【IMX6ULL驱动开发学习】21.Linux驱动之PWM子系统(以SG90舵机为例)
1.设备树部分
首先在 imx6ull.dtsi 文件中已经帮我们定义好了一些pwm的设备树节点,这里以pwm2为例
pwm2: pwm@02084000 {compatible = "fsl,imx6ul-pwm", "fsl,imx27-pwm";reg = <0x02084000 0x4000>;interrupts = <GIC_SPI 84 IRQ_TYPE_LEVEL_HIGH>;clocks = <&clks IMX6UL_CLK_DUMMY>,<&clks IMX6UL_CLK_DUMMY>;clock-names = "ipg", "per";#pwm-cells = <2>;
};
我们要在设备树(.dts)文件中引用和使能该节点,同时指定好pwm映射到的GPIO引脚(即pinctrl子系统,我这里映射到了GPIO1_9上)
&iomuxc {pinctrl-names = "default";pinctrl-0 = <&pinctrl_hog_1>;imx6ul-evk {............/* SG90 PWM2 GPIO1_IO09 */pinctrl_pwm2: pwm2grp {fsl,pins = <MX6UL_PAD_GPIO1_IO09__PWM2_OUT 0x110b0>;};............
}......
......&pwm2 {pinctrl-names = "default";pinctrl-0 = <&pinctrl_pwm2>;clocks = <&clks IMX6UL_CLK_PWM2>,<&clks IMX6UL_CLK_PWM2>;status = "okay";
};
使用pwm 只需要在设备树节点中添加两条属性信息,如下所示
pwms = <“&PWMn id period_ns>;
pwm-names = "name";
-
pwms :属性是必须的,它共有三个属性值
-
&PWMn 指定使用哪个pwm,在imx6ull.dtsi文件中定义,总共有8个可选;
-
id :pwm的id通常设置为0。
-
period_ns :用于设置周期。单位是ns。
-
pwm-names :定义pwm设备名字。(可以不设置)
最后在根节点下添加自己定义的节点
hc_sg90 {compatible = "hc-sg90";pwms = <&pwm2 0 20000000>; /* 使用pwm1 id为0 周期为20000000ns = 20ms */status = "okay";
};
2.驱动代码部分
老一套的字符设备驱动框架:
- 驱动入口出口
- 驱动入口定义注册字符设备、创建字符设备节点、注册platform设备;
- 驱动出口反注册platfrom设备、删除字符设备节点、反注册字符设备
- 构建file_operations结构体
- 构建platform_device结构体,编写probe函数
如下代码所示:
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/platform_device.h>
#include <linux/of.h>
#include <linux/gpio.h>
#include <linux/uaccess.h>
#include <linux/string.h>
#include <linux/interrupt.h>
#include <linux/irqreturn.h>
#include <linux/of_gpio.h>
#include <linux/slab.h>
#include <linux/device.h>
#include <linux/fs.h>
#include <linux/kernel.h>
#include <linux/wait.h>
#include <linux/sched.h>
#include <linux/timer.h>
#include <linux/gpio/consumer.h>
#include <linux/delay.h>
#include <linux/timekeeping.h>
#include <linux/wait.h>
#include <linux/irqflags.h>
#include <linux/pwm.h>static int major;
static struct class *class;static struct pwm_device *pwm_test;static int sg90_probe(struct platform_device *pdev)
{struct device_node *node = pdev->dev.of_node;printk("sg90 match success \n");if (node){/* 从子节点中获取PWM设备 */pwm_test = devm_of_pwm_get(&pdev->dev, node, NULL); if (IS_ERR(pwm_test)){printk(KERN_ERR" pwm_test,get pwm error!!\n");return -1;}}else{printk(KERN_ERR" pwm_test of_get_next_child error!!\n");return -1;}pwm_config(pwm_test, 1500000, 20000000); /* 配置PWM:1.5ms,90度,周期:20000000ns = 20ms */pwm_set_polarity(pwm_test, PWM_POLARITY_NORMAL); /* 设置输出极性:占空比为高电平 */pwm_enable(pwm_test); /* 使能PWM输出 */return 0;
}static int sg90_remove(struct platform_device *dev)
{pwm_config(pwm_test, 500000, 20000000); /* 配置PWM:0.5ms,0度 */pwm_free(pwm_test);return 0;
}static const struct of_device_id sg90_of_match[] = {{ .compatible = "hc-sg90" },{ }
};static struct platform_driver sg90_platform_driver = {.driver = {.name = "my_sg90",.of_match_table = sg90_of_match,},.probe = sg90_probe,.remove = sg90_remove,
};static int sg90_open (struct inode *node, struct file *filp)
{return 0;
}static ssize_t sg90_write (struct file *filp, const char __user *buf, size_t size, loff_t *offset)
{int res;unsigned char data[1];if(size != 1)return 1;res = copy_from_user(data, buf, size);/* 配置PWM:旋转任意角度(单位1度) */pwm_config(pwm_test, 500000 + data[0] * 100000 / 9, 20000000); return 1;
}static int sg90_release (struct inode *node, struct file *filp)
{return 0;
}static struct file_operations sg90_ops = {.owner = THIS_MODULE,.open = sg90_open,.write = sg90_write,.release = sg90_release,
};static int sg90_init(void)
{major = register_chrdev(0 , "sg90", &sg90_ops);class = class_create(THIS_MODULE, "sg90_class");device_create(class, NULL, MKDEV(major, 0), NULL, "sg90");platform_driver_register(&sg90_platform_driver);return 0;
}static void sg90_exit(void)
{platform_driver_unregister(&sg90_platform_driver);device_destroy(class, MKDEV(major, 0));class_destroy(class);unregister_chrdev(major, "sg90");
}module_init(sg90_init);
module_exit(sg90_exit);
MODULE_LICENSE("GPL");
-
首先 struct device_node *node = pdev->dev.of_node; 获取子节点,在设备树插件中,我们把PWM相关信息保存在 hc_sg90 的子节点中, 所以这里首先获取子节点。
-
在子节点获取成功后我们使用 devm_of_pwm_get 函数获取pwm, 由于节点内只有一个PWM 这里将最后一个参数直接设置为NULL,这样它将获取第一个PWM。
-
依次调用 pwm_config、pwm_set_polarity、pwm_enable 函数配置**PWM、设置输出极性、 使能PWM输出,**需要注意的是这里设置的极性为正常极性, 这样pwm_config函数第二个参数设置的就是pwm波的一个周期内的高电平事件。
其中write函数中关于SG90的占空比计算就不多说了,根据如下图来计算吧

不难得出高电平时间每多出1ms(1000000ns) 对应角度多出9度的结论
则旋转到角度 1 度时,对应的高电平时间为 (500000 + 1000000)/9 ns(因为0度对应的高电平时间为0.5ms = 500000ns)
则旋转到角度 n 度时,高电平时间为 (500000 + n * 1000000)/9 ns
3.应用程序部分
运行示例: ./sg90_test 90 , 即转到90度的位置
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdlib.h>int main(int argc, char *argv[])
{int fd;int res;unsigned char buf[1];fd = open("/dev/sg90", O_WRONLY);if(fd < 0){printf("sg90 open failed\n");return 0;}buf[0] = atoi(argv[1]);write(fd, buf, 1);close(fd);return 0;
}
相关文章:
【IMX6ULL驱动开发学习】21.Linux驱动之PWM子系统(以SG90舵机为例)
1.设备树部分 首先在 imx6ull.dtsi 文件中已经帮我们定义好了一些pwm的设备树节点,这里以pwm2为例 pwm2: pwm02084000 {compatible "fsl,imx6ul-pwm", "fsl,imx27-pwm";reg <0x02084000 0x4000>;interrupts <GIC_SPI 84 IRQ_TYP…...

el-cascader级联选择器加载远程数据、默认开始加载固定条、可以根据搜索加载远程数据。
加载用户列表分页请求、默认请求20条数据。想添加远程搜索用户功能。原有的方法filter-method不能监听到输入清空数据的时候。这样搜索完无法返回默认的20条数据。直接监听级联选择的v-model绑定的值是无法检测到用户自己输入的。 解决思路: el-cascader 没有提供…...

大数据技术之Clickhouse---入门篇---SQL操作、副本
星光下的赶路人star的个人主页 积一勺以成江河,累微尘以崇峻极 文章目录 1、SQL操作1.1 Insert1.2 Update 和 Delete1.3 查询操作1.4 alter操作1.5 导出数据 2、副本2.1 副本写入流程2.2 配置步骤 1、SQL操作 基本上来说传统关系型数据库(以 MySQL 为例…...

【Rust 基础篇】Rust Sized Trait:理解Sized Trait与动态大小类型
导言 Rust是一门以安全性和性能著称的系统级编程语言。在Rust中,类型大小的确定在编译期是非常重要的。然而,有些类型的大小在编译期是无法确定的,这就涉及到了Rust中的动态大小类型(DST)。为了保证在编译期可以确定类…...
)
前端框架学习-Vue(三)
目录 初识VueVue模板语法数据绑定el和data的两种写法事件的基本使用$emit在子组件中定义方法,执行父组件的方法 Vue中的事件修饰符:键盘事件计算属性监视属性条件渲染列表渲染表单数据收集过滤器 笔记内容来自:尚硅谷Vue2.0Vue3.0全套教程丨v…...

HTML <rt> 标签
实例 一个 ruby 注释: <ruby> 漢 <rt> ㄏㄢˋ </rt> </ruby>浏览器支持 元素ChromeIEFirefoxSafariOpera<rt>5.05.538.05.015.0 Internet Explorer 9, Firefox, Opera, Chrome 以及 Safari 支持 <rt> 标签。 注释…...
VMware Linux Centos 配置网络并设置为静态ip
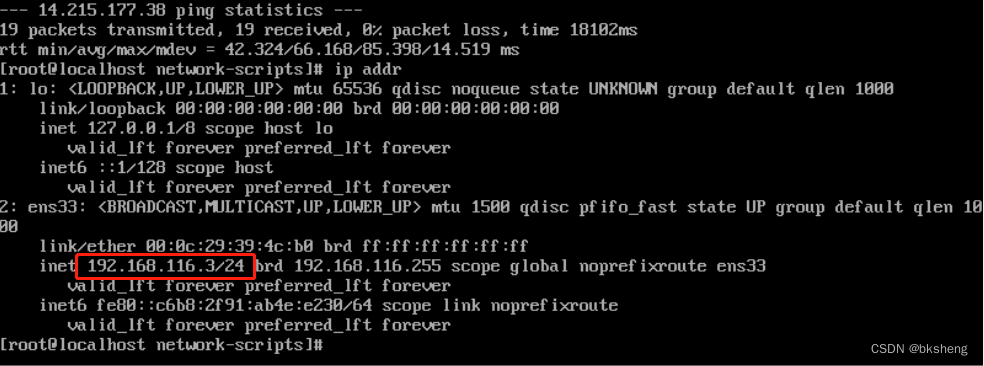
在root用户下进行以下操作 1. 查看子网ip和网关 (1)进入虚拟网络编辑器 (2)进入NAT设置 (3)记录子网IP和子网掩码 2. 修改网络配置文件 (1)cd到网络配置文件路径下 [rootlo…...

【Leetcode 30天Pandas挑战】学习记录
这个系列难度比较低,一题写一篇其实没必要,就全部放到一篇吧 题目列表: 595. Big Countries1757. Recyclable and Low Fat Products 595. Big Countries 原题链接:595. Big Countries Table: World ---------------------- | C…...
微信小程序使用 canvas 2d 实现签字板组件
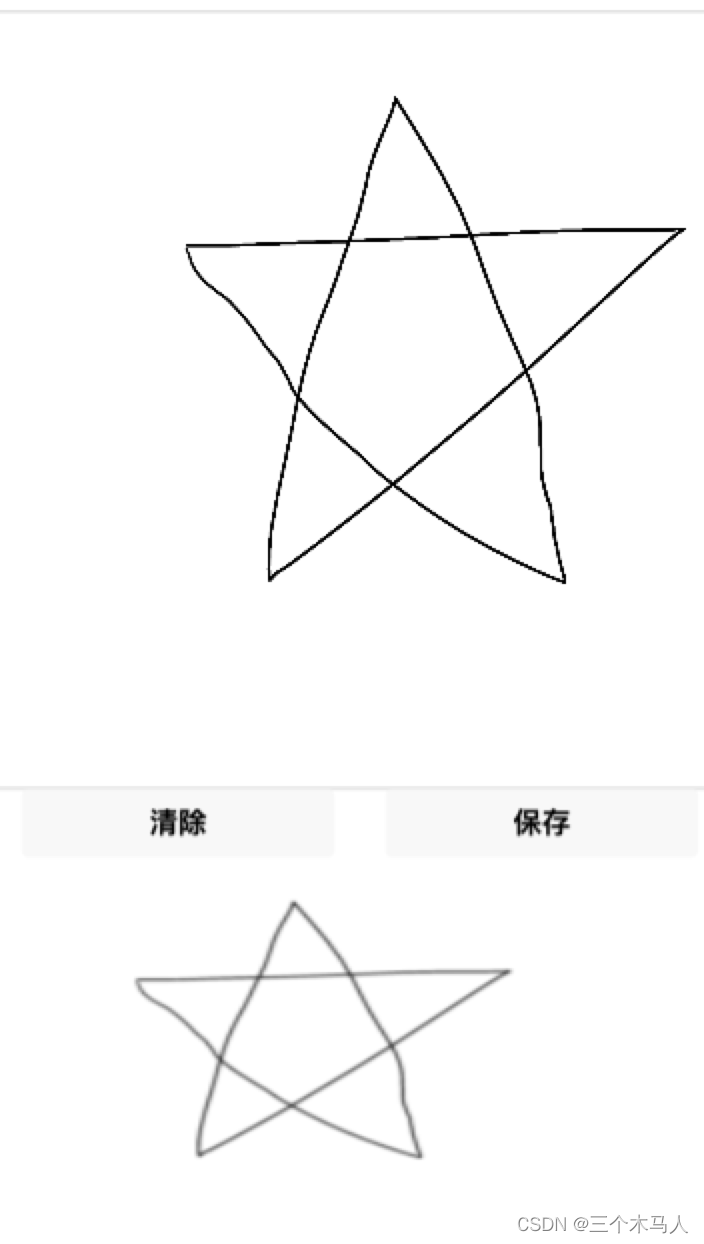
本文是在微信小程序中使用 canvas 2d 来实现签字板功能; 效果图: 代码: 1、wxml <view><canvas id"canvas"type"2d"bindtouchstart"start"bindtouchmove"move"bindtouchend"end&qu…...

区块链赋能新时代司法体系,中移链打造可信存证服务
近期,某百万级粉丝网红的法律维权之路引发社会关注。其在面对网络造谣行为时积极搜集证据,使用区块链技术将相关信息上链保全,然后将造谣者全部起诉,一系列操作被广大网友喻为是教科书式网络维权。 科技在发展,时代在…...
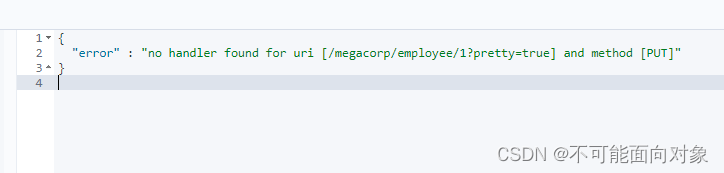
ELK报错no handler found for uri and method [PUT] 原因
执行后提示no handler found for uri and method post,最新版8.2的问题? 原因: index.mapping.single_type: true在索引上 设置将启用按索引的单一类型行为,该行为将在6.0后强制执行。 原 {type} 要改为 _doc,格式如…...
Sublime操作技巧笔记
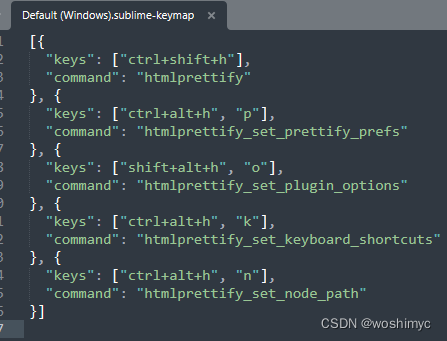
同时选中2个文件:自动切换成左右2个界面 格式化代码ctrlshifth: 使用快捷键ctrl shift p调出控制台,输入install package,然后输入html-css-js prettify,进行下载。具体的快捷键在preference > package setting &g…...
JVM | 基于类加载的一次完全实践
引言 我在上篇文章:JVM | 类加载是怎么工作的 中为你介绍了Java的类加载器及其工作原理。我们简单回顾下:我用一个易于理解的类比带你逐步理解了类加载的流程和主要角色:引导类加载器,扩展类加载器和应用类加载器。并带你深入了解…...

Termux实现电脑端远程操作【开启SSH的完整教程】
文章目录 前言一、安装软件1、安装2、启动服务3、特别说明4、添加key二、电脑端连接1、查看ip2、电脑端连接总结前言 上篇文章【安卓手机变身Linux服务器】讲了如何将你的上古安卓手机变废为宝,这节着重为大家解决一个痛点:“手机上操作实在是不方便”。 一、安装软件 1、安…...
java(Collection类)
文章目录 Collection接口继承树Collection接口及方法判断删除其它 Iterator(迭代器)接口迭代器的执行原理 foreach循环Collection子接口1:ListList接口特点List接口方法List接口主要实现类:ArrayListList的实现类之二:LinkedListList的实现类…...

VS2019编译安装OpenMesh8.0
文章目录 一、简介二、相关准备三、编译安装四、举个栗子参考资料一、简介 多边形网格一直以来就是交互式3D图形应用程序中最合适的几何表示,它们足够灵活,可以近似任意形状,并且可以通过当前的图形硬件有效地处理,即使在今天的低成本电脑上也是如此。OpenMesh便是其中一种…...

Python爬虫遇到URL错误解决办法大全
在进行Python爬虫任务时,遇到URL错误是常见的问题之一。一个错误的URL链接可能导致爬虫无法访问所需的网页或资源。为了帮助您解决这个问题,本文将提供一些实用的解决方法,并给出相关代码示例,希望对您的爬虫任务有所帮助。 一、…...

基于Vue+ElementUI+Echarts+G2Plot的大屏设计器,代码完全开源
简介 🔥DataRoom是一款基于SpringBoot、MyBatisPlus、ElementUI、G2Plot、Echarts等技术栈的大屏设计器,具备大屏设计、预览、资源管理、组件管理等能力,支持JSON、MySQL、Oracle、PostgreSQL、HTTP、JavaScript、Groovy等数据集接入&#x…...
Linux - PostgreSQL 适用于9.x 以上的 tar.gz 源码安装与理解 - 报错集锦
这里写目录标题 序言主要内容bash 配置文件个人理解关于初始化 PostgreSQL 数据库的理解 启动方法检查服务器是否在PostgreSQL中运行关闭 postgresql 数据库方法参考链接 序言 PostgreSQL 9.x 以下版本笔者没用过,具体操作看参考链接,笔者就不记录重复操…...
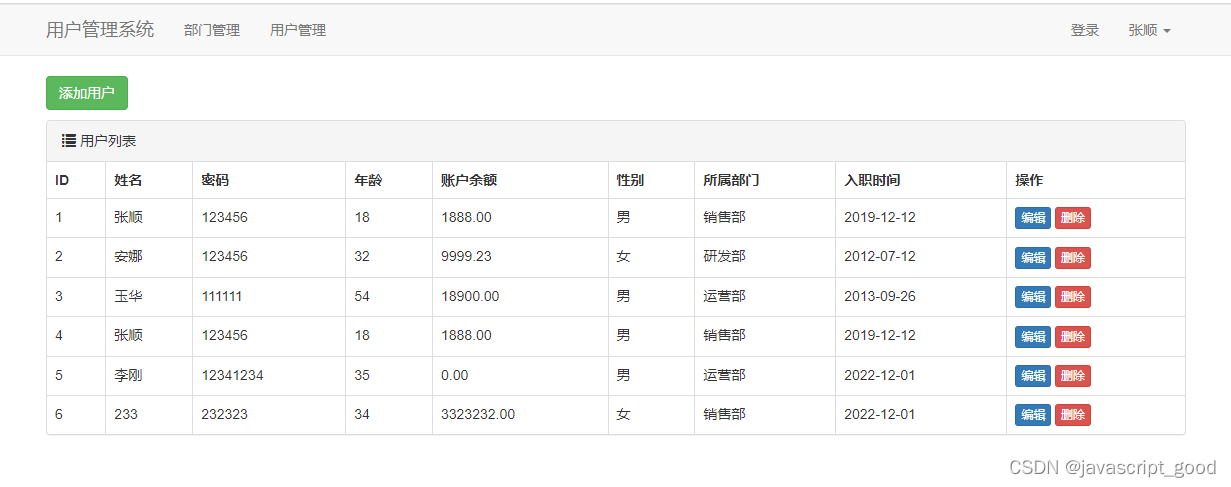
Django使用用户列表的展示和添加
接着上一篇:https://blog.csdn.net/javascript_good/article/details/132027702 来实现用户表的查询和添加 1、创建数据库表 在models.py 中,增加UserInfo类,包括字段姓名、密码、年龄、账号余额、入职时间、所属部门、性别 verbose_name 就…...

2026 西安 AI 问答曝光搭建技术解析:GEO 知识图谱 + 深度测评
随着大语言模型技术的快速普及,AI 搜索已经成为用户获取企业信息、商家服务的核心入口。根据中国互联网信息中心 2026 年发布的《中国人工智能搜索发展报告》显示,2025 年国内 AI 搜索用户规模突破 8.2 亿,日均搜索请求超过 20 亿次ÿ…...
损坏诊断全解)
半导体元件(二极管/三极管/MOS管/IC)损坏诊断全解
半导体元件(二极管、三极管、MOS 管、集成电路)是 PCB 的核心功能单元,对过压、过流、ESD、高温极度敏感,损坏后直接导致电路功能失效、短路烧板。很多工程师维修时盲目更换芯片,不仅成本高,还易误判。一…...

2026长沙智能家居品牌实测,这些本地老牌值得选
2026年,长沙的智能家居市场已经从“概念热”转向“落地战”。我走访了长沙多个本地服务商,实测了不同品牌在别墅、酒店、大平层等场景的真实表现。今天,结合数据与案例,分享几个值得关注的本地品牌,尤其是深耕8年以上的…...

什么情况下会核销贷款
贷款核销的核心前提是:贷款被认定为 “损失类” 且经 “穷尽追偿” 仍无法收回,银行按监管与会计规则从账面冲销,但债权不消灭、仍可追偿。一、核心认定条件(满足其一即可)破产 / 注销 / 吊销:借款人和担保…...

终极免费音乐解锁工具:5步轻松解密你的加密音乐文件
终极免费音乐解锁工具:5步轻松解密你的加密音乐文件 【免费下载链接】unlock-music 在浏览器中解锁加密的音乐文件。原仓库: 1. https://github.com/unlock-music/unlock-music ;2. https://git.unlock-music.dev/um/web 项目地址: https:/…...

收藏|2026年大模型算法岗崛起!程序员小白入门高薪赛道全攻略
前些年,算法岗位一直稳居技术圈高薪行列,无数程序员争相入局,也成为计算机专业毕业生求职首选方向。 伴随大模型技术飞速迭代落地,行业就业格局迎来重大变革。如今含金量最高、人才缺口最大、长期发展潜力顶尖的岗位,已…...

BetterNCM安装器终极指南:5分钟解锁网易云音乐无限潜能
BetterNCM安装器终极指南:5分钟解锁网易云音乐无限潜能 【免费下载链接】BetterNCM-Installer 一键安装 Better 系软件 项目地址: https://gitcode.com/gh_mirrors/be/BetterNCM-Installer 你是否觉得网易云音乐PC版功能有限,界面单调?…...

Godot 4.3随机地图性能优化:避开TileMap与RNG陷阱
1. 为什么刚写完第一版随机地图就崩溃?——从“能跑”到“能用”的真实断层你兴冲冲地照着教程敲完几十行GDScript,RandomNumberGenerator初始化了,for x in range(width)循环也套好了,甚至还在_draw()里用draw_rect()把每个格子都…...

Lovable电商网站搭建,为什么92%的初创团队在第3周就遭遇性能雪崩?
更多请点击: https://codechina.net 第一章:Lovable电商网站搭建 Lovable 是一个面向中小商户的轻量级电商解决方案,采用现代 Web 技术栈构建,强调可扩展性、用户体验与快速部署。其核心基于 Vue 3(Composition API&a…...

使用curl命令调试Taotoken API接口的常见问题排查
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用curl命令调试Taotoken API接口的常见问题排查 基础教程类,面向所有需要通过HTTP直接与API交互的开发者,…...