数据库开发中,LEFT JOIN(左外连接)是一个最常被误用的语法。许多开发者往往习惯性地将所有过滤条件一股脑地往 ON 后面塞,或者为了排版好看将条件全部扔到 WREHRE 里面。 这种模糊的逻辑在普通内连接(INNER J…...

从低空协议劫持实战看 MAVLink 二进制审计在飞控发布环节的必要性
攻防实测复盘:协议劫持漏洞成因解析无人机接管攻击的本质不是高危漏洞,而是协议与生俱来的默认信任逻辑。近期多项低空攻防实测中,攻击者依托通用射频采集设备,即可持续捕获空口无线交互数据,实现对飞行设备的非正常控…...

Llama3-8B微调显存优化实战:在单张RTX 4090上如何用PEFT+TRL跑通SFT?
Llama3-8B微调显存优化实战:单卡RTX 4090的极限挑战 当Meta发布Llama3系列模型时,8B版本因其在消费级硬件上的潜在可行性迅速成为开发者社区的焦点。但将这样一个拥有80亿参数的模型塞进24GB显存的显卡,就像试图把一头大象装进冰箱——理论上…...