遮挡边界处的深度补全和双曲面外推
论文地址:Depth Completion with Twin Surface Extrapolation at Occlusion Boundaries
论文代码:https://github.com/imransai/TWISE
深度补全是从稀疏的已知深度值开始,为其余图像像素估计未知深度。
大多数方法将其建模为深度插值,并错误地将深度像素插值到空白区域,导致深度在遮挡边界处模糊问题。
深度补全的两个挑战,这两个挑战可能相互矛盾。第一个挑战是在对象内插值缺失的像素深度,利用附近的稀疏深度信息。第二个挑战是准确地找到对象的遮挡边界,并确保插值的像素属于前景或背景对象。
论文提出一种多假设深度表示,明确地对难以处理的遮挡边界区域中的前景和背景深度进行建模。该方法可以被看作是在这些区域中执行双表面外推,而不是插值。
方法称为双曲面估计(TWISE),而不是使用多个通道进行分拆,它使用了一个更有效的双曲面表示,并可以通过发现双曲面深度之间的差异来显式地建模模糊性。
为了训练双曲面估计器,论文提出了一对非对称损失函数,可以自然地将估计结果偏向前景和背景深度表面。损失函数中的非对称性是实现在模糊像素处分离前景和背景深度的关键。还加入了一个融合通道,自动将前景和背景深度组合成每个像素的最终深度估计,通过在模糊区域选择前景/背景深度,在非模糊区域混合两个深度。
方法
论文将深度补全分为两个较为简单的问题,每个问题都可以更容易地由网络学习。
第一个问题是深度插值,而无需确定边界。 与估计单个表面不同,关键创新在于估计双曲面。前景表面将前景对象的深度外推到边界之前和之后,而背景表面将背景深度外推到遮挡对象的后面。
第二个问题是找到边界,并通过融合这两个表面确定单个深度。 发现彩色图像在辅助表面融合方面特别有用。

上图为深度模糊出现在边界上。我们展示了地面实况深度(用红色标出)与图像重叠(a),SoTA方法估计的深度(b),论文融合的深度(c),论文估计的权重σ(d);SoTA的深度切片(e)论文的融合深度和σ切片(f),以及前景和背景切片(g)。在(g)中的外推能力导致(f)中的清晰深度边界,而不是(e)中的模糊深度。
模糊和期望损失
模糊对深度完成有很大的影响,有一个定量的方法来评估它们的影响是很有用的。论文提出使用期望损失来预测和解释歧义对已训练网络的影响。
所谓模糊,并不是指不存在唯一真实解,而是指在给定测量数据的情况下,算法和/或人类很难在两个或更多个不同的解决方案之间做出决定。
模糊可以更正式地定义如下:给定对场景的稀疏采样的测量数据,模糊的数量等于可能生成稀疏测量的不同真实场景的数量,也就是在论文的情况下,可能生成稀疏测量的不同真实深度图的数量。这个数量取决于实际数据中出现的变化。为了简化,论文独立地处理每个像素的模糊,因此对于一个像素来说,模糊是其可能的深度值,这些深度值与测量数据一致。
预期在不同场景中模糊的程度会有所不同。平面上的像素会很好地受到附近像素的约束,具有较低的模糊性。相比之下,接近深度不连续点的像素可能有很大的深度模糊。通常没有足够的深度图像数据来决定像素是在前景还是在背景上。
对应的彩色图像可以帮助解决像素属于前景还是在背景的模糊。
对于一个像素,要估计其深度 d d d , 假设这个像素有一对模糊集 d i d_i di , 每个模糊具有概率 p i p_i pi。这个概率度量了在模拟的场景假设下,地面真值将采取相应深度的可能性有多大。
现在考虑一个关于每个像素的误差的损失函数 L ( d − d t ) L(d-d_t) L(d−dt),其中 d t d_t dt 是地面真实深度。期望损失作为深度的函数为: E { L ( d ) } = ∑ i p i L ( d − d i ) . (1) \tag1 E\{L(d)\}=\sum_i p_i L (d-d_i). E{L(d)}=i∑piL(d−di).(1)这个期望损失很重要,因为如果一个网络是在代表性数据上训练的,那么它将被训练到最小化期望损失。通过检查期望损失,可以预测网络在模糊情况下的行为。
非对称线性误差
论文使用了一对误差函数:非对称线性误差(ALE)和反射非对称线性误差(RALE): A L E γ ( ϵ ) = max ( − 1 γ ϵ , γ ϵ ) (2) \tag2 ALE_\gamma(\epsilon)=\max (- \frac{1}{\gamma}\epsilon,\gamma \epsilon) ALEγ(ϵ)=max(−γ1ϵ,γϵ)(2) R A L E γ ( ϵ ) = max ( 1 γ ϵ , − γ ϵ ) (3) \tag3 RALE_\gamma(\epsilon)=\max ( \frac{1}{\gamma}\epsilon,- \gamma \epsilon) RALEγ(ϵ)=max(γ1ϵ,−γϵ)(3)
这里 ϵ \epsilon ϵ 是测量值和地面真值之间的差, γ γ γ 是参数, m a x ( a , b ) max(a,b) max(a,b)返回 a a a 和 b b b 中较大的一个。 ALE 和 RALE 是绝对误差的推广,与 γ = 1 γ=1 γ=1 时的绝对误差相同。
不同之处在于ALE的负侧以 1 / γ 1/γ 1/γ 加权,正侧以 γ γ γ 加权。 RALE 只是 ALE 在 ε = 0 ε=0 ε=0 线上的反射。
 ( a ) 公式(2)中的反射式非对称线性误差(ALE)在原点处的最小值是非对称的。
( a ) 公式(2)中的反射式非对称线性误差(ALE)在原点处的最小值是非对称的。
( b ) 公式(3)中的反射式非对称线性误差(RALE)是 ALE 的镜像。我们在前景表面估计中使用 ALE,而在背景估计中使用RALE。
( c ) 一个像素深度用两个不确定性深度 d 1 d1 d1 和 d 2 d2 d2 表示,并分别对应概率 p1 和 p2。
黑线表示 ALE 的期望,它是两个 ALE 函数的概率加权和。 ALE 的期望将在 d 1 d1 d1 和 d 2 d2 d2 出现的标记角之一处具有最小值。
需要注意的是,如果 γ γ γ 被 1 / γ 1/γ 1/γ 代替, A L E ALE ALE 和 R A L E RALE RALE 都被反射。 因此,在不丧失一般性的情况下,论文文对 γ ≥ 1 γ≥1 γ≥1 加以限制。
前景和背景估计器
二元模糊性由分别具有深度 d 1 d1 d1 和 d 2 d2 d2 的概率 p 1 p1 p1 和 p 2 p2 p2 的像素来描述。 当 d 1 < d 2 d1<d2 d1<d2 时,我们称 d 1 d1 d1 为前景深度, d 2 d2 d2 为背景深度。 这样的二元模糊性很可能发生在物体边界深度不连续点附近。
为了估计前景深度,提出了最小化所有像素的平均 ALE 来得到估计的前景面 d ^ 1 \hat d_1 d^1,为了从一个训练过的模糊像素的网络中预测 d ^ 1 \hat d_1 d^1 的特征,我们检验了预期的 ALE,如上图( c )所示。这是分段线性的,有两个角,一个在 d 1 d_1 d1,另一个在 d 2 d_2 d2。其中较小的一个将决定最小期望损失,并因此决定了理想网络的预测。
使用公式(2)和(1),可以获得期望损失: L ( d 1 ) = p 2 ( d 2 − d 1 ) / γ , L ( d 2 ) = p 1 ( d 2 − d 1 ) γ L(d_1)=p_2(d_2-d_1)/ \gamma,L(d_2)=p_1(d_2-d_1)\gamma L(d1)=p2(d2−d1)/γ,L(d2)=p1(d2−d1)γ。从这里可以很简单地看到, γ > p 2 p 1 (4) \tag 4 \gamma>\sqrt {\frac {p_2}{p_1}} γ>p1p2(4) 在上述条件下, L ( d 1 ) < L ( d 2 ) L(d_1)<L(d_2) L(d1)<L(d2) 成立。这个方程表明了前景估计器对 γ γ γ 的灵敏度; γ γ γ 越高,在前景深度 d 1 d_1 d1 处最小所需的前景 p 1 p_1 p1 上的概率越低。
为了估计边界处的背景深度 d ^ 2 \hat d_2 d^2,论文提出了最小化期望 RALE。这里与 ALE 分析类似,得到与公式(4)中相同的 γ γ γ 约束,只是概率比率被颠倒了。
图1(b)是一个前景深度估计示例,(c)是背景深度,(f)是深度差异。我们观察到,在远离深度不连续性的像素以及稀疏的输入深度像素中,前景深度非常接近背景深度,表明没有歧义。
融合深度估计器
前景和背景深度估计为每个像素提供深度的下界和上界。 将最终的融合深度估计器 d ^ t \hat d_t d^t 表示为真实深度 d t d_t dt 的加权组合: d ^ t = σ d ^ 1 + ( 1 − σ ) d ^ 2 (5) \tag 5 \hat d_t = \sigma \hat d_1 + (1-\sigma)\hat d_2 d^t=σd^1+(1−σ)d^2(5)其中 σ σ σ 是介于 0 和 1 之间的估计值。 使用平均绝对误差作为融合损失的一部分: F ( σ ) = ∣ d ^ t − d t ∣ = ∣ σ d ^ 1 + ( 1 − σ ) d ^ 2 − d t ∣ . (6) \tag 6 F(\sigma) = |\hat d_t - d_t|=|\sigma\hat d_1+(1-\sigma)\hat d_2 - d_t|. F(σ)=∣d^t−dt∣=∣σd^1+(1−σ)d^2−dt∣.(6)预期损失为: L e ( σ ) = E { F ( σ ) } = p ∣ σ d ^ 1 + ( 1 − σ ) d ^ 2 − d 1 ∣ + ( 1 − p ) ∣ σ d ^ 1 + ( 1 − σ ) d ^ 2 − d 2 ∣ . (7) \tag 7 L_e(\sigma) = E\{F(\sigma)\} = p|\sigma \hat d_1 + (1- \sigma)\hat d_2 - d_1|+(1-p)|\sigma \hat d_1 +(1-\sigma)\hat d_2 - d_2|. Le(σ)=E{F(σ)}=p∣σd^1+(1−σ)d^2−d1∣+(1−p)∣σd^1+(1−σ)d^2−d2∣.(7) 这里, p = p 1 p =p_1 p=p1, p 2 = 1 − p p_2=1-p p2=1−p。 当 p > 0.5 p>0.5 p>0.5 时,在 σ = 1 σ=1 σ=1 处有一个最小值;当 p < 0.5 p<0.5 p<0.5 时,在 σ = 0 σ=0 σ=0 处有一个最小值,这假定深度为 d 1 d_1 d1 或 d 2 d_2 d2。
深度面表示
将所有的损失函数组合成一个单一的损失: L ( c 1 , c 2 , c 3 ) = 1 N ∑ j N ( A L E γ ( c 1 j ) + R A L E γ ( c 2 j ) + F ( s ( c 3 j ) ) ) . (8) \tag 8 L(c_1,c_2,c_3) = \frac 1 N \sum_j^N(ALE_\gamma(c_{1j})+RALE_\gamma(c_{2j})+F(s(c_{3j}))). L(c1,c2,c3)=N1j∑N(ALEγ(c1j)+RALEγ(c2j)+F(s(c3j))).(8)这里 c i j {c_ij} cij 是指通道 i i i 的像素 j j j, s ( ) s() s() 是 sigmoid 函数,并且取所有 n n n 个像素的平均值。论文将训练网络的这三个通道的输出解释为 c 1 → d ^ 1 c_1 \to \hat d_1 c1→d^1, c 2 → d 2 ^ c_2 \to \hat{ d_2} c2→d2^, s ( c 3 ) → σ s(c_3) \to \sigma s(c3)→σ,并把它们结合起来,就像在公式(5)中获得每个像素的深度估计器 d ^ t \hat d_t d^t 一样。
使用3个通道进行多尺度监督。总损失是多分辨率损失Li的加权和,其中 L 1 L_1 L1 是公式(8)中的全分辨率 3 通道损失, L 2 L_2 L2 是半分辨率损失, L 3 L_3 L3 是四分之一分辨率损失: L = ω 1 L 1 + ω 2 L 2 + ω 3 L 3 L = ω_1L_1 + ω_2L_2 + ω_3L_3 L=ω1L1+ω2L2+ω3L3
总结
在物体之间或者物体的前景与背景之间存在遮挡关系。这会导致深度图在遮挡边界处出现不连续的情况,从而影响深度估计的准确性。论文提出了TWISE,一种新的用于深度图像的双曲面表示和估计方法,旨在解决遮挡边界处的深度估计问题。
通过建模前景和背景的双曲面来估计深度。在遮挡边界处,前景双曲面外推前景物体的深度,背景双曲面外推背景的深度,从而在遮挡区域更准确地估计深度。提出了非对称损失函数,即 ALE 和 RALE,将这些双曲面估计偏向于具有深度模糊的前景和背景像素。论文输出的第三个通道融合了这些估计,以实现单一的表面估计。这个解决方案简化了学习深度不连续性的任务,因此更好地维持了边界上的逐步深度不连续性,并生成了SOTA深度估计。
与传统深度补全相比:
1.双曲面外推方法: 本方法使用双曲面外推来处理深度补全问题。具体而言,它通过建模前景和背景的双曲面,分别在遮挡区域外推前景物体和背景的深度。这种方法能够更好地处理遮挡边界处的深度估计,提高深度图的连续性和准确性。
2.非对称损失函数: 该方法引入了一种非对称损失函数,用于训练网络进行深度估计和融合。这种损失函数有助于在深度估计中区分前景和背景深度,从而更好地处理遮挡问题。
3.连续性和准确性: 传统的深度补全方法可能在遮挡边界处出现深度不连续或估计不准确的问题。而这种双曲面外推方法能够更好地保持深度图的连续性,并提高深度估计的准确性,特别是在遮挡边界处。
4.任务目标: 传统的深度补全方法可能更注重插值技术或使用传统的回归方法来估计深度。而这种方法则专注于处理遮挡问题,通过外推来估计遮挡边界处的深度,从而更适用于处理需要考虑物体遮挡情况的场景。
可能存在的问题: 由于地面真实像素的稀疏性,远处深度像素估计的学习会受到限制。

相关文章:
遮挡边界处的深度补全和双曲面外推
论文地址:Depth Completion with Twin Surface Extrapolation at Occlusion Boundaries 论文代码:https://github.com/imransai/TWISE 深度补全是从稀疏的已知深度值开始,为其余图像像素估计未知深度。 大多数方法将其建模为深度插值&#x…...

LK-99室温超导激发万万亿市场,将对我们的生活产生哪些影响?
7月下旬,韩国量子能源研究中心公司相关研究团队在预印本网站上陆续公布两篇类似的论文,宣称一种命名为LK-99的铜掺杂铅磷灰石材料拥有“室温常压”超导能力,系全世界首款室温常压超导材料。 它们的实验方法比较简单,就是把铅、铜、…...

子集——力扣78
文章目录 题目描述法一 迭代法实现子集枚举题目描述 法一 迭代法实现子集枚举 class Solution {public:vector<int> t;vector<vector<...
)
【计算机视觉 | 目标检测 | 图像分割】arxiv 计算机视觉关于目标检测和图像分割的学术速递(8 月 2 日论文合集)
文章目录 一、检测相关(8篇)1.1 Explainable Cost-Sensitive Deep Neural Networks for Brain Tumor Detection from Brain MRI Images considering Data Imbalance1.2 MonoNext: A 3D Monocular Object Detection with ConvNext1.3 Detecting Cloud Presence in Satellite Ima…...

JDK中「SPI」原理分析
基于【JDK1.8】 一、SPI简介 1、概念 SPI即service-provider-interface的简写; JDK内置的服务提供加载机制,可以为服务接口加载实现类,解耦是其核心思想,也是很多框架和组件的常用手段; 2、入门案例 2.1 定义接口 …...
)
DSL:数字用户线路(Digital Subscriber Line)
一、基础释义 DSL(数字用户线路,Digital Subscriber Line)是一种用于传输数字数据的通信技术,允许数据在传统的电话线路(铜线)上进行高速传输。DSL技术通过将高频信号叠加在低频的语音信号上,使…...

Java集合ArrayList详解
ArrayList 类是一个可以动态修改的数组,与普通数组的区别就是它是没有固定大小的限制,我们可以添加或删除元素。 ArrayList 继承了 AbstractList ,并实现了 List 接口。 Java 数组 与 ArrayList 在Java中,我们需要先声明数组的大…...
React Dva项目 Model中编写与调用异步函数
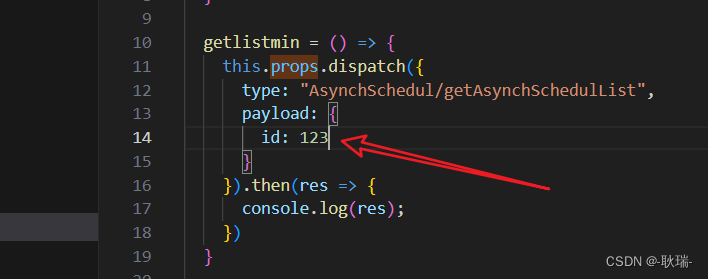
上文 React Dva项目中模仿网络请求数据方法 中,我们用项目方法模拟了后端请求的数据 那么 今天我们就在models中尝试去使用一下这种异步获取数据的方法 之前 我们在文章 React Dva项目创建Model,并演示数据管理与函数调用 中已经接触过Model了 也可以理解为 它就是 …...

小程序自定义tabBar+Vant weapp
1.构建npm,安装Vant weapp: 1)根目录下 ,初始化生成依赖文件package.json npm init -y 2)安装vant # 通过 npm 安装 npm i vant/weapp -S --production 3)修改 package.json 文件 开发者工具创建的项…...
Dubbo+Zookeeper使用
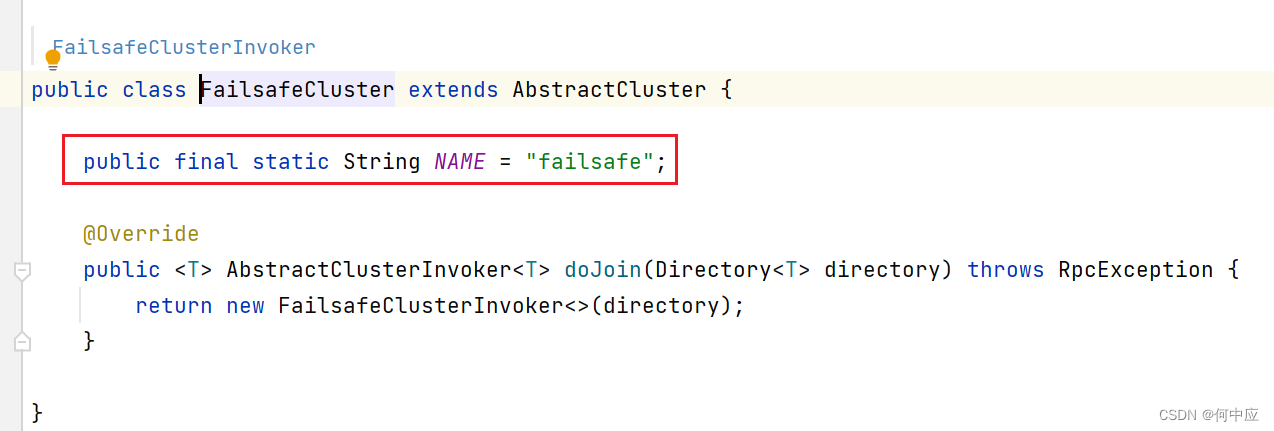
说明:Apache Dubbo 是一款 RPC 服务开发框架,用于解决微服务架构下的服务治理与通信问题,官方提供了 Java、Golang 等多语言 SDK 实现。 本文介绍Dubbo的简单使用及一些Dubbo功能特性,注册中心使用的是ZooKeeper,可在…...

短视频平台视频怎么去掉水印?
短视频怎么去水印,困扰很多人,例如,有些logo水印,动态水印等等,分享操作经验: 抖音作为中国最受欢迎的社交娱乐应用程序之一,已成为许多人日常生活中不可或缺的一部分。在使用抖音过程中&#x…...
Stable Diffusion - Style Editor 和 Easy Prompt Selector 提示词插件配置
欢迎关注我的CSDN:https://spike.blog.csdn.net/ 本文地址:https://spike.blog.csdn.net/article/details/132122450 Style Editor 插件: cd extensions git clone https://ghproxy.com/https://github.com/chrisgoringe/Styles-Editor报错&…...

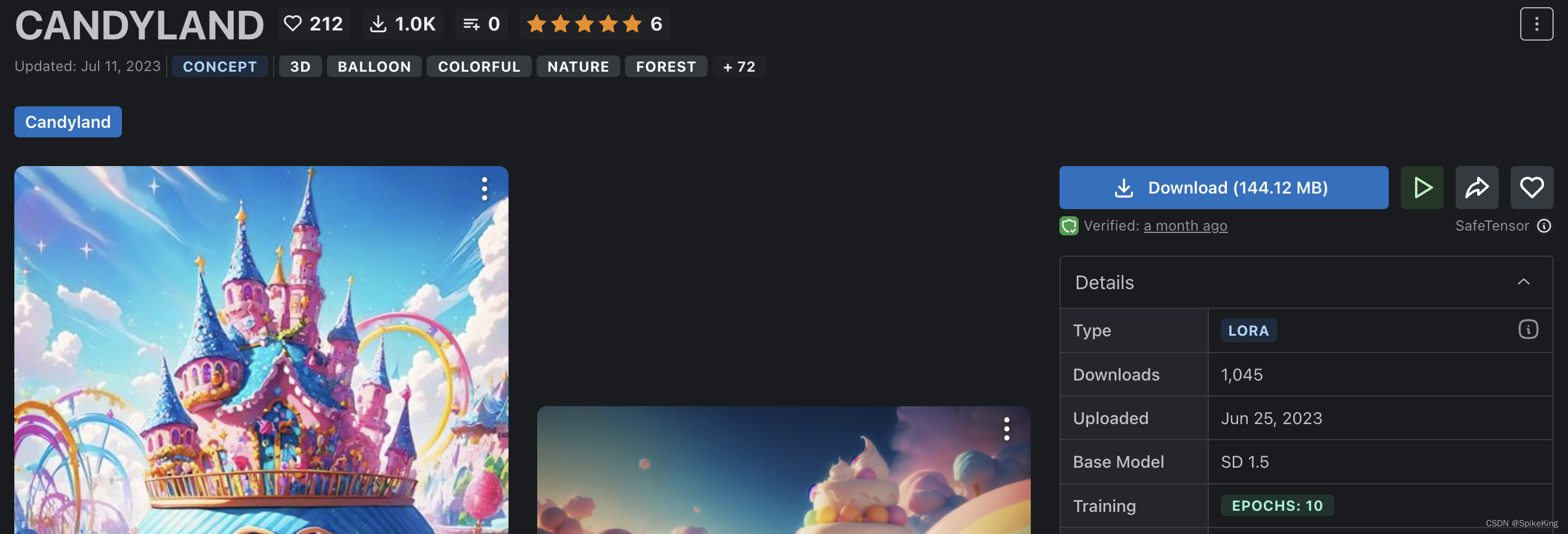
Stable Diffusion - SDXL 模型测试 (DreamShaper 和 GuoFeng v4) 与全身图像参数配置
欢迎关注我的CSDN:https://spike.blog.csdn.net/ 本文地址:https://spike.blog.csdn.net/article/details/132085757 图像来源于 GuoFeng v4 XL 模型,艺术风格是赛博朋克、漫画、奇幻。 全身图像是指拍摄对象的整个身体都在画面中的照片&…...
中介者模式(Mediator)
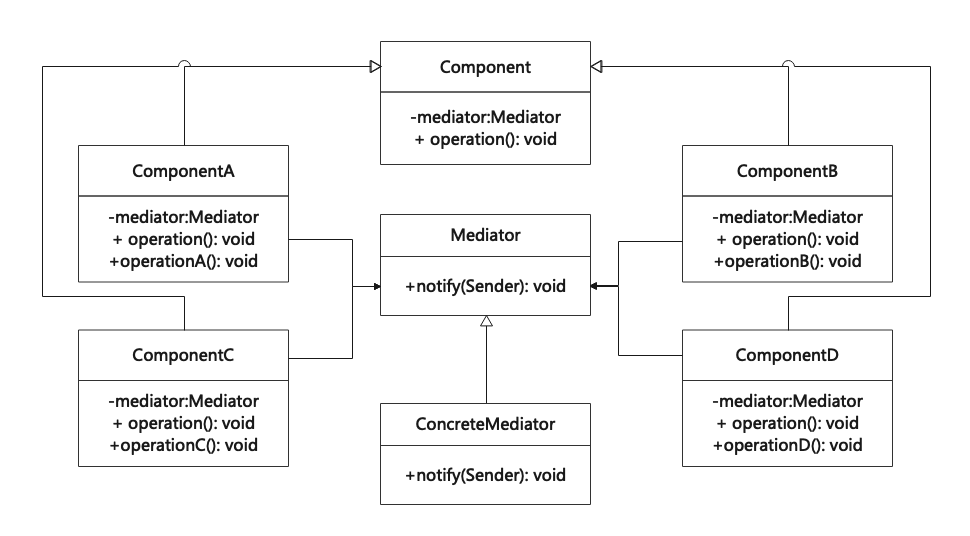
中介者模式是一种行为设计模式,可以减少对象之间混乱无序的依赖关系。该模式会限制对象之间的直接交互,迫使它们通过一个封装了对象间交互行为的中介者对象来进行合作,从而使对象间耦合松散,并可独立地改变它们之间的交互。中介者…...
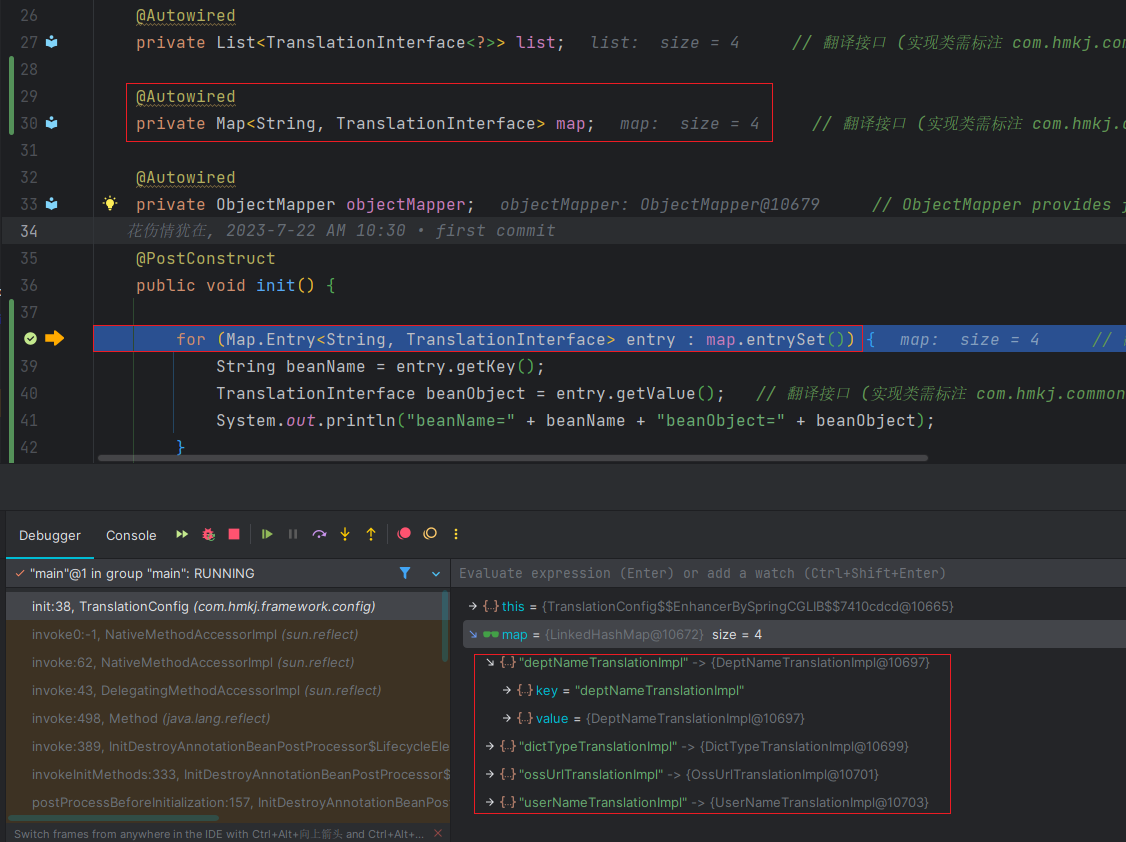
SpringBoot使用@Autowired将实现类注入到List或者Map集合中
前言 最近看到RuoYi-Vue-Plus翻译功能 Translation的翻译模块配置类TranslationConfig,其中有一个注入TranslationInterface翻译接口实现类的写法让我感到很新颖,但这种写法在Spring 3.0版本以后就已经支持注入List和Map,平时都没有注意到这…...

【linux目录的权限和粘滞位】
目录: 目录的权限粘滞位总结 目录的权限 可执行权限: 如果目录没有可执行权限, 则无法cd到目录中. 可读权限: 如果目录没有可读权限, 则无法用ls等命令查看目录中的文件内容. 可写权限: 如果目录没有可写权限, 则无法在目录中创建文件, 也无法在目录中删除文件. 粘…...
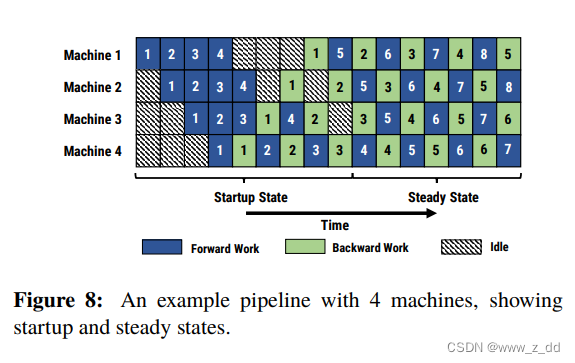
TP DP PP 并行训练方法介绍
这里写目录标题 张量并行TP流水线并行 PPnaive模型并行GPipePipeDream 数据并行DPFSDP 张量并行TP 挖坑 流水线并行 PP 经典的流水线并行范式有Google推出的Gpipe,和微软推出的PipeDream。两者的推出时间都在2019年左右,大体设计框架一致。主要差别为…...

P005 – Python操作符、操作数和表达式
在Python中,操作符用于对值或变量进行操作。操作数是操作符作用的值或变量。表达式是由操作符、操作数和其他表达式组合而成的,可以求得一个值。 在本文中,我们将探讨Python中的不同类型的操作符,学习如何与操作数一起使用它们来…...
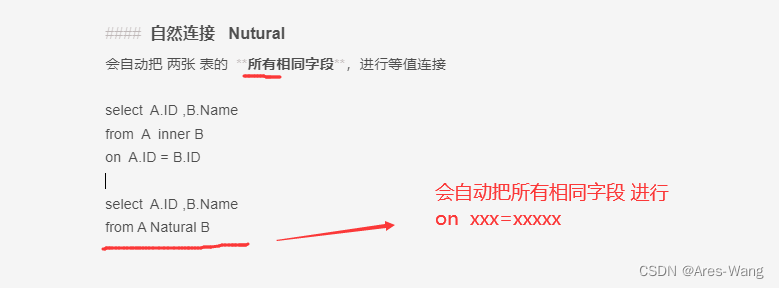
SQL92 SQL99 语法 Oracle 、SQL Server 、MySQL 多表连接、Natural 、USING
SQL92 VS SQL 99 语法 92语法 内连接 from table1, table2 where table1.col table2.col 外连接 放在 从表 左连接: from table1, table2 where table1.col table2.col() 右连接: from table1, table2 where table…...
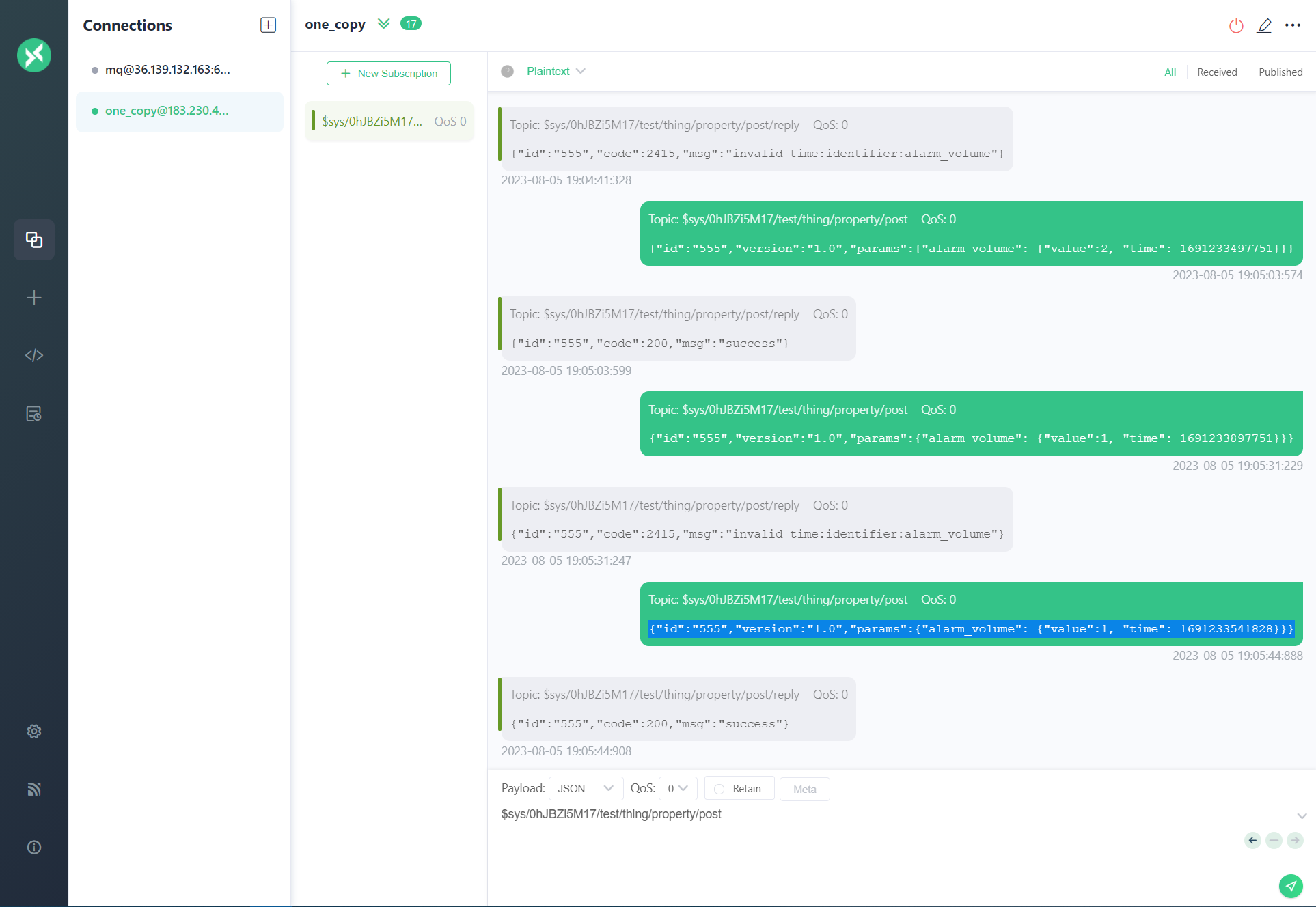
物联网平台使用笔记
阿里云的IOT平台限制了50个设备。排除 移动云的限制较少,这里试用下。 创建完产品,接入设备后。使用MQTT客户端测试 其中client id 为设备id, username 为产品id, password 可以使用设备调试那里生成的。或使用官方token.exe 生成…...

全面革新你的Mac菜单栏:Ice管理工具的终极使用指南
全面革新你的Mac菜单栏:Ice管理工具的终极使用指南 【免费下载链接】Ice Powerful menu bar manager for macOS 项目地址: https://gitcode.com/GitHub_Trending/ice/Ice macOS菜单栏常常被各种应用图标占据,导致视觉混乱且操作不便。Ice作为一款…...

Pytorch自动微分模块:从原理到实战,解锁反向传播核心奥秘
Pytorch自动微分模块:从原理到实战,解锁反向传播核心奥秘一、核心认知:自动微分,深度学习的求导"神器"1.1 自动微分的核心价值1.2 核心公式:参数更新的底层逻辑(1)权重更新公式&#…...
生活中遇到的知识:(转发需官方授权)有些饭店办公的人多所以有个办公地的营业执照也会有一个饭店的营业执照这种情况起码这个主打饭店运营的办公地的公司有起码有两个子饭店其中一个是主饭店。)
(转发需官方授权)生活中遇到的知识:(转发需官方授权)有些饭店办公的人多所以有个办公地的营业执照也会有一个饭店的营业执照这种情况起码这个主打饭店运营的办公地的公司有起码有两个子饭店其中一个是主饭店。
(转发需官方授权)生活中遇到的知识:(转发需官方授权)有些饭店办公的人多所以有个办公地的营业执照也会有一个饭店的营业执照这种情况起码这个主打饭店运营的办公地的公司有起码有两个子饭店其中一个是主饭店。...

NFL十年追踪数据与机器学习创新
某机构十年NFL下一代数据统计创新 每场NFL比赛都会产生数百万个来自22名佩戴RFID设备的球员的追踪数据点。75个机器学习模型在云端处理这些数据,耗时不到一秒,将橄榄球运动转变为每一次移动都被测量、建模并即时分析的运动。 最初,每支俱乐部…...

为Darktable注入胶片灵魂:t3mujinpack胶片模拟包完全指南
为Darktable注入胶片灵魂:t3mujinpack胶片模拟包完全指南 【免费下载链接】t3mujinpack Collection of film emulation presets for open-source RAW developer software Darktable. 项目地址: https://gitcode.com/gh_mirrors/t3/t3mujinpack 你是否曾羡慕那…...

5个高效命名技巧:用猫抓实现智能文件管理与批量处理
5个高效命名技巧:用猫抓实现智能文件管理与批量处理 【免费下载链接】cat-catch 猫抓 浏览器资源嗅探扩展 / cat-catch Browser Resource Sniffing Extension 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 在数字资源爆炸的时代,…...
HSTracker全能助手:炉石传说数据追踪与套牌管理实战指南
HSTracker全能助手:炉石传说数据追踪与套牌管理实战指南 【免费下载链接】HSTracker A deck tracker and deck manager for Hearthstone on macOS 项目地址: https://gitcode.com/gh_mirrors/hs/HSTracker 副标题:从新手到大师的macOS炉石辅助工具…...

终极指南:如何用ComfyUI-MimicMotionWrapper实现AI动作迁移
终极指南:如何用ComfyUI-MimicMotionWrapper实现AI动作迁移 【免费下载链接】ComfyUI-MimicMotionWrapper 项目地址: https://gitcode.com/gh_mirrors/co/ComfyUI-MimicMotionWrapper ComfyUI-MimicMotionWrapper是一款强大的AI动作迁移插件,让任…...

Python自动化抢票脚本:从原理到实战的完整实现指南
Python自动化抢票脚本:从原理到实战的完整实现指南 【免费下载链接】DamaiHelper 大麦网演唱会演出抢票脚本。 项目地址: https://gitcode.com/gh_mirrors/dama/DamaiHelper 在数字化时代,热门演出门票的抢购已成为技术与速度的竞争。自动化抢票技…...
)
Win7/Win11亲测有效!SAS9.2报错“OLE对象未注册”的保姆级修复指南(附VC++库下载)
SAS9.2跨系统兼容性实战:彻底解决"OLE对象未注册"错误 当你在Windows 11上打开那个尘封已久的SAS9.2项目时,熟悉的错误提示突然跳出——"OLE:对象的类没有在注册数据库中注册"。这个看似简单的兼容性问题,背…...